Ŀ¼
���ݽ���
���Ľ�����ν�stm32���ư���Ϊһ��������ROS�ڵ��������������ROSϵͳ��
ǰ��
��һ�������Ļ�����Ӳ��ϵͳ��,�����ڶഫ�����ӿں�ʵʱ�Ե�����,���ɱ������Ҫ����Ƕ��ʽ������,���ڵĻ����˴��ʹ���˷ֲ�ʽROSϵͳ,����ϵͳ��Ҫ����linux����,����stm32Ϊ���Ĵ����Ƕ��ʽ��������֧��linux������,�����ػ���Ҫ��stm32�������ݽ���ʱ,ֻ������ROS��ϵ�����Զ���ͨѶЭ�顣
��ô,�ܲ�����STM32��ʹ��ROS�ܹ���,���ǿ϶���,ͨ��rosserialģ��,���ǿ���һ����ROS�Ľӿڶ�����ֲ��STM32�б���,��Ȼ����ʵ��������ROS��ֲ,���ǿ�������STM32��������Ϊһ��������ROS�ڵ���뵽ROSϵͳ��,ʵ����Ϣ�������շ��������ȹ��ܡ����Ľ����������ܸ�ʵ�ַ�����
����Ҫ��ֲ��stm32���Զ�����Ϣ�ͷ���
��ros�����ռ�catkin_ws��,���ǿ��Դ����Լ��İ�,����msg��srvĿ¼�м����Լ��������Ϣ�ͷ���,��Щ��Ϣ�ͷ�����STM32�빤�ػ�ͨѶʱ��Ҫ�õ���,��������������roslibsʱ,�ͻ��Զ�������Щ�Զ�����Ϣ�ͷ���
�������stm32����ֲ���roslibs
- ����rosserial_stm32��:�����Լ���ROS�����ռ�srcĿ¼,��~/catkin_ws/src,����
git clone https://github.com/yoneken/rosserial_stm32.git
- ����rosserial_stm32:��~/catkin_ws/Ŀ¼������
catkin_make�����¼���İ�,֮��ǵ�����source ~/.bashrcʹ�ñ���������Ч
cd ~/catkin_ws
catkin_make
source ~/.bashrc
- ���ɴ���ֲ��ͷ�ļ�:
�ڹ���Ŀ¼���½�һ���ļ���,����stm32_roslib,Ȼ�����stm32_roslib�½�һ��Inc�ļ���,����ĸIҪ��д����stm32_roslibĿ¼(����IncĿ¼)��ִ������:
cd ~
mkdir -p stm32_roslib/Inc
cd stm32_roslib
rosrun rosserial_stm32 make_libraries.py ./
�⽫��stm32_roslib/IncĿ¼������һ���ļ���,����ROS�Դ�����Ϣ�ͷ���,�Լ�catkin_ws�����а����Զ������Ϣ�ͷ���,����C++ͷ�ļ��ķ�ʽ����,����,��������ros.h��STM32Hardware.h��duration.cpp��time.cpp�ĸ��ļ��������������Ҫ��ֲ��stm32����Ŀ�л�ϱ�������ݡ�
ע��,������������Ҫ˵��:
- ����ros�汾�IJ�ͬ,��ִ��make_libraries.pyʱ���ܱ���
SyntaxError: Missing parentheses in call to 'print'. Did you mean print(__usage__)?,�������ڽű���python3ִ��,����python3�����print��Ҫ��(),������Ҫ��rosserial_stm32�������make_libraries.py�ļ�
cd ~/catkin_ws/src/rosserial_stm32/src/rosserial_stm32
vim make_libraries.py
��74�к͵�81��������print,�Ѻ�������ݼ������ż��ɡ�
# need correct inputs
if (len(sys.argv) < 2):
print (__usage__)
exit()
# get output path
path = sys.argv[1]
if path[-1] == "/":
path = path[0:-1]
print ("\nExporting to %s" % path)
- Inc�°�����Ŀ¼�ܶ�,���Dz�һ�����е���Ϣ�ͷ���������stm32��Ҫ�õ�,���������ɾ��һ����,����stm32��Ŀ������
��Mdk��ʵ��C��C++�����ϱ���
