BLDC�������MCU
�漰��G����ŷ����ӱ��,�����鶯������о�ص�;������TI��ST��
PWMģ���PWMTģ�����ST�ĸ���ʱ����ͨ�ö�ʱ������,��ع��ܼ����߷�����CSDN����:(1����Ϣ) PWM��PWMT_Yuule�IJ���-CSDN����
����ɷü�¼�ɼ�����������BLDC�������MCU��ϵ�����⡷
�����㷨˵���ɼ�������BLDC&PMSM�㷨˵����
git��Դ��ĿiBLDC iBLDC/BLDC��������&PMSM��FOC���ۺ�.md at master �� Staok/iBLDC (github.com)
��������ܹ�
����
һ��ĵ�������������±���ʾ,
?
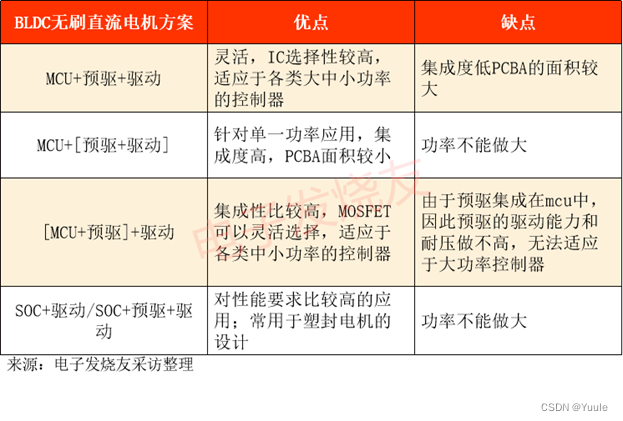
���
�����ϱ��ĵ������,
����MCUӲ���ܹ�������Էֳ�����,һ���Ǵ�����,��һ���Dz���������
���д������Ļ���������ϸ����,�ֱ���GATE/3P3N/6N,��ͼ����ŷ���۷�MCUʾ��,?
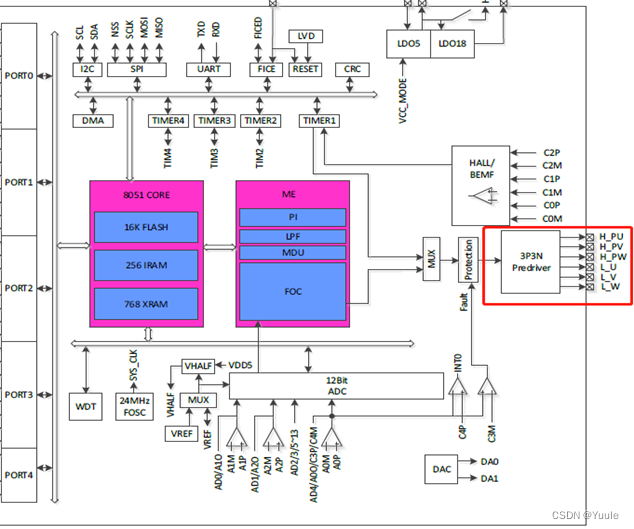 ͼ �۷�FU6832
ͼ �۷�FU6832
?
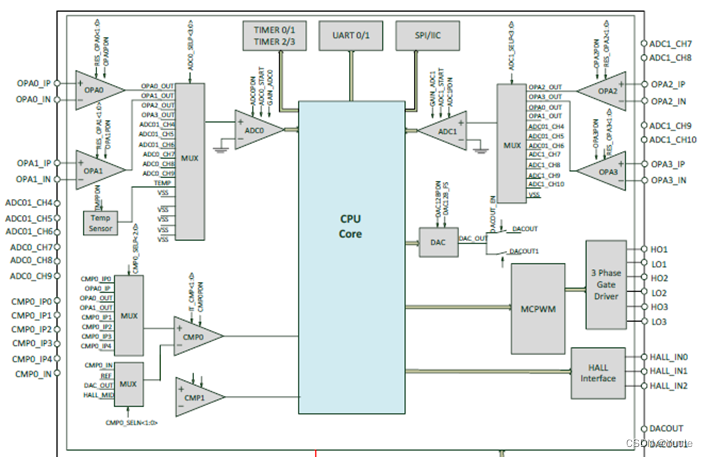 ͼ ��ŷLKS32MC066
ͼ ��ŷLKS32MC066
?
