OrangepiЪЕЪБадФмгХЛЏ
ЬсИпЪЕЪБадЕФЗНЗЈ
ЪзЯШ,БОШЫЪЙгУЕФЪЧ orangepi one (ОЭЯёЯТУцЕФвЛбљ) ЪЙгУЕФЪЧ LinuxЯЕЭГЁЃ

ЮвУЧЖМжЊЕР Linux ЯЕЭГВЂВЛЪЧгВЪЕЪБЯЕЭГ,гаЪБЯЕЭГЛсЯШДІРэвЛаЉЦфЫћЕФЪТЧщДгЖјднЛКДІРэгУЛЇЕФГЬађ,ЖјЮвзюНќЯыгУ orangepi one РДЕїЪд MPU6050,ЗЂЯжГЬађвЛжБЗЂЯжПЈПЈЕФ,ШчЙћЮвгУ stm32 РДДІРэЕБШЛШнвз, МИИіжаЖЯ,дйЗжХфвЛЯТгХЯШМЖЛљБООЭНтОіПЈЖйЕФЮЪЬтСЫ,ЕЋЪЧЯждкЪЙгУЕФЪЧLinuxЯЕЭГ,ЫљвдЮвОЭдкЭјЩЯЫбЫїШчКЮдіМг Linux ЯЕЭГЕФЪЕЪБадЁЃOrangepi ЕФЭЌРрВњЦЗЕБШЛОЭЪЧЪїнЎХЩРВ!гкЪЧЮвОЭдкЭјЩЯЫбЫї"ШчКЮЬсИпЪїнЎХЩЕФЪЕЪБад"ЁЃ
ИјГіЕФД№АИЪЧетбљЕФ
- ЕквЛжжЗНЗЈ:дк /boot/cmdline.txt зюКѓвЛааРяУцЬэМг isolcpus=xx(ФуЯывЊНћгУЕФКЫаФ) ШЛКѓАбФуашвЊЕФШЮЮёАВХХдкНћгУЕФКЫаФЩЯ,етбљФуЕФШЮЮёОЭАѓЖЈСЫвЛИіЖРСЂ CPU КЫаФЁЃвтЮЖзХетИі CPU КЫаФЛљБООЭжЛжДааФуетИіШЮЮёРВ,етбљОЭДяГЩСЫЬсИпЪЕЪБадЕФашЧѓЁЃ
- ЕкЖўжжЗНЗЈ:ДђФкКЫ RT ВЙЖЁЁЃОнЫЕЪЧетбљЕФ,ЫћУЧЬсЙЉвЛИізюЕзВуЕФОЋМђЕФЕїЖШЦї,ШЛКѓУПгавЛИіЪЕЪБШЮЮёЕФЪБКђ,ОЭЛсДђЖЯе§дкжДааЕФШЮЮёДгЖјзЊЯђжДааЪЕЪБШЮЮё,ШЛКѓжДааЭъГЩКѓ,ЦфЫћШЮЮёдйжДааЁЃ
- ЕкШ§жжЗНЗЈ:ЪЙгУwiringpiАќ,етИіАќМђЕЅРДЫЕОЭЪЧИФБфСЫЕБЧАНјГЬЕФЕїЖШВпТдМАгХЯШМЖЁЃЪЙгУ import wiringpi РДИјФуЕФ python ДњТыЬэМгетИіАќЁЃ
ЛљБОЩЯОЭЪЧвдЩЯетШ§жжЗНЗЈРДЬсИпЪЕЪБадСЫЁЃЦфЪЕАб,ЮвОѕЕУжЛгаЕквЛжжЗНЗЈФмЙЛзюДѓЯоЖШЕиЬсЩ§ГЬађЕФдЫаааЇТЪкРЁЃвђЮЊФуПДетПщаОЦЌЖМИјФуШУГівЛИіКЫаФСЫ,втЮЖзХФуЕФГЬађВЛашвЊКЭБ№ШЫЧРЗЙГдСЫ(КУвЎ!)
