J028 51��Ƭ������ͨ������_����+����+���潲��
����ͼproteus 7.8
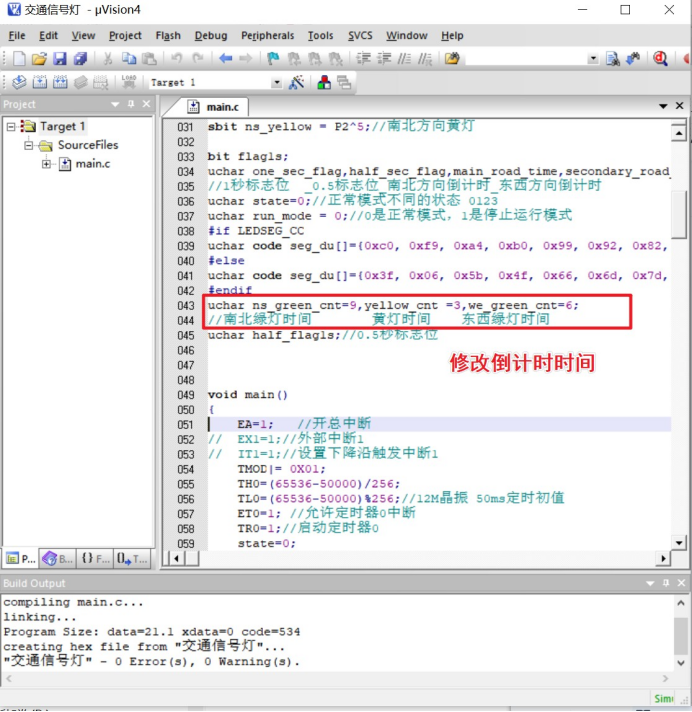
���������:keil 4/keil 5
�������:C����
51��Ƭ������ͨ�����������뽲��
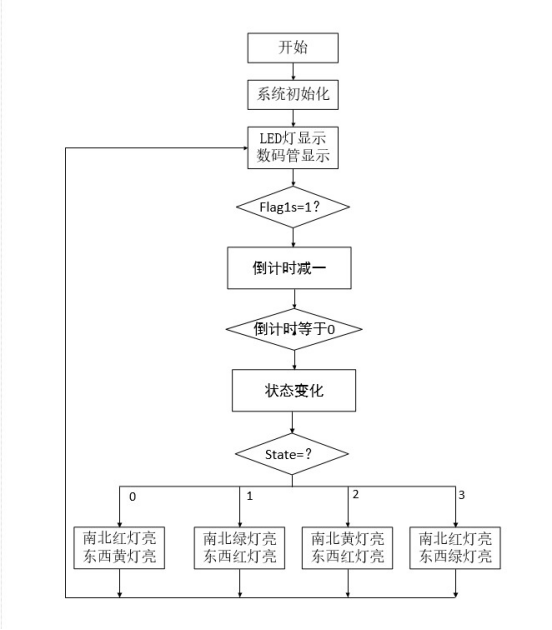
����״̬
״̬1:�ϱ������̵�ͨ��12��,������ƽ�ֹͨ��15��,�ֱ�ʱ;
״̬2:�ϱ�����Ƶ�����3��,����������Ƶ���ʱ;
״̬3:���������̵�ͨ��9��,�ϱ������ֹͨ��12��;
״̬4:��������Ƶ�����3��,�ϱ�������Ƶ���ʱ;
״̬5:ִ��״̬1,����ѭ����
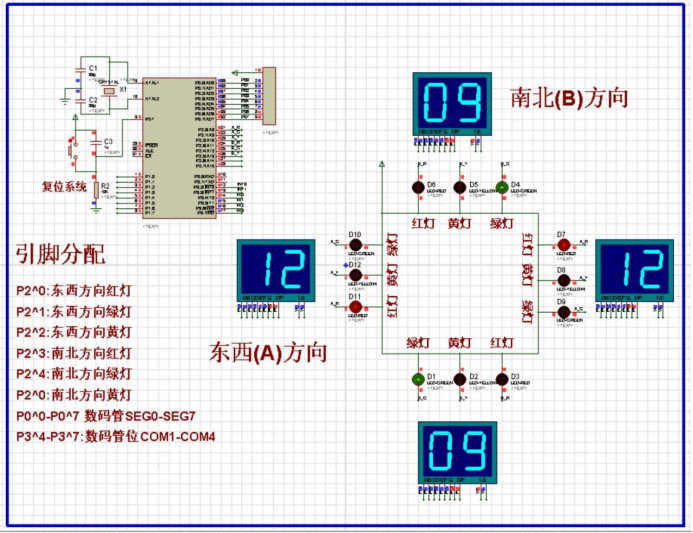
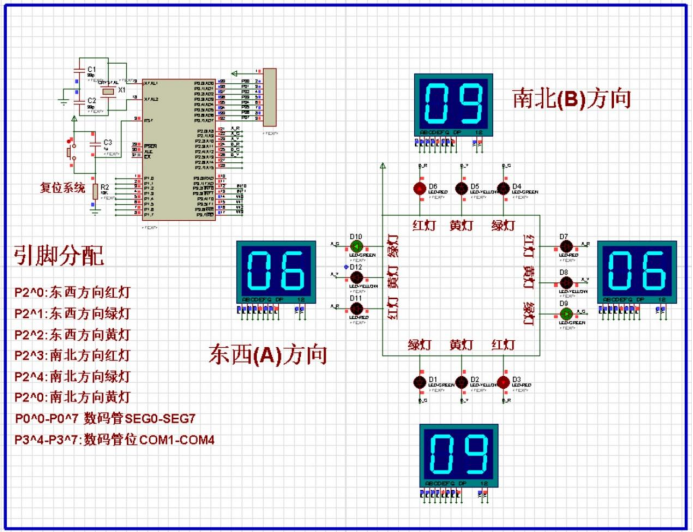
����ͼ
1.�ϱ������̵�ͨ��,����������
2.�ϱ�����Ƶ�ͨ��,����������
3.���������̵�ͨ��,�ϱ�������
4.��������Ƶ�ͨ��,�ϱ�������
�ϱ������̵�ͨ��
�ϱ�����Ƶ�ͨ��

���������̵�ͨ��
��������Ƶ�ͨ��

����
����
��Ҫ�ĺ��ĵ��ǵ���ʱ,��LED���������
����ʱ�IJ���
��ס�����Ϳ�����������ˡ�����Ҫ��ʱ�����,����ʱ��������?
һ��������Դ:
1,��ʱ
delay(1000ms);
ͨ����ѭ�������������������ﵽ��ʱЧ��,����ִ��Ч�ʼ���,����ȡ��
2,��ʱ
ͨ����ʱ������ʱ������������50ms����һ�ζ�ʱ�ж�,���ж�ִ�к�������������
EA=1; //�����ж�
// EX1=1;//�ⲿ�ж�1
// IT1=1;//�����½��ش����ж�1
TMOD|= 0X01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;//12M���� 50ms��ʱ��ֵ
ET0=1; //������ʱ��0�ж�
TR0=1;//������ʱ��0
state=0;
50msִ��һ���жϺ���,ͨ��one_sec_flag�ۼӵ�20�ж�ʱ���ȥ��һ�롣����һ���־λscan_flag��һ��
void Timer0() interrupt 1
{
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;//12M���� 50ms��ʱ��ֵ
if(++half_sec_flag>10){
half_sec_flag=0;
half_flag1s=1;
}
if(++one_sec_flag<20){
return;//��ǰ��������
}
one_sec_flag=0;
if(run_mode==0){//������������ʱ,�����̵���ֵ����һ
flag1s=1;
}
}
��������whileѭ�����жϱ�־λ,�����1,��ʱ����ֵ��һ,������˵���ʱ���������˼·