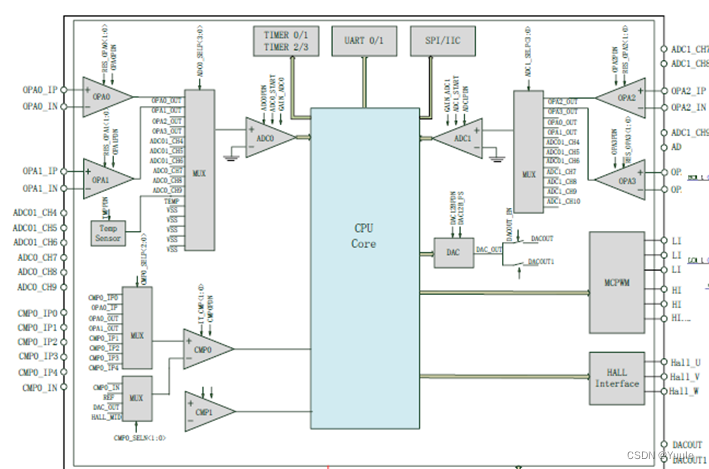 ͼLKS32MC061
ͼLKS32MC061
?
������±��Ա�,���ڸ���оƬ�϶��ѡȡ���־��д����Ե�MCU��
��1
| ������˾ | ������MCU | ��������MCU | ��ע |
| CCORE | CCM4201s | ||
| ��G | FU6831��FU6832 (3P3N) | Gate/3P3N/6N����,��ѡMCU������3P3N | |
| ��ŷ | LKS32MC066 (Gate) | LKS32MC062 LKS32MC061 LKS32AT085(����) | ��������,���������ڵ����������ؽӿ�,HALL�ӿڵ� |
| ��ӱ | SH33F2811 (Gate) | SH32F205 SH79F2202A | ��������,�����㷨SVPWM���ٵ�Ԫ,QEI�ӿ�(����������) |
| �鶯 | MM32SPIN422C MM32SPIN360C (Gate) | MM32SPIN0280 | |
| ���� | HC32M120 HC32M140 | ||
| ��о�� | SWM190 SWM201 | ������,���㷨����ģ��,QEI�ӿ� | |
| ST | STSPIN32F0 (Gate) | ���� | ���˷������㷨�� |
| TI | TMS320F28002x (DSP) | ���ⷽ�����㷨 | |
| ���� | - | - | ��MCU��Ʒ,Ϊ������ICģ�� |
оƬ��Դ�Ա�
�����excel��BLDC�������оƬ��Դ��
���Ա�BLDC��Ҫʹ�õ�Ӳ����Դ����Ҫ��оƬ���ܡ�
���
�������dz��ḻ,�����չ�����Դ���ࡢ��;�Լ��ṹ����ԭ������,�������ͼ,
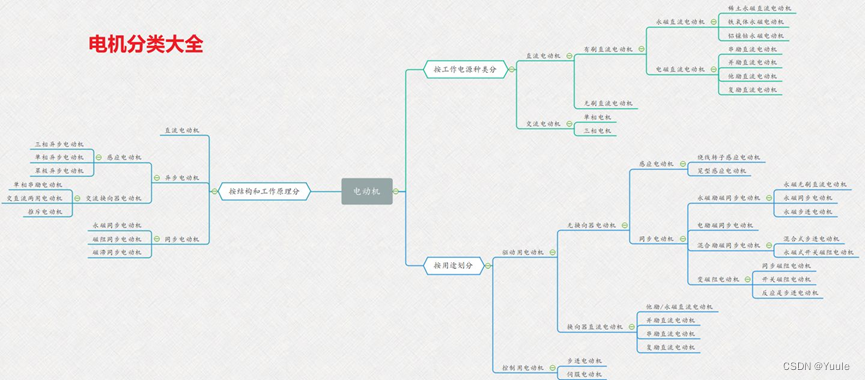 ͼ �������
ͼ �������
?
