基于平台:韦东山imx6ull_pro 开发板
一、前言
我们一般在学习任何一个板子的时候,无论是51单片机、stm32、arduino还是我们的Linux开发板。我们的入门程序一般都是从点灯开始。即:点亮LED灯。
一般学习过其他的开发板的,一般都知道led灯要如何去点亮:
1.看原理图,确定控制 LED 的引脚;
2.看主芯片的芯片手册,确定如何设置控制这个引脚;
3.写程序;
主要就是通过这三步对led灯进行点亮。
二、硬件知识
1、原理图
每一款开发板都有自己的原理图,我们在这里是点亮LED灯为例。即找到LED灯模块确定其控制引脚。
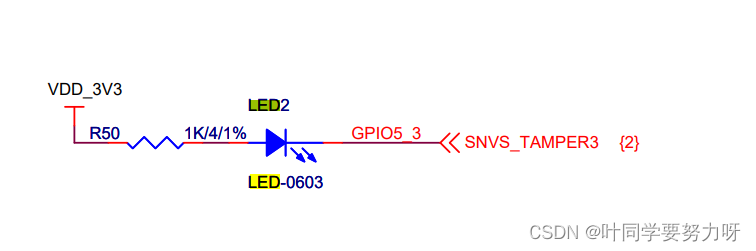
在原理图上我们可以确定他的控制引脚为GPIO5_3。
知道引脚后我们就可以查阅其芯片手册来进行对GPIO5_3进行控制。
2、GPIO操作方法
对于GPIO的操作方法,学习过stm32的可以会知道,一般来说要对GPIO进行控制有以下的步骤:
①打开时钟源
②选择模式(Mode)
③设置电平
打开我们所涉及的芯片手册(我所用为:imx6ull)。
GPIO 的控制涉及 4 大模块:CCM、IOMUXC、GPIO 模块本身。如下图:
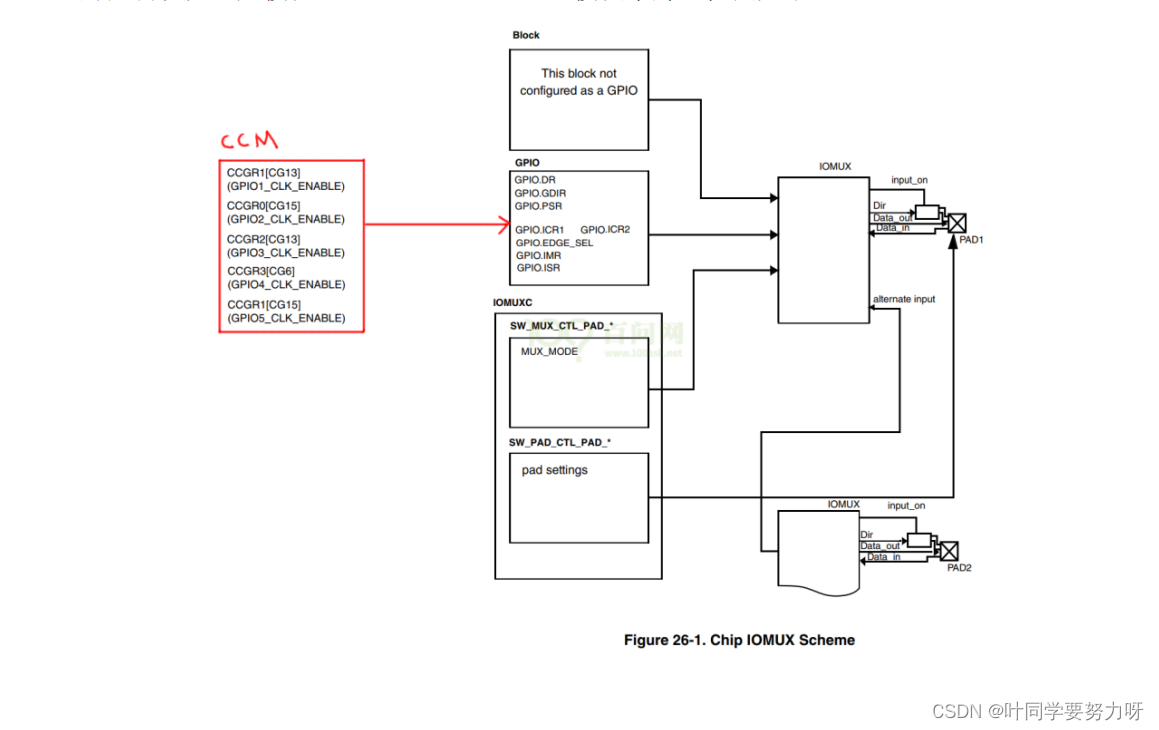
①CCM设置时钟
CCM的时钟主要是要用CCM_CCGRy寄存器中的 2 位来决定该组 GPIO 是否使能。其CCM_CCGR主要有四种模式

不同的数值代表着不同的工作模式:
① 00:该 GPIO 模块全程被关闭
② 01:该 GPIO 模块在 CPU run mode 情况下是使能的;在 WAIT 或 STOP 模式下,关闭
③ 10:保留
④ 11:该 GPIO 模块全程使能。
另外我们知道对于IMX6ULL_PRO的GPIO一共有五组。即:
GPIO1 有 32 个引脚:GPIO1_IO0~GPIO1_IO31;
GPIO2 有 22 个引脚:GPIO2_IO0~GPIO2_IO21;
GPIO3 有 29 个引脚:GPIO3_IO0~GPIO3_IO28;
GPIO4 有 29 个引脚:GPIO4_IO0~GPIO4_IO28;
GPIO5 有 12 个引脚:GPIO5_IO0~GPIO5_IO11;
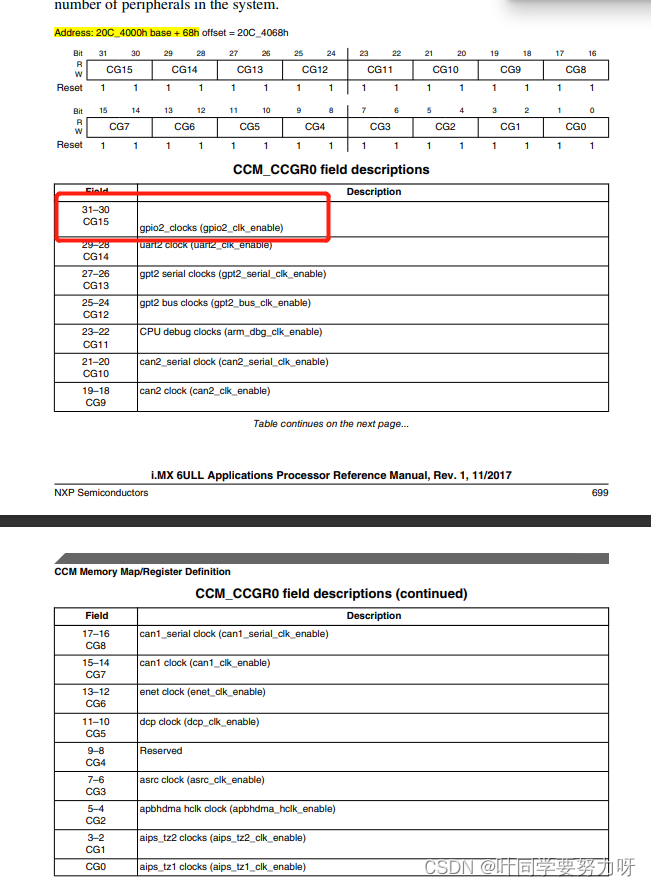
查阅手册我们知道CCM_CCGR0主要对GPIO2的时钟进行控制,另外,CCM_CCGR0也不止控制GPIO2的时钟,对于其他的也有进行控制
(不同的位开启的时钟也不一样)。
CCM_CCGR0地址:0x020C4000 + 0x68
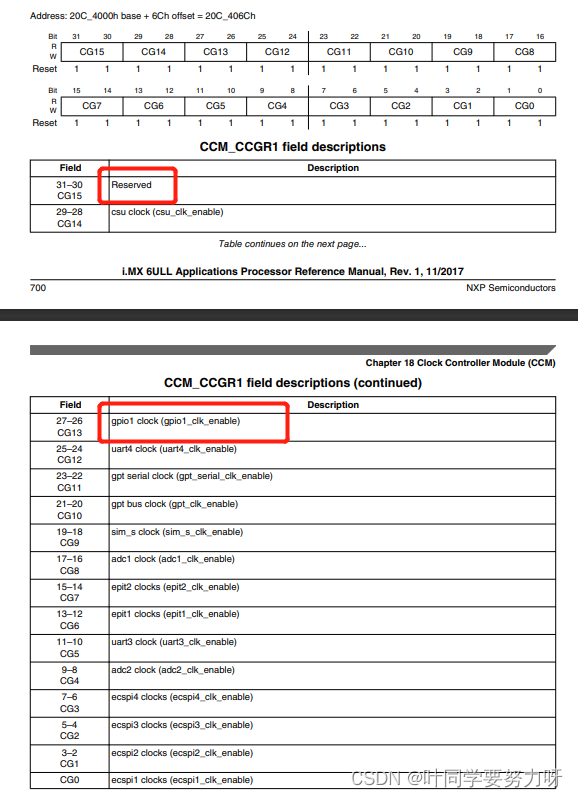
