I2C 简介
I2C(Inter Integrated Circuit)总线是 PHILIPS 公司开发的一种半双工、双向二线制同步串行总线。I2C 总线传输数据时只需两根信号线,一根是双向数据线 SDA(serial data),另一根是双向时钟线 SCL(serial clock)。SPI 总线有两根线分别用于主从设备之间接收数据和发送数据,而 I2C 总线只使用一根线进行数据收发。
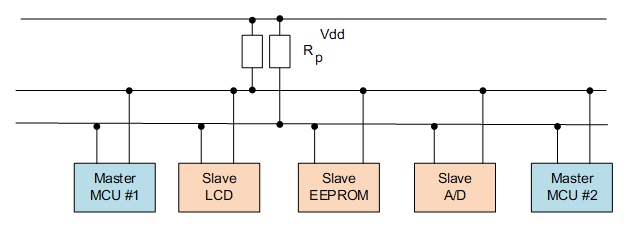
I2C 和 SPI 一样以主从的方式工作,不同于 SPI 一主多从的结构,它允许同时有多个主设备存在,每个连接到总线上的器件都有唯一的地址,主设备启动数据传输并产生时钟信号,从设备被主设备寻址,同一时刻只允许有一个主设备。如下图所示:
如下图所示为 I2C 总线主要的数据传输格式:
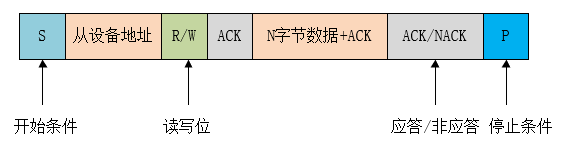
当总线空闲时,SDA 和 SCL 都处于高电平状态,当主机要和某个从机通讯时,会先发送一个开始条件,然后发送从机地址和读写控制位,接下来传输数据(主机发送或者接收数据),数据传输结束时主机会发送停止条件。传输的每个字节为8位,高位在前,低位在后。数据传输过程中的不同名词详解如下所示:
-
开始条件:?SCL 为高电平时,主机将 SDA 拉低,表示数据传输即将开始。
-
从机地址:?主机发送的第一个字节为从机地址,高 7 位为地址,最低位为 R/W 读写控制位,1 表示读操作,0 表示写操作。一般从机地址有 7 位地址模式和 10 位地址模式两种,如果是 10 位地址模式,第一个字节的头 7 位 是 11110XX 的组合,其中最后两位(XX)是 10 位地址的两个最高位,第二个字节为 10 位从机地址的剩下8位,如下图所示:

-
应答信号:?每传输完成一个字节的数据,接收方就需要回复一个 ACK(acknowledge)。写数据时由从机发送 ACK,读数据时由主机发送 ACK。当主机读到最后一个字节数据时,可发送 NACK(Not acknowledge)然后跟停止条件。
-
数据:?从机地址发送完后可能会发送一些指令,依从机而定,然后开始传输数据,由主机或者从机发送,每个数据为 8 位,数据的字节数没有限制。
-
重复开始条件:?在一次通信过程中,主机可能需要和不同的从机传输数据或者需要切换读写操作时,主机可以再发送一个开始条件。
-
停止条件:?在 SDA 为低电平时,主机将 SCL 拉高并保持高电平,然后在将 SDA 拉高,表示传输结束。
-
使用正点原子的潘多拉开发板的例程07_driver_temp_humi进行说明:
在drv_i2c.c文件中使用INIT_BOARD_EXPORT(hw_i2c_init);即RT-Thread中的自动化初始机制,经过层层调用,最终使用rt_device_register()函数将I2C总线注册至I/O设备管理器。函数调用的顺序如下:
hw_i2c_init(【drv_i2c.c】)--->rt_i2c_bit_add_bus(【i2c-bit-ops.c】)--->rt_i2c_bus_device_register(【i2c_core.c】)--->rt_i2c_bus_device_device_init(【i2c_dev.c】)--->rt_device_register(【device.c】)
【drv_i2c.c】:设置I2C总线名称、I2C总线具体操作的引脚、初始化I2C引脚、定义STM32对I2C引脚电平读和写的函数、定义STM32中uS级延时函数、使用hw_i2c_init函数将这些设置的内容传入系统
stm32_i2c_gpio_init
stm32_set_sda
stm32_set_scl_s
stm32_set_scl
stm32_get_sda
stm32_get_scl_s
stm32_get_scl
stm32_udelay
stm32_i2c_bus_unlock
hw_i2c_init
【i2c-bit-ops.c】:通过对drv_i2c.c文件中提供的对引脚电平操作函数的封装实现i2c中的起始信号、终止信号、数据传输等函数,最后调用rt_i2c_bit_add_bus函数将数据传输函数传入i2c_delay
i2c_delay2
SCL_H
i2c_start
i2c_restart
i2c_stop
i2c_waitack
i2c_writeb
i2c_readb
i2c_send_bytes
i2c_send_ack_or_nack
i2c_recv_bytes
i2c_send_address
i2c_bit_send_address4
i2c_bit_xfer
rt_i2c_bit_add_bus
【i2c_core.c】:实现i2c总线设备的注册、查找和数据传输函数rt_i2c_bus_device_register
rt_i2c_bus_device_find
rt_i2c_transfer
rt_i2c_master_send
rt_i2c_master_recv
rt_i2c_core_init
【i2c_dev.c】:实现i2c_bus_device_read、i2c_bus_device_write、i2c_bus_device_control等I2C中的通用控制函数,通过rt_i2c_bus_device_device_init调用rt_device_register函数最终将I2C总线注册到I/O设备管理器中i2c_bus_device_read
