提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
主控板STM32F302R8+驱动板X-NUCLEO-IHM07M1+直流减速电机37GB3530,实现电机的开环调速控制。区别于上两章节,本章节工具链采用STM32CubeMX+Matlab/Simulink+Keil,在STM32CubeMX中配置底层,在Matlab/Simulink写应用层,在Keil环境中写应用层与底层的代码接口,并完成程序的集成。
一、STM32F302R8+X-NUCLEO-IHM07M1直流电机的开环调速
1.1.功能需求
通过按键控制直流电机的转速,由于STM32F302R8控制器只有一个按键,因此只能单方向控制电机的加速或者减速,本次实验为加速实验,每按一次按键,电机的转速将增加。
1.2.硬件设计
控制板:STM32F302R8
驱动板:X-NUCLEO-IHM07M1
直流电机:37GB3530,额定功率10W,额定电压12V,额定电流0.3A
1.3.软件设计
1.3.1.底层配置
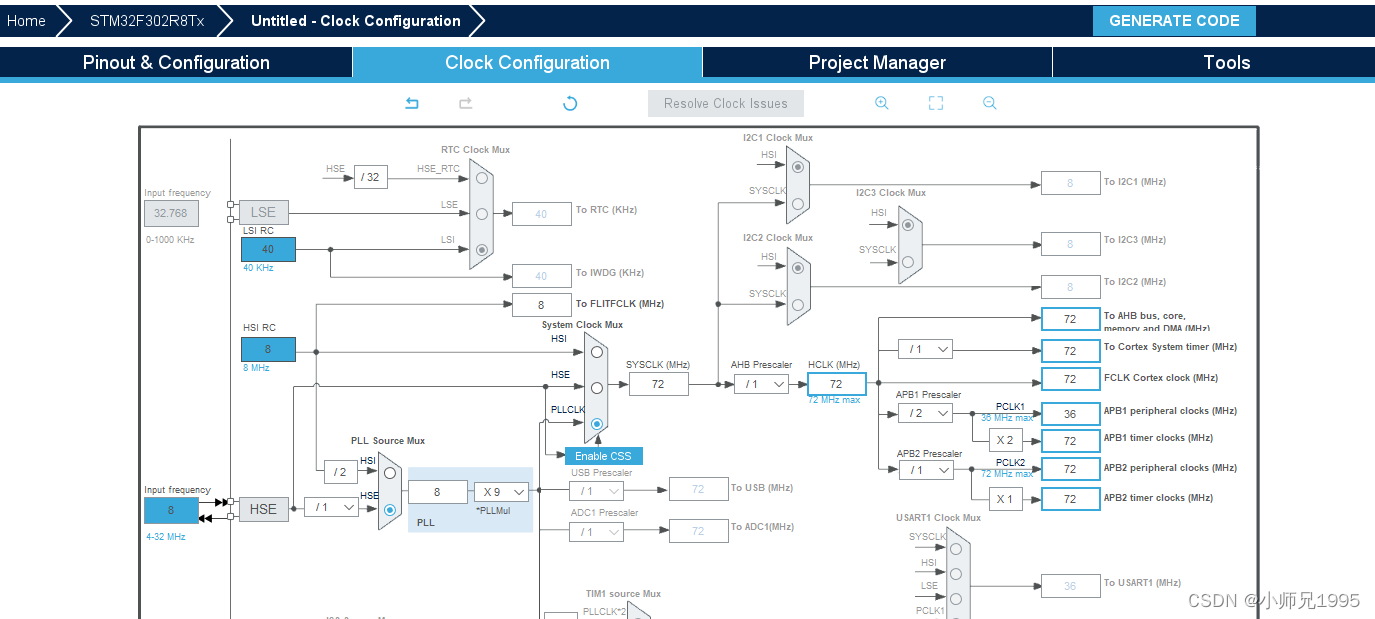
1、RCC设置为外部时钟,72MHz
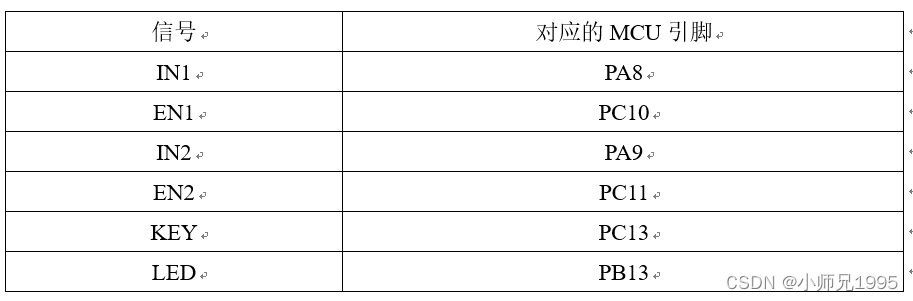
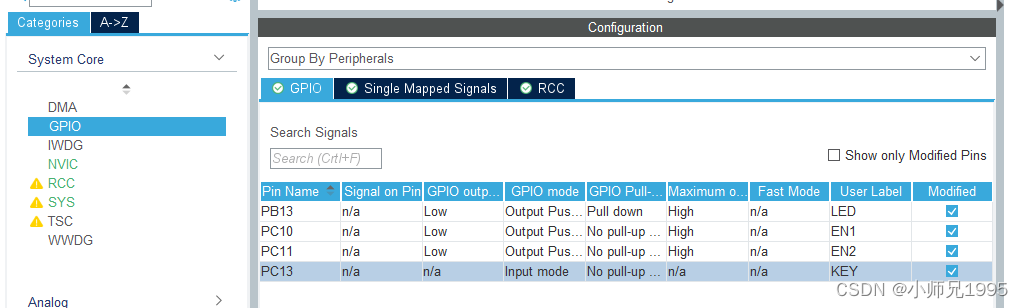