而CCM_CCGR1主要控制两个时钟。GPIO1和GPIO5,而GPIO5是默认是开启的,无需设置。
CCM_CCGR1地址:0x020C4000 + 0x6C
CCM_CCGR2主要对GPIO3进行控制。
CCM_CCGR2地址:0x020C4000 + 0x70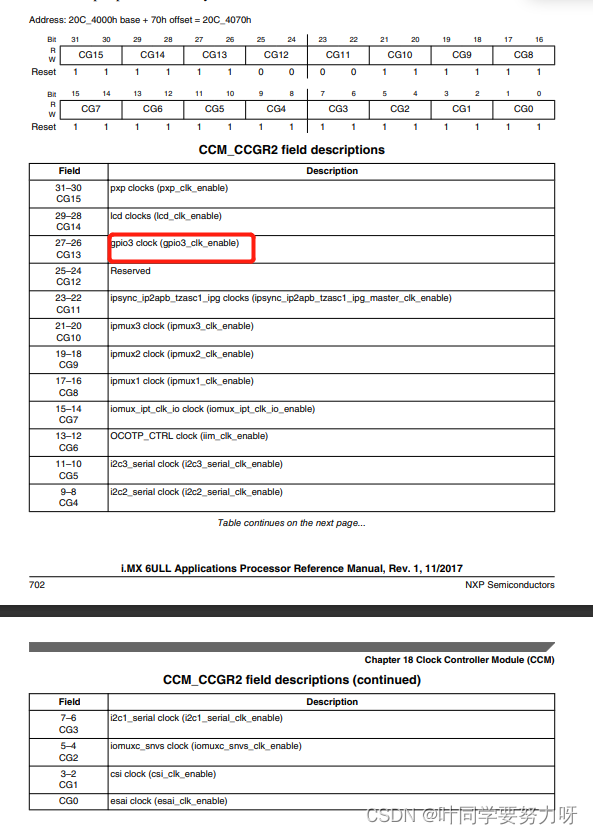
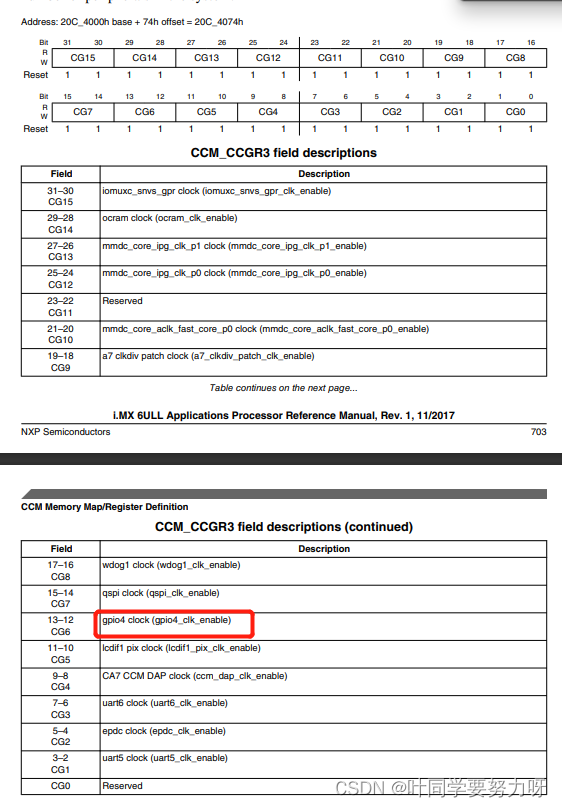
CCM_CCGR3主要对GPIO4进行控制。
CCM_CCGR3地址:0x020C4000 + 0x74
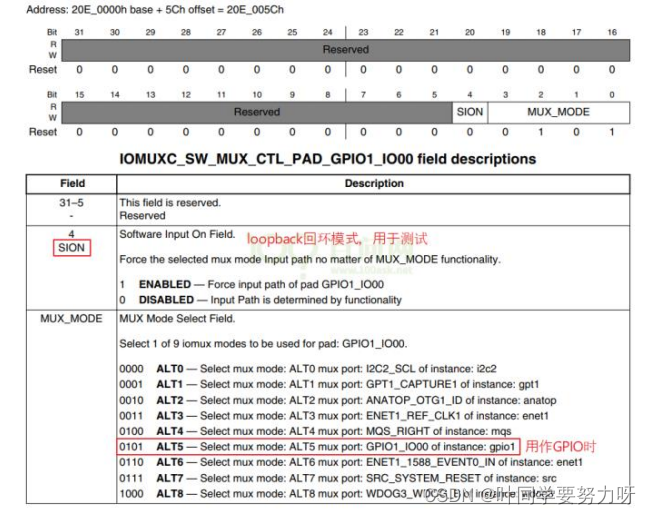
②引脚的模式
对于某个/某组引脚,主要通过IOMUXC对模式进行设置,而IOMUXC中有 2 个寄存器用来设置它:
IOMUXC_SW_MUX_CTL_PAD_ :Mux pad xxx,选择某个 pad 的功能
IOMUXC_SW_MUX_CTL_GRP_:Mux grp xxx,选择某组引脚的功能
某个引脚,或是某组预设的引脚,都有 8 个可选的模式
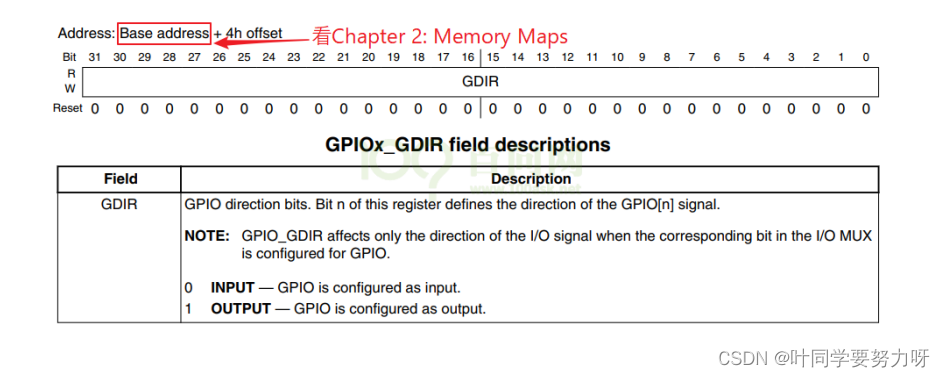
另外在GPIO的内部还有另外一个寄存器设置GPIO的方向是输入还是输出模式。即:GPIOx_GDIR寄存器
GPIOx_GDIR:设置引脚方向,每位对应一个引脚,1-output,0-input
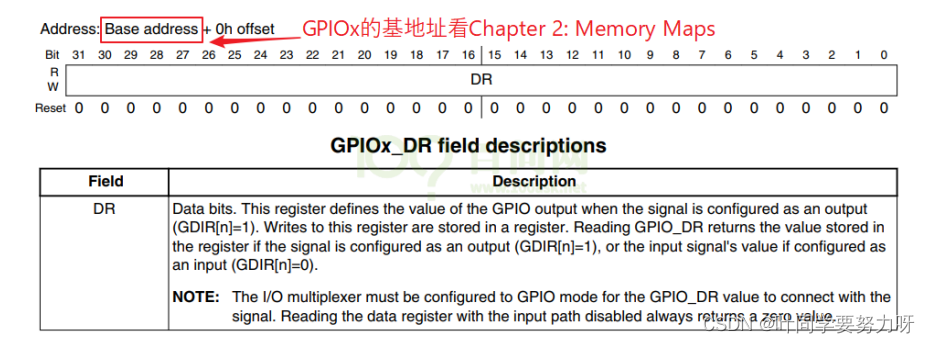
③设置输出引脚的电平
GPIOx_DR:设置输出引脚的电平,每位对应一个引脚,1-高电平,0-低电平
三、LED驱动程序
对于IMX6ULL的操作我们知道其控制引脚为GPIO5_3。
根据操作手册我们要对其CCM进行控制时钟、IOMUXC选择工作模式、GPIOx_GDIR选择是输入还是输出模式、GPIOx_DR进行控制引脚的高低电平。
查阅手册我们可知:
①GPIO5的时钟是默认打开的,因此我们不必重新设置CCM_CCGR1地址:0x020C4000 + 0x6C
②设置GPIO5_3为GPIO模式。根据手册:IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3地址:0x02290000 + 0x14
③LED是输出模块因此我们需的将GPIO5_GDIR设置成输出模式。
GPIO5_GDIR地址:0x020AC004
④设置引脚的高低电平。GPIO5_DR
GPIO5_DR地址:0x020AC000
知道这些就可编写LED的驱动程序了。
1、驱动程序
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/delay.h>