i2c_bus_device_write
i2c_bus_device_control
rt_i2c_bus_device_device_init
访问 I2C 总线设备
一般情况下 MCU 的 I2C 器件都是作为主机和从机通讯,在 RT-Thread 中将 I2C 主机虚拟为 I2C总线设备,I2C 从机通过 I2C 设备接口和 I2C 总线通讯,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| rt_device_find() | 根据 I2C 总线设备名称查找设备获取设备句柄 |
| rt_i2c_transfer() | 传输数据 |
查找 I2C 总线设备
在使用 I2C 总线设备前需要根据 I2C 总线设备名称获取设备句柄,进而才可以操作 I2C 总线设备,查找设备函数如下所示,
rt_device_t rt_device_find(const char* name);复制错误复制成功| 参数 | 描述 |
|---|---|
| name | I2C 总线设备名称 |
| 返回 | ―― |
| 设备句柄 | 查找到对应设备将返回相应的设备句柄 |
| RT_NULL | 没有找到相应的设备对象 |
一般情况下,注册到系统的 I2C 设备名称为 i2c0 ,i2c1等,使用示例如下所示:
#define AHT10_I2C_BUS_NAME "i2c1" /* 传感器连接的I2C总线设备名称 */
struct rt_i2c_bus_device *i2c_bus; /* I2C总线设备句柄 */
/* 查找I2C总线设备,获取I2C总线设备句柄 */
i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(name);复制错误复制成功数据传输
获取到 I2C 总线设备句柄就可以使用?rt_i2c_transfer()?进行数据传输。函数原型如下所示:
rt_size_t rt_i2c_transfer(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num);复制错误复制成功| 参数 | 描述 |
|---|---|
| bus | I2C 总线设备句柄 |
| msgs[] | 待传输的消息数组指针 |
| num | 消息数组的元素个数 |
| 返回 | ―― |
| 消息数组的元素个数 | 成功 |
| 错误码 | 失败 |
和 SPI 总线的自定义传输接口一样,I2C 总线的自定义传输接口传输的数据也是以一个消息为单位。参数 msgs[] 指向待传输的消息数组,用户可以自定义每条消息的内容,实现 I2C 总线所支持的 2 种不同的数据传输模式。如果主设备需要发送重复开始条件,则需要发送 2 个消息。
Note
注:此函数会调用 rt_mutex_take(), 不能在中断服务程序里面调用,会导致 assertion 报错。
I2C 消息数据结构原型如下:
struct rt_i2c_msg
{
rt_uint16_t addr; /* 从机地址 */
rt_uint16_t flags; /* 读、写标志等 */
rt_uint16_t len; /* 读写数据字节数 */
rt_uint8_t *buf; /* 读写数据缓冲区指针 */
}复制错误复制成功从机地址 addr:支持 7 位和 10 位二进制地址,需查看不同设备的数据手册 。
Note
注:RT-Thread I2C 设备接口使用的从机地址均不包含读写位,读写位控制需修改标志 flags。
标志 flags 可取值为以下宏定义,根据需要可以与其他宏使用位运算 “|” 组合起来使用。
#define RT_I2C_WR 0x0000 /* 写标志,不可以和读标志进行“|”操作 */
#define RT_I2C_RD (1u << 0) /* 读标志,不可以和写标志进行“|”操作 */
#define RT_I2C_ADDR_10BIT (1u << 2) /* 10 位地址模式 */
#define RT_I2C_NO_START (1u << 4) /* 无开始条件 */
#define RT_I2C_IGNORE_NACK (1u << 5) /* 忽视 NACK */
#define RT_I2C_NO_READ_ACK (1u << 6) /* 读的时候不发送 ACK */
#define RT_I2C_NO_STOP (1u << 7) /* 不发送结束位 */复制错误复制成功使用示例如下所示:
#define AHT10_I2C_BUS_NAME "i2c1" /* 传感器连接的I2C总线设备名称 */
#define AHT10_ADDR 0x38 /* 从机地址 */
struct rt_i2c_bus_device *i2c_bus; /* I2C总线设备句柄 */
/* 查找I2C总线设备,获取I2C总线设备句柄 */
i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(name);
/* 读传感器寄存器数据 */
static rt_err_t read_regs(struct rt_i2c_bus_device *bus, rt_uint8_t len, rt_uint8_t *buf)
{
