ǰ��
����STM32����28BYJ4�������,ʵ����ת��ת,��ɽǶȵ��������������һ�ֽ�������ת��Ϊ��λ�Ƶ�ִ�л��������������������յ�һ�������ź�,������������������趨�ķ���ת��------һ���̶��ĽǶ�(��������)������ͨ����������������ƽ�λ����,�Ӷ��ﵽȷ��λ��Ŀ��;ͬʱ����ͨ����������Ƶ�������Ƶ��ת�����ٶȺͼ��ٶ�,�Ӷ��ﵽ���ٵ�Ŀ�ġ�
һ���������
1. ��������
���������һ�ֽ��������ź�ת������Ӧ��λ�ƻ���λ�Ƶĵ綯����ÿ����һ�������ź�,ת�Ӿ�ת��һ���ǶȻ�ǰ��һ��,������Ľ�λ�ƻ���λ���������������������,ת��������Ƶ�ʳ����ȡ����,�����綯���ֳ�����綯����
������������ص�:
- ����ͨ�����������ź������п��Ƶġ�
- �������ת���Ƕ�������������������
- �����ת���������ź�Ƶ�ʾ�����
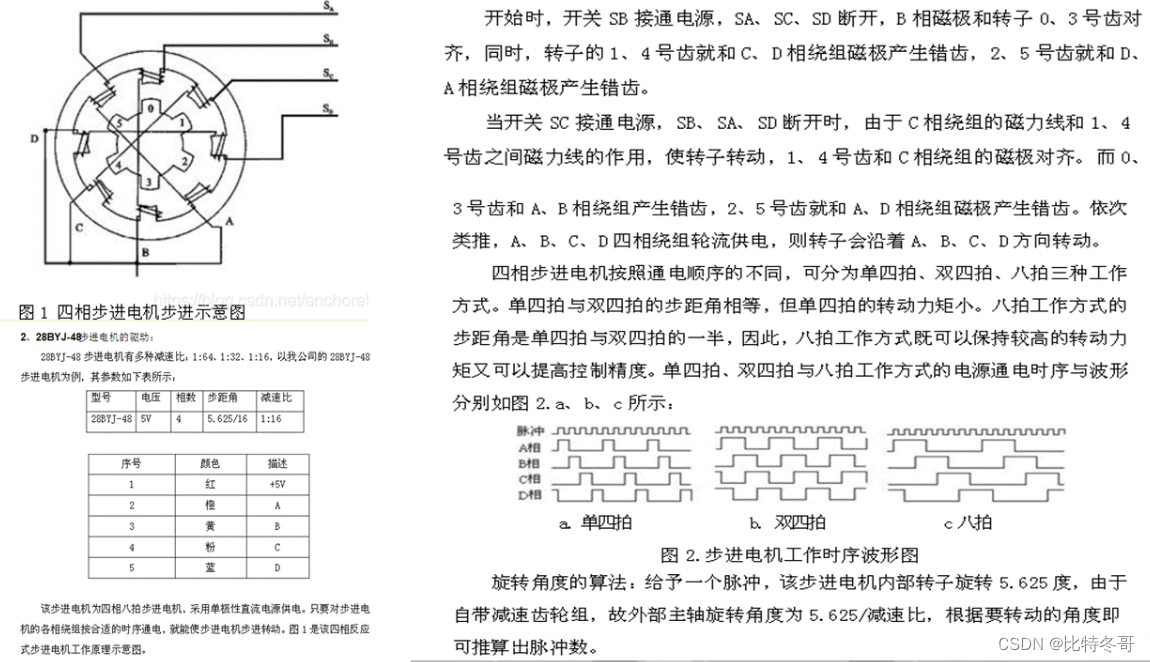
����:������ͬ�Լ�N��S�ų��ļ�����Ȧ����������m��ʾ��
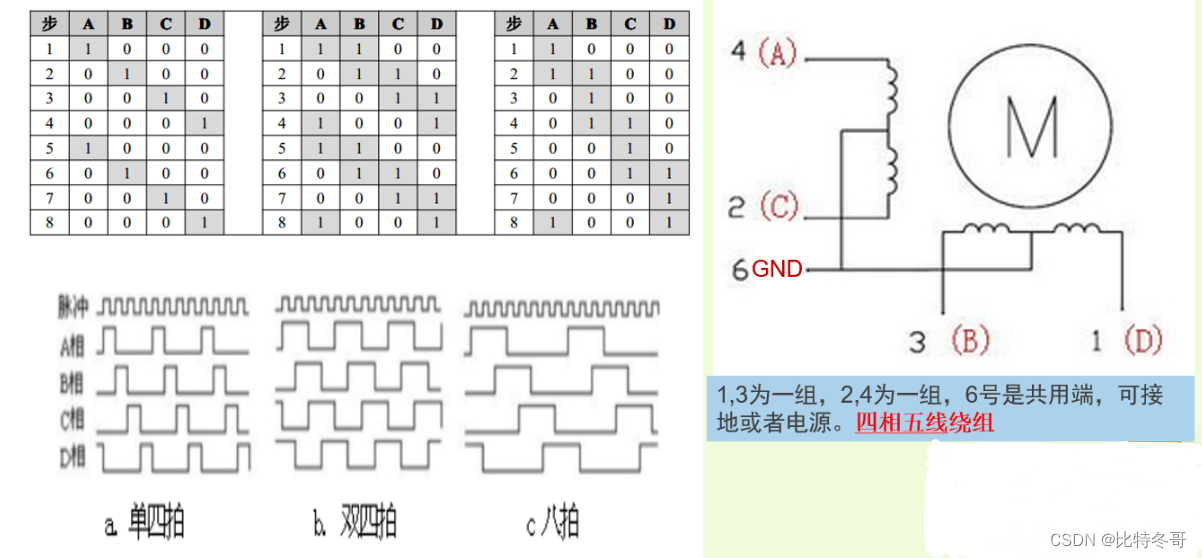
����:���һ���ų������Ա仯������������״̬��n��ʾ,��ָ���ת��һ���ݾ������������,��������Ϊ��,�������������з�ʽ��AB-BC-CD-DA-AB,����������з�ʽ��A-AB-B-BC-C-CD-D-DA-A��
�����:Ҳ�в�����,��Ӧһ�������ź�,���ת��ת���Ľ�λ����0��ʾ��0=360��/(ת�ӳ���J��������),�Գ����������,ת�ӳ�Ϊ50�ݵ��Ϊ������������ʱ�����Ϊ0=360��/(504) =1.8��(�׳�����),��������ʱ�����Ϊ0=360��/(50*8)=0.9��(�׳ư벽)��
����ת��:(HOLDING TORQUE)��ָ�������ͨ�絫û��ת��ʱ,������סת�ӵ����ء����Dz����������Ҫ�IJ���֮һ,ͨ����������ڵ���ʱ�����ؽӽ�����ת�ء�
��������Ƶ��:���������һ����������:��������Ƶ��,����������ڿ���������ܹ���������������Ƶ��,�������Ƶ�ʸ��ڸ�ֵ,���������������,���ܷ����������ת�����и��ص������,����Ƶ��Ӧ���͡����Ҫʹ����ﵽ����ת��,����Ƶ��Ӧ���м��ٹ���,������Ƶ�ʽϵ�,Ȼ��һ�����ٶ�������ϣ���ĸ�Ƶ(���ת�ٴӵ�����������)��
2. ����ṹ

ԭ��ͼ:
3. ����ԭ��
��������ģʽ:
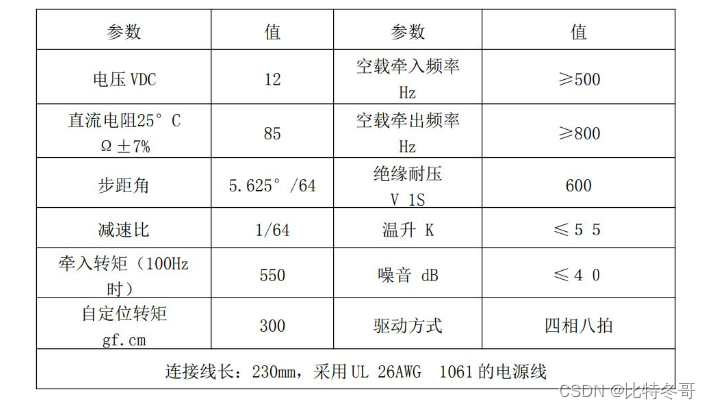
4. ��Ʒ����
1. ��������
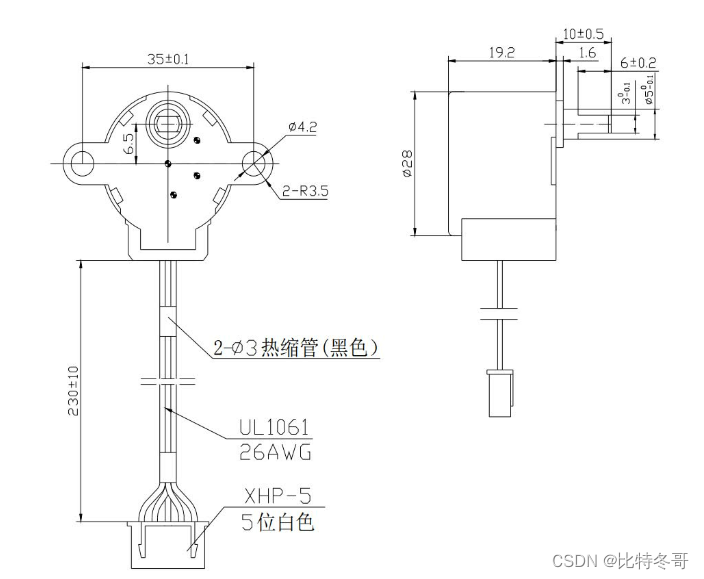
2. ���γߴ�(��λmm)
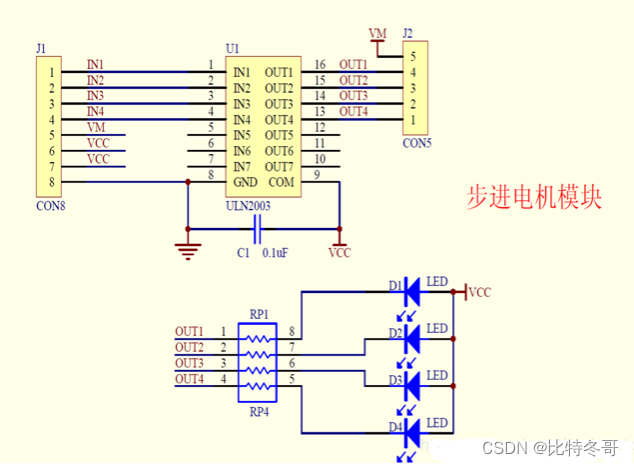
����ULN2003������
ULN2003������ĵ��������IC֮һ,��7�Դ��ֶپ���ܶԵ��������,ÿ���ܹ������ߴ�500mA��50V�ĸ��ء��ð���ʹ�����߶��е��Ķԡ�
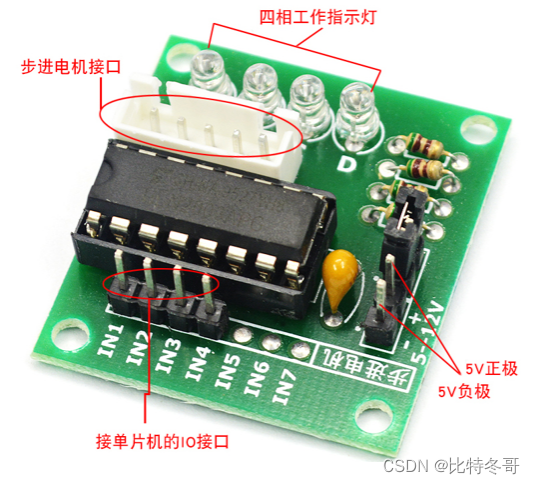
������:����������ƥ��綯���ĵ���,��ʹ�ý��綯���������ӵ����Ϸdz�����;���������ĸ���������������Լ���Դ���ӡ�
�ĸ�LED:���ĸ���������������ʾ�(��ָʾ����״̬),�����ڵ������ʱ�ṩ���õ��Ӿ�Ч����
ON / OFF����:���ڸ��벽������ĵ�Դ��
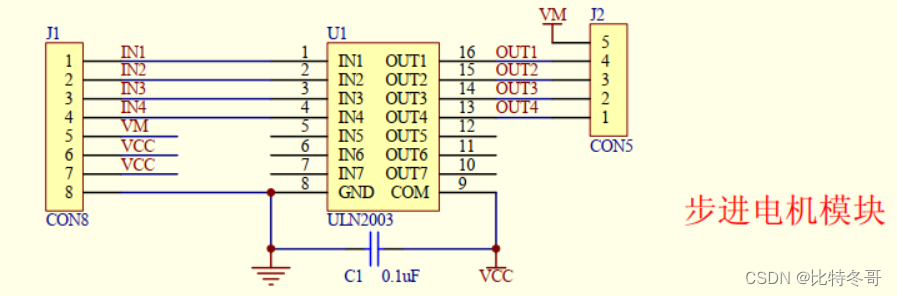
��������
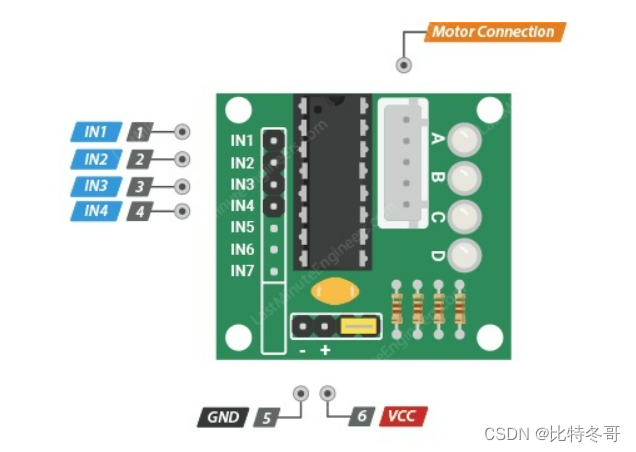
IN1 �C IN4��:���������綯�������������ӵ�stm32�ϵ�����������š�
GND:�dz����Ľӵ����š�
VCC:Ϊ�綯�����硣�������ӵ��ⲿ5V��Դ�����ڵ�����ĵĹ��ʹ���,�������ʹ��Arduino��5V��ԴΪ����������硣
�����ͷ:�������ĵط������������Ǵ�����,���ֻ����һ�ַ�ʽ���롣
ԭ��ͼ:
������������
motor
unsigned int Zz_flag = 0;