���ż�������,Ŀǰ������������ˢ���,������Ҫ��ע��ˢֱ�����BLDCM������ͬ�����PMSM��
�ṹ
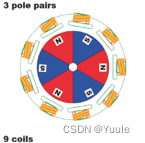
BLDCM��PMSM����ڻ����ܹ�������ͬ��,���Ƕ�����ת��������,��������;����ת���붨�ӵ�����ò������ת��,����������������,ͨ����Ȧ���鷽��͵�����������ж���Ȧ�ż�����,����ϸ����ƺͿ����ϴ�������
 ?
? ?
?
ͼ ��ˢ����ṹת�Ӷ���(��9����3���������)
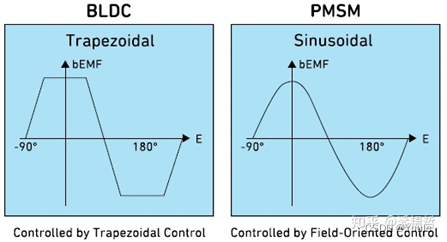
BLDCM��������������ˢ���,��Ȼ��������ʽҲ�Ƿ�������,����Ϊ���������������,���ת�ӻ���Ƴ��з����ų��ġ����������ȵĵȺ���������ǵ���ķ��綯�ƻ��������β���
PMSM�����Ҳ�����,Ϊ��������Ҳ�������,����ų��ᱻ���Ϊ���Ҳ��ų�(�������Dz�չ��������϶�ų�������г��),���綯��Ҳ��֮���������ԡ�
 ?
?
ͼ ���β����綯��/���Ҳ����綯��
PWM�������㷨
PWM����
������ȵ���,PWM���Ʒ�ʽ�кܶ���,������<���Ӧ�ú��㷨>�й�ע������������������ּ���������,SPWM��SVPWM��
��ͨ��PWM,ͨ������/�ݼ�������,�ɸ����������ɲ�ͬռ�ձȵķ�����
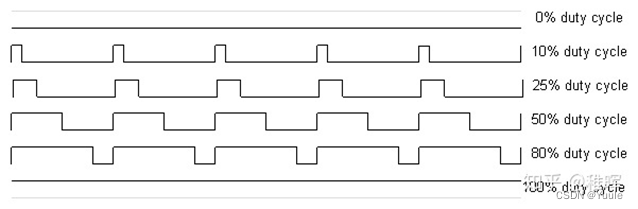
ͼ ��ͬռ�ձ�PWM
?
����PWM���,һ�Ի���PWM���������ռ�ձȻ����ķ���,ʾ������ͼ,
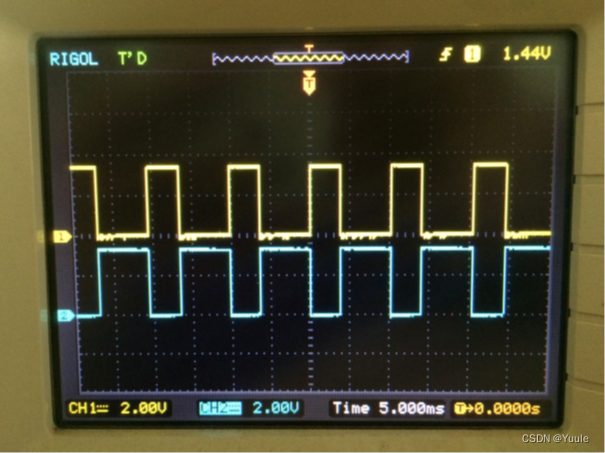
ͼ �������PWM
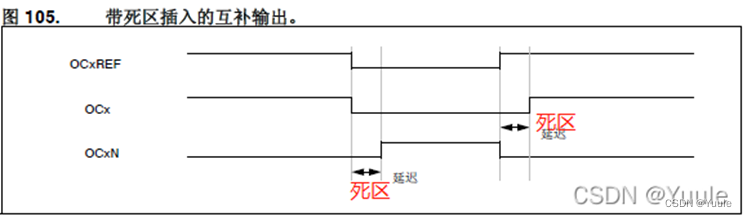 ͼ �������Ļ���PWM
ͼ �������Ļ���PWM
?
