目录
定时器函数执行周期跟定时时间不一致?
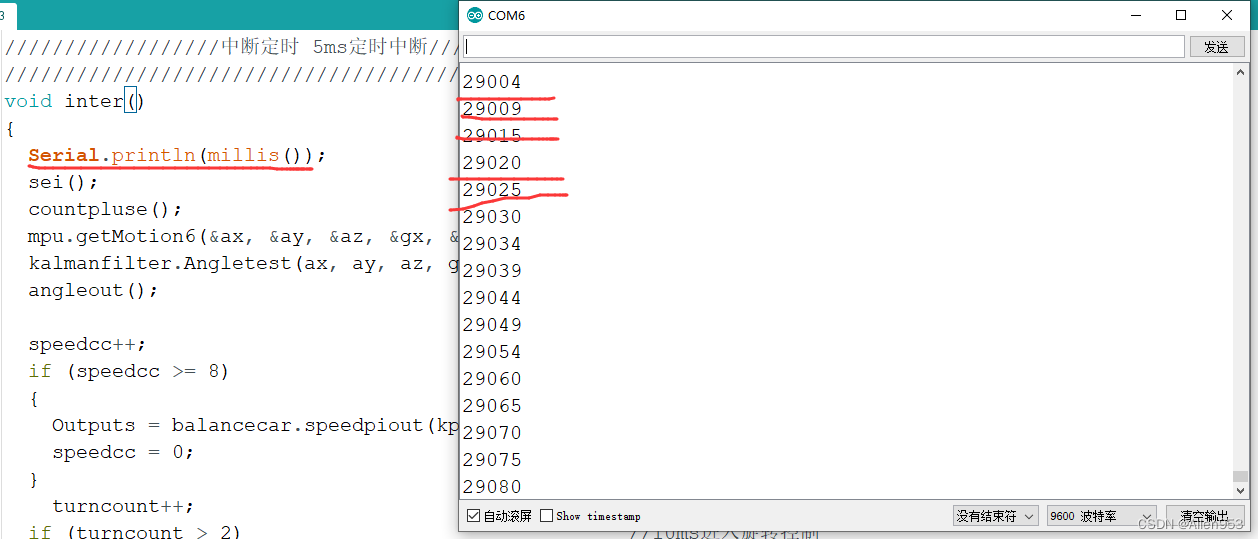
定时器中断给的是5ms的中断时间,如下图:?

结果在每个中断函数执行开始的程序里加上打印时间戳的语句,发现中断函数执行两次之间的时间差在50ms左右,这很明显使得平衡小车无法工作,但是是 什么原因呢?
 ?是因为算力比较弱,所以进行计算的时候占用了时间吗?把源程序也上传上去(计算量一样),看看源程序是不是也是这样?
?是因为算力比较弱,所以进行计算的时候占用了时间吗?把源程序也上传上去(计算量一样),看看源程序是不是也是这样?
可以看到,源程序一样的计算量,但是人家中断函数是严格5ms执行一次的,也就是说不是算力的原因。?
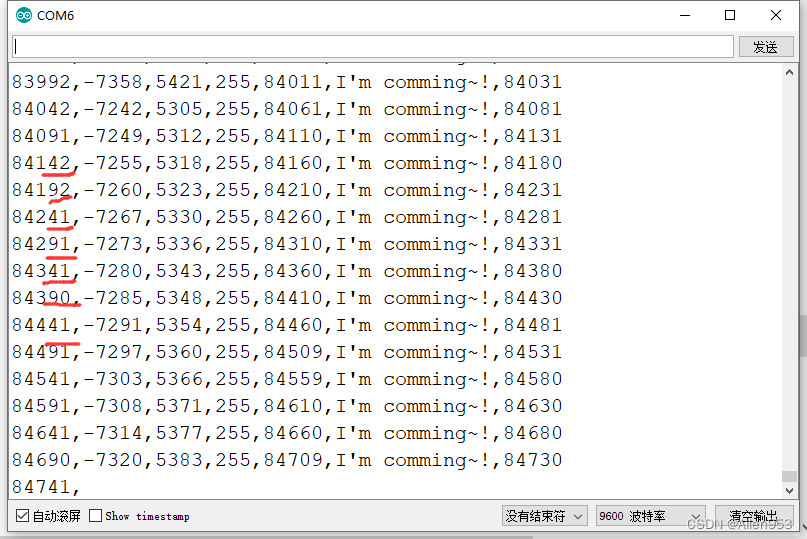
?接着做实验,在源程序里面,中断函数的起始和结束都打印时间,然后发现周期就不正常了。
中断函数两次执行之间隔了9秒左右,程序头和末尾之间隔了2-4ms不等。这是什么情况呢?