ДђФкКЫ RT ВЙЖЁЁЂЪЙгУ wiringpi Аќ НтОіПЈЖйЮЪЬт
вђЮЊЮвУЛгУЙ§,ЫљвдВЛаДетЖЮСЫ,ФуУЧПЩвдШЅПДПДЦфЫћВЉжїЕФЮФеТАЩ
ЪЙгУ ЁАisoclpus =xxЁБ НћгУКЫаФ НтОіПЈЖйЮЪЬт
ЪзЯШ,ШчЙћПДЙ§ orangepi ЕФгУЛЇжИФЯ,ФЧУДгІИУЖд orangepiEnv.txt ЮФМўВЛФАЩњ,вђЮЊПЊ i2c КЭ uart ЕФНгПкЖМЪЧвЊдкетИіЮФМўРяУцаДЩЯвЛЖЮНтЫјДњТыЕФ,ШЛКѓФуЕФАхзгОЭФмЙЛдкЬиЖЈЕФНгПкЪЖБ№ЕНЭтВПЩшБИСЫЁЃЮвЦ№ГѕвдЮЊетИіЮФМўвВПЩвдПижЦ CPU ЕФКЫаФЕїЖШ,гкЪЧЮвОЭдк orangepiEnv.txt ЮФМўЯТМгСЫвЛЖЮ isoclpus =3(0 ~ 3ЗжБ№ДњБэ1 ~ 4),етРяБэЪОЮвЯывЊНћгУ CPU ЕФКЫаФ4,ЕЋЪЧжиЦєКѓЗЂЯжУЛгУЁЁЃ👇👇ФуПДЯТУцЕФЭМ👇👇,ЫФИіКЫаФЖМгадкдЫааШЮЮёАЁ~ЁЃПДРД,ЪЇАмСЫЁЃ

ШЛКѓЮвОЭМЬајбАевНтОіАьЗЈ,дквЛЦЌВЉПЭЯТУцЗЂЯж,вЊдк boot ЮФМўМаЯТЕФ cmdline.txt жаМгЩЯ isoclpus = xx ВХФмЙЛГЩЙІНћгУКЫаФ!КУвЎ!ЮвСЂТэОЭШЅПД!ШЛКѓЗЂЯждкorangepi one ЕФ boot ЮФМўМаЯТВЂУЛга cmdline.txt ЮФМў,ЮвЗДИДПДСЫМИБщКѓШЗЖЈУЛгаетИіЮФМў👇

КѓУцОЙ§ЮвВЛаИЕФХЌСІ,жегкдк /proc ЮФМўМаЯТЗЂЯжСЫ cmdline ЮФМў,ЫфШЛУЛга .txt ЕФКѓзК,ЕЋЪЧгІИУВЛгАЯь,ШЛКѓЮвОЭжБНг,sudo vim cmdline,ШЛКѓдкзюКѓМгЩЯСЫ isoclpus = 3,КѓУцЗЂЯжБЃДцЪЇАмСЫ!👇👇ВЂЧвБЈДэетИі👇👇
E45: ЁЎreadonlyЁЏ option is set (add ! to override)
МьВщКѓЗЂЯжетИіЮФМўЪЧжЛЖСЕФ!УЛЙиЯЕЁЃЮвгУ sudo chmod a+w cmdline етЬѕгяОфИјЫћМгЩЯШЈЯо!ШЛКѓМЬај sudo vim cmdline,ЕЋЪЧвРОЩЪЇАмСЫ!👇👇ЫћЫЕетИі👇👇
ЁАcmdlineЁБ E667: Fsync failed
WARNING: Original file may be lost or damaged
donЁЏt quit the editor until the file is successfully written!
дРДетИіЮФМўЪЧИіПеЕФЮФМўАЁ!!!етИіЮФМўПЩФмвбОБЛЩОГ§СЫ!?
