电路积木
- 入门arduino和51单片机和思科模拟器以及DXP和AD22和Clion和proteus
- 获取资源
入门arduino和51单片机和思科模拟器以及DXP和AD22和Clion和proteus
下载软件
一款arduino软件
arduino软件
一款单片机软件
单片机软件及注册软件hd5x
一款CH340驱动
CH340驱动下载8z9h
一款烧录软件
烧录软件k891
一款思科模拟器软件
思科模拟器2742
一款DXP软件
DXP9j56
一款电路板设计软件
AD22s492
一款Clion软件
Clion871g
一款proteus软件
proteusays3
arduino测试电路的面包板
左右列导通,中间行导通。
安装软件和驱动
驱动是CH341SER.INF文件:CH341驱动
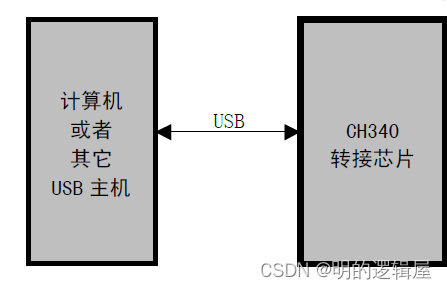
CH340简介
usb的转接芯片实现USB转串口UART,RS232,USB转IrDA红外
SIR。USB转并行打印口。
特点:
1:全速USB,兼容USB V2.0,外围元器件只需要晶体和电容。
2:计算机端与Windows操作系统下的串口应用程序完全兼容。
3:硬件全双工串口内置收发缓冲区,支持通讯波特率
50bps~2Mbps。
4:支持多种常用MODEM联络信号RTS,DTR,DCD,RI,DSR,CTS。
5:可以外接电平转换器件,提供RS232,RS485,RS422接口。
6:支持IrDA规范SIR红外线通讯,支持2400到115200bps波特率
7:通过USB转换的串口,只能做到应用层兼容,而无法绝对相
同。
8:软件兼容CH341,可直接使用CH341的驱动程序。
9:支持5V和3.3V的电源电压。
10:支持SSOP-20无铅封装,兼容RoHS。
CH340的PCB封装
SSOP-20贴片封装。
CH340的引脚
有
VCC,GND,V3,XI,XO,UD+,UD-,NOS#,TXD,RXD,CTS#,DSR#,RI#,DCD#,DTR#,RTS#,ACT#,R232,NC,IR#,CKO,NC引脚
NC空脚,无功能。
VCC和GND电源。
V3电源为切换口,3.3V时连接VCC,5V时外接0.01uf退耦电容。
XI,XO为晶振输入输出。
UD+和UD-为USB信号,直接连到USB总线到数据线。
输入NOS#禁止USB挂起,低电平有效,内置上拉电阻。
输出TXD串行数据输出,R型号为反相输出。
输入RXD串行数据输入,内部有可控的上拉和下拉电阻。
MODEM联络信号
输入CTS#消除发送,低(高)电平有效
输入DSR#数据装置就绪,低(高)电平有效
输入RI#振铃指示,低(高)电平有效
输入DCD#载波检测,低(高)电平有效
输出DTR#数据终端就绪,低(高)电平有效
输出RTS#请求发送,低(高)电平有效
输出ACT#USB配置完成状态输出,低电平有效
输入R232辅助RS232使能,高电平有效,内置下拉电阻,高电平
有效。
输入IR#串口模式设定,内置上拉电阻,低电平为SIR红外线串
口,高电平为普通串口。
输出CKO时钟输出。
CH340的功能
CH340有USB上拉电阻,由此可以直接接USB总线。
CH340内置了电源上电复位电路。
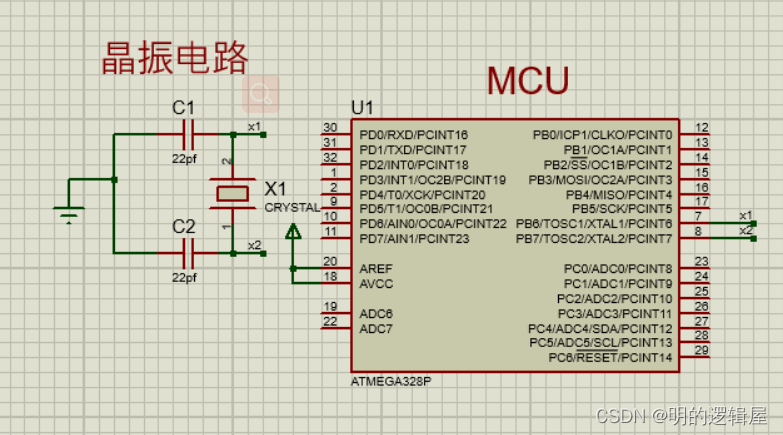
CH340需要外部晶振12MHZ,时钟信号由内置的反相器通过晶体
稳频振荡产生。还需接振荡电容。
CH340芯片支持3.3V和5V的电源。
CH340 自动支持USB 设备挂起以节约功耗,NOS#(作用:不会
让USB设备挂起)引脚为低电平时将禁止USB 设备挂起。
V3引脚详解
CH340 芯片支持5V 电源电压或者3.3V电源电压。
当使用5V 工作电压时,CH340芯片的VCC引脚
输入外部5V 电源,并且V3 引脚应该外接容量为4700pF 或者
0.01uF 的电源退耦电容。
当使用3.3V工作电压时,CH340芯片的V3引脚应该与VCC引脚相
连接,同时输入外部的3.3V电源,并且与CH340芯片相连接的其
它电路的工作电压不能超过3.3V。
异步串口CH340芯片引脚功能
异步串口方式下CH340 芯片的引脚包括:数据传输引脚、
MODEM 联络信号引脚、辅助引脚。
数据传输引脚包括:TXD引脚和RXD 引脚。