�㷨&PWM���Ʒ�ʽ
�ɼ�������BLDC&PMSM�㷨˵���������ͼƬĿ¼��ͼƬ˵����
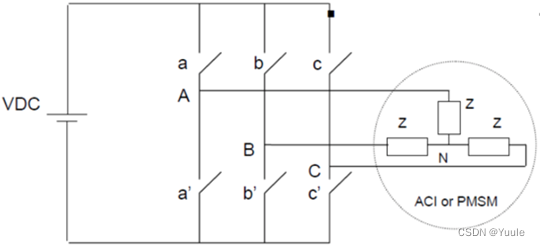
ͼ ��������·
?
120����Ʒ���
���û���ֵ(ÿ����������6�α仯),�ı�UVW���������,��ͬһ����ֵ�ڵ�������,�κ�ʱ��ֻ��һ������ź���һ������ŵ�ͨ,���ֿ��Ʒ�ʽ��,���������60�ȵ�ת��ƫ��,Ч�ʽ���,ͬʱ�����ת��������
��Ȼ���ǿ���ͨ����������ͼ���������С�����ᵽ��60������С�

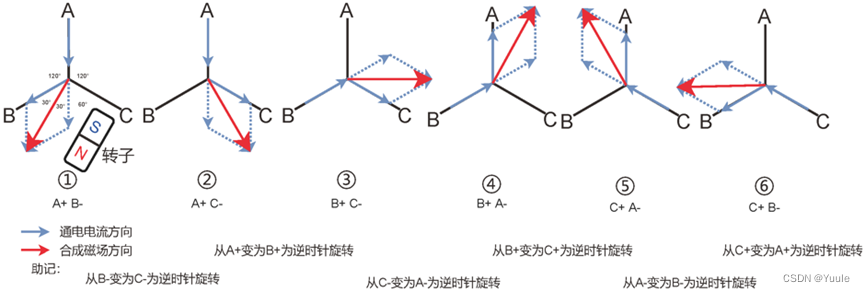
ͼ ����6�ִų�����
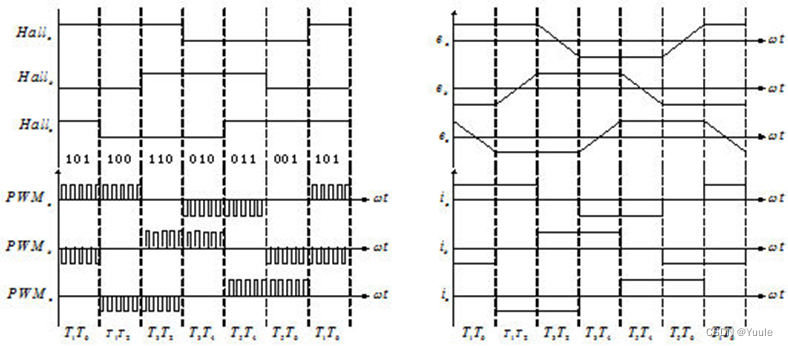 ͼ HALL״̬��PWM�����෴�綯�ơ��������
ͼ HALL״̬��PWM�����෴�綯�ơ��������
?
?
