FreeRtosШЮЮёЛжИДгыЙвЦ№
БОЦЊФкШнЗжЯэЕФЪЧFreeRtosжаЕФШЮЮёЛжИДгыЙвЦ№ЁЃ
гаЪБКђЮвУЧашвЊНЋднЭЃФГИіШЮЮёЕФдЫаа,Й§вЛЖЮЪБМфвдКѓдкжиаТдЫааЁЃетИіЪБКђЪЧвЊЪЪгІШЮЮёЩОГ§КЭжиНЈЕФЗНЗЈЕФЛАФЧУДШЮЮёжаБфСПБЃДцЕФжЕПЯЖЈЖЊСЫ!FreeRtosИјЮвУЧЬсЙЉСЫНтОіетжжЮЪЬтЕФЗНЗЈ,ФЧОЭЪЧШЮЮёЕФЛжИДгыЙвЦ№,ЕБФЊИіШЮЮёвЊЭЃжЙдЫаавЛЖЮЪБМфЕФЛАОЭНЋетИіШЮЮёЙвЦ№,ЕБвЊжиаТдЫааетИіШЮЮёЕФЛАОЭЛжИДетИіШЮЮёЕФдЫаа,FreeRtosЕФШЮЮёЙвЦ№гыЛжИДAPIКЏЪ§ШчЯТ:
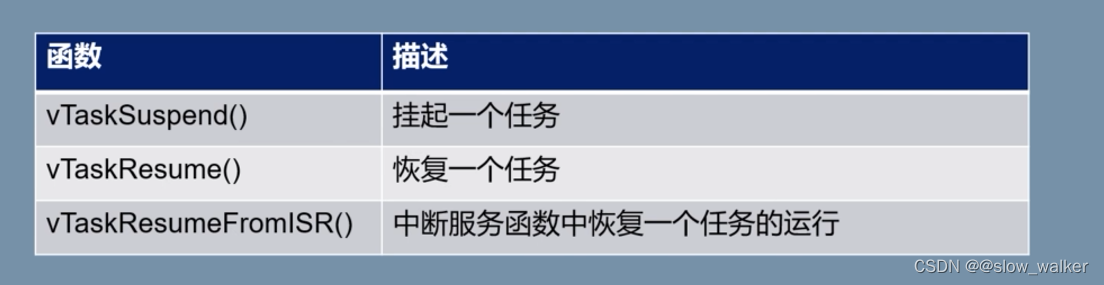

vTaskSuspend()КЏЪ§
ДЫКЏЪ§гУгкНЋФГИіШЮЮёЩшжУЮЊЙвЦ№ЬЌ,НјШыЙвЦ№ЬЌЕФШЮЮёгРдЖЖМВЛЛсНјШыдЫааЬЌЁЃЭЫГіЙвЦ№ЬЌЕФЮЈвЛЗНЗЈОЭЪЧЕїгУШЮЮёЛжИДКЏЪ§ vTaskResume()xTaskResumeFromISR()
/*-----------------------КЏЪ§даЭ-------------------*/
void vTaskSuspend( TaskHandle_t xTaskToSuspend )
//ВЮЪ§ЮЊШЮЮёОфБњ
вЊЙвЦ№ЕФШЮЮёЕФШЮЮёОфБњ,ДДНЈШЮЮёЕФЪБКђЛсЮЊУПИіШЮЮёЗжХфвЛИіШЮЮёОфБњЁЃШчЙћЪЙгУКЏЪ§ xTaskCreate()ДДНЈШЮЮёЕФЛАФЧУДКЏЪ§ЕФВЮЪ§pxCreatedTask ОЭЪЧДЫШЮЮёЕФШЮЮёОфБњ,ШчЙћЪЙгУКЏЪ§ xTaskCreateStatic()ДДНЈШЮЮёЕФЛАФЧУДКЏЪ§ЕФЗЕЛижЕОЭЪЧДЫШЮЮёЕФШЮЮёОфБњЁЃвВПЩвдЭЈЙ§КЏЪ§ xTaskGetHandle()РДИљОнШЮЮёУћзжРДЛёШЁФГИіШЮЮёЕФШЮЮёОфБњЁЃ
зЂвт!ШчЙћВЮЪ§ЮЊ NULL ЕФЛАБэЪОЙвЦ№ШЮЮёздМКЁЃ
vTaskResume()
/*--------------------КЏЪ§даЭ------------------*/
void vTaskResume( TaskHandle_t xTaskToResume )
//ВЮЪ§ЮЊШЮЮёОфБњ
НЋвЛИіШЮЮёДгЙвЦ№ЬЌЛжИДЕНОЭаїЬЌ,жЛгаЭЈЙ§КЏЪ§ vTaskSuspend()ЩшжУЮЊЙвЦ№ЬЌЕФШЮЮёВХПЩвдЪЙгУ vTaskRexume()ЛжИДЁЃ
xTaskResumeFromISR()
/*-------------------КЏЪ§даЭ------------------*/
BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume)
ДЫКЏЪ§ЪЧ vTaskResume()ЕФжаЖЯАцБО,гУгкдкжаЖЯЗўЮёКЏЪ§жаЛжИДвЛИіШЮЮё
ЗЕЛижЕ:
pdTrue:ЛжИДдЫааЕФШЮЮёЕФШЮЮёгХЯШМЖЕШгкЛђепИпгке§дкдЫааЕФШЮЮё(БЛжаЖЯДђЖЯЕФШЮЮё),етвтЮЖзХдкЭЫГіжаЖЯЗўЮёКЏЪ§вдКѓБиаыНјаавЛДЮЩЯЯТЮФЧаЛЛЁЃ