ЕЋЪЧ,вРОЩБ№ЩЫаФ!ЮвжБНгШЅЙйЭјПД!👇👇дк orangepi ЕФЙйЭјЮвЗЂЯжСЫетУДвЛЖЮЛАЁЃ👇👇
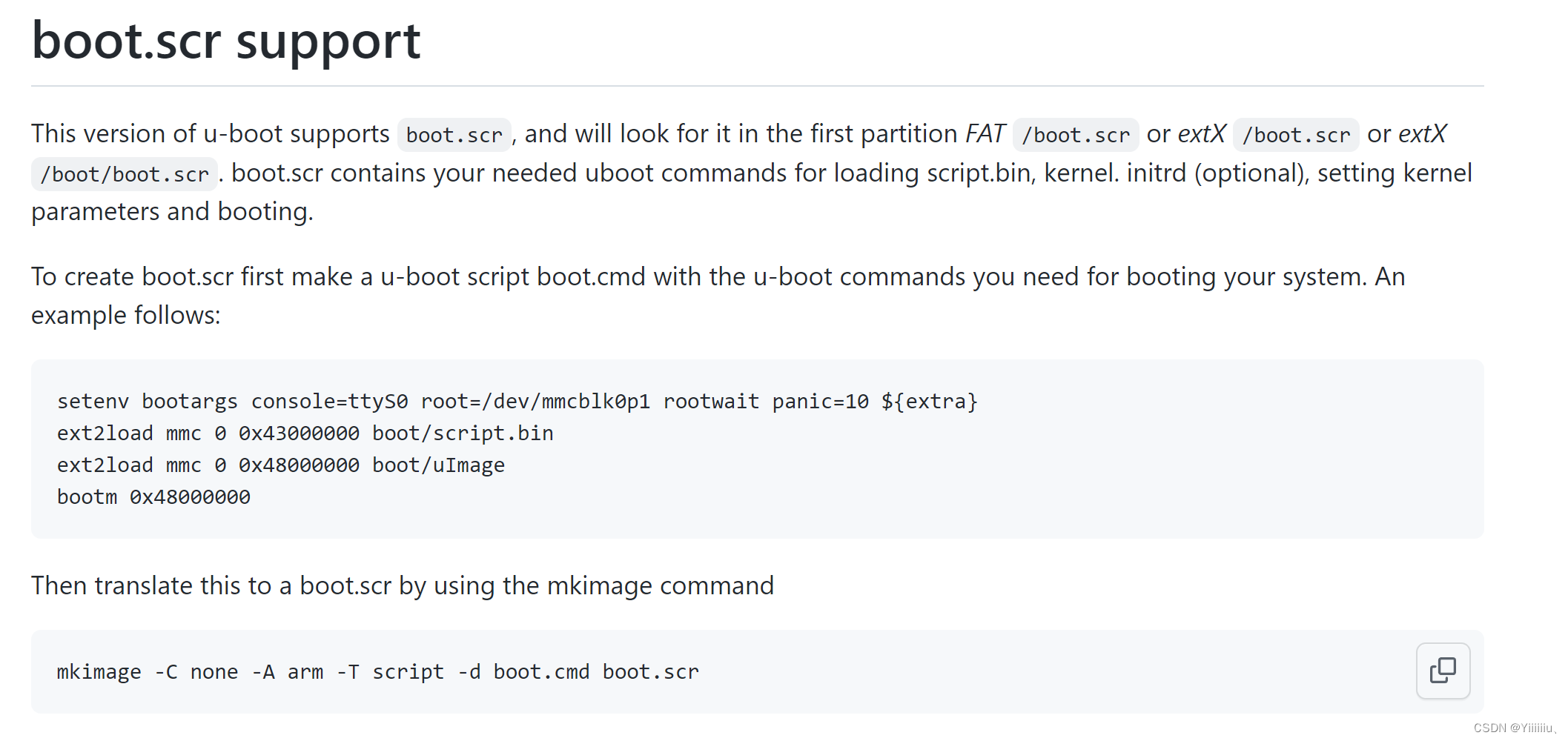
ЙйЗНЕФвтЫМДѓИХЪЧетбљЕФ,етИіАцБОЕФ uboot жЇГж boot.scr ,ЁАЭРАЭРНВвЛЖбЁ, ШЛКѓзюКѓвЛЖЮзюживЊЕФЛАЕФвтЫМЪЧ: boot.scr АќКЌСЫМгди script.binЁЂФкКЫЫљашЕФ uboot УќСюЁЃ initrd(ПЩбЁ),ЩшжУФкКЫВЮЪ§КЭв§ЕМЁЃ вВаэЮвУЧПЩвдНЋЮвУЧЕФ isoclpus = 3 ЗХНјШЅ?вВаэгагУ??ШУЮвУЧЪдвЛЯТАЩ!