难道串口输出对中断函数有影响吗?
?然后,再把中断函数末尾的时间打印给删掉,又一切正常了。
?怀疑:要么是串口打印函数影响了中断函数执行周期,要么是原本中断函数执行周期虽然是5ms,但是中断函数可能没执行到底,这个假设应该不成立,因为如果没执行到底,那么电机驱动函数就不会执行,小车就会跌倒?是这样吗?也不一定,因为这次的没执行到底,那么上次的pwm也可以用。先做实验看看吧。

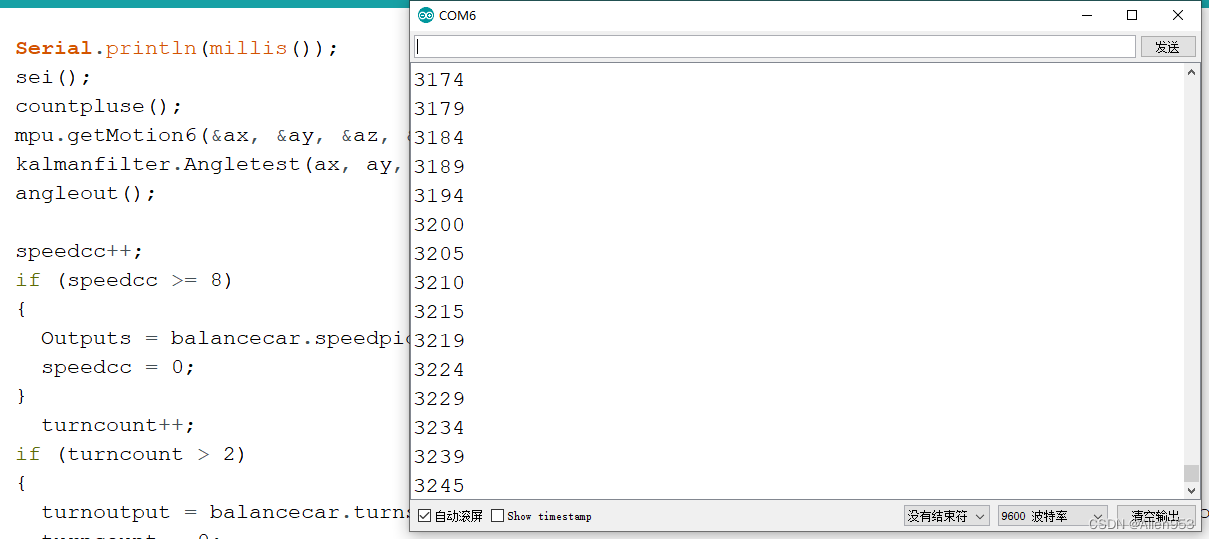
然后,我又这样做了个实验,发现没有中断函数的时候,只是在loop函数里面打印时间戳,也是非常耗时的,周期在25ms左右。不知道时间都用在了哪里?
