ǰ��
ƽ��С������ǰǰ���Ҳ���������,�����ʱ������ĺ��Ѱ�,������Ҫ����,���ǻ���,��������,��ʾ��Ƶ����,�������ӷ������������,ϣ����Ҷ��֧��
����Ŀ¼
һ���ȿ�֮·
1.�̼���תhal���������
�սӴ�hal�⿴�ƺܼ�,��ʵ�кܶ�����,��Ϊ��������,������stm32f103c8t6оƬ����ס��,����ΪоƬ����,����ҵ�һЩ�������²Ž����
2.mpu6050
����ʹ�����ģ��,��İ��,�������ҵ��˺ܶ�����,�ſ�ʼ�ô���,���mpu6050����ʼ��,������,��������ֻ��������ѭ��ʹ��,������ʹ��INT�����ⲿ�жϾ���ʱ,����û�н��,���ʹ�ö�ʱ����10ms����ʱ
3.�������ѡ��
��ʼʹ��TB6612�������,���Dz�֪����·����������,����оƬ�ջ�,���ڶ��Ѿ�������Ӱ��,����ѡ��a4950,PCB����Ҳ�Ǹ���������,������Ϊʹ��a4950ģ��ÿ������PWM��������һ��,����PID,���ȷ��L298NΪ�������ģ��
4.��Դ����
���PCBʱʹ�õ�a4950���ǵ�5V����,��������12-5v��ѹģ��,���ֿ���stm32����Ϊ3.3v��ѹ,������PCB�ּ���һ��5-3.3V��ѹģ��
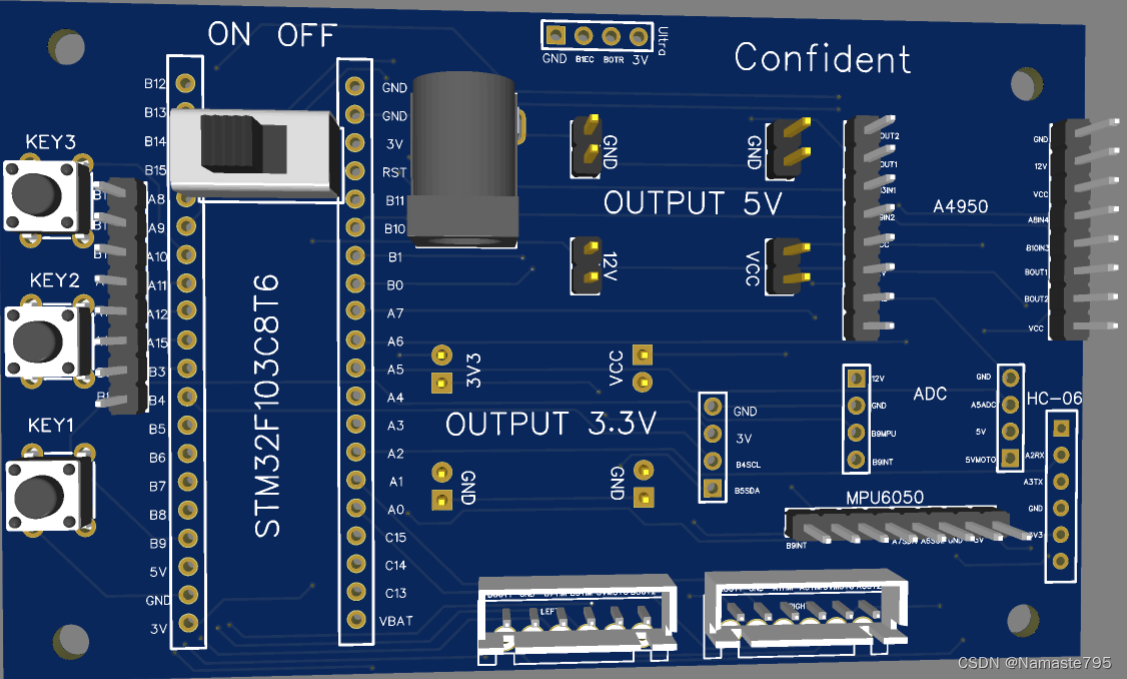
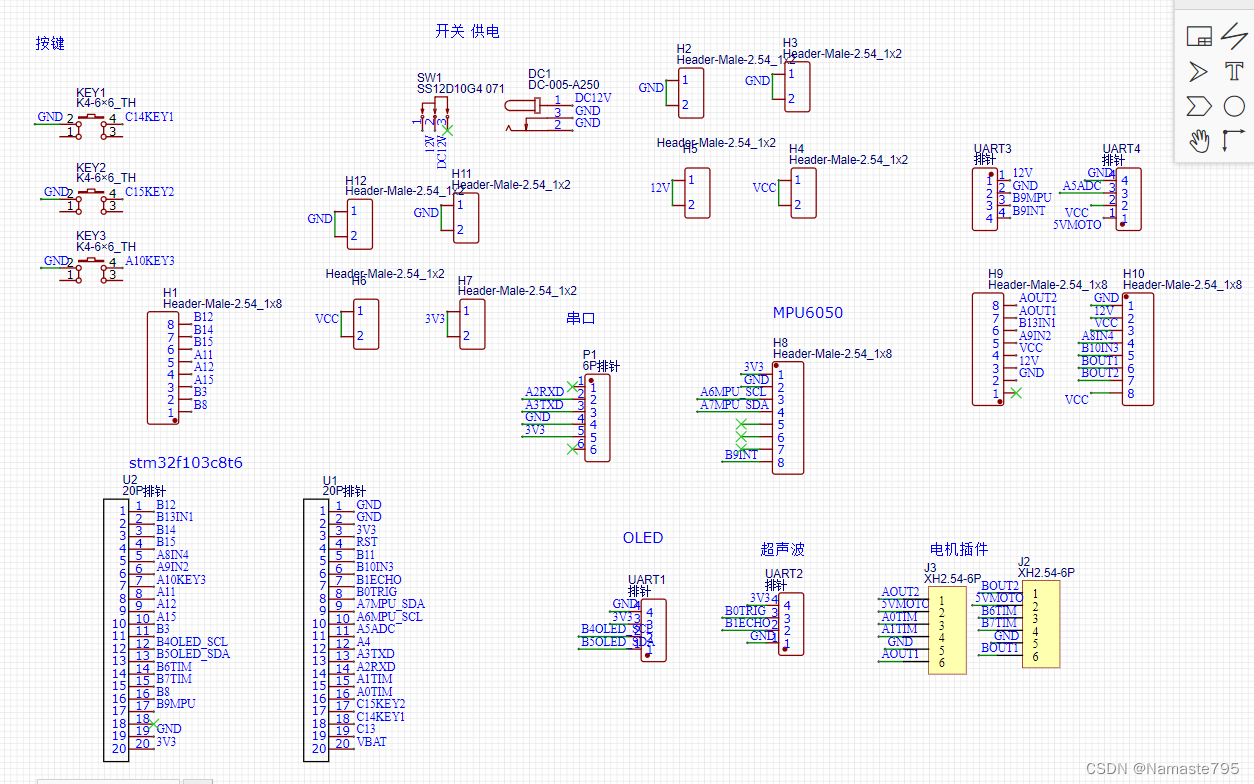
5.PCB���
û�п��ǵ�OLED��λ��,a4950�����ŷ������෴����,mpu6050��λ��û�й̶������ɶ�,Ӱ��Ƕ�,�õ�һ����,�Ұ�û���õ����������˳���,���Һ����ı䷽�������˼���ı�����
����ģ��ѡȡ
1.���������ļ��ٵ�����ܱ����
2.����оƬSTMF103C8T6
3.IIC�ӿ�OLED
4.MPU6050�C��̬������
5.HC05����ģ��
6.12ת5V,5ת3.3V��ѹģ��
7.ADC��Դģ��
8.12V��Դ
�����������Բ��ֵ���Ҫ����
1.MPU6050
��ʼ��
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_TIM3_Init();
printf("init=%d\r\n",mpu_dmp_init());