串口输入空闲时,RXD应该为高电平,如果R232引脚
为高电平启用辅助RS232 功能,那么RXD引脚内部自动插入一个
反相器,默认为低电平。
串口输出空闲时,CH340T 芯片的TXD 为高电平,CH340R芯片的
TXD 为低电平。
MODEM 联络信号
MODEM 联络信号引脚包括:CTS#引脚、DSR#引脚、RI#引脚、
DCD#引脚、DTR#引脚、RTS#引脚。
计算机应用程序控制并定义其用途。
辅助引脚
辅助引脚包括:IR#引脚、R232 引脚、CKO引脚、ACT#引脚
IR#引脚为低电平将启用红外线串口模式。R232 引脚用于控制辅
助。
RS232 功能,R232 为高电平时RXD引脚输入自动反相。ACT#引
脚为USB设备配置完成状态输出(例如USB 红外适配器就绪)。
IR#和R232 引脚只在上电复位后检查一次。
CH340 内置了独立的收发缓冲区,支持单工、半双工或者全双工
异步串行通讯。
CH340 可以用于升级原串口外围设备,或者通过USB总线为计算
机增加额外串口。
CH340 只需外加红外线收发器,就可以通过USB总线为计算机增
加SIR 红外适配器,实现计算机与符合IrDA 规范的外部设备之间
的红外线通讯。
串行数据
串行数据包括1个低电平起始位、5、6、7或8个数据位、1个或2
个高电平停止位,支持奇校验/偶校验/标志校验/空白校验。
CH340的串口转换
USB转9线串口,通过电平转换电路U8 将TTL 串口转换为RS232
串口。如果只需要实现USB 转TTL 串口,信号线可以只连接
RXD、TXD 以及公共地线,其它信号线根据需要选用,不需要时
都可以悬空。
USB口:USB 总线包括一对5V 电源线和一对数据信号线,通常,
+5V 电源线是红色,接地线是黑色,D+信号线是绿色,D-信号线
是白色。
通过阻值约为1Ω 的电阻连接USB 总线的5V 电源线与USB 产品的
5V常备电源,且两者地相接。连V3和地的电容要在4700pf到
0.02uf之间用来对CH340的内部电源结点退耦。
电容在电源与地之间用于外部电源退耦。
如果仅仅是转RS232,只要RI,TI,GND即可。
RXD脚和TXD脚连外串口时在外串口的2和3脚。
CH340后面接的MAX213/MAX232中,V+接VCC,V-接GND,必须
通过相同的电容。
CH340后面接的PNP9012和其他的元器件来启用了辅助RS232 功
能,V+接VCC,V-接GND,必须通过相同的电容。
CH340也可以直接接到设备,此时CH340前接RC滤波和内部电源
结点退耦电容,会需要可灵活的限流电阻。
晶振电路注意点
适配电容为独石或高频瓷片电容22pf,如果晶体是低端陶瓷那么就
47pf。
设计PCB时注意点
设计印刷线路板PCB 时,需要注意:退耦电容C8 和C9 尽量靠近
CH340 的相连引脚;使D+和D-信号线贴近平行布线,尽量在两侧
提供地线或者覆铜,减少来自外界的信号干扰;尽量缩短XI 和XO
引脚相关信号线的长度,为了减少高频干扰,可以在相关元器件周
边环绕地线或者覆铜。
准备工作
检查计算机设备管理器有无端口。代码写好要记得编译,然后上传
代码,下载到板子。
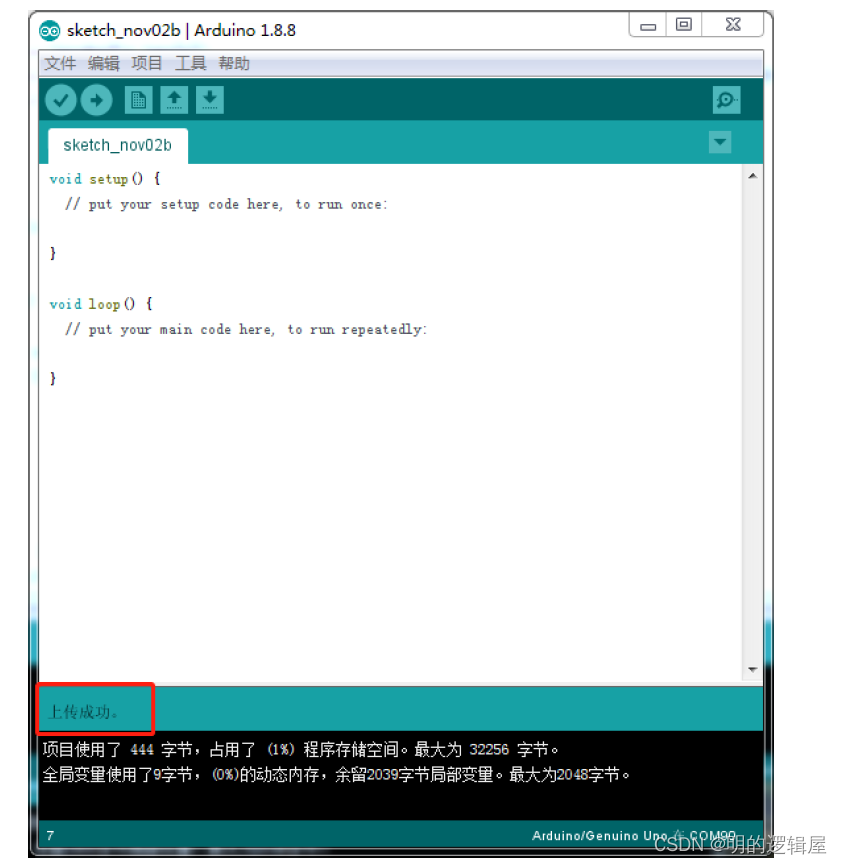
出现上述页面,即代表程序成功下载到了arduino板。
寻找元器件参数,匹配最佳电流
例如LED工作电压为1.5-2V,工作电流为10-20ma,反向击穿电压
5V。
控制逻辑电路。
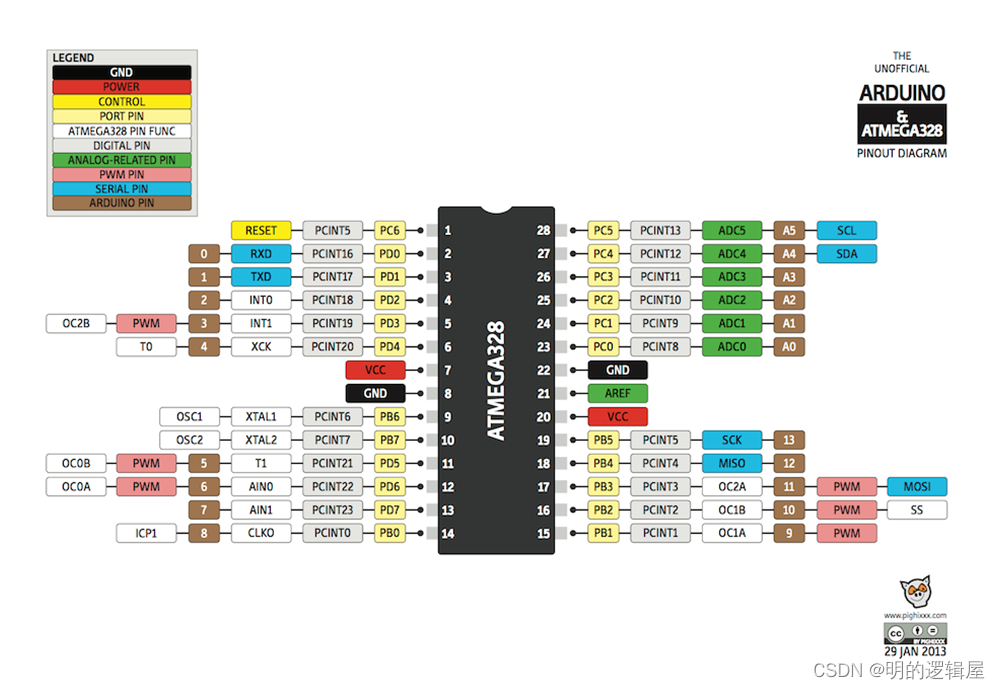
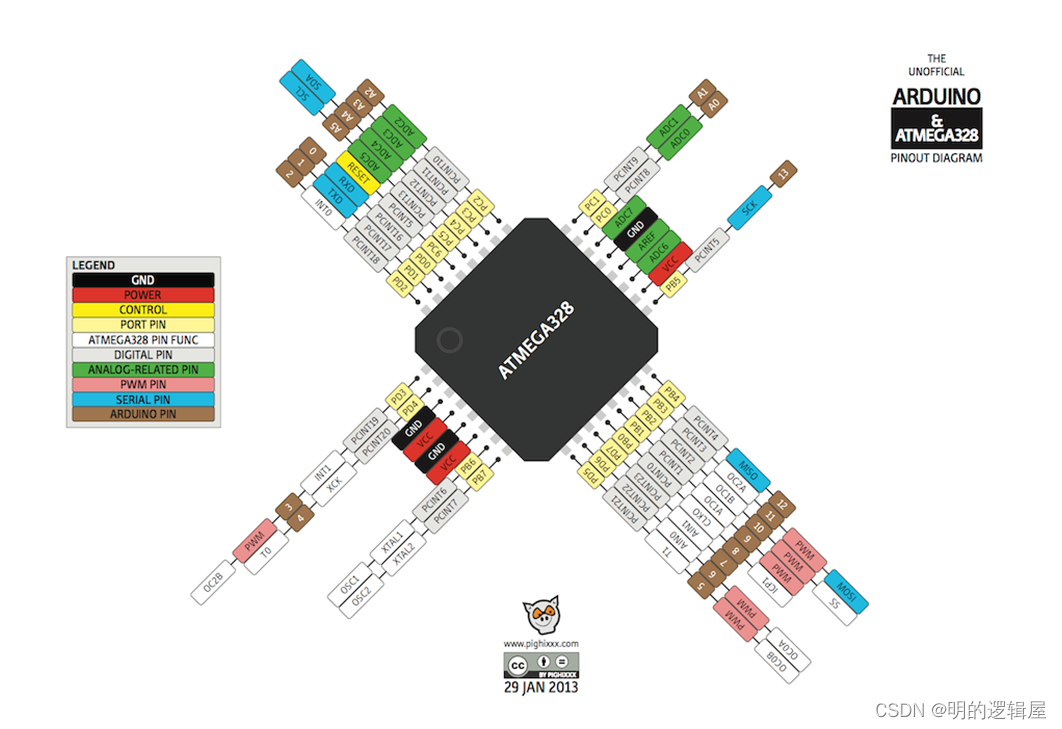
arduino主板
电阻Resistance
定义:我们把导体对电流的阻碍作用称为电阻。
公式:R=ρl/s。G=1/R。
1Ω的物理意义:在导体两端加1V电压,产生1A电流,则该导体的
电阻为1Ω。
电阻的大小与导体的尺寸(比如导线的横截面)和导体的材料是密
切相关的有光和电的特性。
二极管(Diode)
LED
led有缺口为正极,或者长正短负。具体以测量为准。此时以数字
万用表为例。
LED是一种给它一些电压,便会发出光亮的半导体。
LED散发出电磁波(一种振动极高的频率),当这些波可以被人眼
识别,成为可见光。
三色LED
N区的电子和P区的空穴复合,产生自发辐射的荧光。