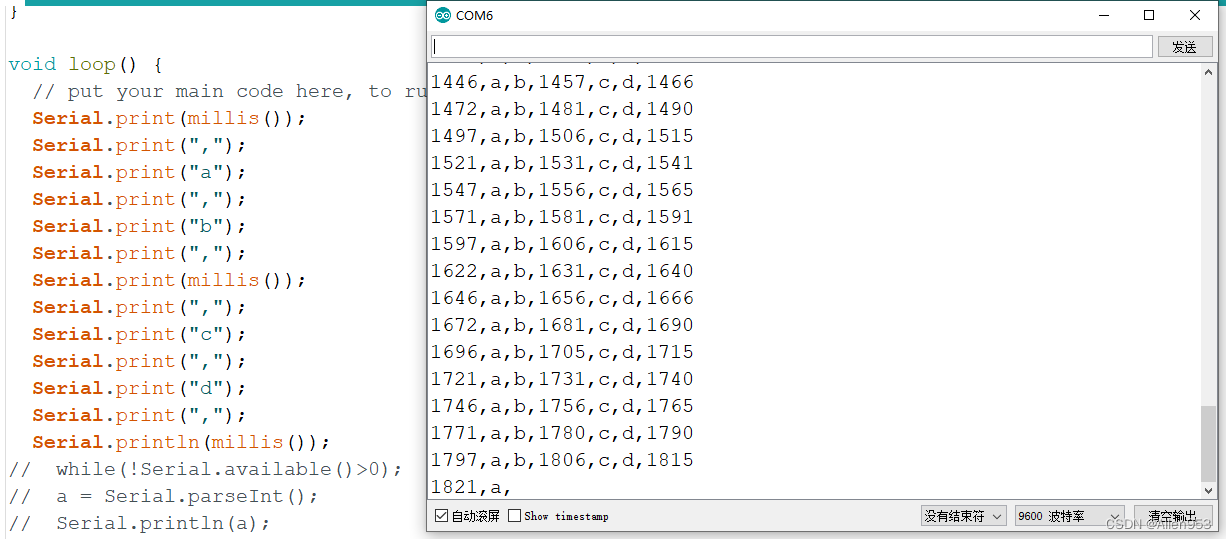
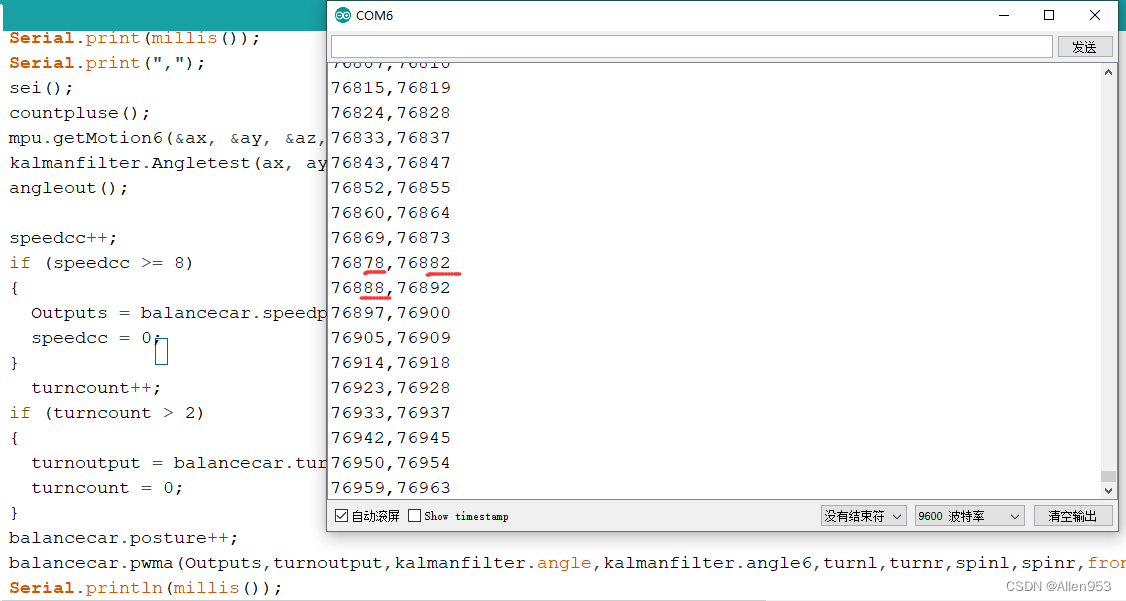
?少打印一个时间戳,多打印一个字符,这样再看一下,周期是25ms左右,周期基本没变化。

怀疑是串口波特率太低,所以影响程序比较慢,所以我把波特率从9600调整到115200,然后再看这个程序,周期变成了2ms,就非常快了。那么也就证明了,如果波特率太低,就会严重影响程序运行速度,那么具体是如何影响的呢?