//LED���������ʾ,ʱ��ˢ��
if(flag1s)//һ��ִ��һ��
{
flag1s=0;
main_road_time--; //���̵Ƶ���ʱʱ���
secondary_road_time--;
}
����̵�״̬����
�������̵����з����ĸ�ģʽ
1.�ϱ������̵�ͨ��,����������
2.�ϱ�����Ƶ�ͨ��,����������
3.���������̵�ͨ��,�ϱ�������
4.��������Ƶ�ͨ��,�ϱ�������
5.ִ�е�һ��
if(main_road_time==0 || secondary_road_time==0)//�����ɵ����ߴθɵ�������0,�л�״̬��
//��һ�γ���ֻ�е���ʱΪ0��ִ��һ��,ִ����һ�ε���һ�ε���ʱΪ0����ִ��һ��
{
switch(state)//�ı���̵Ƶ�״̬
{
case 0:
{
state=1;//�´��л�����һ��ģʽ
main_road_time=ns_green_cnt;//���ɵ��̵�ͨ��ʱ��
secondary_road_time=ns_green_cnt+yellow_cnt;
we_red = ON;
we_yellow = OFF;
we_green = OFF;
ns_red = OFF;
ns_yellow = OFF;
ns_green = ON;
}break;
case 1:
{
state=2;
main_road_time = yellow_cnt;//���ɵ�ֱ�лƵ�ʱ��
we_red = ON;
we_yellow = OFF;
we_green = OFF;
ns_red = OFF;
ns_yellow = ON;
ns_green = OFF;
}break;
case 2:
{
state=3;
main_road_time=we_green_cnt+yellow_cnt;
secondary_road_time = we_green_cnt;
we_red = OFF;
we_yellow = OFF;
we_green = ON;
ns_red = ON;
ns_yellow = OFF;
ns_green = OFF;
}break;
case 3:
{
state=0;
secondary_road_time = yellow_cnt;
we_red = OFF;
we_yellow = ON;
we_green = OFF;
ns_red = ON;
ns_yellow = OFF;
ns_green = OFF;
}break;
default:break;
}
}
����ʱ��ʾ����
ʵ���ϵ���ʱ��ʾ������ʾns_road_time�C; we_road_time�C;��ƺ���ͨ������ֱܷ���ʾA�����ns_road_time��B�����we_road_time����
/*
���øú�����ʾ4λ�����
*/
seg_disp(main_road_time/10,0);//��ʾW0���Ƶ������ ʱ��ˢ��
seg_disp(main_road_time%10,1);//��ʾW1���Ƶ������
seg_disp(secondary_road_time/10,2);//��ʾW2���Ƶ������
seg_disp(secondary_road_time%10,3);//��ʾW3���Ƶ������
/*
����ܶ�̬��ʾ����
wei���������SEG0 1 2 3��λѡ
ѡ��λѡ,��ֵ��P0,���־���ʾ��ѡ�е�SEGλ����
*/
void seg_disp(uchar number,uchar wei) //����ܶ�̬��ʾ���� wei���������W0 W1 W2 W3��λѡ
{
#if LEDSEG_CC
P0=0;//����,��ֹ��Ӱ
W0=W1=W2=W3=0;
if(wei == 0){//��ʾ��һλ
W0=1;
P0=seg_du[number];
delay_ms(2);
W0=0;
}
if(wei == 1){//��ʾ�ڶ�λ
W1=1;
P0=seg_du[number];
delay_ms(2);
W1=0;
}
if(wei == 2){//��ʾ����λ
W2=1;
P0=seg_du[number];
delay_ms(2);
W2=0;
}
if(wei == 3){//��ʾ����λ
W3=1;
P0=seg_du[number];
delay_ms(2);
W3=0;
}
#else
P0=0;//����,��ֹ��Ӱ
W0=W1=W2=W3=1;
if(wei == 0){//��ʾ��һλ
W0=0;
P0=seg_du[number];
delay_ms(2);
W0=1;
}
if(wei == 1){//��ʾ�ڶ�λ
W1=0;
P0=seg_du[number];
delay_ms(2);
W1=1;
}
if(wei == 2){//��ʾ����λ
W2=0;
P0=seg_du[number];
delay_ms(2);
W2=1;
}
if(wei == 3){//��ʾ����λ
W3=0;
P0=seg_du[number];
delay_ms(2);
W3=1;
}
#endif
}
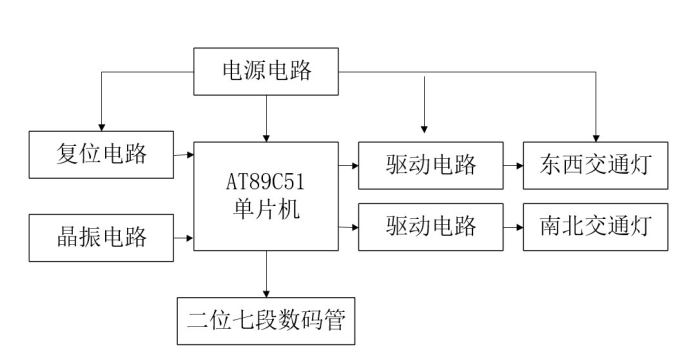
ϵͳӲ����ͼ
��Ʊ���

���ⱳ��
����ʱ���Ľ����ͷ�չ,��Ƭ�������Ѿ��ռ�������������������С���������,�Ѿ���Ϊһ�ֱȽϳ���ļ���������ͨ�ƿ���ϵͳ���õ�Ƭ��AT89C51��Ϊ����Ԫ��,ʵ����ͨ���źŵƶ�·��״�������ܿ��ơ���һ���̶��Ͻ���˽�ͨ·�ڶ���������ͣ���ȴ�ʱ�䲻����������ǿͨ�����⡣ϵͳ���нṹ���ɿ��Ըߡ��ɱ��͡�ʵʱ�Ժá���װά��������ŵ�,�й㷺��Ӧ��ǰ����
�������
�������Ҫ�ǽ����˵�Ƭ�������µĽ�ͨ�ƿ���ϵͳ,��ϸ��������Ӳ�����������,�����������ģ��������ϸ����,����Ҫ���ܺ�ָ������:
�������ϱ����ɵ�����ʮ��·��,���ɵ���һ��졢�̡�������ָʾ��,ָ�ӳ��������˰�ȫͨ�С��ϱ�����Ϊ���ɵ�,ͨ��ʱ��Ϊ12��;��������Ϊ֧�ɵ�,ͨ��ʱ��Ϊ9�롣ͨ��ʱ�����3��,�̵���,�Ƶ���˸,�Ƶ���˸��ϱ��ͨ�г�����ͨ��ʱ����������ʾ����ʾ��
�����嵥