����PWM��������ʽ��������,1�ǻ��������,2�ǵ������,��͵�������ʵ������BLDCMʱ���ڼ���ն����ʽ��
SPWM���Dz�����
ͨ�������ز�����Ʋ��ıȽ�,ȷ��SPWM���Ρ�����SVPWM��ʽһ��,��Ϊ�˵õ��������ҹ��ɱ仯�ķ�����
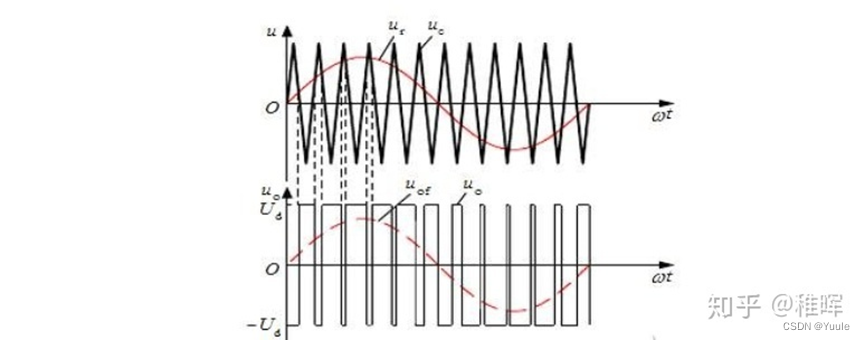 ͼ PWM��Ч����
ͼ PWM��Ч����
?
����SPWM���Ʒ�ʽ��FOC�ų���������в�����(ʵ��������һ�����ѹ���Ʒ�ʽ),ԭ����SPWMҪ��SVPWMĸ�ߵ�ѹ�����ʵ�15%����,����ͼ��
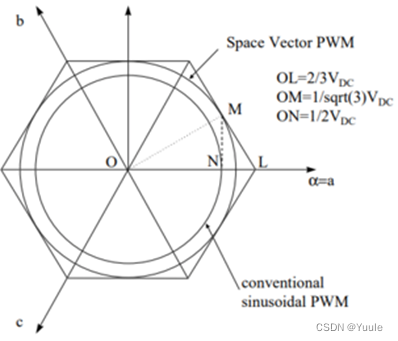
ͼ SVPWM��SPWM�Ƚ�
?
SVPWM�ռ�ʸ������
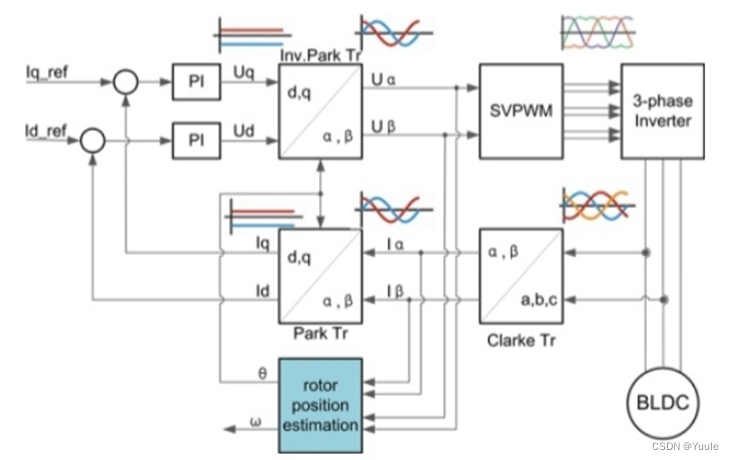 ͼ ��������
ͼ ��������
?
- �Ե������������в����õ� Ia,Ib,Ic
- ��Ia,Ib,Ic ?���� Clark�任 �õ�? I��,I��
- ��I��,I��?����Park�任�õ�?Id,Iq
- ����??Id,Iq�����趨ֵ?Id_ref,Iq_ref?�����
- �����������������PID(ֻ�õ�PI)������,�õ�����Ŀ��Ƶ�ѹ? Uq,Ud
- ��Uq,Ud���з�Park�任�õ�?U��,U��?