释放出的能量越多,则发出的光的波长越短。
发光二极管与普通二极管一样是由一个PN结组成,也具有单向导
电性。
限流电阻计算式:R=(E-Uled)/Iled。
LED的控制模式有恒流和恒压两种,恒流更保护寿命。
多种调光模式,模拟调光和PWM调光。
排针
PCB板和面包板,称为万用连接器。
作用是在电路内被阻断处或孤立不通的电路之间,起到桥梁的功
能,担负起电流或信号传输的任务。
贴片SMT(卧贴/立贴),插件DIP(直插/弯插)
特点:单排和双排,直针和弯针,针脚间距为2.54mm和3.96mm,多
种针脚长度。
导线
也指电线。
由铜或铝制成,也有用银线所制(导电、热性好),用来疏导电流
或者是导热。
导线电阻计算:R=ρl/s
USB数据线
特性阻抗
特性阻抗:瞬时点电阻。电场中的信号急速传输。
特性阻抗(ρ)的连续性基本上就取决于分布参数 L0、C0 比值的稳
定性传输高频信号:需要考虑分布电容,分布电感。
测试特性阻抗:光速为例,波长与频率成反比,高频领域容易信号
重叠,通过阻抗匹配可有效减少、消除高频信号反射,控制差分信
号线的特性阻抗对高速数字信号的完整性是非常重要的,特性阻抗
的值会影响差分信号的眼图、信号带宽、信号抖动和信号线上的干
扰电压等。
USB的特性阻抗是90欧姆,当源内阻小于传输线内阻时将出现过
载,过大的过载往往会损坏器件。源内阻大于传输线阻抗时,便会
出欠压 ,这会引起电路逻辑处于不确定状态,可能导致误判或信
号丢失。
USB信号一般是差分信号,可以抑制共模干扰,可以提升信号幅
度。差分信号还有紧耦合和松耦合两种方式,差分信号主要还是靠
地平面来做返回路径;
采用特性阻抗,传输将射频信号以最大功率传送到另一端。
阻抗不匹配,信号传输时就会发生反射。
计算公式:光速=波长*频率。
USB阻值问题
匹配方式有:串联匹配、并联匹配、戴维南匹配等
USB的高速模式和低速/全速使用不同的驱动器
阻抗匹配:
USB全速驱动器的输出阻抗一般比较小,若输出阻抗<特性阻抗则
可以通过串联电阻来实现匹配。
当阻抗>特性阻抗时则要通过并联电阻来实现匹配。
USB高速模式内置45欧姆电阻,低速和全速模式下是电压驱动
的,驱动电压为3.3V,但在高速模式下是电流驱动的,驱动电流为
17.78mA。
主机和设备的D+和D-都有45ohm的电阻端接到地,
高速模式下的差分幅度为单端电压的双倍。
高速模式下加入匹配电阻会使信号幅度下降,使信号质量变差。
高速信号线上串小电阻,那就应该是终端阻抗匹配。如果是GPIO
口上串了小电阻,很可能是抗小能量电压脉冲的。
一般当PCB走线的长度大于其传输信号的波长的1/10时,我们就
需要考虑阻抗匹配。
信号的传输速率大于信号上升的1/4时 就需要阻抗防止电压脉冲对
芯片的影响。
高速数字信号传输线上会串电阻,目地是解决阻抗匹配问题,阻抗
不匹配会导致信号反射。
人眼识别波长
可见光从深红色的750nm波长,400THz频率,到紫色的400nm波
长,750THz频率。
波长计算式(物理学)
波分为横波和纵波。
两种波的波长:
横波:相邻的波峰、波谷或对应的过零点。
纵波:相邻两个密部或疏部之间的距离。
计算式:
波长=光速/频率
能量=频率*普朗克常数(2.998x108m/s)(适用于电磁波)
信号
信号的上升时间取电平幅度值从10%上升到90%的时间范围。
传输延迟,发送接收处理时间、电信号响应时间、介质中传输时间
三个时间的总和。
判别高速信号
判别是否是高速信号:
从频率角度:凡是大于50MHz的信号。(没有直接关系)
从触发角度:信号上升/下降沿小于50ps。
从传输信号角度:
1:信号所在的传输路径长度?于1/6倍传输信号的波长。或者说6
倍传
输延时时间大于信号边沿时间。
2:信号沿着传输路径传输,发?了严重的趋肤效应和电离损耗。
当无法保证该信号在系统中正常?作,?必须进?特殊处理,必要
时还需要经过仿真以确定布局、布线、匹配和屏蔽等设计约束。
高速信号注意点:当为了获取高频信号时要考虑到此时上升沿和下
降沿时间越?,信号的?频分量会越来越多,信号带宽较?,必须
考虑信号的完整性问题。
信号完整性(integrity):信号不能正常响应时,就出现了信号完整性问题。
信号的完整性可以分为狭义和广义。
信号(SI)组成:波形(WI)时序(PI)电源(TI)。
侠义信号主要关注传输线上的信号质量。
