文章目录
BCD 码
在日常生产生活中用的最多的数字是十进制数字,而单片机系统的所有数据本质上都是二进制的,所以聪明的前辈们就给我们创造了 BCD 码。
BCD 码(Binary-Coded Decimal)亦称二进码十进制数或二-十进制代码。用 4 位二进制数来表示 1 位十进制数中的 0~9 这 10 个数字。是一种二进制的数字编码形式,用二进制编码的十进制代码。BCD 码这种编码形式利用了四个位元来储存一个十进制的数码,使二进制和十进制之间的转换得以快捷的进行。我们前边讲过十六进制和二进制本质上是一回事,十六进制仅仅是二进制的一种缩写形式而已。而十进制的一位数字,从 0 到 9,最大的数字就是9,再加 1 就要进位,所以用 4 位二进制表示十进制,就是从 0b0000 到 0b1001,不存在 0b1010、0b1011、0b1100、0b1101、0b1110、0b1111 这 6 个数字。BCD 码如果到了 0b1001,再加 1的话,数字就变成 0b00010000 这样了,相当于用了 8 位的二进制数字表示了 2 位的十进制数字。
1. SPI 时序
UART、I2C 和 SPI 是单片机系统中最常用的三种通信协议。前边我们已经学了 UART 和 I2C 通信协议,现在我们来学习剩下的 SPI 通信协议。
SPI 是英语 Serial Peripheral Interface 的缩写,顾名思义就是串行外围设备接口。SPI 是一种高速的、全双工、同步通信总线,标准的 SPI 也仅仅使用 4 个引脚,常用于单片机和EEPROM、FLASH、实时时钟、数字信号处理器等器件的通信。SPI 通信原理比 I2C 要简单,它主要是主从方式通信,这种模式通常只有一个主机和一个或者多个从机,标准的 SPI 是 4根线,分别是 SSEL(片选,也写作 SCS)、SCLK(时钟,也写作 SCK)、MOSI(主机输出从机输入 Master Output/Slave Input)和 MISO(主机输入从机输出 Master Input/Slave Output)。
- SSEL:从设备片选使能信号。如果从设备是低电平使能的话,当拉低这个引脚后,从设备就会被选中,主机和这个被选中的从机进行通信。
- SCLK:时钟信号,由主机产生,和 I2C 通信的 SCL 有点类似。
- MOSI:主机给从机发送指令或者数据的通道。
- MISO:主机读取从机的状态或者数据的通道。
在某些情况下,我们也可以用 3 根线的 SPI 或者 2 根线的 SPI 进行通信。比如主机只给从机发送命令,从机不需要回复数据的时候,那么 MISO 就可以不要;而在主机只读取从机的数据,不需要给从机发送指令的时候,那 MOSI 就可以不要;当一个主机一个从机的时候,从机的片选有时可以固定为有效电平而一直处于使能状态,那么 SSEL 就可以不要;此时如果再加上主机只给从机发送数据,那么 SSEL 和 MISO 都可以不要;如果主机只读取从机送来的数据,SSEL 和 MOSI 都可以不要。