#include <linux/poll.h>
#include <linux/mutex.h>
#include <linux/wait.h>
#include <linux/uaccess.h>
#include <linux/device.h>
#include <asm/io.h>
static int major;
static struct class *led_class;
/* registers */
// IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 地址:0x02290000 + 0x14
static volatile unsigned int *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3;
// GPIO5_GDIR 地址:0x020AC004
static volatile unsigned int *GPIO5_GDIR;
//GPIO5_DR 地址:0x020AC000
static volatile unsigned int *GPIO5_DR;
static ssize_t led_write(struct file *filp, const char __user *buf,
size_t count, loff_t *ppos)
{
//long i;
char val;
int ret;
/* copy_from_user : get data from app */
ret = copy_from_user(&val, buf, 1);
/* to set gpio register: out 1/0 点亮led */
if (val==1)
{
/* set gpio to let led on */
*GPIO5_DR &= ~(1<<3);
}
else if(val==0)
{
/* set gpio to let led off 熄灭led*/
*GPIO5_DR |= (1<<3);
}
else if(val==2)
{
/* set gpio to let led off 闪烁led*/
*GPIO5_DR |= (1<<3);
mdelay(200);
*GPIO5_DR &= ~(1<<3);
mdelay(200);
*GPIO5_DR |= (1<<3);
mdelay(200);
*GPIO5_DR &= ~(1<<3);
mdelay(200);
*GPIO5_DR |= (1<<3);
mdelay(200);
*GPIO5_DR &= ~(1<<3);