unsigned int Fz_flag = 0;
unsigned int Zz_Value = 0;
unsigned int Fz_Value = 0;
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
//GPIO_ResetBits(GPIOC,GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9);
}
void Motor_Zz(void)//��ת
{
Zz_Value = 1;
Fz_Value = 0;
}
void Motor_Fz(void)//��ת
{
Fz_Value = 1;
Zz_Value = 0;
}
void Motor_Stop(void)
{
Zz_Value = 0;
Fz_Value = 0;
Motor_A = 0;
Motor_B = 0;
Motor_C = 0;
Motor_D = 0;
}
void Motor_Zz_Function(void)
{
switch(Zz_flag)//����
{
case 0 : Motor_A = 1;Motor_B = 0;Motor_C = 0; Motor_D = 0;Zz_flag++;break;//A
case 1 : Motor_A = 1;Motor_B = 1;Motor_C = 0; Motor_D = 0;Zz_flag++;break;//AB
case 2 : Motor_A = 0;Motor_B = 1;Motor_C = 0; Motor_D = 0;Zz_flag++;break;//B
case 3 : Motor_A = 0;Motor_B = 1;Motor_C = 1; Motor_D = 0;Zz_flag++;break;//BC
case 4 : Motor_A = 0;Motor_B = 0;Motor_C = 1; Motor_D = 0;Zz_flag++;break;//C
case 5 : Motor_A = 0;Motor_B = 0;Motor_C = 1; Motor_D = 1;Zz_flag++;break;//CD
case 6 : Motor_A = 0;Motor_B = 0;Motor_C = 0; Motor_D = 1;Zz_flag++;break;//D
case 7 : Motor_A = 1;Motor_B = 0;Motor_C = 0; Motor_D = 1;Zz_flag = 0;break;//DA
default : break;
}
}
void Motor_Fz_Function(void)
{