广义信号完整性则既包括了侠义信号,也包含电源以及电磁干扰等
相关的内容。
因此在判断一个信号是否会遇到信号是否完整等相关问题的时候,
首先是要确定这个信号算不算高速信号。
追求信号完整性为了:
目的就是用最小的成本,最快的时间使产品达到波形完整性、时序
完整性、电源完整性的要求。
电磁兼容(EMC)
电路板在其电磁环境中符合要求运行并不对其环境中的任何设备产
生无法忍受的电磁干扰的能力。
要求:
1:正常运行过程中对所在环境产生的电磁干扰不能超过一定的限
值。
2:(电磁敏感性)所在环境中存在的电磁干扰具有一定程度的抗
扰度。
组成:
EMI(电磁干扰):机器本身在执行应有功能的过程中所产生不利
于其它系统的电磁噪声。
EMS(电磁耐受性):机器在执行应有功能的过程中不受周围电
磁环境影响的能力。
电磁兼容的两种干扰:
内部干扰是指电子设备内部各元部件之间的相互干扰,包括以下几
种:
工作电源通过线路的分布电容和绝缘电阻产生漏电造成的干
扰;
(与工作频率有关)信号通过地线、电源和传输导线的阻抗互
相耦合,或导线之间的互感造成的干扰;
设备或系统内部某些元件发热,影响元件本身或其它元件的稳定性
造成的干扰;
大功率和高电压部件产生的磁场、电场通过耦合影响其它部件造成
的干扰。
外部干扰是指电子设备或系统以外的因素对线路、设备或系统的干扰,包括以下几种:
外部的高电压、电源通过绝缘漏电而干扰电子线路、设备或系统;
外部大功率的设备在空间产生很强的磁场,通过互感耦合干扰电子
线路、设备或系统;
空间电磁波对电子线路或系统产生的干扰;
工作环境温度不稳定,引起电子线路、设备或系统内部元器件参数
改变造成的干扰;
由工业电网供电的设备和由电网电压通过电源变压器所产生的干
扰。
电磁兼容设计要求:明确指标,寻找被干扰器件,消除或抑制干
扰,验证有无达到指标。
地弹和电源弹
芯片引脚在进行逻辑状态切换时,会有一个大的瞬态电流流过回
路,造成地平面的波动,会造成芯片的地与系统地不一致,称为地
弹;
造成芯片和系统的电源有差压,称为电源弹。
PCB叠层设计时,尽可能增大电源平面叠层之间的垂直距离,减少
电源平面和地平面之间的垂直间距。
电磁干扰(EMI)
电磁干扰三要素:干扰源,干扰受体,干扰路径
以消除作为解决问题。
射频(RF)
无线电频率。
射频―通讯所用的频率范围,大约是300KHz~30GHz。
RF干扰就是射频干扰。
RF干扰产生源:手机、对讲机和医院的X光机和伽玛刀、CT机等
等。
串扰
串扰是指当信号在传输线上传播时,因电磁耦合对相邻的传输线产
生的不期望的电压噪声。
两类电磁耦合:
容性耦合和感性耦合
容性耦合:干扰电压变化作用在电路中,造成感应电流的电磁干
扰。
感性耦合:干扰电流变化产生的磁场中,引起感应电压的电磁干
扰。
互容耦合和互感耦合:
通过产生感应电流分析:
容性耦合又称正向串扰,远端产生对应感应电流。
感性耦合又称反向串扰,近端产生对应感应电流。
信号通过导体时会在相邻的导体上引起两类不同的噪声信号:容性
耦合信号和感性耦合信号。
抖动(波形随机变化)
信号的某特定时刻相对于其理想时间位置上的短期偏离为抖动。
抖动可以降低数字电路的传输性能。
抖动分系统性抖动和随机性抖动:
系统性抖动是由于信号再生装置中定时恢复电路调整不当,或者码
间干扰以及由于电缆均衡有缺陷而产生幅度到相位变换而引起的,
系统性抖动与码型相关;
随机抖动来源于内部干扰信号,如中继器的噪声、串话或反射,随
机抖动与传输码型无关,在大部分现有低速数字系统中系统性抖动
是主要的,在一个多接力段系统中,对所有数字波道都应该确定无
输入抖动时输出抖动的累计平方根值和总的抖动转移函数。
最大容许输入抖动通常与无线段的数目无关,因此应该分别测量所
有数字波道中的每接力段的最大容许输入抖动。
电路划分
判别集中常数和分布常数电路:
集中常数:具有实际尺寸的元器件和传输线,低频电路。
分布常数:将所有元件视为有尺寸,高频电路。
注意:集中常数电路是分布常数电路的特殊电路。当传输线中信号
的振幅和相位近似不变的场合用集中常数电路。
也就是说集中常数电路包含于分布常数电路。
电阻(Resistance)
导体对电流的阻碍作用就叫该导体的电阻。
导体的电阻越大,表示导体对电流的阻碍作用越大。
电阻计算公式
串联:R总=R1+R2+R3
并联:1/R总=1/R1+1/R2+1/R3或用电导相加。