ОЙ§ЮвЕФВЛЖЯЪдДэ,ЮвжБНгИцЫпФуУЧД№АИ:ЪзЯШФуЕУШЅ /boot ФПТМЯТ ШЛКѓФуУЧашвЊАб isolcpus = xx ЗХНј boot.cmd жаЕФ setenv bootargs ЕФШЮвтвЛИіЮЛжУРяЁЃ👇👇ОЭЯёЯТУцЕФвЛбљ👇👇ЁЃ
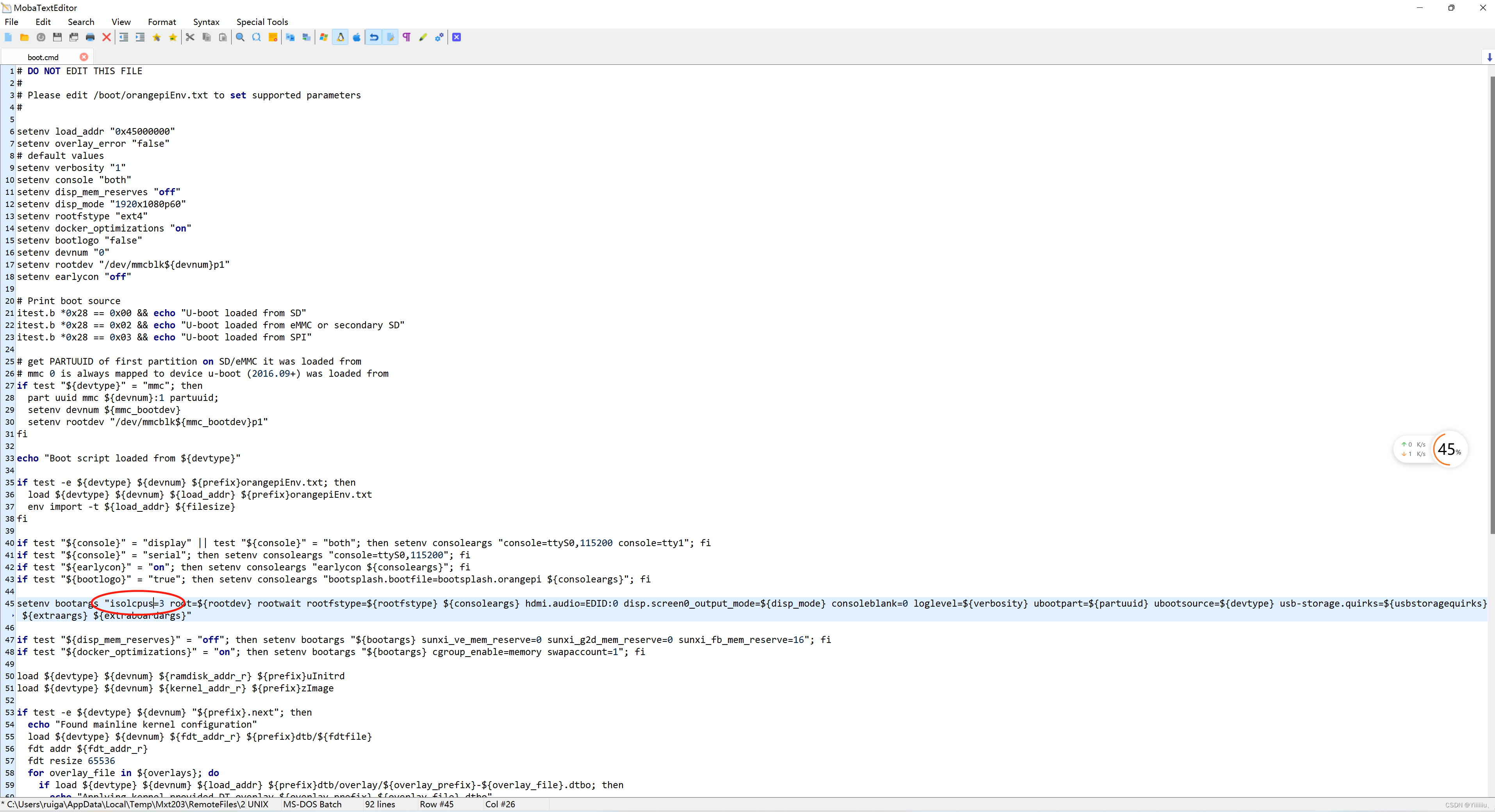
ШЛКѓКЭЙйЭјЕФВйзївЛбљ,дЫааетвЛЖЮЛАНјааБрвы!!ШЛКѓ reboot жиЦєПДПД
mkimage -C none -A arm -T script -d /boot/boot.cmd /boot/boot.scr
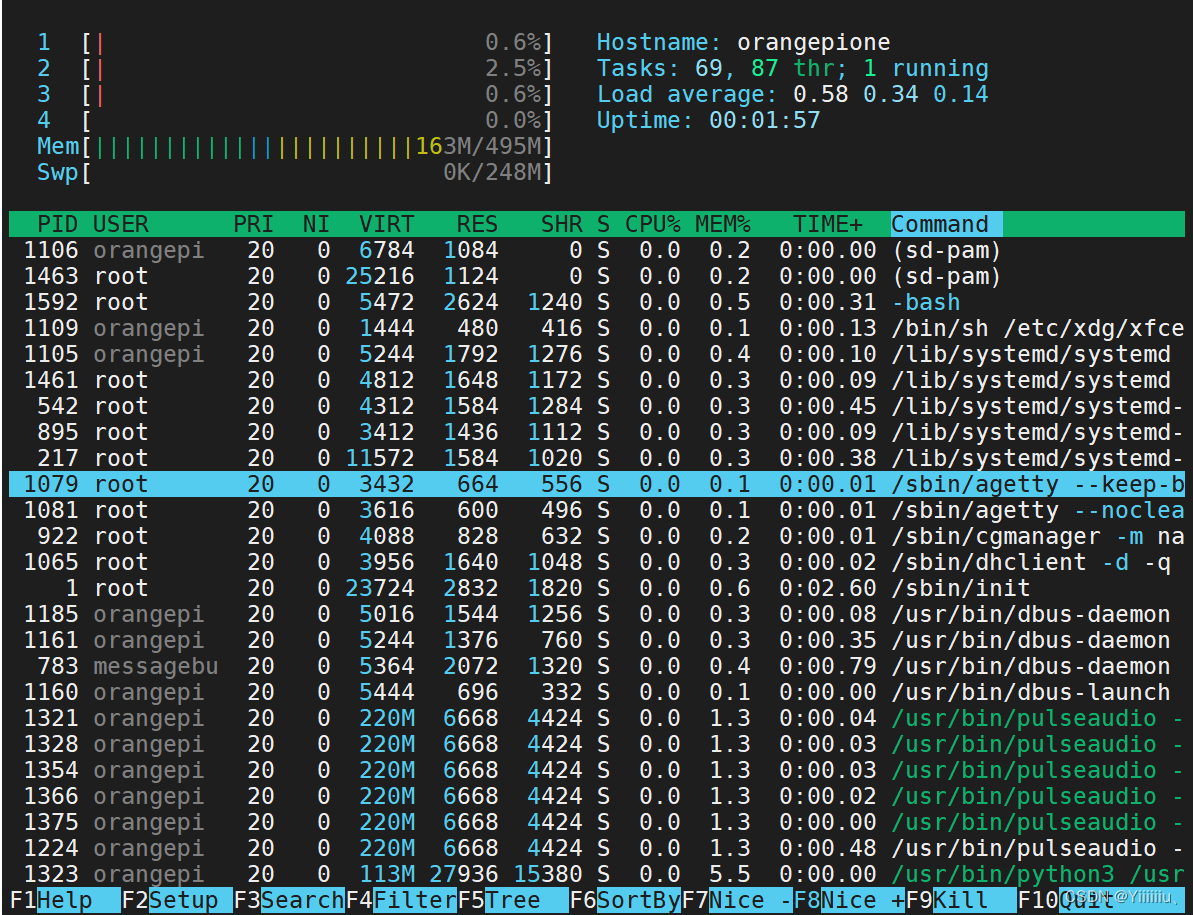