2、PC13设置为输入,无上下拉电阻;PC10,PC11设置为输出,无上下拉电阻,高速,初值为0;PB13设置为输出,下拉电阻,高速,初值为0
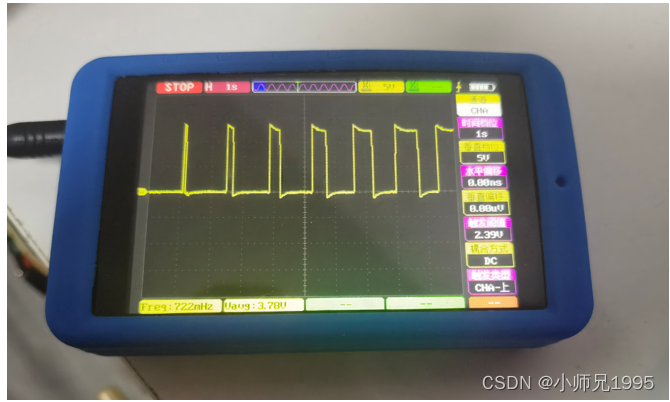
3、PA8设置为TIM1_CH1,PA9设置为TIM1_CH2;TIM1时钟源设置为内部时钟,两通道均设置为PWM输出;TIM1时钟分频值设置为36-1,向上计数,ARR设置为100-1,PWM输出的周期为1/(72000000/36)100=510^-5s,也即20KHz,其余值保持默认即可
4、IDE设置为Keil,在Keil环境中进行应用层编程