switch(Fz_flag)
{
case 0 : Motor_A = 1;Motor_B = 0;Motor_C = 0; Motor_D = 1;Fz_flag++;break;//DA
case 1 : Motor_A = 0;Motor_B = 0;Motor_C = 0; Motor_D = 1;Fz_flag++;break;//D
case 2 : Motor_A = 0;Motor_B = 0;Motor_C = 1; Motor_D = 1;Fz_flag++;break;//CD
case 3 : Motor_A = 0;Motor_B = 0;Motor_C = 1; Motor_D = 0;Fz_flag++;break;//C
case 4 : Motor_A = 0;Motor_B = 1;Motor_C = 1; Motor_D = 0;Fz_flag++;break;//BC
case 5 : Motor_A = 0;Motor_B = 1;Motor_C = 0; Motor_D = 0;Fz_flag++;break;//B
case 6 : Motor_A = 1;Motor_B = 1;Motor_C = 0; Motor_D = 0;Fz_flag++;break;//AB
case 7 : Motor_A = 1;Motor_B = 0;Motor_C = 0; Motor_D = 0;Fz_flag=0;break;//A
default : break;
}
}
main
int main()
{
int key = 0;
int arr = 50;
int Motor_flag = 0;
TIM3_init(99,7199);
Motor_Init();
KEY_Init();
Motor_Zz();
while(1)
{
key = Get_Indepedent_Key_Value();
if(key)
{
switch(key)
{
case KEY0_BASE : arr += 10; TIM_SetAutoreload(TIM3,arr);break;
case KEY1_BASE : arr -= 10; TIM_SetAutoreload(TIM3,arr);break;
case KEY_UP_BASE : if(Motor_flag % 2 == 0) Motor_Fz(); else Motor_Zz(); Motor_flag++;break;
default : break;
}
}
}
}
����:https://pan.baidu.com/s/1vTNfv-bZMm_0QPPG7KuUQw?pwd=rqy2
��ȡ��:rqy2