дкбЇЯАЧЖШыЪНВйзїЯЕЭГжЎЧА,ЮвзЂвтЕНСЫетИіФмЙЛЪЕЯжЧсСПЯпГЬЛЗОГЕФКЏЪ§Пт(ЛђепПЩвдЫЕЪЧзюзюМђЕЅЕФВйзїЯЕЭГ),гкЪЧЯыЖЏЪжГЂЪдФмВЛФмдкSTM32ЙЄГЬжаЧГгУвЛЯТЁЃ
вЛЁЂНЋProtothreadsМгШыkeil5ЙЄГЬ
1.НЋProtothreadsжБНгИДжЦНјЙЄГЬЮФМўжа(дДТыЯТдиСДНгProtothreads - download);
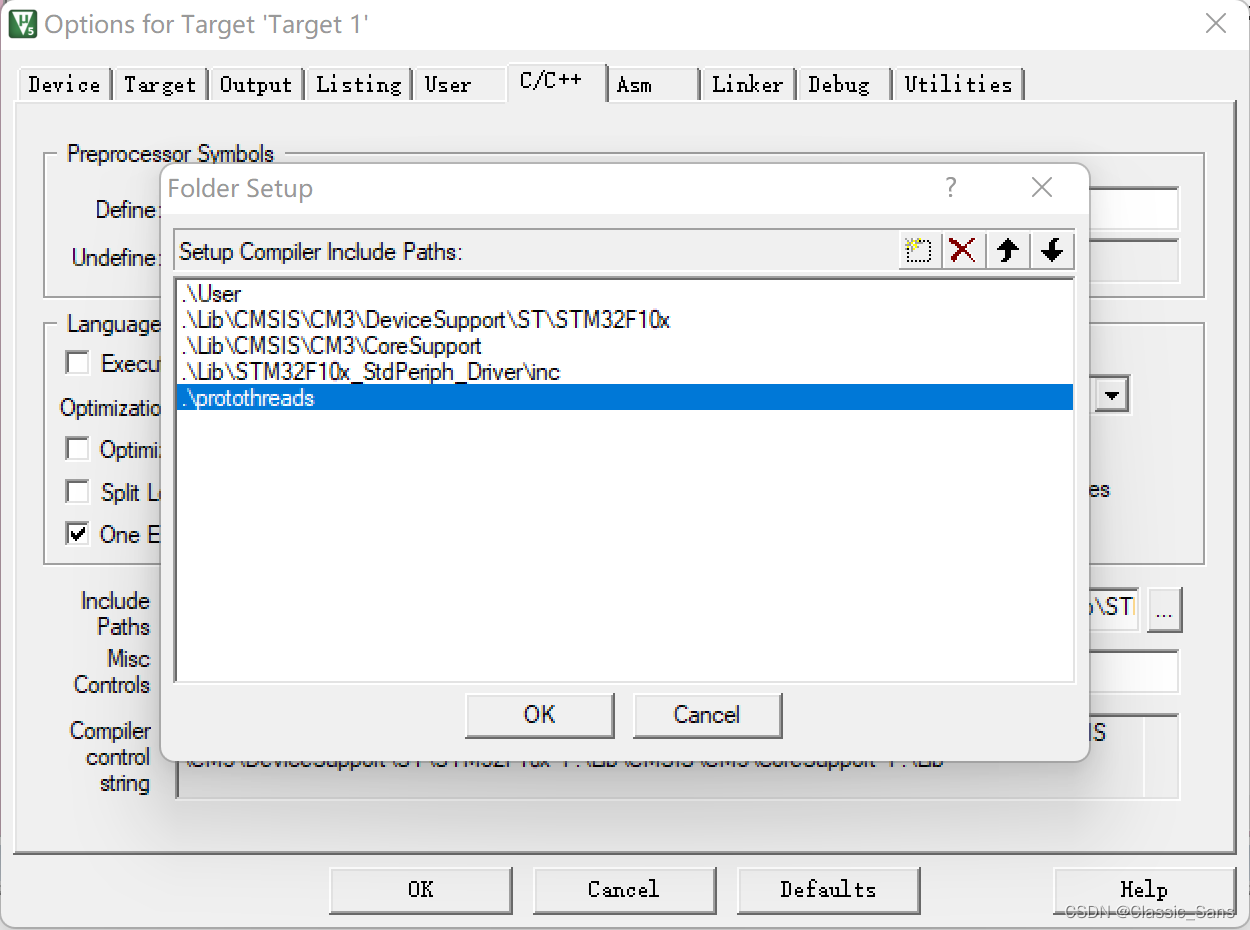
2.гЩгк ProtothreadsШЋВПгЩЭЗЮФМўЙЙГЩ,дкKeilЙЄГЬЩшжУжажБНгincludeМДПЩЁЃ
ЖўЁЂЪЙгУProtothreadsБраДДњТы
1.ЗТееMalcБраДвЛИіГЬађ:LED1У№вЛУыССвЛУы,ЭЌЪБLED2У№ЮхУыССЮхУыЁЃДњТыШчЯТ:
#include <stm32f10x.h>
#include "Led_Key.h"
#include "bsp_exti.h"
#include "bsp_SysTick.h"
#include "bsp_iwdg.h"
#include "bsp_wwdg.h"
#include "bsp_uart.h"
#include "bsp_dma.h"
#include "bsp_adc.h"
#include "bsp_tim2.h"
#include "bsp_rtc.h"
#include <pt.h>//ProtothreadsЭЗЮФМў,БиаыАќРЈ
static int counter1,counter2;
static int protothread1(struct pt *pt)
{
PT_BEGIN(pt);//ЯпГЬПЊЪМ
while(1)
{
PT_WAIT_UNTIL(pt, counter1 == 1);//ШчЙћЪБМфТњ1УыМЬајжДаа,ЗёдђМЧТМдЫааЕуВЂЭЫГіЯпГЬ1
GPIOA->ODR ^= GPIO_Pin_1;//ЕЦ1зДЬЌЗДзЊ
counter1 = 0;
}
PT_END(pt);//ЯпГЬНсЪј
}
static int protothread2(struct pt *pt)
{
PT_BEGIN(pt);//ЯпГЬПЊЪМ
while(1)
{