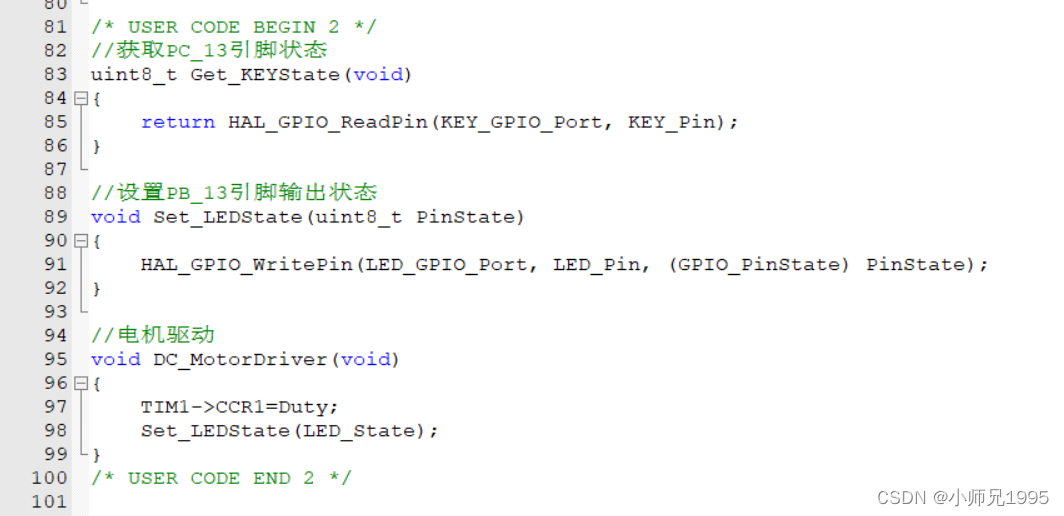
1.3.2.应用层与底层的接口开发
1.3.3.应用层开发
1.3.3.1.应用层开发
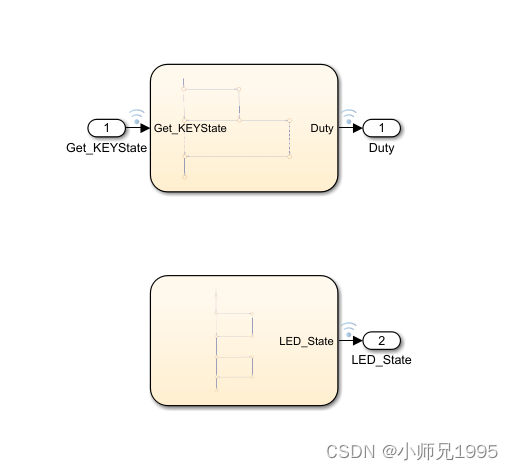
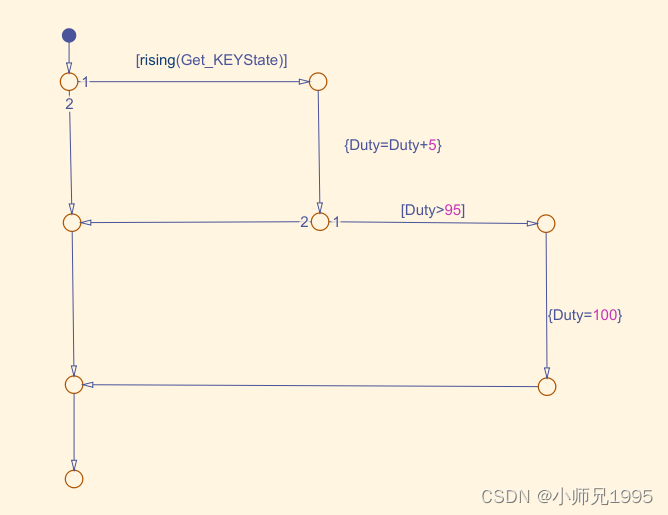
1.3.3.2.占空比设置
检测到按键按下,占空比增大
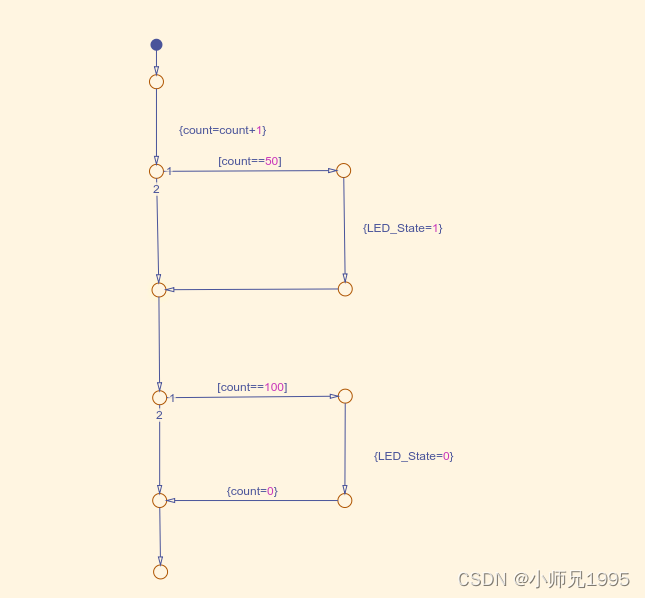
1.3.3.3.LED程序运行指示
LED灯指示程序运行,0.5s闪烁
1.3.3.4.仿真验证
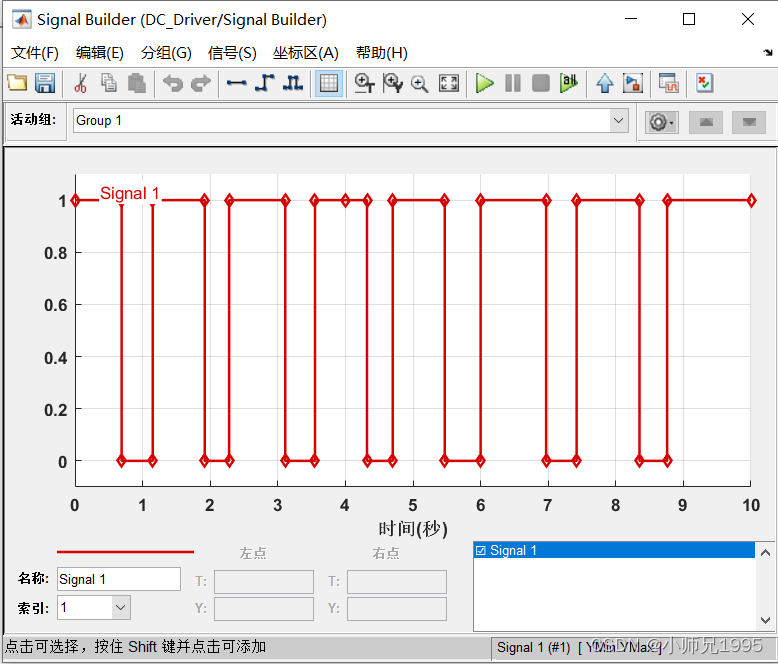