- ��?U��,U�ºϳɵ�ѹ�ռ�ʸ��,����SVPWMģ����е���,�����ʱ���������ŵ�״̬����ֵ(����ͼ��)
- ����ǰ������ı���ֵ���������������MOS�ܿ���,�������
- ѭ����������
�� cba״̬���뼴��/�ߵ�ѹ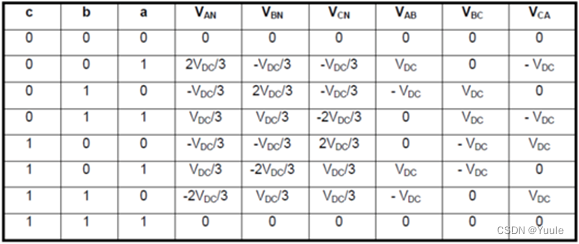
?
PMSM��matlab����
����������ϰ���״̬matlab���沨��,�����simulinkģ��<PMSM_FOC>
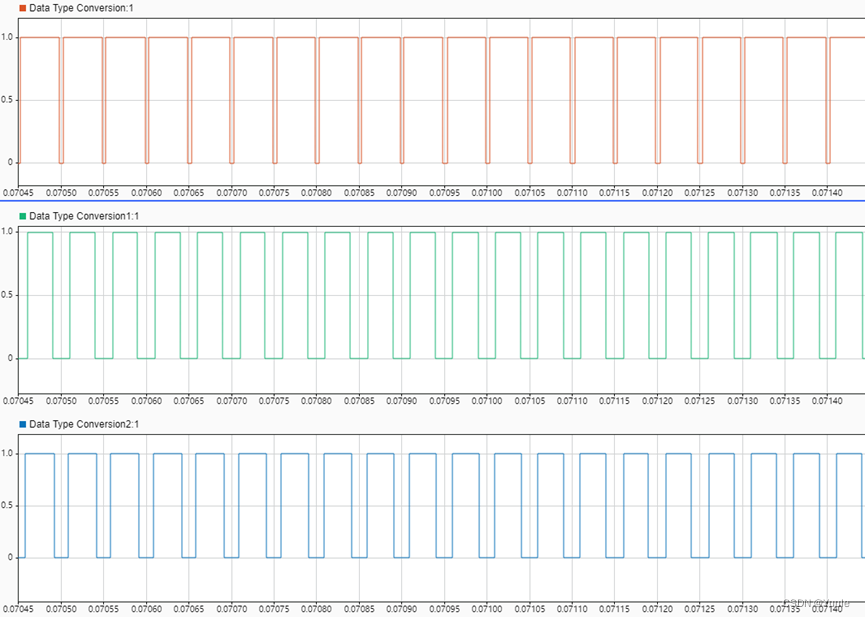 ͼ SVPWM�ϰ��ŷ��沨��ʾ��
ͼ SVPWM�ϰ��ŷ��沨��ʾ��
?
���Ӧ��
�ڵ��������,������Ҫ֪���������������Ϣ:1���������;2����Ƕ�;3��ת��ת�١�
���������������:
1������Ԫ��;2������������;3����������(�ͳɱ� ����+�˷�,�Ͷ˲�������˫���������)
��ǶȲ�������:
1���ű�����;2������Ԫ��;3���۲���
ת��ת�ٲ�������:
1��������;2���ɵ�Ƕȹ���
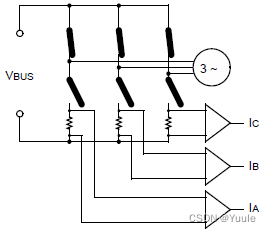
�����������
����������

ͼ �����������������������
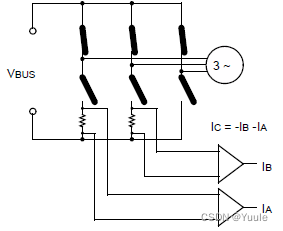
һ��ʹ����������,ͨ��KCL,Ia+Ib+Ic = 0,�������������������
����������(�൱�ڱ�ѹ��)
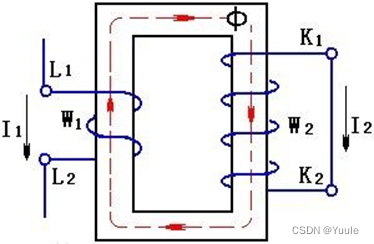
ͼ ��������������
?