3 线和 2 线的 SPI 大家要知道怎么回事,实际使用也是有应用的,但是当我们提及 SPI的时候,一般都是指标准 SPI,都是指 4 根线的这种形式。SPI 通信的主机也是我们的单片机,在读写数据时序的过程中,有四种模式,要了解这四种模式,首先我们得学习以下两个名词。
- CPOL: Clock Polarity,就是时钟的极性。时钟的极性是什么概念呢?通信的整个过程分为空闲时刻和通信时刻,如果 SCLK
在数据发送之前和之后的空闲状态是高电平,那么就是 CPOL=1,如果空闲状态 SCLK 是低电平,那么就是 CPOL=0。 - CPHA: Clock Phase,就是时钟的相位。
主机和从机要交换数据,就牵涉到一个问题,即主机在什么时刻输出数据到 MOSI 上而从机在什么时刻采样这个数据,或者从机在什么时刻输出数据到 MISO 上而主机什么时刻采样这个数据。同步通信的一个特点就是所有数据的变化和采样都是伴随着时钟沿进行的,也就是说数据总是在时钟的边沿附近变化或被采样。而一个时钟周期必定包含了一个上升沿和一个下降沿,这是周期的定义所决定的,只是这两个沿的先后并无规定。又因为数据从产生的时刻到它的稳定是需要一定时间的,那么,如果主机在上升沿输出数据到 MOSI 上,从机就只能在下降沿去采样这个数据了。反之如果一方在下降沿输出数据,那么另一方就必须在上升沿采样这个数据。
CPHA=1,就表示数据的输出是在一个时钟周期的第一个沿上,至于这个沿是上升沿还是下降沿,这要视 CPOL 的值而定,CPOL=1 那就是下降沿,反之就是上升沿。那么数据的采样自然就是在第二个沿上了。
CPHA=0,就表示数据的采样是在一个时钟周期的第一个沿上,同样它是什么沿由 CPOL决定。那么数据的输出自然就在第二个沿上了。仔细想一下,这里会有一个问题:就是当一帧数据开始传输第一个 bit 时,在第一个时钟沿上就采样该数据了,那么它是在什么时候输出来的呢?有两种情况:一是 SSEL 使能的边沿,二是上一帧数据的最后一个时钟沿,有时两种情况还会同时生效。
我们以 CPOL=1/CPHA=1 为例,时序图如下:
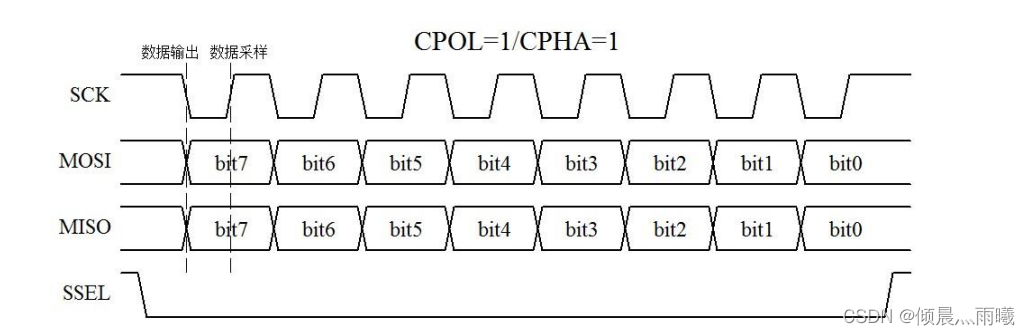
当数据未发送时以及发送完毕后,SCK 都是高电平,因此 CPOL=1。可以看出,在 SCK 第一个沿的时候,MOSI 和 MISO 会发生变化,同时 SCK 第二个沿的时候,数据是稳定的,此刻采样数据是合适的,也就是上升沿即一个时钟周期的后沿锁存读取数据,即 CPHA=1。注意最后最隐蔽的 SSEL 片选,这个引脚通常用来决定是哪个从机和主机进行通信。
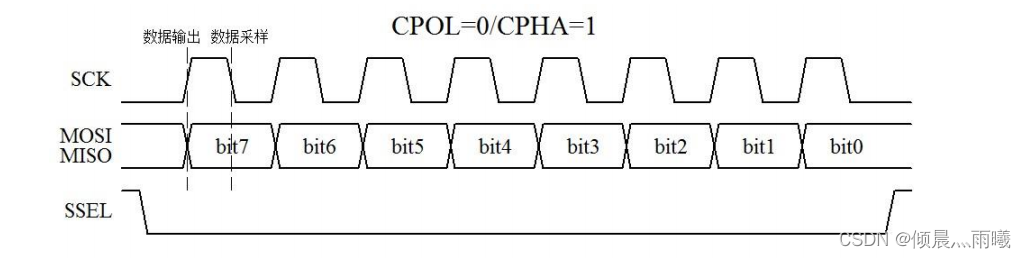
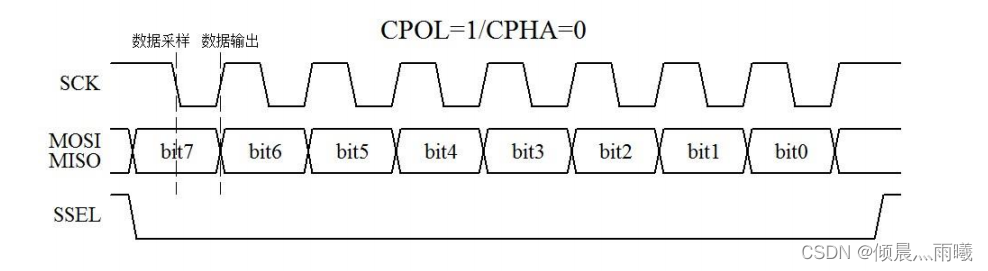
