����������һ������͵ķ���ϵͳ
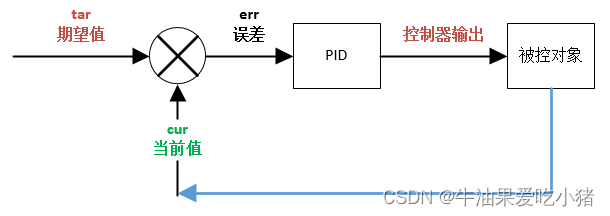
�Dz��Ƿdz���Ϥ,����������������������������ǵ���������,����ٵĸı�������������ϸ��,˵����,����㷨Ҳ����һ����ѧ��ʽ,�����������,�����Ҳ������,����ô���ܸı���������?
������������������������?
������������,�������ֲ�Ӧ��,Ҳ���ܹ�ֱ�Ӹı�������,�����ܸı�����������ִ������
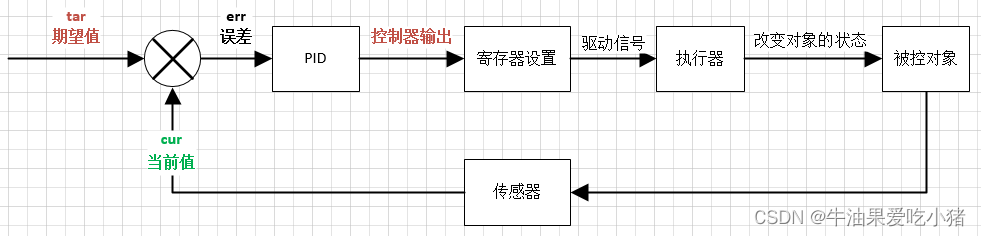
���Ը���ʵ�Ŀ���ͼӦ���������ġ�
����Ӧ�ø�л���ڵ�ִ���������㹻��,����ͨ�������Լ���������,����ֻ��Ҫͨ�����һЩ�ĵ�ƽ�ź�,�������ͻ�������ǿ���ִ������
���͵�ִ�������ǵ��,�����������,������,ͨ��������PWM�źžͿ��Կ��ơ�
���������õ��㷨,���ն���д��һ����Ƭ�����,�����ϸ���˵����ʹ�õ�������PID�㷨,�㷨������ȷֻ�����һЩ����,���ǵ�Ƭ�����ڲ�����ƽ�ź�,ȴ�Ƿdz��ó�,������һ�¼Ĵ���,ֻ��Ҫһ�����־Ϳ��Բ�������Ҫ��PWM�ź��ˡ�
����������������?
�������������PID��������ʲô��?Ϊʲô����ֱ���������Ϊ���,����PWM��?
���˼·��ʵ����ֻ�����������PWM,Ҳ�������õ�ǰ�����(����),Ҳ����PID�㷨�е�P,�������������,�����ǰ�������ܴ�,������Ȼ��ϣ��ִ������������ֵ������С�����
��������������Ϣ���ǿ�����,�����ȥ�����(����),��������ȥ���ǵ����һֱ�ܴ�,�Dz��Ǵ�������һֱ��������Ŀ���Զ�ĵط�,�������������ʱ��Ҳ���Կ�����һ�㡣
�������ǻ������ý��������(��),������ĸı�Խ��Խ��,�����������ڼ��ٱ仯,���п��ܵ�������,��������λ��,��������ҲҪ�ѽ��������ǽ�ȥ��
������PID������ȫ����Ϣ�ļ�Ȩ��ϡ�,���ۺϿ��������������и�����й�����Ϣ,�����������ܸ����������������,����,�����������Ȼ���Ǹ���,���ο������Ǹ�����,�������������Ǹ��������仯������,û��ʵ�ʵ��������塣
��̴��������ݵij�����������:
ͨ����ᷢ��,����ѿ�����������Ƴ�[-1,1]����[0,1],��ʵ��ֻ�Ǹ����̼���,��Ϊ�˷���ӳ���PWM��ռ�ձ�(0~100%)��
�ڵ�Ƭ��������Ҫ���ij���̶�Ƶ�ʵ�PWM,ʹ����ռ�ձȴ�0��100�仯,������������ò�ͬ,Ҫ�������Ч��,����Ҫ�ļĴ�������Ҳ����Ҫ��1000��2000��
������PID�����������[-1,1],����ͨ����ӳ��Ϳ��Ա仯��[1000,2000],�����ζ�����PID����ֻ��Ҫѡ����ʵIJ�����PID������������仯��[-1,1]֮��仯���ɡ�
�෴����㽫�������ֱ�Ӷ�Ӧ���Ĵ�������,������Ҫ��Ե�PID������,����Ҫ���ڲ���,����ʹPID����������仯��[1000,2000]֮��仯��
�����㿴���Ĵ�����ʵ���ǹ��̼���,��Ϊ�������ܸ��õ����⡣
������������������������?