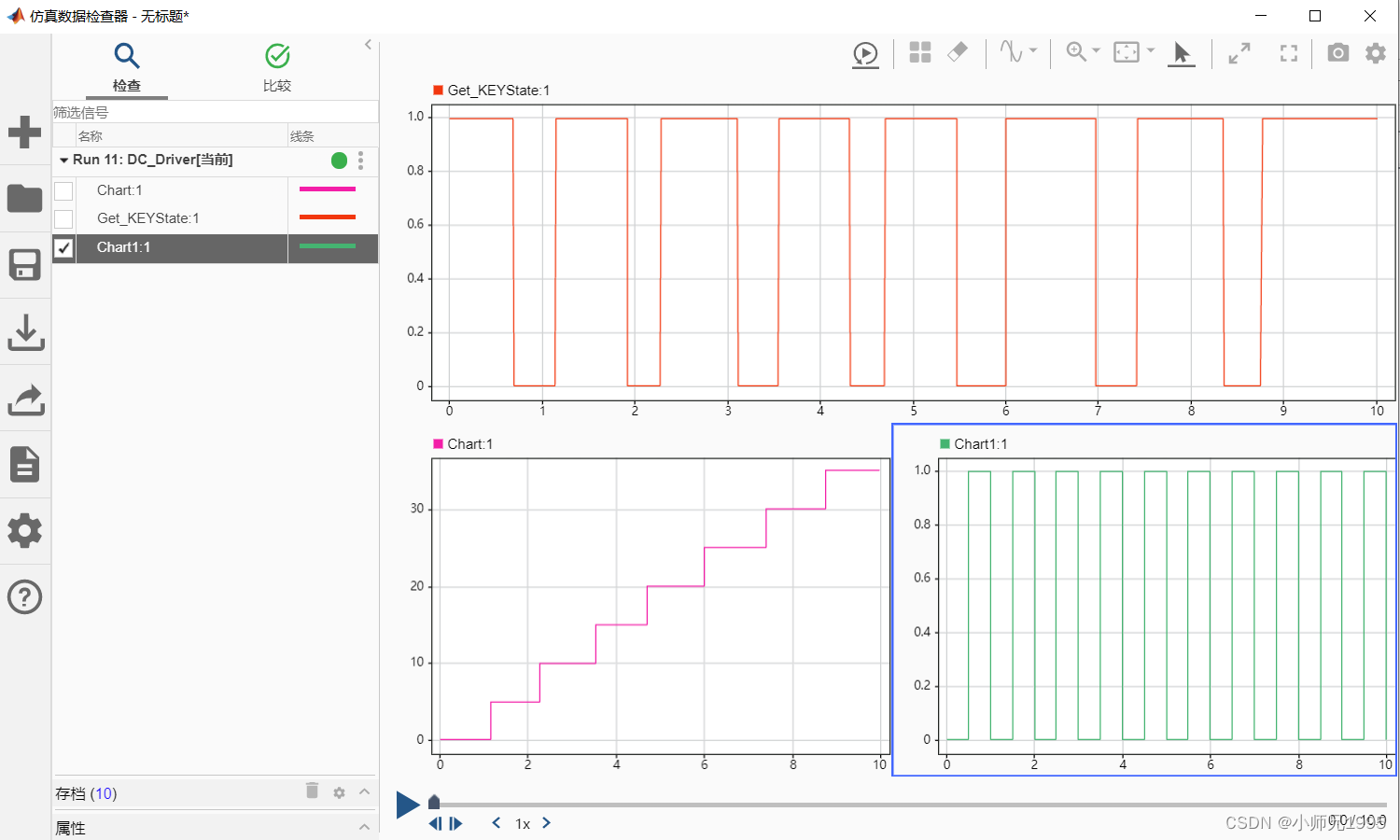
仿真结果符合自己的设计需求
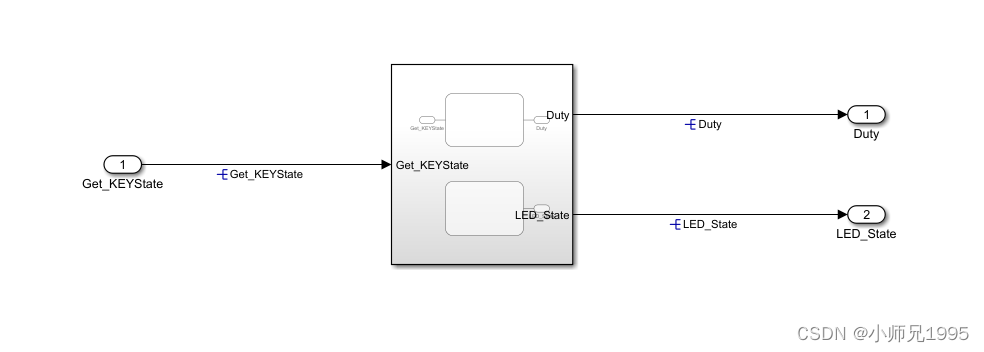
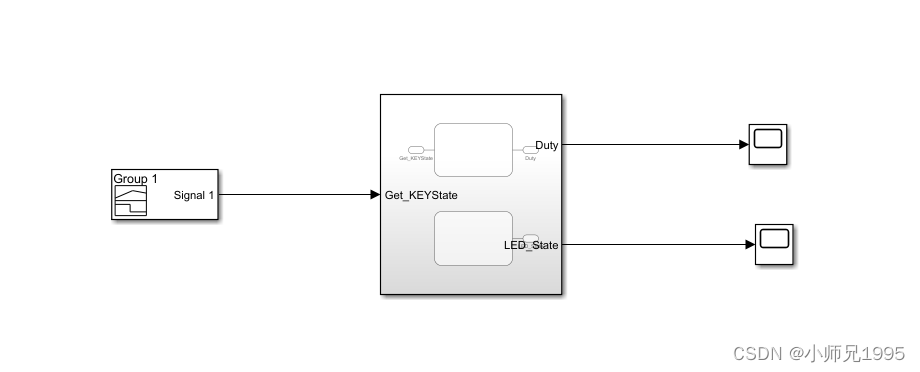
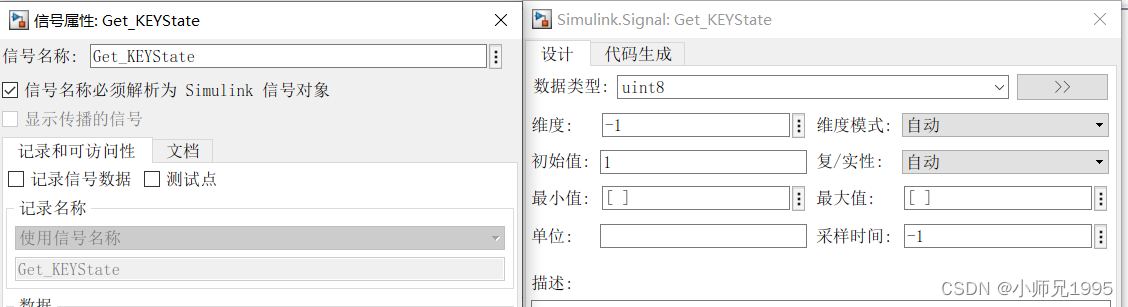
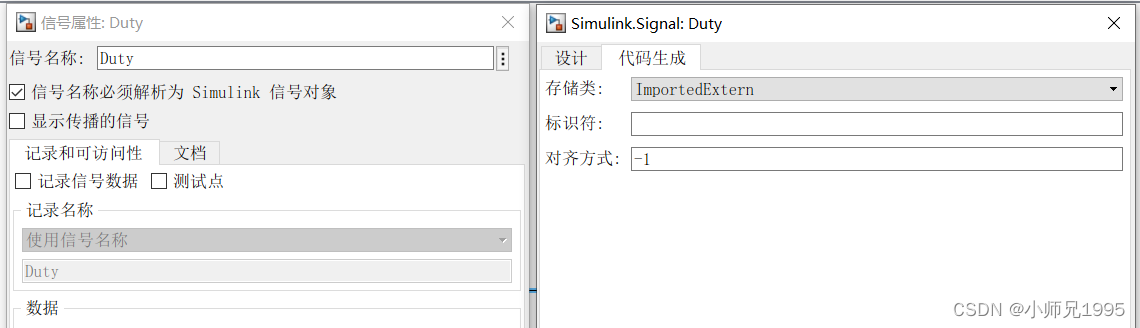
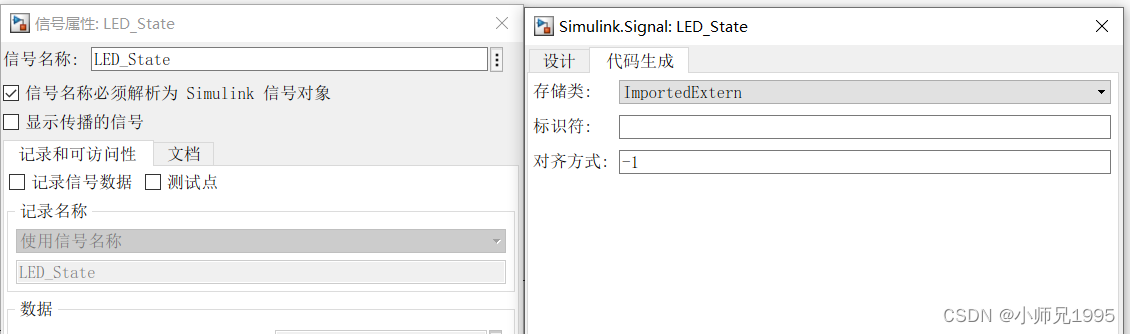
1.3.3.5.输入输出接口设置
根据底层的接口配置,设置输入输出的名称及信号类型,如下所示:
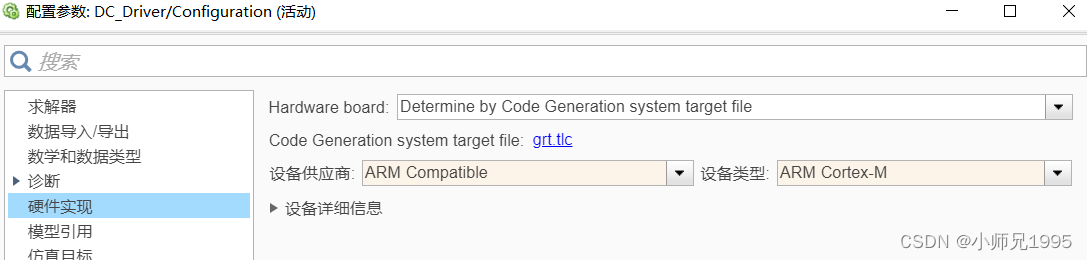
1.3.3.6.代码生成设置

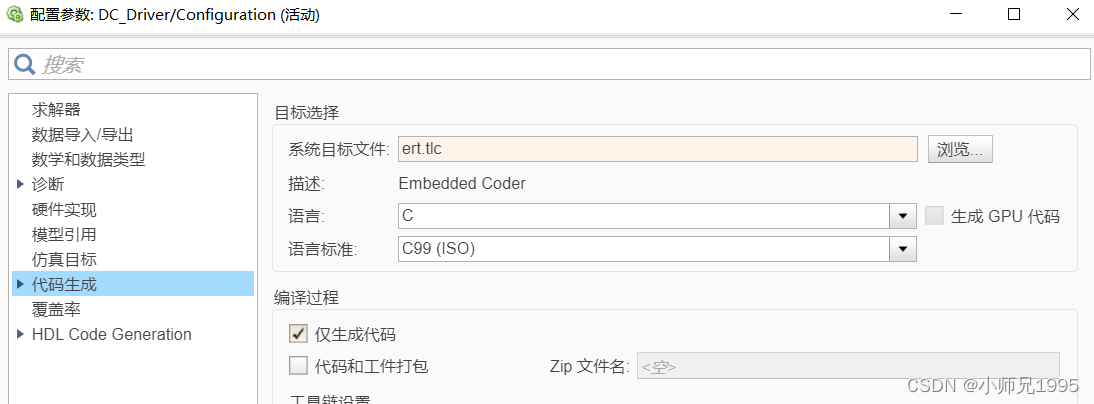

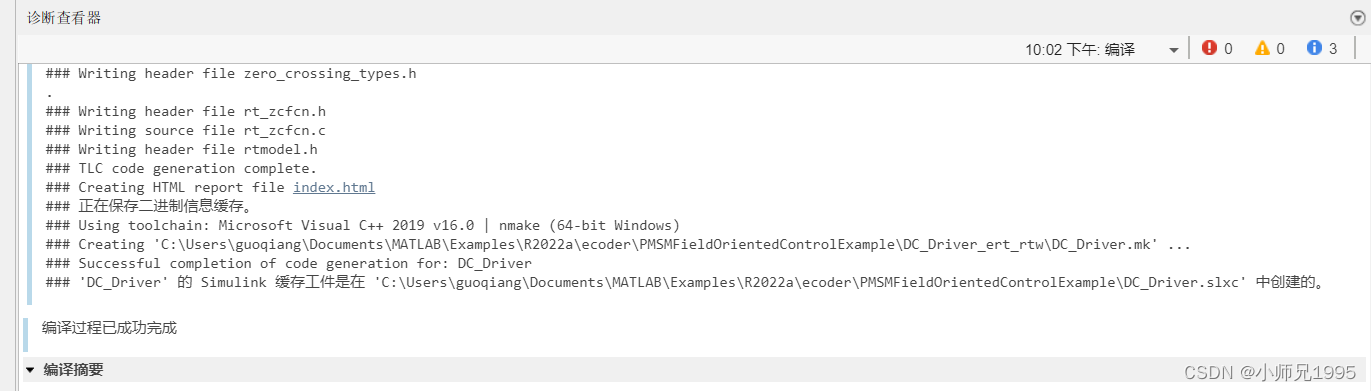
1.3.3.7.代码生成
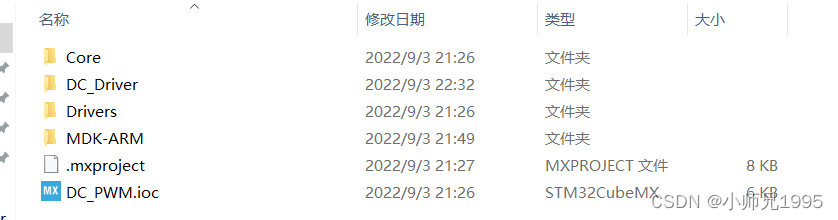
1.3.4.应用层与底层的代码集成
将Matlab生成的代码文件夹复制到底层生成的工程下:DC_Driver
在工程中将DC_Driver目录中的.c文件都添加进工程
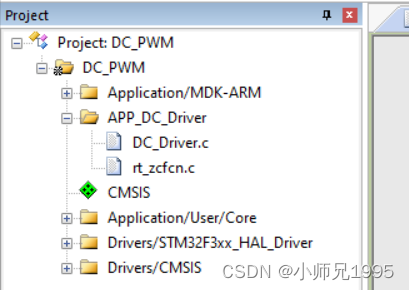