定义式:R=U/I
决定式:R=ρl/s
电阻率随温度变化:ρ=ρ0(1+αt)(非线性变化)
超导
一定温度下,电阻就变成了零。
作用:
采用超导材料,就可以大大降低由于电阻引起的电能消耗。也不用
考虑散热的问题,元器件尺寸可以大大的缩小,更好推动元器件微
型化。
光敏电阻
在特定波长的光照射下,其阻值迅速减小的特性。
光敏电阻器是利用半导体的光电导效应制成的一种电阻值随入射光
的强弱而改变的电阻器,又称为光电导探测器;
入射光强,电阻减小,入射光弱,电阻增大。还有另一种入射光
弱,电阻减小,入射光强,电阻增大。
光敏电阻的光谱特性
只要人眼可感受的光,都会引起它的阻值变化。
由此可将光敏电阻划分为:紫外光敏电阻器、红外光敏电阻器、可
见光光敏电阻器。
灵敏度:光电阻与暗电阻之间的相对变化。
光谱响应:光敏电阻在不同波长下的电阻敏感度。
电位器(Potentiometer)
组成:电阻体和转动或滑动系统组成。
参数:阻值、额定功率、阻值允许偏差、最大工作电压、额定工作
电压、绝缘电压、温度参数、噪声电动势及高频特性等参数。
作用:获得与输入电压(外加电压)成一定关系的输出电压,因此
称之为电位器。
应用中的角色:分压器,变阻器,电流控制器。
压敏电阻
压敏电阻:电路承受过压时进行电压钳位,吸收多余的电流以保护
敏感器件。
压敏电阻可以将电压钳位到一个相对固定的电压值,从而实现对后
级电路的保护。
用法:压敏电阻器常常与被保护器件或装置并联使用。
超声波模块
利用时间差和声音传播速度。
TRIG引脚拉高10微秒以上再拉低产生一个脉冲起始信号。
ECHO检测到反射回来的信号时就会被拉低。
超声波模块计算公式
(ECHO引脚高电平持续的时间*340m/s)/2。(340m/s为声速)除
二是为计算单程距离。
温湿度模块
将外界大量信号中采集温度或湿度信号,经过稳压滤波、运算放
大、非线性校正、V/I转换、恒流及反向保护等电路处理后,转换
成与温度和湿度成线性关系的电流信号或电压信号输出,也可以直
接通过主控芯片进行485或232等接口输出。
WIFI模块(串口WIFI模块)
工作在物联网传输层。
WIFI模块是物联网应用和智能硬件组成部分。
功能是串口或TTL电平转为符合Wi-Fi无线网络通信标准的嵌入式模
块,内置无线网络协议IEEE802.11b.g.n协议栈以及TCP/IP协议
栈。
WIFI模块分为:
通用Wi-Fi模块(CPU),路由器方案Wi-Fi模块(Flash,芯片加Linux操
作系统),嵌入式Wi-Fi模块内置Wi-Fi驱动和协议,接口为一般的
MCU接口如UART等)
LCD1602
一种字符型液晶显示模块。(共两行,一行16个字符)
以LCD1602A为例。
LCD1602A引脚功能(16引脚)
V0(液晶显示偏压)(VL)(Vee)为液晶显示器对比度调整端,接正电
源时对比度最弱,接地电源时对比度最高(对比度过高时会 产生“鬼
影”,使用时可以通过一个10K的电位器调整对比度)。
RS(数据/命令选择)为寄存器选择脚,高电平时选择数据寄存器、
低电平时选择指令寄存器(命令选择)。
R/W为读/写信号线,高电平时进行读操作,低电平时进行写操
作。
E(或EN)端为使能(enable)端,下降沿执行指令。
| RS | RW | 功能 |
|---|---|---|
| 高电平 | 低电平 | 写入数据 |
| 低电平 | 高电平 | 读忙信号 |
| 低电平 | 低电平 | 写入指令或显示地址 |
D0~D7为8位双向数据端。无论是传输地址的指令还是
传输字符的指令都是通过D0-D7这八根线进行传输,由
RS引脚确定。
A(BLA)背光源正极。
K(BLK)背光源负极。
显示单元个数为分辨率。
LCD1602应用步骤:
先初始化,init函数。检测是否在读,然后再写入。
写操作:两个函数,方位函数和数据函数都是如下:(先
检测读操作,由于操作时序,加空函数延时,先写指
令,后使能。)
读操作:由于操作时序,加空函数延时。
初始化函数:写操作+指令集。
显示函数:初始化+一个方位+数据传入。(保证d7高电
平,加0x80,然后每多一行加0x40(一行64个显示单
元)。)
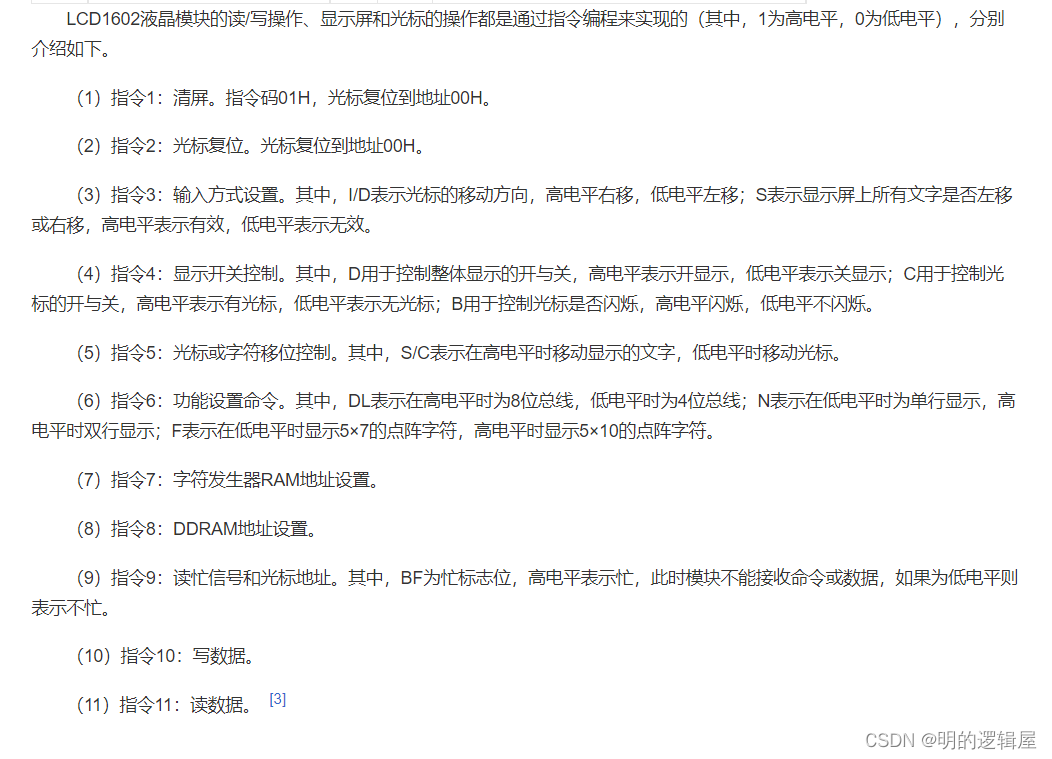
LCD1602指令集

LCD1602连接操作
直接控制:LCD1602的8根数据线和3根控制线E,RS和R/W与单