mdelay(200);
*GPIO5_DR |= (1<<3);
mdelay(200);
*GPIO5_DR &= ~(1<<3);
mdelay(200);
*GPIO5_DR |= (1<<3);
mdelay(200);
}
return 1;
}
static int led_open(struct inode *inode, struct file *filp)
{
/* enable gpio5
* configure gpio5_io3 as gpio
* configure gpio5_io3 as output
*/
*IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 &= ~0xf;
*IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 |= 0x5;
*GPIO5_GDIR |= (1<<3);
return 0;
}
static struct file_operations led_fops = {
.owner = THIS_MODULE,
.write = led_write,
.open = led_open,
};
/* 入口函数 */
static int __init led_init(void)
{
printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);
major = register_chrdev(0, "100ask_led", &led_fops);
/* ioremap */
// IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 地址:0x02290000 + 0x14
IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3 = ioremap(0x02290000 + 0x14, 4);
// GPIO5_GDIR 地址:0x020AC004
GPIO5_GDIR = ioremap(0x020AC004, 4);
//GPIO5_DR 地址:0x020AC000
GPIO5_DR = ioremap(0x020AC000, 4);
led_class = class_create(THIS_MODULE, "myled");
device_create(led_class, NULL, MKDEV(major, 0), NULL, "myled"); /* /dev/myled */
return 0;
}
static void __exit led_exit(void)