struct rt_i2c_msg msgs;
msgs.addr = AHT10_ADDR; /* 从机地址 */
msgs.flags = RT_I2C_RD; /* 读标志 */
msgs.buf = buf; /* 读写数据缓冲区指针 */
msgs.len = len; /* 读写数据字节数 */
/* 调用I2C设备接口传输数据 */
if (rt_i2c_transfer(bus, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}复制错误复制成功I2C 从设备数据读写API
以下两个读写函数封装自 rt_i2c_transfer() 函数,用于读写I2C从设备的数据,更加简单易用,推荐使用。
向 I2C 从设备发送数据:
rt_size_t rt_i2c_master_send(struct rt_i2c_bus_device *bus,
rt_uint16_t addr,
rt_uint16_t flags,
const rt_uint8_t *buf,
rt_uint32_t count);复制错误复制成功| 参数 | 描述 |
|---|---|
| bus | I2C 总线设备句柄 |
| addr | I2C 从设备地址 |
| flags | 标志位,可为上文提到的除?RT_I2C_WR?RT_I2C_RD之外的其他标志位,可以进行 “|” 操作 |
| buf | 待数据数据缓冲区 |
| count | 待发送数据大小(单位:字节) |
| 返回 | ―― |
| 消息数组的元素个数 | 成功 |
| 错误码 | 失败 |
从 I2C 从设备读取数据,数据会放在缓冲区中:
rt_size_t rt_i2c_master_recv(struct rt_i2c_bus_device *bus,
rt_uint16_t addr,
rt_uint16_t flags,
rt_uint8_t *buf,
rt_uint32_t count);复制错误复制成功| 参数 | 描述 |
|---|---|
| bus | I2C 总线设备句柄 |
| addr | I2C 从设备地址 |
| flags | 标志位,可为上文提到的除?RT_I2C_WR?RT_I2C_RD之外的其他标志位,可以进行 “|” 操作 |
| buf | 数据缓冲区 |
| count | 缓冲区大小(单位:字节,要大于等于最大接收到的数据长度) |
| 返回 | ―― |
| 消息数组的元素个数 | 成功 |
| 错误码 | 失败 |
小技巧
有时,I2C数据需要通过多次函数拼接而成,通过如下方法,可以实现拼接发送一条I2C数据,数据内容为 prefix_buffer + buffer:
rt_i2c_master_send(_i2c_bus_dev, _addr, RT_I2C_NO_STOP, prefix_buffer, prefix_len); /* 只发送起始位,不发送停止位 */
rt_i2c_master_send(_i2c_bus_dev, _addr, RT_I2C_NO_START, buffer, len); /* 不发送起始位,只发送停止位 */复制错误复制成功I2C 总线设备使用示例
I2C 设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:
-
首先根据 I2C 设备名称查找 I2C 名称,获取设备句柄,然后初始化 aht10 传感器。
-
控制传感器的两个函数为写传感器寄存器 write_reg() 和读传感器寄存器 read_regs(),这两个函数分别调用了 rt_i2c_transfer() 传输数据。读取温湿度信息的函数 read_temp_humi() 则是调用这两个函数完成功能。
/*
* 程序清单:这是一个 I2C 设备使用例程
* 例程导出了 i2c_aht10_sample 命令到控制终端
* 命令调用格式:i2c_aht10_sample i2c1
* 命令解释:命令第二个参数是要使用的I2C总线设备名称,为空则使用默认的I2C总线设备
* 程序功能:通过 I2C 设备读取温湿度传感器 aht10 的温湿度数据并打印
*/
#include <rtthread.h>
#include <rtdevice.h>
#define AHT10_I2C_BUS_NAME "i2c1" /* 传感器连接的I2C总线设备名称 */
#define AHT10_ADDR 0x38 /* 从机地址 */
#define AHT10_CALIBRATION_CMD 0xE1 /* 校准命令 */
#define AHT10_NORMAL_CMD 0xA8 /* 一般命令 */
#define AHT10_GET_DATA 0xAC /* 获取数据命令 */
static struct rt_i2c_bus_device *i2c_bus = RT_NULL; /* I2C总线设备句柄 */
static rt_bool_t initialized = RT_FALSE; /* 传感器初始化状态 */
/* 写传感器寄存器 */
static rt_err_t write_reg(struct rt_i2c_bus_device *bus, rt_uint8_t reg, rt_uint8_t *data)
{
rt_uint8_t buf[3];
struct rt_i2c_msg msgs;