��������˵PID�����������һ������,û����������,������������?
����������һ���dz����������Ŀ��ƿ�ͼ��ͨ����ҽ��ܵ�����,������Ƽ��ٶ�,������Ҫ�������ٶ�,ͨ�������ִ�����ı���ٶȡ�
��������������������Ǽ��ٶ�һ����
�����������?
�����ǰ�����ͼ���»�һ�¡�
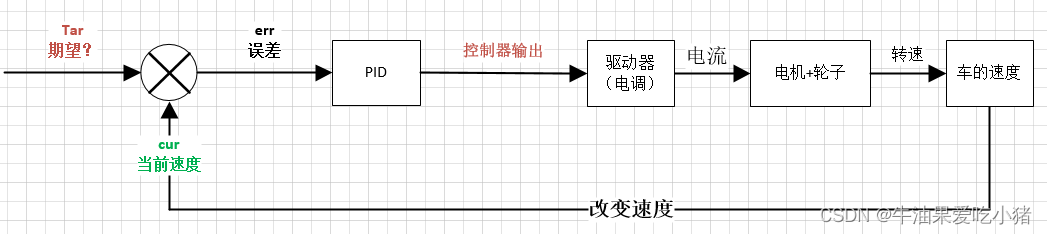
�����������Ӧ���Ǽ��ٶ���?
��Ȼ����������������������Ӧ�����ٶ�,����е������,�������ƽṹû���κα仯,��ô����˵��ͱ���?
������Ϊ�����Ҫ���Ƶ���������ı���,��������ֵ��������Ҳ�仯�ˡ�
���ن���һ��,����Ȼ���˻���������С�����ٶȲ���ͬһ����������,һ�����ٶ�,һ���ٶ�,�������˻��������������ٶȲ������ȹ�ϵ;
���˵��,������ֵ��ʲô,�������û�й�ϵ��,���������������йء���ֱ�ӵ�ԭ������Ϊ��ʹ�������������������ֵ,����ֵ��Ҫ�뷴��ֵ����,��������ֵ�������������塣����**������ֵ��ʲôȡ���ڷ���ֵ��ʲô����**
����ͼ�е�����ֵ��������3��
����Ҳ��������ҵķ�����ʲô������,����֪��һ��3����ʲô����������?��û���κ�����,��������3���ѡ�
һ���Ҹ�����ͼ�з������Ǽ��ٶ�,��ʱ�����֪��,3���������ҵ��������ٶ�,���������,��λ��ûȷ��,��ʱ�����ٸ������ҷ����ļ��ٵ�λ��cm/s/s,��ʱ�������IJž�������������������,�����ҵ�������3cm/s/s��
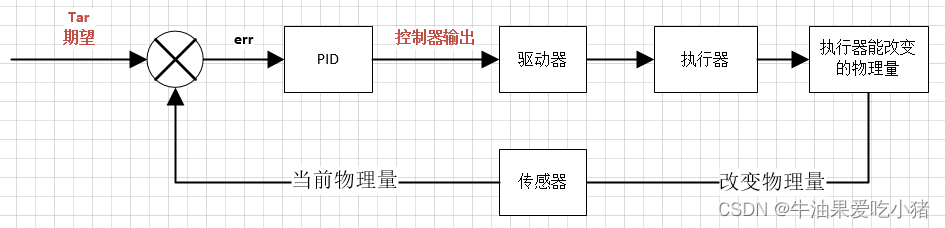
�������������������������ԭ������Ϊ�㷴����һ��������,��������ΪPID�㷨��
����������:
1.�ҵ�ִ�����ܸı���ٶ����������,
2.�ҰѼ��ٶ���Ϊ����,�����������
3.�趨����ֵ,���ֵ������������Ҫ�뷴��һ�¡�
����,�������ֵ��ʲô��ʵ��ȫȡ������ķ���ֵ,�������������ֵ,������ֵ����һ������,����һ�����߶��ѡ�
ΪʲôҪ�ô���PID��
����ȥPID�����Ѿ�����������?ֻҪ���ܸ�������,�Ҿ��ܿ������Ե�������������?