��������
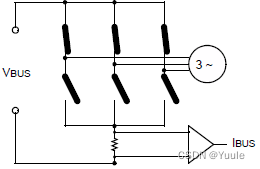
ͼ �Ͷ˵��������ʽ
��ǶȲ���
����������+��ת������
һTI C2000MCUΪ��,ͨ�����������������źŹ����ʼλ��,Ȼ��ͨ����ת��������Z��ͬ���ź�,�����ۼ�����������������,����ֱ�Ӷ�ȡ�Ĵ���QPOSCNT�Ĵ����ļ�����ȷ������ʱ�̵ľ���λ�á�
ת��ת�ٲ���
��ת������
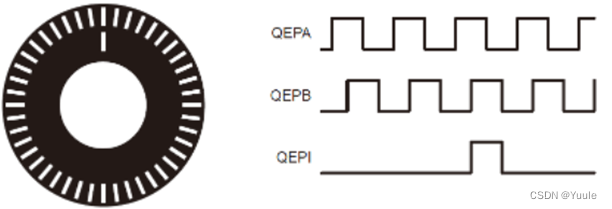
ͼ ��ת�������ṹ���ź����
?
ͨ�����ַ�ʽ����ת��,
1 �̶�ʱ��,������������
2 �̶�����,����������ʱ�䡣
�������Ӧ�ù�˾�з���Ա��̸
�����������BLDC�������MCU��ϵ�����⡷
����:��Ƶ100M����,eflashһ��IJ��ᳬ��256KB,sramһ����32K����;��Ҫ6·PWM(3��������ͻ�������),3·ADC,3·�Ƚ�����3·�Ŵ�����
ij��˾:��Ҫ6·����PWM,2·��ʱ��/������,adc,2��amp,2��CMP
��¼
������ʽ��ͼ���ʽ
1 ת��:һ������,������ֿɳ�Ť��,��λ N��m
��ʽ ת��T = F �� r (�� �� ����)
2 ת��:���ÿ����תȦ��,��λ r/min��
������ij����ٶ�:V = �� �� r ( ���ٶ� �� ij������),��λ rad/s��������V ��ת��N ���ת��:�� = (2pi / 60)�� N
3 ����:P = F��V = T���� = a��T��N
4 ���鷴�綯��:Դ�Ը����綯��,��������ת����Ȧ�Ĵų������仯,������Ӧ�綯�ơ�������ζ���(��Ӧ�����Ĵų���Ҫ�谭�����Ӧ�����Ĵ�ͨ���ı仯)�жϡ�
??? �����綯��,E = n������/��t
??? ��ͨ��:�� = B��S��cos��(B�ǴŸ�Ӧǿ��,S����Ȧƽ�����,������Ȧƽ�淨����Ÿ�Ӧǿ��B�ļн�)
5 �ز���:mfΪ�����ز��ź�Ƶ��fc�����ҵ��Ʋ��ź�Ƶ��f֮��,��mf = fc / f
6 �������:mmΪ���ҵ����źŷ�ֵVm�����Dz��źŷ�ֵVsm֮��,��mm = Vm / Vsm
7 ն��:�ֳ�DC-DC�任,ָ��һ��ֵ��ֱ����ѹ��Ϊ��һ��ֵ��ֱ����ѹ��
PID����
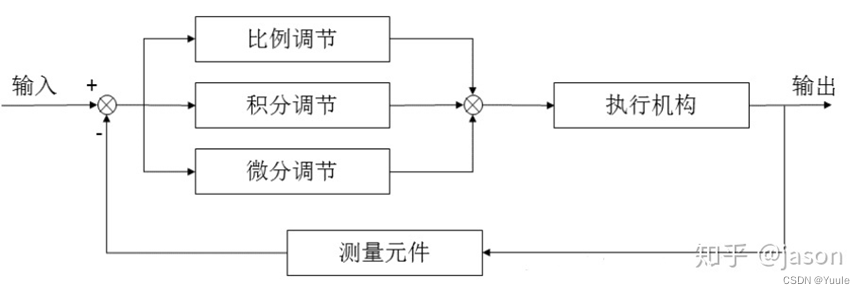 ͼ PID���ƿ�ͼ
ͼ PID���ƿ�ͼ
?