rt_uint32_t buf_size = 1;
buf[0] = reg; //cmd
if (data != RT_NULL)
{
buf[1] = data[0];
buf[2] = data[1];
buf_size = 3;
}
msgs.addr = AHT10_ADDR;
msgs.flags = RT_I2C_WR;
msgs.buf = buf;
msgs.len = buf_size;
/* 调用I2C设备接口传输数据 */
if (rt_i2c_transfer(bus, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}
/* 读传感器寄存器数据 */
static rt_err_t read_regs(struct rt_i2c_bus_device *bus, rt_uint8_t len, rt_uint8_t *buf)
{
struct rt_i2c_msg msgs;
msgs.addr = AHT10_ADDR;
msgs.flags = RT_I2C_RD;
msgs.buf = buf;
msgs.len = len;
/* 调用I2C设备接口传输数据 */
if (rt_i2c_transfer(bus, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}
static void read_temp_humi(float *cur_temp, float *cur_humi)
{
rt_uint8_t temp[6];
write_reg(i2c_bus, AHT10_GET_DATA, RT_NULL); /* 发送命令 */
rt_thread_mdelay(400);
read_regs(i2c_bus, 6, temp); /* 获取传感器数据 */
/* 湿度数据转换 */
*cur_humi = (temp[1] << 12 | temp[2] << 4 | (temp[3] & 0xf0) >> 4) * 100.0 / (1 << 20);
/* 温度数据转换 */
*cur_temp = ((temp[3] & 0xf) << 16 | temp[4] << 8 | temp[5]) * 200.0 / (1 << 20) - 50;
}
static void aht10_init(const char *name)
{
rt_uint8_t temp[2] = {0, 0};
/* 查找I2C总线设备,获取I2C总线设备句柄 */
i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(name);
if (i2c_bus == RT_NULL)
{
rt_kprintf("can't find %s device!\n", name);
}
else
{
write_reg(i2c_bus, AHT10_NORMAL_CMD, temp);
rt_thread_mdelay(400);
temp[0] = 0x08;
temp[1] = 0x00;
write_reg(i2c_bus, AHT10_CALIBRATION_CMD, temp);
rt_thread_mdelay(400);
initialized = RT_TRUE;
}
}
static void i2c_aht10_sample(int argc, char *argv[])
{
float humidity, temperature;
char name[RT_NAME_MAX];
humidity = 0.0;
temperature = 0.0;
if (argc == 2)
{
rt_strncpy(name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(name, AHT10_I2C_BUS_NAME, RT_NAME_MAX);
}
if (!initialized)
{
/* 传感器初始化 */
aht10_init(name);
}
if (initialized)
{
/* 读取温湿度数据 */
read_temp_humi(&temperature, &humidity);
rt_kprintf("read aht10 sensor humidity : %d.%d %%\n", (int)humidity, (int)(humidity * 10) % 10);
if( temperature >= 0 )
{
rt_kprintf("read aht10 sensor temperature: %d.%d°C\n", (int)temperature, (int)(temperature * 10) % 10);
}
else
{
rt_kprintf("read aht10 sensor temperature: %d.%d°C\n", (int)temperature, (int)(-temperature * 10) % 10);
}
}
else
{
rt_kprintf("initialize sensor failed!\n");
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(i2c_aht10_sample, i2c aht10 sample);