while(mpu_dmp_init()); //dmp��ʼ��
printf("OK!\r\n");
HAL_TIM_Base_Start_IT(&htim3);//ÿ10ms����һ���ж�
��ʱ���жϲ���
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)//�����ж�
{
mpu_dmp_get_data(&OutMpu.pitch, &OutMpu.roll, &OutMpu.yaw);
MPU_Get_Accelerometer(&OutMpu.aacx,&OutMpu.aacy, &OutMpu.aacz); //���ٶȴ���������
MPU_Get_Gyroscope(&OutMpu.gyrox, &OutMpu.gyroy, &OutMpu.gyroz); //�õ�����������
OutMpu.temp=MPU_Get_Temperature(); //�õ��¶���Ϣ
}
}
2.���������
��ʼ��
void TIM_Init(void)
{
//��ʱ��1 PWW
//2 ������
//3 �ж�
//4 ������B
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);//PWM 10kZ 7199
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_1);//������
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim3);//ÿ10ms����һ���ж�
HAL_TIM_Encoder_Start(&htim4,TIM_CHANNEL_1);
HAL_TIM_Encoder_Start(&htim4,TIM_CHANNEL_2);
}//����4230;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance ==TIM3)
{
Rcnt = Read_Speed(2);//����
Lcnt = -Read_Speed(4);
if(dir == 1)
PWM++;
else
PWM--;
Set_Pwm(PWM,PWM);//zuo you
}
}
3.����ͨ��
�жϽ���
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART2)
{
abc=HAL_UART_Receive_IT(&huart2,UART_Receive_buffer, 1);
if(UART_Receive_buffer[0]=='A')
{
printf("\r\nYou send data : %d\n",UART_Receive_buffer[0]);