{
iounmap(IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3);
iounmap(GPIO5_GDIR);
iounmap(GPIO5_DR);
device_destroy(led_class, MKDEV(major, 0));
class_destroy(led_class);
unregister_chrdev(major, "100ask_led");
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
2、main函数
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
#include <unistd.h>
#include <stdio.h>
// ledtest /dev/myled on
// ledtest /dev/myled off
int main(int argc, char **argv)
{
int fd;
char status = 0;
if (argc != 3)
{
printf("Usage: %s <dev> <on|off|yyy>\n", argv[0]);
printf(" eg: %s /dev/myled on\n", argv[0]);
printf(" eg: %s /dev/myled off\n", argv[0]);
printf(" eg: %s /dev/myled yyy\n", argv[0]);
return -1;
}
// open
fd = open(argv[1], O_RDWR);
if (fd < 0)
{
printf("can not open %s\n", argv[0]);
return -1;
}
// write
if (strcmp(argv[2], "on") == 0)
{
status = 1;
}
else if (strcmp(argv[2], "off") == 0)
{
status = 0;
}
else if (strcmp(argv[2], "yyy") == 0)
{
status = 2;
}
write(fd, &status, 1);
return 0;
}
3、Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMPILE)gcc -o ledtest ledtest.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
rm -f ledtest
obj-m += led_drv.o