pdFALSE: ЛжИДдЫааЕФШЮЮёЕФШЮЮёгХЯШМЖЕЭгкЕБЧАе§дкдЫааЕФШЮЮё(БЛжаЖЯДђЖЯЕФ
ШЮЮё),етвтЮЖзХдкЭЫГіжаЖЯЗўЮёКЏЪ§ЕФвдКѓВЛашвЊНјааЩЯЯТЮФЧаЛЛЁЃ
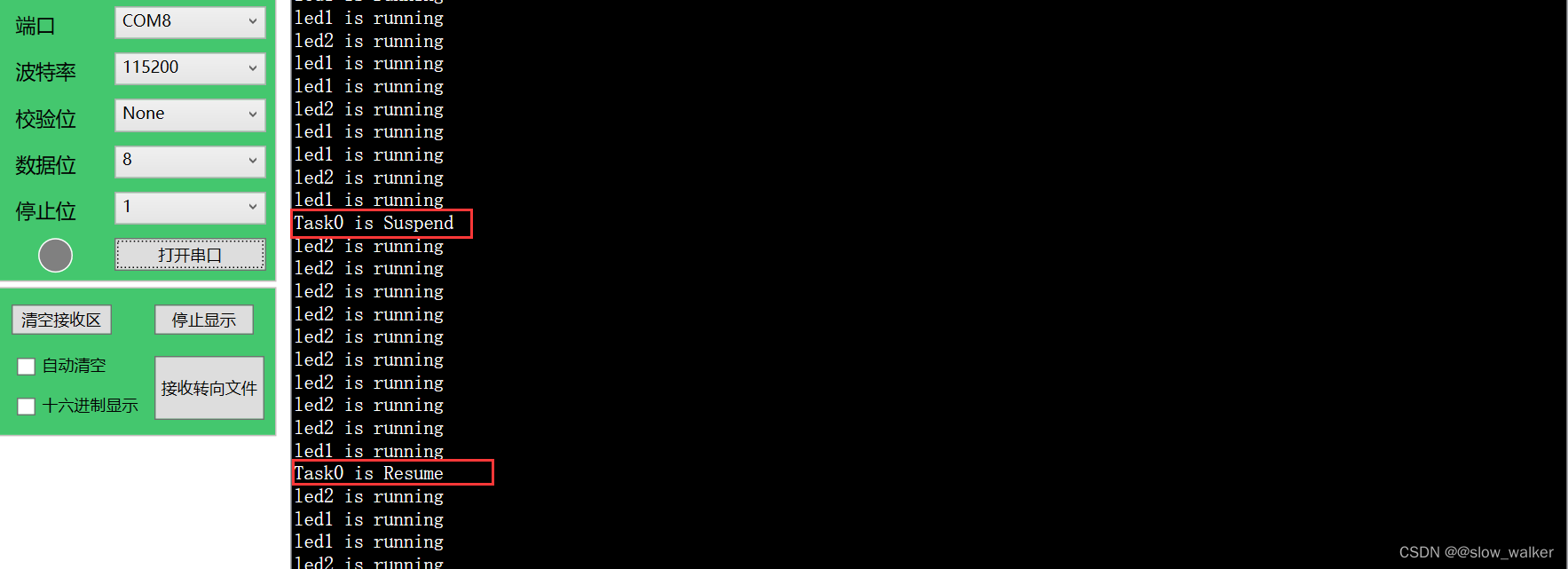
ЪЕбщашЧѓ
ЭЈЙ§СНИіАДМќРДПижЦLED0ЕФЙвЦ№гыЛжИД
key.h
#ifndef _KEY_H_
#define _KEY_H_
#include "stm32f10x.h"
#include "delay.h"
//#define KEY0 GPIO_Pin_5
//#define KEY1 GPIO_Pin_6
//#define KEY2 GPIO_Pin_7
//#define KEY3 GPIO_Pin_8
//#define KEY4 GPIO_Pin_9
#define GPIO_PORT GPIOB
#define GPIO_PIN GPIO_Pin_4|GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9
#define KEY0 GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_9) //ЖСGPIOЖЫПкЕФЪфШы,ЪфШыЕШгк0ЗЕЛи1
#define KEY1 GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_8) //ЖСGPIOЖЫПкЕФЪфШы,ЪфШыЕШгк0ЗЕЛи2
#define KEY2 GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_7) //ЖСGPIOЖЫПкЕФЪфШы,ЪфШыЕШгк0ЗЕЛи3
#define KEY3 GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_6) //ЖСGPIOЖЫПкЕФЪфШы,ЪфШыЕШгк0ЗЕЛи4
#define KEY4 GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_4) //ЖСGPIOЖЫПкЕФЪфШы,ЪфШыЕШгк0ЗЕЛи4
#define KEY_ON 0 //АДМќАДЯТЮЊ0
#define KEY_OFF -1 //АДМќУЛгаАДЯТЮЊ-1
#define KEY0_Value 1 //АДМќ1ЕФЗЕЛижЕ
#define KEY1_Value 2 //АДМќ1ЕФЗЕЛижЕ
#define KEY2_Value 3 //АДМќ2ЕФЗЕЛижЕ
#define KEY3_Value 4 //АДМќ3ЕФЗЕЛижЕ
#define KEY4_Value 5 //АДМќ4ЕФЗЕЛижЕ
#define Error -2 //ДэЮѓжЕЗЕЛи
void KEY_GPIO_INIT(void);
unsigned char KEY_Scan(void);
#endif
key.c
void KEY_GPIO_INIT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
//ЖРСЂМќХЬЩЈУшКЏЪ§
unsigned char KEY_Scan(void)
{
// KEY_GPIO_INIT();
//keyvalue = 0;