drv8833这款驱动器可以制作平衡小车用吗?
我买的平衡小车是用的tb6612fng这款直流电机驱动器,但是我自己做的小车驱动器是drv8833.
他们之间价格相差有十倍之多,TB6612fng这款驱动器售价现在在三十多块钱,而drv8833只有3块钱就能买到。
我买的平衡小车,我是想把他的驱动器从TB6612fng换成drv8833,然后看平衡小车是否还能正常工作,如果是依然可以正常工作,那么就说明这个驱动器是没问题的,可以用于制作平衡小车。如果不行的话,可能就是说drv8833这个驱动器的性能不行,制作平衡小车可能有些问题。
原先的引脚表
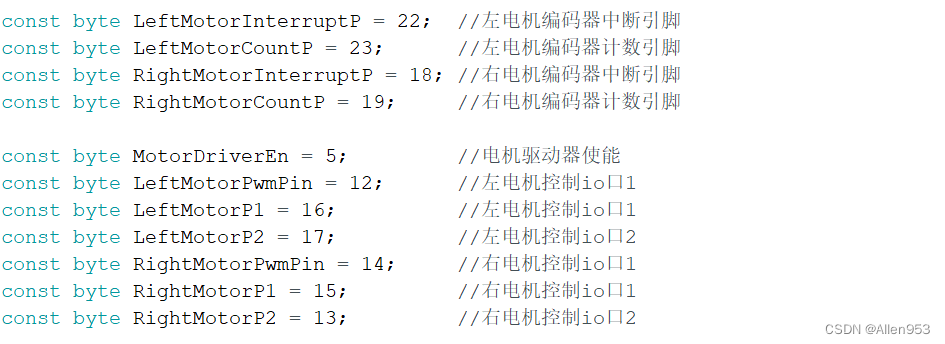
?现在的引脚表
电机编码器AB相无输出?
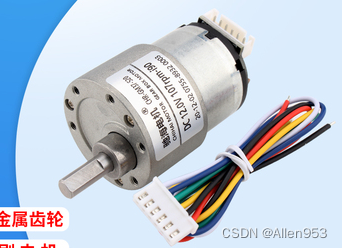
在淘宝上购买的这种电机,有时候会遇到编码器的AB相没有电平变化的情况,这个时候一般是电机编码器只支持5V电源供电,但是我们提供的电源电压是3V。所以编码器没有正常工作。?
平衡小车的角度标定一定要准确
平衡小车的角度标定一定要标定准确,否则调PID怎么也调不好的。
比如说平衡小车的平衡点是传感器角度为-1.5度,那么我们如果不进行标定,直接把0度作为小车的平衡点,这个就是不合适的,这样单纯调pid也是调不好的。因为平衡点是我们控制的期望值,如果期望不对,那么肯定达不到控制效果。
平衡小车前进后退的控制逻辑是什么?
通过阅读代码,我们可以看到,小车的前进和后退,是直接在小车速度环的积分上加或者减一个数来实现的。?从而改变了平衡小车的位置,达到前进和后退的效果。那么速度环的积分项就不为0,岂不是说速度环一直都有一个输出?

我们加上或者减去的这个数字,?其实是位置的一个期望,通过增加一个位置的期望,使得速度环有了输出,但是小车的速度环期望是0,所以为了使得速度环调整为0,所以小车运动越来越慢,运动过程中,速度的积分刚好与一开始我们加的积分相抵消,绝对值慢慢减小为0,使得小车的速度为0,但位置趋于我们的期望。
也就是说小车速度的期望是0,为了使小车速度为0,所以,小车继续运动,在运动过程中,小车速度的积分刚好跟我们输入的这个速度积分期望即位置抵消了。