片机相连后即可正常工作。
间接控制:四线制工作方式(只采用引脚DB4~DB7与单片机进行通
信,先传数据或命令的高4位,再传低4位。),利用
HD44780所具有的4位数据总线的功能。
区别只是所用的数据线的数量不同。
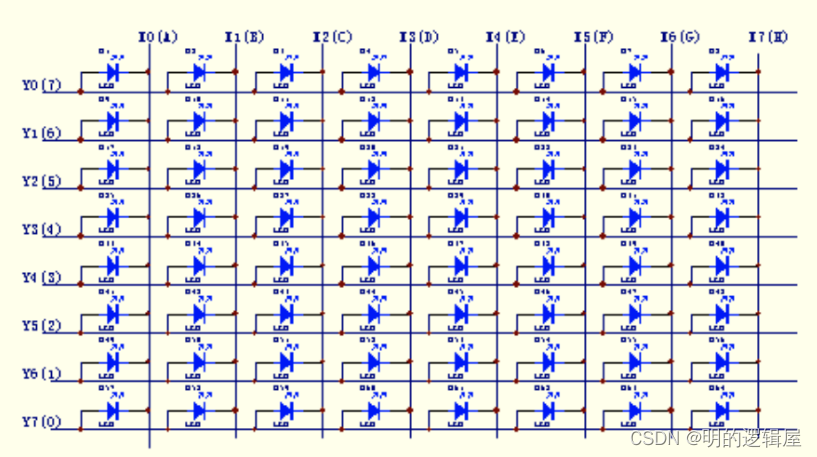
8乘8点阵(行共阳,行共阴)
8*8点阵等效原理图
遥控器
一种无线发射装置。
流程:将按键信息进行编码,通过接收装置解析为电信号,由处理
器进行解码。
功能:远程操控设备。
按键
硅胶按键。
优点:硅胶按键具有优良的耐热性、耐寒性、耐环境性、电气绝缘
性、耐疲劳性等特点。
按键选取需考虑的因素:直径、长宽高、按键行程距离、按力要
求、硬度、颜色、导电要求等。
薄膜键盘
按键较多且排列整齐有序的薄膜开关。
组成:面板、上电路、隔离层、下电路。
制作材料:基材应采用聚酯(聚邻苯二甲酸乙二醇酯)薄膜(Polyester简称
PET):良好的绝缘性和耐热性,较高的机械强度、透明性和气密性,抗折性和
高弹性。
电池(Battery)直流电压
起源:伏特电堆。
参数:电动势E,额定容量(电池的实际容量往往低于理论容
量),额定电压(只与电极活性物质的种类有关,而与活性物质的
数量无关。),开路电压,内阻,阻抗,充放速率,自放电率。
噪声:某些特殊条件下,电极反应所引起的金属晶体或某些成相膜
的相变会造成电压的微小波动。波动的幅度很小但频率范围很宽,
故可与电路中自激噪声相区别。
内阻:电流通过电池内部时受到的阻力。
分为:欧姆内阻和极化内阻。
极化内阻:电化学极化内阻和浓差极化内阻。
电池的内阻不是常数,在充放电过程中随时间不断变化(逐渐变
大)。欧姆内阻遵守欧姆定律,极化内阻随电流密度增加而增大,
但不是线性关系。常随电流密度增大而增加。
内阻是决定电池性能,直接影响电池的工作电压,工作电流,输出
的能量和功率,对于电池来说,其内阻越小越好。
阻抗:电池等效为一大电容与小电阻、电感的串联回路。电池的阻
抗随时间和直流电平而变化,所测得的阻抗只对具体的测量状态有
效。
充放速率:时率和倍率。
时率是以充放电时间表示的充放电速率。而倍率就是时率的倒数。
自放电率:电池在存放过程中电容量自行损失的速率。
电池极化
极化现象:
电流流过电极时,电极电势都要偏离热力学平衡的电极电势,这种
现象。
电流密度越大,极化越严重,能量损失也越大。
分类:
各部分电阻造成的极化称为欧姆极化。
电极-电解质界面层中电荷传递过程的阻滞造成的极化称为活化极
化;
电极-电解质界面层中传质过程迟缓而造成的极化称为浓差极化。
减小极化:增大电极反应面积、减小电流密度、提高反应温度以及
改善电极表面的催化活性。
电机(Electric machinery)
电磁感应定律实现电能转换或传递的一种电磁装置。
作用:产生驱动转矩以成为动力源。
定子:产生磁场。
转子:定子旋转磁场产生感应电动势及电流,形成电磁转矩促使电动机旋转。
发电机:
发电机在电路中为G,它的主要作用是利用机械能转化为电能。
转子:产生发电机的磁场。
定子:被磁场中的磁力线切割。
电机分类
工作电源种类划分:可分为直流电机和交流电机。
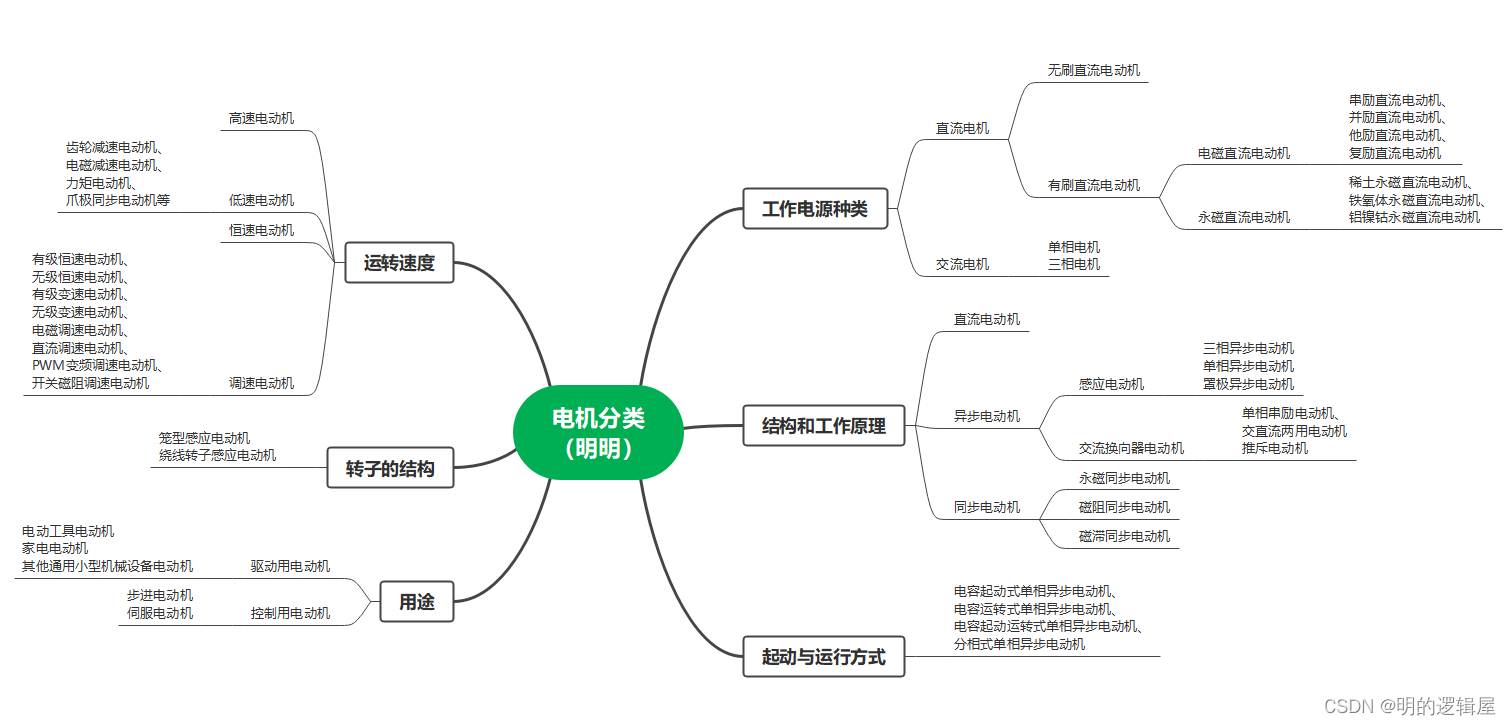
直流电机
工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷
端引出时变为直流电动势。
电磁电机
电磁式直流电动机由定子磁极、转子(电枢)、换向器(俗称整流子)、电刷、机壳、轴承等构成。
电机励磁
提供定子或者转子电源或提供工作磁场的机器。
他励:由其他直流电源对励磁绕组供电(起动转矩与电枢电流成正比)。(消弱磁场恒功率来提高转速或通过
降低转子绕组的电压来使转速降低。)
并励:并励直流电机(起动转矩与电枢电流成正比)的励磁绕组与电枢绕组相并联。(消弱磁场的恒功率来调
速。)
串励:串励直流电机(励磁电流与电枢电流成正比)的励磁绕组与电枢绕组相串联。(外用电阻器与串励绕组
串联(或并联)、或将串励绕组并联换接来实现调速。)
复励:复励直流电机有并励和串励两个励磁绕组。(转速可通过消弱磁场强度来调整。)
电刷与换向器滑动接触,为转子绕组提供电枢电流。
调速方式并不绝对。
右手定则(感应电动势方向)
感应电动势的方向按右手定则确定(磁感线指向手心,大拇指指向导体运动方向,其他四指