PT_WAIT_UNTIL(pt, counter2 == 5);//ШчЙћЪБМфТњ5УыМЬајжДаа,ЗёдђМЧТМдЫааЕуВЂЭЫГіЯпГЬ2
GPIOA->ODR ^= GPIO_Pin_2;//ЕЦ2зДЬЌЗДзЊ
counter2 = 0;
}
PT_END(pt);//ЯпГЬНсЪј
}
static struct pt pt1, pt2;
int main(void)
{
PT_INIT(&pt1);//ЯпГЬ1ГѕЪМЛЏ
PT_INIT(&pt2);//ЯпГЬ2ГѕЪМЛЏ
SysTick_Configuration();
Led_Configuration();
while(1)
{
protothread1(&pt1);//жДааЯпГЬ1
protothread2(&pt2);//жДааЯпГЬ2
Delay_us(1000000);
counter1++;
counter2++;
}
}?2.БрвыKeil5,ДЫЪБЬсЪОUser\main.c(18): warning: ?#550-D: variable "PT_YIELD_FLAG" was set but never used,ВЛгУЙм,ЩеТМНјstm32,ЙлВьЯжЯѓЁЃ
?Ш§ЁЂProtothreadsНјНзЁЊЁЊаХКХСП
zqnchnНВНтСЫаХКХСПЕФИХФю,МДЁАЕУЕНСЫвЛИіаХКХСП,ШЮЮёМЬајдЫаа,ЕУВЛЕН,вЛБпДєзХШЅЁБЁЃ
вЊЧѓ:АхдиLEDвд2УывЛжмЦкЕФЫйТЪТ§ЫйЩСЫИЁЃЕБЧвНіЕБДЎПкЗЂРД0xaaЪБ,ПьЩС5ДЮЁЃ
1.НЋprotothreadsЮФМўМаЯТЕФЮФМўЬцЛЛЮЊzqnchnеыЖдArduinoгХЛЏКѓЕФProtothreadsАцБО(ЕижЗ:https://toscode.gitee.com/changser/changser_pt_for_arduino);
2.аоИФpt-timer.hжаЙигкPT_TIMER_DELAYЕФКъЖЈвх,ДЫДІБЪепВЩгУrtcМЦЪБЦїМЧТМЪБМф(ИУЮФМўЦфЫћКъЖЈвхЭЌбљПЩвдаоИФ);
#define PT_TIMER_DELAY(pt,time) \
do { \
(pt)->t = millis(); \
PT_WAIT_UNTIL((pt),((pt_timer)(millis()-(pt)->t)>=(time)));\
}while(0)аоИФЧА?