}
else
printf("\r\ntest");
HAL_UART_Transmit(&huart2,UART_Receive_buffer,1,0xffff);
}
}
�ġ�PID����
1.ֱ����
����ϵ��KP��ȷ��
- ʹ��ϵ��KD��������
- ���ѡ��һ����,�жϵ����ת����,ȷ��С����ǰ��,������ǰת
- ������PWM��������,�����ҵ�С��������4000,PWM���ֵΪ7200,���踩����Ϊ10��,��(7200-4000)/10=320,��ô�ҵ�KP��ΧΪ0-320
- ȡ�м�ֵKP,��������,ֱ��С������ƽ��һ��ʱ��,��ʱKp��ȷ����
��ϵ��KD��ȷ��
- ͬ���ķ���,ʹ����ϵ��KP��������
- �жϼ���
- ����KD��Χ
- ����,ʹС������ƽ��һ��ʱ��
���KP,KDͬʱ����PWM,����*0.6,��������KP,KD
2.�ٶȻ�
����ϵ��KP��ȷ��
- ���Ե�ȷ��,�ر�ֱ������Ӱ��,�����趨һ��KPֵ,KI����KP/200,ת��һ������,��һ������ Ҳ��ͬһ����ת��,������ȷ
- ����KP��ΧKP=(7200-4000)/(160*40%)=50,��KP��Χ(0-50)
- ȡ�м�ֵ,��ֱ����������,����С��״̬�ı����
����ϵ��KI��ȷ��
1.KI����KP/200
3.ת��
����ϵ��KP��ȷ��
1.�������������PWM�����ռ����ֵΪ3200,��ô�������Ӽ���Ϊ1600��ת��PWM�ռ�
2.����Ŀ��Ƕ�,ƫת�Ƕ�,Turn=-Turn_TargetPID.Turn_KP-gyroPID.Turn_KD;������ķ�Χ
��ϵ��KD��ȷ��
1.Kd = Kp/100;
�塢��������
1.����PCB
�������ģ��������Ϊ��L298N��
�ܽ�
ƽ��С��������,ǰ������ĺ��Ѱ���,һ�����������,��ᷢ��ԭ������Ҳûʲô,�dz���лCSDN��Դ��������Դ,ʵ����ѧ����֧��,Bվ��Դ,����������ῪԴ��������,ϣ���Դ����������,Ҳϣ����ҿ�����������ˡ�
�ٶ����̴���
����:https://pan.baidu.com/s/11l6evi1tm7rRGBleDvpYqw
��ȡ��:nwei
csdn��Դ���ݺ�����һģһ����