Ϊʲô��Ҫ˫�ջ�PID��?��Ϊʲô˵��������ڻ�������?Ϊʲôλ������PID�ͱ���ٶ���������?
��������һ�����Щ���⡣

�о�����ûʲô����,���Ǹ�֮ǰ��Щ����һ��,֮ǰ���ǵ�**��ִ������ֱ�Ӹı䷴��ֵ��**,�����������������,ִ������Ȼֻ�ܸı�����,ֻ����,��Ϊ�����ı�,���м��ٶ�,�Ӷ������ٶȱ仯,���յ���λ�ñ仯��
����㰴��ͼ�е�˼·��ƿ�����,�Ǿ�˵��**����ֻ��λ����������**,����ζ���������,�ٶ�û������,Ҳ����ζ�ż��ٶ�,�ٶ���ʲô������ν��
����ʵ��Ч�����ʲô��?�������һ��������ν�ļ��ٶ�,���ٶ�,�����������λ�á���
��ʱ����ֵ����鷢����,�����������λ��ʱ�м��ٶȺ��ٶ�,������Ͳ���**����������λ�á���,�������������λ�á�**����ᷢ����Ķ���������λ�ø���������������,������,���˻�ȥ,�˹���,�ֳ���ȥ��
��ʱ�����������,ԭ��**������������ͣ������λ���ϡ�����ʲô��ͣ������λ����?���ǵ�������λ�õ�ͬʱ���ٶ����ٶȶ�Ϊ0����**
�����������β�����,Ϊʲô֮ǰû��������⡣
֮ǰ�ڵ���PIDʱ���Ǿٵ�������,���������Ƶ�������,���ǿ���ֱ�ӱ�ִ�����ı�ġ�
���������������,�����������Ƶ�������,���ܱ�ִ����ֱ�Ӹı�,���ǿ��Ա���Ӹı�,������֪����Ӹı�Ĺ��̡���
֮ǰ���������λ��,�����ڿ��ƻ�����,��������,��ֱ���ߵ���Ӧ��λ�á�(���Ƶ����ٶȡ�)
�������������λ��,�����ڿ���һ̨�й��Եij�,��ֻ�ܲ����ż���,����ɲ�����м���,��ֻ��ͨ���ٶȿ��Ƽ�ӿ���λ�á�(���Ƶ��Ǽ��ٶȡ�)
������϶�֪��,������Ҳ�ǿ��Կ���λ�õ�,���ǵü�У��ĵ��������?���������㾫�Ŀ���λ����?