��ʽ����:

ͼ ������ʽ
?

ͼ ��ɢ��ʽ
?
Kp-------��������
Ki= (Kp*T)/Ti------���ֳ���
Kd=(Kp*Td)/T------�ֳ���
Clark�任&Park�任
��PMSMģ��,ʹ�ý�ֹ����ϵclark�任��ͬ����ת����Park�任
Clark
����Ȼ����ϵabc�任����-������ϵ
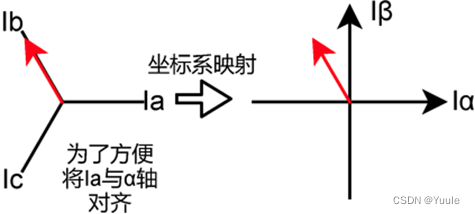
ͼ clark�任
?
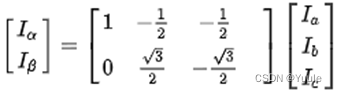
�任��ʽ����:
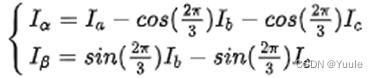
д�ɾ���:
 ?
?
ע:������ʽû�п���Լ������,���任ǰ���ֵ������Ҫ����ϵ��2/3;���任ǰ���ʲ���,ϵ����Ϊsqrt(2/3)
Park
����ֹ����ϵ��-�� ����ͬ����ת����ϵd-p
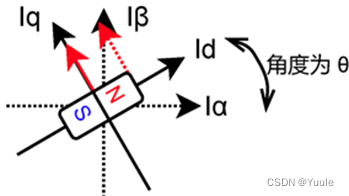
ͼ park�任
?
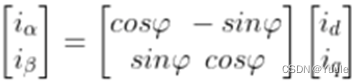
�任����:
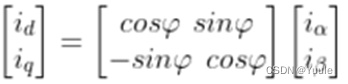
��park�任����:
��Դ��Ŀ
Git��Դ��Ŀ�����:iBLDC/BLDC��������&PMSM��FOC���ۺ�.md at master �� Staok/iBLDC (github.com)
�����:
ֱ����ˢ���������ͬ�������ʲô����? - ����ܵĻش� - ֪��?
�������!��ȫ�ĵ������,����һƪ����! - ֪�� (zhihu.com)
����ԳƵ���ͨ����dq��������ͶӰ�õ���Id��Iq��ͨ��park�任�õ���Id��Iq��ʲô�������ϵô? - ֪�� (zhihu.com)
��ˢֱ�������PWM���Ʒ�ʽ����-���ӹ���ר�� (eet-china.com)
Ϊʲô���������ܲ������Ҳ�? - ֪�� (zhihu.com)
���綯�Ƶ������������? - ֪�� (zhihu.com)
������FOC������������dz������FOC�㷨��SVPWM���� - ֪�� (zhihu.com)
���SPWM��SVPWM��ԭ�����㷨�Լ����ߵ�����-��Դ�� (dianyuan.com)
��ʶPID-�㶮PID���� - ֪�� (zhihu.com)