的指向就是导体中感应电动势的方向)。
左手定则(安培力和洛伦兹力)
使用准备:左手的食指,中指和拇指伸直,使其在空间内相互垂直。
关联量:安培力 F (或运动)的方向、磁感应强度B的方向 以及通电导体内的电流I。
食指方向代表磁场的方向(从N级到S级),中指代表电流的方向(从正极到负极),那拇
指所指的方向就是受力的方向。
判定安培力:
导线在磁场中力的方向。
伸开左手,使拇指与其他四指垂直且在一个平面内,让磁感线从手心流入,四指指向电流方向,大拇指指
向的就是安培力方向(即导体受力方向)。
判断洛伦兹力:
将左手掌摊平,让磁感线穿过手掌心,四指表示电流方向,则和四指垂直的大拇指所指方向即为洛伦兹力
的方向。注意,运动电荷是正的,大拇指的指向即为洛伦兹力的方向。反之,如果运动电荷是负的,仍用
四指表示电荷运动方向,那么大拇指的指向的反方向为洛伦兹力方向。
两者关系:安培力是导体内定向移动的电荷所受洛伦兹力的合力(多个力的矢量和)。
电流方向与磁场平行时,电荷的定向移动方向也与磁场方向平行,所受洛伦兹力为零,其合力安培力也为
零。
功的公式W=FScosθ,θ=90°时,W=0。
安培定则(右手螺旋定则)
通电直导线中的安培定则一:用右手握住通电直导线,让大拇指指向电流的方向,那么四指的指向就是磁
感线的环绕方向;(找磁感线)
通电螺线管中的安培定则二:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端
是通电螺线管的N极。(找磁极)
电机转速公式
无刷直流电动机:n=120*f / p。p是磁极对数,f是电源频率,n是电机转速。
交流异步电动机:s=(ns-n)/ns。s为转差率,ns为磁场转速,n为转子转速。
同步电机:n=ns=60f/p。ns为同步转速。
步进电机(脉冲电动机)
将电脉冲信号转换成相应角位移或线位移的电动机。
每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正
比,转速与脉冲频率成正比。
舵机(位置可控伺服的电机)
自动驾驶仪中操纵飞机舵面(操纵面)转动的一种执行部件。
组成:外壳、电路板、驱动马达、减速器与位置检测元件。
分类:
电动舵机:电动机、传动部件和离合器组成。
液压舵机,由液压作动器和旁通活门组成。
电动液压舵机,简称“电液舵机”。
水泵(输送液体或使液体增压的机械)
水泵性能的技术参数有流量、吸程、扬程、轴功率、水功率、效率等。
分类:
容积式泵:利用工作腔容积周期变化来输送液体。
叶片泵:利用叶片和液体相互作用来输送液体。
离心泵:高速旋转所产生的离心力。
轴流泵:物质推力。
混流泵:离心+轴流。
数码管(辉光管)(LED数码管)
显示数字和其他信息的电子设备。大部分为氖加上一些汞和/或氩。
显示颜色相关:数码管产生什么的颜色光,视乎管内的气体而定。
分类:共阳极数码管和共阴极数码管。
led数码管(LED Segment Displays)是由多个发光二极管封装在一起组成。
数码管驱动方式:
静态显示:每一个段码都由一个单片机的I/O端口进行驱动,优点是编程简单,显
示亮度高,缺点是占用I/O端口多。
动态显示:动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连
在一起,每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O
线控制,打开对应位选通来开启数码管显示。
由于人的视觉暂留现象及发光二极管的余辉效应,因此数码管点亮时间1~2ms为
佳。扫描的速度足够快,就可以欺骗眼睛。节省大量的I/O端口,而且功耗更低。
蜂鸣器
一种一体化结构的电子讯响器。采用直流电压供电。
工作原理:蜂鸣器的发声原理由振动装置和谐振装置组成。
蜂鸣器分类
蜂鸣器按结构分类
压电式蜂鸣器和电磁式蜂鸣器。
压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组
成。
电磁式蜂鸣器主要由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。
电磁式蜂鸣器工作原理:振荡器产生的音频信号电流通过电磁线圈,使电磁线圈
产生磁场。振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。