#define PT_TIMER_DELAY(pt,time) \
do { \
(pt)->t = RTC_GetCounter(); \
PT_WAIT_UNTIL((pt),((pt_timer)(RTC_GetCounter()-(pt)->t)>=(time)));\
}while(0)аоИФКѓ
?3.аоИФrtcЪБжгХфжУ(ИФЮЊrtcУПе№ЕДвЛДЮОЙ§вЛКСУы),ВЂБраДжаЖЯДІРэКЏЪ§;
int RTC_Configuration_ms(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP | RCC_APB1Periph_PWR, ENABLE);
PWR_BackupAccessCmd(ENABLE);
if(BKP_ReadBackupRegister(BKP_DR1) != 0x1234)
{
BKP_DeInit();
RCC_LSEConfig(RCC_LSE_ON);
while(RCC_GetFlagStatus(RCC_FLAG_LSERDY)!=SET)
{
}
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForLastTask();
RTC_WaitForSynchro();
RTC_SetPrescaler(32);//(32 + 1) / 32768 Ёж 0.001(s)
RTC_WaitForLastTask();
BKP_WriteBackupRegister(BKP_DR1, 0x1234);
return 0;
}
return 1;
}void USART1_IRQHandler(void)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == SET)
{
rdata = USART_ReceiveData(USART1);//ДЫДІrdataЮЊШЋОжБфСП,вдБуБЛmain.cЪЙгУ
}
}4.ЪЙгУProtothreadsБраДmain.cЮФМў,ЭЈЙ§аХКХСПЪЕЯжвЊЧѓ;
#include <stm32f10x.h>
#include "Led_Key.h"
#include "bsp_exti.h"
#include "bsp_SysTick.h"
#include "bsp_iwdg.h"
#include "bsp_wwdg.h"
#include "bsp_uart.h"
#include "bsp_dma.h"
#include "bsp_adc.h"
#include "bsp_tim2.h"
#include "bsp_rtc.h"
#define PT_USE_TIMER//ЖЈЪБЦїПт
#define PT_USE_SEM//аХКХСППт
#include <pt.h>
static struct pt_sem sem_LED;
unsigned char i;
static int protothread1(struct pt *pt)
{
PT_BEGIN(pt);//ЯпГЬПЊЪМ
while(1)
{
PT_SEM_WAIT(pt, &sem_LED); //ЕШД§LEDаХКХСППЩгУ
GPIOA->ODR ^= GPIO_Pin_1;//ЕЦ1зДЬЌЗДзЊ
PT_TIMER_DELAY(pt, 1000);//СєвЛУы
PT_SEM_SIGNAL(pt, &sem_LED);//аХКХСПгУЭъСЫ
PT_YIELD(pt);//ШУИјЦфЫћЯпГЬ(ДЫДІКмживЊ,ЗёдђЛсПЈдкwhileбЛЗРяГіВЛРД)
}
PT_END(pt);//ЯпГЬНсЪј
}
static int protothread2(struct pt *pt)
{
PT_BEGIN(pt);//ЯпГЬПЊЪМ
while(1)
{
PT_WAIT_UNTIL(pt, rdata == 0xaa);
PT_SEM_WAIT(pt, &sem_LED);//ЕШД§LEDаХКХСППЩгУ
for(i = 0; i < 5; i++)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_1, Bit_RESET);
PT_TIMER_DELAY(pt, 200);//Сє0.2Уы
GPIO_WriteBit(GPIOA, GPIO_Pin_1, Bit_SET);
PT_TIMER_DELAY(pt, 200);//Сє0.2Уы
}
rdata = 0;//ЗРжЙдйДЮwhile
PT_SEM_SIGNAL(pt, &sem_LED); //аХКХСПгУЭъСЫ
}
PT_END(pt);//ЯпГЬНсЪј
}
static struct pt pt1, pt2;
int main(void)
{
PT_INIT(&pt1);
PT_INIT(&pt2);
PT_SEM_INIT(&sem_LED,1); //ГѕЪМЛЏаХКХСПЮЊ1,МДУЛШЫгУ
SysTick_Configuration();
Led_Configuration();
Uart1_Configuration();
Uart1_NVIC_Init();
RTC_Configuration_ms();//ХфжУRTCЪБжг,зїЮЊЖЈЪБЦїПтЕФвРЭа
while(1)
{
protothread1(&pt1);
protothread2(&pt2);
}
}?5.БрвыKeil5,ЩеТМНјstm32,ЙлВьЯжЯѓЁЃ
ПЩвдПДЕН, МДЪЙдкТ§ЫйЩСЫИ(ЯпГЬ1)ЕФЙ§ГЬжа,жЛвЊНгЪеЕНДЎПкЗЂРДЕФ0xaa,СЂТэзЊЛЛЮЊПьЩС(ЯпГЬ2),ПьЩСЮхДЮКѓЛиЕНТ§ЩС(ЯпГЬ1),ЪЕЯжСЫЖрЯпГЬДІРэЁЃ
ЫФЁЂзмНс
ProtothreadsвбОФмЮЊГЬађЩшМЦЬсЙЉЧсСПЯпГЬЛЗОГ,НтОіТуЛњЯЕЭГЮоЗЈДІРэЕФЖрЯпГЬЮЪЬтЁЃКѓајБЪепНЋГЂЪдНгДЅuC/OS III,е§ЪНбЇЯАЧЖШыЪНВйзїЯЕЭГЁЃ
ВЮПМЮФеТ:
1.ArduinoНЬГЬ ProtoThreadsдкArduinoжаЕФгІгУ#ЖрШЮЮёДІРэ#
2.ЭцЖљДѓСЫ~ИјarduinoЩЯВйзїЯЕЭГСЫ~!
?ПЊЗЂАхРДдД:ЧЖШыЪНММЪѕЙЋПЊПЮ