����һ�����ɵ�Inc�ļ���������������,����windowsϵͳ,��Inc�ļ��и��Ƶ�stm32��Mdk��Ŀ����,����,���Ƿ�����stm32_ros_lib/Inc�¡�������,��mdk,����stm32����Ŀ,�����������ɵ�Inc�����е�ͷ�ļ�����C++��д��,��������Ҫ����Mdk��c++���롣
һ��Ҫע��,�������Ϻܶ�����˵Ӧ�����ӨCcpp��mdk�ı�������,���Ҳ�����ô�����ƺܴ�,��Ϊ��������mdk����Ŀ�����ļ�������c++����������,��������Ŀ�����˵�����ģ��,��freertos�������VCP��,��Щc�ļ�������뱨����
��������õķ���Ӧ���Dz���mdk��c/c++��ϱ���ģʽ,��ΪĬ�������,mdk��ͨ���ļ���չ����ѡ���Ӧ�ı�����,.c�ļ�����c������,.cpp�ļ������c++������,��������Ӧ������cpp�ļ�,��������ROS�йص����ݶ�д��������cpp�ļ�(��rosserial_lib.cpp)��,Ȼ����ͷ�ļ�rosserial_lib.h�н�cpp�ĺ���������extern C��װһ��,����c�ļ��м���ʹ��#include rosserial_lib.h������cpp�ļ���������,����cpp�е�������c�ļ�����,�����������¼��ݵ�,�������跳�ա�
������˵,�����ۺ�freertos������ܹ��Լ�ROS�ڵ��whileѭ��д��,��ROS��ֲ������ݶ�����ͬһ��freertos�����С�
������rosserial_lib.h�ļ�:
#ifndef ROSSERIAL__H_
#define ROSSERIAL__H_
#ifdef __cplusplus
extern "C" {
#endif
void RosserialSetup(void);
void RosserialLoop(void);
#ifdef __cplusplus
}
#endif
#endif
�������Ƕ�������������,�ֱ��ǽڵ��ʼ������RosserialSetup(void)�ͽڵ�ѭ������RosserialLoop(void)
�����freertos������,���Ǵ�����һ��ControlTask������,�ڽ�������ѭ��ǰ��ִ�нڵ��ʼ������RosserialSetup(void),Ȼ��������ѭ����ִ��RosserialLoop(),ע�������ͨ��#include "rosserial_lib.h",������C++����RosserialSetup(void)��RosserialLoop(void),������ͷ�ļ��м�����extern "C",���ֵ��ñ������Dz��ᱨ���ġ�
#include "rosserial_lib.h"
void ControlTask(void *argument) {
osDelay(500);
RosserialSetup();
osDelay(500);
for(;;) {
RosserialLoop();
}
}
������,���ǽ��ܺͷ���rosserial_lib.cpp�������������ľ���ʵ�֡����´�����ʾ,����һ��stm32��ROS�ڵ�ľ���ʵ��ʾ��,ros.h��ros���ܵĺ���ͷ�ļ�,std_msgs/String.h��ros�Դ��ı���Ϣͷ�ļ�,ts_vision_ctrl/final_data.h���û��Զ�����Ϣͷ�ļ�,��Щ��������֮ǰ���ɵ�Inc�ļ����ڡ�
����д���ͱ�ROS�ڵ�����,ֻ�����Щ����,ͬ���Ƕ���nodehandle�ࡢ��Ϣ�շ����͡�������Ϣ�ص�����,�� RosserialSetup(void)�����н��нڵ��ʼ��,ע����Ҫ�շ�����Ϣ�ͷ���,��RosserialLoop(void)�����н��нڵ���Ϣ�ĸ��·���,��д��ؿ��ƴ���,���ִ��nh.spinOnce()����Ӧ���ֻص�����(���ﲻ����spin(),��������ѭ���ᱻ����)��ע������RosserialLoop()����������freertos����������ѭ����ִ��,����RosserialLoop()�����ڲ�������Ҫwhileѭ����
#include "rosserial_lib.h"
#include "cmsis_os.h"