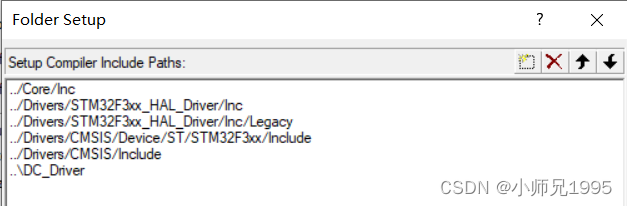
添加头文件路径
注:此时编译会报错,未定义“solver_zc.h”头文件,该头文件在Matlab安装路径下面,可以直接把该文件粘贴复制到DC_Driver文件夹下,也可以将该文件的路径进行添加。
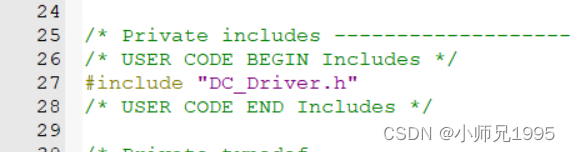
添加DC_Driver.h头文件
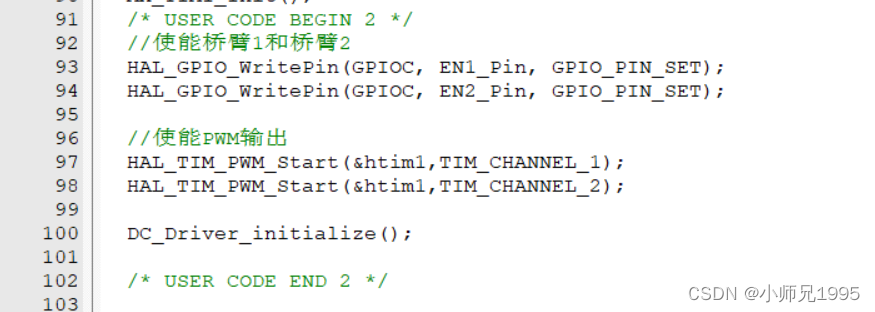
在主函数中调用DC_Driver_initialize()
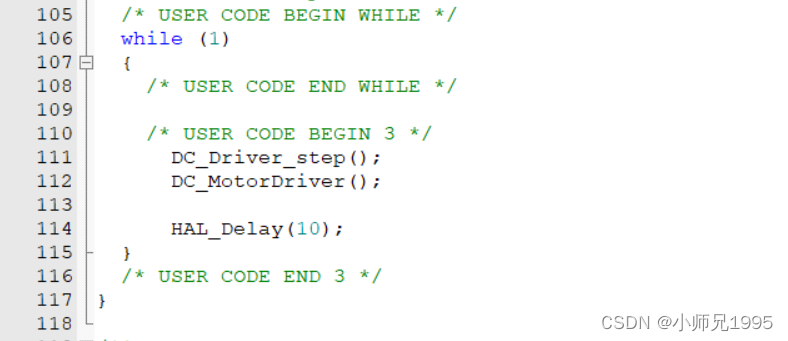
在While循环中调用DC_Driver_step(),根据DC_Driver_step()的运算结果进行电机驱动
注:调用DC_Driver_step()函数一次,相当于在Matlab中运行模型一次,Matlab中设置10ms模型运行一次,在工程中也要确保DC_Driver_step()10ms被调用一次
1.3.5.下载验证
编译下载到开发板,观察实验现象
总结
主控板STM32F302R8+驱动板X-NUCLEO-IHM07M1+直流减速电机37GB3530,实现电机的开环调速控制,工具链采用STM32CubeMX+Matlab/Simulink+Keil,为后续章节的分析奠定基础