if(KEY0==0||KEY1==0||KEY2==0||KEY3==0)
{
delay_ms(20);//ШЅЖЖЖЏ
if(KEY0==0) //АДМќ0АДЯТ
{
while(KEY0 == 0);
return KEY0_Value;
}
else if(KEY1==0) //АДМќ1АДЯТ
{
while(KEY1 == 0);
return KEY1_Value;
}
else if(KEY2==0) //АДМќ2АДЯТ
{
//delay_ms(10);
while(KEY2 == 0);
return KEY2_Value;
}
else if(KEY3==0) //АДМќ3АДЯТ
{
//delay_ms(10);
while(KEY3 == 0);
return KEY3_Value;
}
else if(KEY4==0)
{
while(KEY4 == 0);
return KEY4_Value;
}
}
return 0;// ЮоАДМќАДЯТ
}
жїКЏЪ§
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"
#include "key.h"
//ШЮЮёгХЯШМЖ
#define START_TASK_PRIO 1
//ШЮЮёЖбеЛДѓаЁ
#define START_STK_SIZE 128
//ШЮЮёОфБњ
TaskHandle_t StartTask_Handler;
//ШЮЮёКЏЪ§
void start_task(void *pvParameters);
//ШЮЮёгХЯШМЖ
#define LED0_TASK_PRIO 4
//ШЮЮёЖбеЛДѓаЁ
#define LED0_STK_SIZE 50
//ШЮЮёОфБњ
TaskHandle_t LED0Task_Handler;
//ШЮЮёКЏЪ§
void led0_task(void *pvParameters);
//ШЮЮёгХЯШМЖ
#define LED1_TASK_PRIO 3
//ШЮЮёЖбеЛДѓаЁ
#define LED1_STK_SIZE 50
//ШЮЮёОфБњ
TaskHandle_t LED1Task_Handler;
//ШЮЮёКЏЪ§
void led1_task(void *pvParameters);
//АДМќШЮЮё
#define KEY_TASK_PRIO 2
//ШЮЮёЖбеЛДѓаЁ
#define KEY_STK_SIZE 50
//ШЮЮёОфБњ
TaskHandle_t KEYTask_Handler;
//ШЮЮёКЏЪ§
void key_task(void *pvParameters);
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//ЩшжУЯЕЭГжаЖЯгХЯШМЖЗжзщ4
delay_init(); //бгЪБКЏЪ§ГѕЪМЛЏ
uart_init(115200); //ГѕЪМЛЏДЎПк
LED_Init(); //ГѕЪМЛЏLED
KEY_GPIO_INIT(); //АДМќГѕЪМЛЏ
//ДДНЈПЊЪМШЮЮё
xTaskCreate((TaskFunction_t )start_task, //ШЮЮёКЏЪ§
(const char* )"start_task", //ШЮЮёУћГЦ
(uint16_t )START_STK_SIZE, //ШЮЮёЖбеЛДѓаЁ
(void* )NULL, //ДЋЕнИјШЮЮёКЏЪ§ЕФВЮЪ§
(UBaseType_t )START_TASK_PRIO, //ШЮЮёгХЯШМЖ