#include <ros.h>
#include <std_msgs/String.h>
#include <ts_vision_ctrl/final_data.h>
void command_callback(const std_msgs::String &rxbuff);
ros::NodeHandle nh;
std_msgs::String stm32_to_pc_word;
ts_vision_ctrl::final_data my_data;
ros::Subscriber<std_msgs::String> cmd_sub("pc_to_stm32", command_callback);
ros::Publisher publisher("stm32_to_pc", &stm32_to_pc_word);
ros::Publisher my_pub("stm32_my_data", &my_data);
void command_callback(const std_msgs::String &rxbuff) {
stm32_to_pc_word = rxbuff;
publisher.publish(&stm32_to_pc_word);
}
void RosserialSetup(void) {
nh.initNode();
nh.advertise(publisher);
nh.advertise(my_pub);
nh.subscribe(cmd_sub);
my_data.heading = 3.5;
my_data.x = 1.23;
my_data.y = 2.56;
my_data.header.frame_id = "position";
my_data.header.seq = 0;
}
void RosserialLoop(void) {
static int i = 0;
my_data.header.seq = i;
i++;
my_pub.publish(&my_data);
nh.spinOnce();
osDelay(20);
}
��mdk����
��Mdk�궨���м���,__USE_C99_MATH,�������Ա���roslib�������
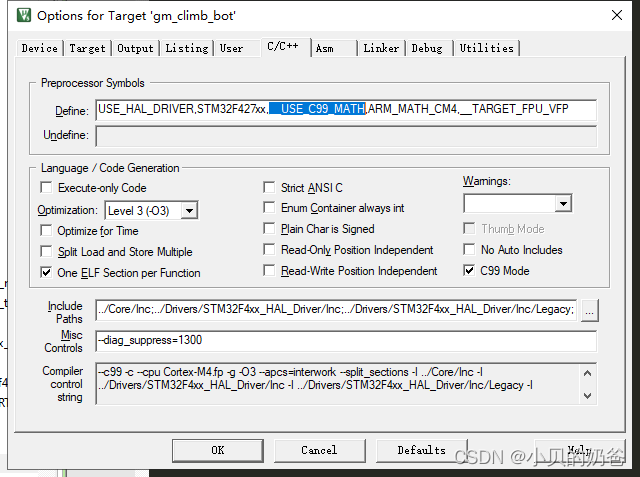
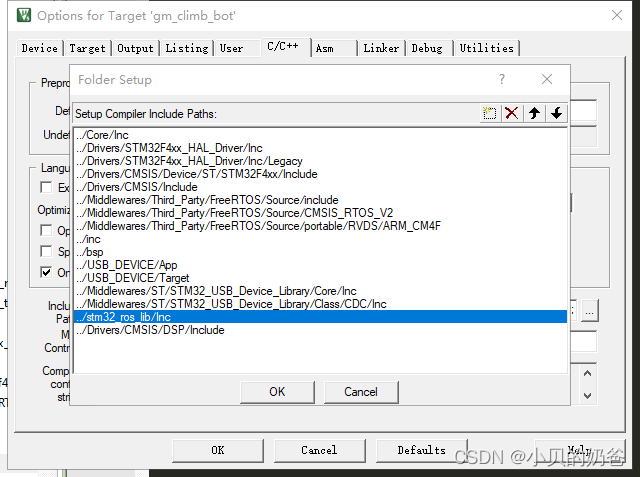
��include paths�м��롭/stm32_ros_lib/IncĿ¼
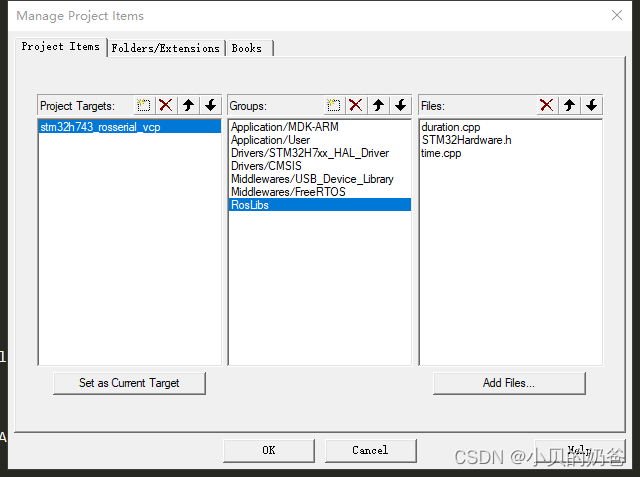
�����project��Ŀ�����Ҽ�,ѡ��Manage Project Items,��Groups�½�һ�����,��RosLibs,����������make_libraries.py����Inc�ļ����µ��ĸ��ļ�:ros.h��STM32Hardware.h��duration.cpp��time.cpp����ʵ����ͷ�ļ��Ӳ��Ӷ�����,����ֻ��Ҫ��STM32Hardware.h�����������ֲ��
��stm32 ROSͨѶ�ӿ�����
��STM32Hardware.h�ļ�,STM32Hardware.h�е���STM32Hardware����node_handle.h�е���
��Ҫ���������ʵ��read()��write()�Ĺ�������������ͺ�stm32��Ӳ���ӿ������,���������õ���rosserial,�������ォ�����stm32�Ĵ��������빤�ػ�����ͨѶ��
class STM32Hardware {
protected:
public:
STM32Hardware() {}
void init() {}
int read() {
if (Uart_Available()) {
return Uart_Read();
} else {
return -1;
}
}
void flush(void) {}
void write(uint8_t *data, int length) { Uart_Write(data, length); }
unsigned long time() { return HAL_GetTick(); }
protected:
};
������Ҫʵ����������,�ֱ���int read()�� void write(uint8_t *data, int length)�Լ�unsigned long time()������read��������ֵ��һ������,��ʵ��ÿ�ζ�ȡ������һ���ֽ�,write����ÿ�����Ƿ��ͳ���Ϊlength���ֽ����顣Ϊ��,���Ϊ��������һ�����ջ��λ�����,ÿ�δ��ڽ��յ�����,��д�뻷�λ�������read()�������ȵ���Uart_Available()����,�жϻ��λ������Ƿ�������,�����,��ͨ��Uart_Read()�����ӻ��λ�������ȡһ���ֽڲ���������ֽڡ�
����Ĵ�������Ļ��λ�����ʵ��,�����ο�,ʵ��Ӧ��ʱ,Ӧ���Ƕ������ȫ�ֱ�������ʱ���ܲ����ľ���ð������,�����ź�����ͬ�����ơ����ڴ������ݽ���д�뻷�λ�����,���ڴ����ж�����ʵ�ֵġ�
int Uart_Available(void) {
return ((uint32_t)(UART_RX_DATA_SIZE + uart_rxBufPtrIn - uart_rxBufPtrOut)) %
UART_RX_DATA_SIZE;
}
//�ӽ��ջ������ж�ȡ
int Uart_Read(void) {
// if the head isn't ahead of the tail, we don't have any characters
if (uart_rxBufPtrIn == uart_rxBufPtrOut) {
return -1;
} else {
unsigned char ch = uart_rxBuffer[uart_rxBufPtrOut];
uart_rxBufPtrOut = (uint16_t)(uart_rxBufPtrOut + 1) % UART_RX_DATA_SIZE;
return ch;
}
}
//ͨ��usb_vcp���ⷢ��
void Uart_Write(uint8_t *Buf, uint16_t Len) {
while (UART2_Transmit(Buf, Len) != HAL_OK) {
osDelay(1);
}
}
�����time()����,��Ҫ�ṩһ�����������ϵͳʱ��,һ�����ǵ�freertosϵͳ���Ķ���1ms,���ֱ�ӷ���HAL_GetTick()���� ,����������ص���32λ�ĺ������,��ʱʱ��ܳ�,���õ���������⡣
����
����,stm32ȫ����ROS��ֲ�������,��stm32��Ŀ���������,Ȼ�����Ӧ�Ĵ��ڽ��빤�ػ�,�ڹ��ػ���ִ��
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=115200
ע������ttyUSB0 Ҫ�ij�ʵ��ʶ��Ĵ�����,������ҲҪ��stm32�����õIJ�����ƥ�䡣���һ������,���Կ��������Ϣ
[INFO] [1661936312.766461]: ROS Serial Python Node
[INFO] [1661936312.784234]: Connecting to /dev/ttyUSB0 at 115200 baud
[INFO] [1661936314.895818]: Requesting topics...
[INFO] [1661936314.915546]: Note: publish buffer size is 1024 bytes
[INFO] [1661936315.080871]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1661936315.179145]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1661936316.061922]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1661936316.073155]: Note: subscribe buffer size is 1024 bytes
[INFO] [1661936316.077387]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
...
...
��ʱ,����stm32Ƕ��ʽϵͳ�Ѿ���Ϊһ��ROS�ڵ�������ROSϵͳ����,֮���´�һ���ն�,ִ��rostopic list,���Կ�����ص��շ���Ϣ
gm@controlboard:~$ rostopic list
/cmd_vel
/diagnostics
/imu
/odom
/rosout
/rosout_agg
/tf
����˵��
���������ǻ���stm32�ı�����ʵ��,����ʵ��ʹ��ʱ,����ROS���ݴ������ϴ�,�����ڵĴ���������,��˴������,���Ƕ�ʹ��STM32��usb�����VCP��ȡ��������,VCP��������ȫ�ܹ�����ROS�ij���������,��һƪ����,���ǽ���ϸ������ν���������ʵ��Rosserial���ܡ