ОЊЯВ!!!КУЯёГЩЙІСЫ!ЮвАбЕкЫФИіКЫаФНћгУСЫ,ЙћШЛдк htop РяУцЕкЫФИіКЫаФУЛгаШЮЮёе§дкНјаа!!
ЮЪЬтНтЮі!
cmdline.txtЮЪЬт
ЪзЯШв§ЕМЗжЧјжаЕФЮФМў ЁАcmdline.txtЁБ(дкв§ЕМЯЕЭГжаЯдЪОЮЊЮФМўМа)ЪЧЪїнЎХЩЕФЖЋЮї,ЖјВЛЪЧlinuxЕФБъзМ(ИУЮФМўгЩ ЪїнЎХЩЕФв§ЕММгдиГЬађЖСШЁ,етЪЧЪїнЎХЩЕФАхзгЖРгаЕФ)ЁЃ Linux жаЕФЮФБОЮФМўУЛгаШЮКЮЁА.txtЁБРЉеЙУћЁЃ
аДШы /proc/cmdlline ЮФМўГіДэ
/proc/cmdline ЪЧгЩФкКЫДДНЈЕФжЛЖСКЭащФтЮФМў,гУгквдМђЕЅЕФЗНЪНгыгІгУГЬађЭЈаХЪ§Он,ОЭЯё /proc КЭ /sys жаЕФЫљгаЦфЫћФкШнвЛбљ,БрМЦїЮоЗЈЖСШЁЫќ,ЮвУЧвВЪЧЮоЗЈИќИФЫќЕФ!
ВЛЭЌЕФЩшБИгаВЛЭЌЕФЗНЪНРДЦєЖЏ Linux ЯЕЭГ,orangepi ЙйЗНЬсЙЉСЫЮФЕЕШУЮвЙлПД,ЗЂЯжАбЮвЕФУќСюЬэМгЕНboot.cmd,ШЛКѓжДааБрвыНЋЮФБОЮФМўзЊЛЛЮЊ boot.scr ЮФМўЁЃжиЦє,НтОі!
ЯТвЛНзЖЮОЭПЊЪМБраДГЬађВЂАбЫќЗХдкЕкЫФКЫаФЩЯдЫаа!ЪдвЛЯТЪЧВЛЪЧецЕФЪЕЪБ!!