(TaskHandle_t* )&StartTask_Handler); //ШЮЮёОфБњ
vTaskStartScheduler(); //ПЊЦєШЮЮёЕїЖШ
}
//ПЊЪМШЮЮёШЮЮёКЏЪ§
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //НјШыСйНчЧј
//ДДНЈLED0ШЮЮё
xTaskCreate((TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )LED0_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED0_TASK_PRIO,
(TaskHandle_t* )&LED0Task_Handler);
//ДДНЈLED1ШЮЮё
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//ДДНЈАДМќШЮЮё
xTaskCreate((TaskFunction_t )key_task,
(const char* )"key_task",
(uint16_t )KEY_STK_SIZE,
(void* )NULL,
(UBaseType_t )KEY_TASK_PRIO,
(TaskHandle_t* )&KEYTask_Handler);
vTaskDelete(StartTask_Handler); //ЩОГ§ПЊЪМШЮЮё
taskEXIT_CRITICAL(); //ЭЫГіСйНчЧј
}
//LED0ШЮЮёКЏЪ§
void led0_task(void *pvParameters)
{
while(1)
{
LED0=~LED0;
vTaskDelay(500);
printf("led1 is running\r\n");
}
}
//LED1ШЮЮёКЏЪ§
void led1_task(void *pvParameters)
{
while(1)
{
LED1=0;
vTaskDelay(200);
LED1=1;
vTaskDelay(800);
printf("led2 is running\r\n");
}
}
//АДМќШЮЮёКЏЪ§
void key_task(void *pvParameters)
{
while(1)
{
//ЙІФмДњТы
//ЪЙгУСНИіе№ЖЏДЋИаЦї вЛИігУгкЙвЦ№ вЛИігУгкНтЙв
if(GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_9) == 0)
{
delay_ms(20); //ЯћЖЖ
while(GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_9) == 0); //ЕШД§АДМќЬЇЦ№
vTaskDelay(100);
//ЙвЦ№
vTaskSuspend(LED0Task_Handler);
printf("Task0 is Suspend\r\n");
}
if(GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_8) == 0)
{
delay_ms(20); //ЯћЖЖ
while(GPIO_ReadInputDataBit(GPIO_PORT,GPIO_Pin_8) == 0); //ЕШД§АДМќЬЇЦ№
vTaskDelay(100);
//ЙвЦ№
vTaskResume(LED0Task_Handler);
printf("Task0 is Resume\r\n");
}
}
}
ЪЕбщНсЙћ