多谐振荡器
多谐振荡器由晶体管或集成电路构成。
阻抗匹配器
传输线上达至所有高频的微波信号皆能传至负载点,不会有信号反射回来源点。
要求:负载阻抗要和传输线的特征阻抗相等。
阻抗匹配:有两种,一种是透过改变阻抗力(lumped-circuit matching),另一种
则是调整传输线的波长。
纯电阻电路中使输出功率最大:负载电阻等于激励源内阻时,此时匹配。
当两者含有电抗,满足共轭(相互关系上具有某些共同特点,但个别方面又有相反的
特点的属性)的关系(电阻相等,电抗相反),为共扼匹配。
匹配方式:
串联终端匹配:(抑制反射),信号源端阻抗低于传输线特征阻抗。
并联终端匹配:(抑制反射),信号源端阻抗很小。
戴维南终端匹配(双电阻形式的并联匹配):缺点:带来直流功耗。
AC终端匹配(AC并联端接):消除直流功耗。
以上二者:达到匹配要求,终端的电阻并联值要和传输线的特征阻抗Z0相等。
天线阻抗(电抗与电阻)
将一个复杂负载连到一个纯阻性源上,最常见的情形是在负载与纯阻性源之间构
造一个匹配网络。
匹配网络的阻抗必须等于负载的复阻抗的共轭。
蜂鸣器按发声原理分类(有无震荡源)
蜂鸣器又分为无源他激型与有源自激型。
无源他激型:方波信号输入谐振装置转换为声音信号输出。(直接转)
有源自激型:直流电源输入经过振荡系统的放大取样电路在谐振装置作用下产生
声音信号。(反馈取样)
火焰传感器(flame transducer)
火焰的热辐射具有离散光谱的气体辐射和连续光谱的固体辐射。
功能范围:搜寻火源,检测光线的亮度。
工作过程:红外线接收管接收外部特定信号,并用该传感器转化为电平信号,输
入到中央处理器中,中央处理器根据信号的变化做出相应的程序处理。A/D转换器
反映为0~255范围内数值的变化。
分类依据:波长范围
有红外和紫外之分。
霍尔传感器(外加电源才能工作)
霍尔效应制作的一种磁场传感器。
参数:
霍尔系数:判断半导体材料的导电类型、载流子浓度及载流子迁移率等。
霍尔电势大小:Rh为霍尔常数,它与半导体材质有关;I为霍尔元件的偏置电流;
B为磁场强度;d为半导体材料的厚度。
霍尔电压由来:半导体薄片两端通以控制电流I,并在薄片的垂直方向施加磁感应
强度为B的匀强磁场,此时电子流发生偏移,则在垂直于电流和磁场的方向上,将
产生电势差为UH的霍尔电压。
霍尔传感器分类
线型霍尔传感器:输出电压与外加磁场强度呈线性关系。
开关型霍尔传感器:磁场可控电压,磁场高电压低,磁场低电压高,有缓冲区
域。
锁键型霍尔传感器:磁场输入到达临界,则输出电压低。必须输入反向磁场,才
有动作。(磁场撤销时,可保输出状态不变)
晶振(压电效应)(机械心脏)
石英晶体:高度稳定的信号。提供较稳定的脉冲。
串联谐振fs和并联谐振fp
当f=fs时,石英晶体呈阻性,相当于阻值小的电阻。
在两频率之间为石英晶体呈感性。
否则为容性。
晶片加上适当的交变电压,会谐振。
共振状态为最优。
使用时需注意:
判断反馈电路的类型。
推出电路的振荡过程
参数:参数有标称频率、负载电容、频率精度、频率稳定度等。
咪头(传声器)(microphone)
一种声转电的传感器。
工作原理:声音使震膜振动,传声器内部发生电磁感应产生电流,信号传输到扩
音器时,进行电转声。
分类:动圈式、电容式、驻极体和硅微传声器和液体传声器和激光传声器。
参数:灵敏度,频率响应,阻抗,信号噪声比,动态范围,等效噪声级,总谐波
失真(THD)。
咪头接头
4个方向:
接地
立体声时为右声道;平衡单声道时为反相讯号;或做为单声道的电源输入端
立体声时为左声道;平衡单声道时为正相讯号;非平衡单声道时的信号输出端
绝缘环
倾斜开关
倾斜开关探头在受到外力作用且偏离垂直位置17度以上时,内部的金属球触点动
作。
继电器(relay)
一种电控制器件。
小电流去控制大电流运作的一种“自动开关”。
继电器一般都有能反映一定输入变量(如电流、电压、功率、阻抗、频率、温
度、压力、速度、光等)的感应机构(输入部分);
在继电器的输入部分和输出部分之间,还有对输入量进行耦合隔离,功能处理和
对输出部分进行驱动的中间机构(驱动部分)。
作用:扩大控制范围,放大,综合信号,自动、遥控、监测。
万用表测导通

打到蜂鸣档,红+黑-来测正向导通。
获取资源
链接: 点击下载文件
提取码:zqiq