������ʱ������ô����λ�õ���?����ͣ��ָ��λ�õ�ʱ��,������һ�����ٶ�ǰ��ָ��λ��,�쵽��ʱ��,ͨ��ɲ�����ϼ���,ֱ���ٶ�Ϊ0,ͣ��������λ�á�
������̸���������ʲô?����ֻͨ�������ٶȾͿ��Լ�ӿ���λ��,Ҳ����˵**�����ǿ���ͨ������ij���������ı仯����,�Ӷ���ӿ����������������**
��������ֻ��Ҫѡ��**�����ʵ��ٶȱ仯���ߡ�**�Ϳ���ͣ��������Ҫ��λ�á������ǾͿ��ѿ��������ó�����Ľṹ��(���˻��漰��������ӿ����ٶ�,����һЩ,���������üĵ��-С��ģ��)

ʲô��**�����ʵ��ٶȱ仯���ߡ�**��,
���ȵ���������λ�õ�ʱ��,�ٶ�Ӧ��Ϊ0��
��ε�û�е�������λ�õ�ʱ��,�����ٶ��ǿ��Լ�Сλ�����ġ�
���ܽ�һ������Ҫ��:
�������ٶȱ����ܼ�Сλ�����,��λ�����Ϊ0ʱ,�����ٶ�Ϊ0����
ʲô��˼��?���ǰ��Ϊ������,������λ��������ǰ��ʱ,��target-current>0,�����Ǿ�ϣ�����и���ǰ�����ٶ�,ȥ��С������,�����Ϊ0ʱ,����ϣ���ٶ�Ϊ0�����������Ĺ��̵��ٶȱ仯����,����**�����ʵ��ٶȱ仯���ߡ�**��
���뿪����ʱ��,�쵽�յ��ʱ������ʲô����?
������û��λ�õ�ʱ��,ϣ����һ���ȽϿ���ٶ�,�쵽��ֱ��һ��ɲ���ȵ��ס�
���ֿ�����ǰԤ��,���ٽ����ٶȡ�
���߽Ŀ��Ա仯�ļ����������ٶȱ仯��˿��˳����
��������������ߡ�
(��һ��������ʵ��������������,��Ϊ�ٶȼ�С��Ҫ����,����ͻ��)
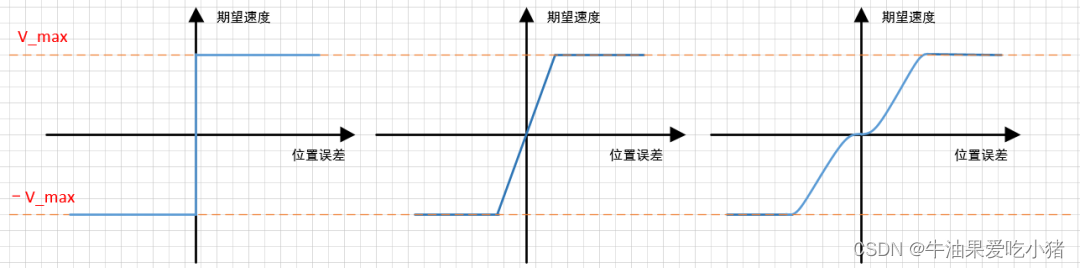
��Ϊ���Ƕ������ٶȵ�Ҫ��**�������ٶȱ����ܼ�Сλ�����,��λ�����Ϊ0ʱ,�����ٶ�Ϊ0��**���������Ƿ�����Щ�����ٶȶ��ǡ�**��λ�������ص��Ҿ���0������ߡ�**��
λ������������ٶ�����ʱ��Ž�����Ĺ�ϵ,ע��,ǿ��һ��,������������λ������������ٶ���ϵ������,����������ϣ�������ٶȴﵽ����λ�õ�Ч����
�����ֿ����ܹ���ʵ�ֵı�����,���ٶ���λ�ô���������֪�ļ仯��ϵ,���ٶȵĻ�����λ�á�,���Ըı������ٶȲ��ܸı�λ��,���ܼ�С��

���Ժ����Ŀ��ƹ���Ӧ�þͿ�����Ƴ�������
ֻҪ�Ҹ����ʵĺ���,����������ɺ��ʵ������ٶ����߾Ϳ����ˡ�
�����ʹ�õ���ʲô����������?
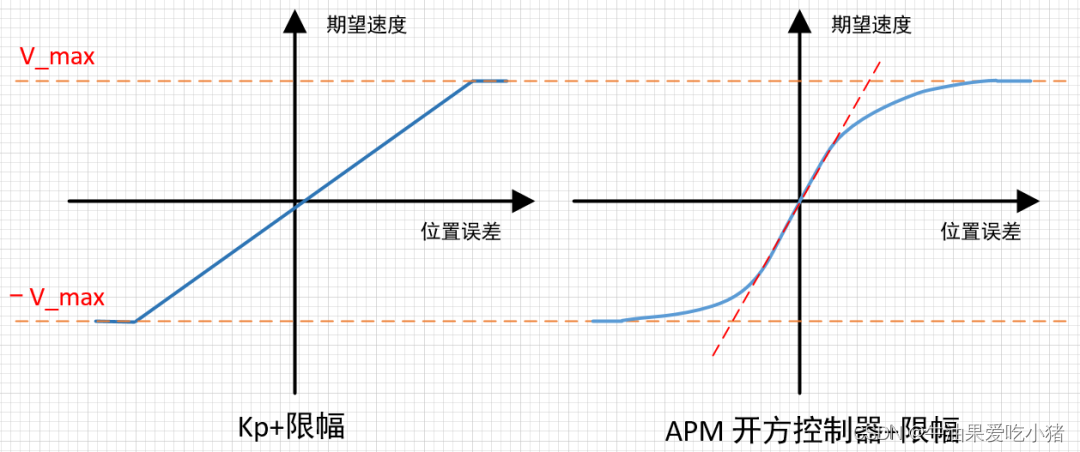
�Dz��Ƿdz���Ϥ��
��Ϊ��������������**�����ʵ������ٶȡ�**��Ҫ��,ͬʱҲ�dz��ļ�

ֻҪ������**�����ʵ������ٶȡ�**�����߶�������Ϊ�����ٶ�,��Ȼ������ʹ��PIDҲ�ǿ��Ե�,����Ϊʲôʵ���в���ô����?��Ϊ���ӻ���(I)��,������Ӧ����,������(D)������������,ֻ��P�ּ�����Ч,���ֶ���Ϊ��?
��������������������Ӧ���ı�����ڻ�������,�����Ⲣ������Ϊ����±���Ӧ�ó���,����ͨ��������,����ʵ���ڵ�������ϵ,����Ƴ����ĺ��������˫�ջ���������
�ܽ�:
�����ٻ���һ���������������ƹ���
��1.ִ���������ֱ�ӿ���Ŀ������������
��2.���ֿ������ܿ����������ı仯��(��)����
��3.�����˸��취,����ͨ����������������,����ij�����߱仯,�Ӷ��ﵽ��ӿ���Ŀ������������
��4.������߱�����������,����Ŀ������������ʱ��,Ӧ�ò���һ���ܼ�С������ı仯,�ҵ�û������ʱ��,�仯��ҲӦ��Ϊ0����
��5.ѡ�����ʵ�õ�������,�����ѡ��KP����
��6.��������ܳɹ��ı�������Ϊ,��ӿ����ܳɹ�,��ӿ����ܳɹ���ԭ������Ϊ,ִ�����ܸı����,��Ŀ��������֮���м�������ϵ����
����Ϊʲô����������ڻ���������?
��Ϊ������ƿ�������ʱ��,�ڻ���Ŀ�ľ���ʵ����ִ��������ֱ���ܸı�ı仯��,���Ŀ�ľ����ҵ����ʵ�����,������Ŀ����ֱ仯,�Ӷ��ﵽ��ӿ��Ƶ�Ч����
��չ:
���,���������չ������Ŀ���������һ���IJ���,ֻ����������߱�Ϊ��̬λ������ٶȵĹ�ϵ,��һ��ܺ�����,������ͨ���ı���̬�����ﵽ�ı�λ�õ�;����Ҫ**�����ʵ��������ٶȡ�**������,�ڻ���Ȼ���ǽ������Ľ��ٶ�����̬��������Ľ��ٶ����������ڻ���PID����;
�Ź��ں��ϵ�����,������һЩ��,�Ҳ���ԭ������,���ҹ�ԭ������֪
��Ҳд��һƪ�����Ƶ�����,����û��ͼƬ,������ƪ���ӵ�����;
Ϊʲô��Ҫ����PID����(�������С��,���������������)