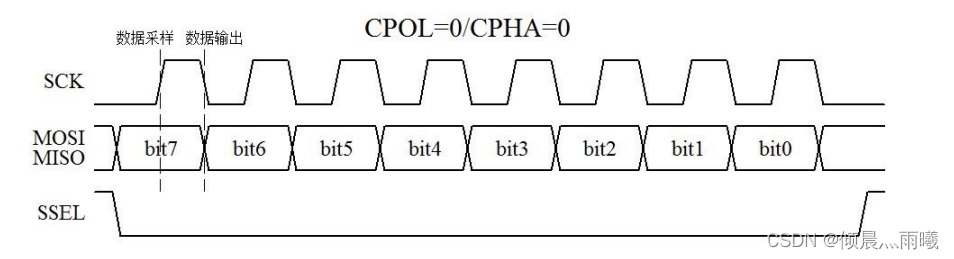
剩余的三种模式,把图画出来,简化起见把 MOSI 和 MISO 合在一起:
在时序上,SPI 是不是比 I2C 要简单的多?没有了起始、停止和应答,UART 和 SPI 在通信的时候,只负责通信,不管是否通信成功,而 I2C 却要通过应答信息来获取通信成功失败的信息,所以相对来说,UART 和 SPI 的时序都要比 I2C 简单一些。
2. DS1302 实时时钟芯片
2.1. DS1302 简介
DS1302 是 DALLAS(达拉斯)公司推出的一款涓流充电时钟芯片,2001 年 DALLAS 被 MAXIM(美信)收购,因此我们看到的 DS1302 的数据手册既有 DALLAS 的标志,又有 MAXIM 的标志。
DS1302 实时时钟芯片广泛应用于电话、传真、便携式仪器等产品领域,它的主要性能指标如下:
- DS1302 是一个实时时钟芯片,可以提供秒、分、小时、日期、月、年等信息,并且 还有软件自动调整的能力,可以通过配置 AM/PM 来决定采用 24 小时格式还是 12 小时格式。
- 拥有 31 字节数据存储 RAM。
- 串行 I/O 通信方式,相对并行来说比较节省 IO 口的使用。
- DS1302 的工作电压比较宽,在 2.0~5.5V 的范围内都可以正常工作。
- DS1302 这种时钟芯片功耗一般都很低,它在工作电压 2.0V 的时候,工作电流小于 300nA。
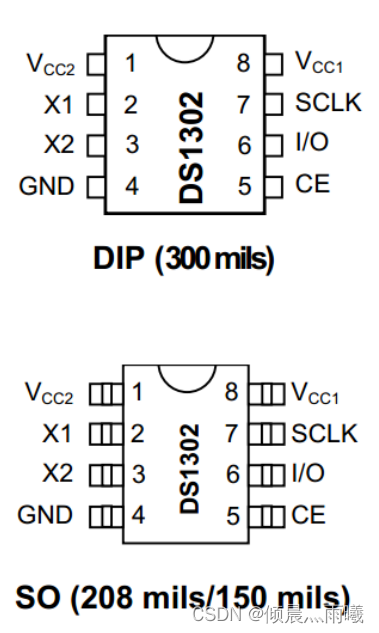
- DS1302 共有 8 个引脚,有两种封装形式,一种是 DIP-8 封装,芯片宽度(不含引脚) 是 300mil,一种是 SOP-8封装,有两种宽度,一种是 150mil,一种是 208mil。如图:
- 当供电电压是 5V 的时候,兼容标准的 TTL 电平标准,这里的意思是,可以完美的 和单片机进行通信。
- 由于 DS1302 是 DS1202 的升级版本,所以所有的功能都兼容 DS1202。此外 DS1302 有两个电源输入,一个是主电源,另外一个是备用电源,比如可以用电池或者大电容,这样做是为了在系统掉电的情况下,我们的时钟还会继续走。如果使用的是充电电池,还可以在 正常工作时,设置充电功能,给我们的备用电池进行充电。
2.2. DS1302 的硬件信息
我们平时所用的不管是单片机,还是其它一些电子器件,根据使用条件的约束,可以分为商业级和工业级,主要是工作温度范围的不同,DS1302 的购买信息如下图:
- +表示无铅/符合 RoHS 标准的封装.
*顶端标识上的 N 表示工业温度范围器件,A 表示无铅器件.
在订购 DS1302 的时候,就可以根据上图所标识的来跟销售厂家沟通,商业级的工作温度范围略窄,是 0~70 摄氏度,而工业级可以工作在零下 40~85 摄氏度。TOP MARK就是指在芯片上印的字。
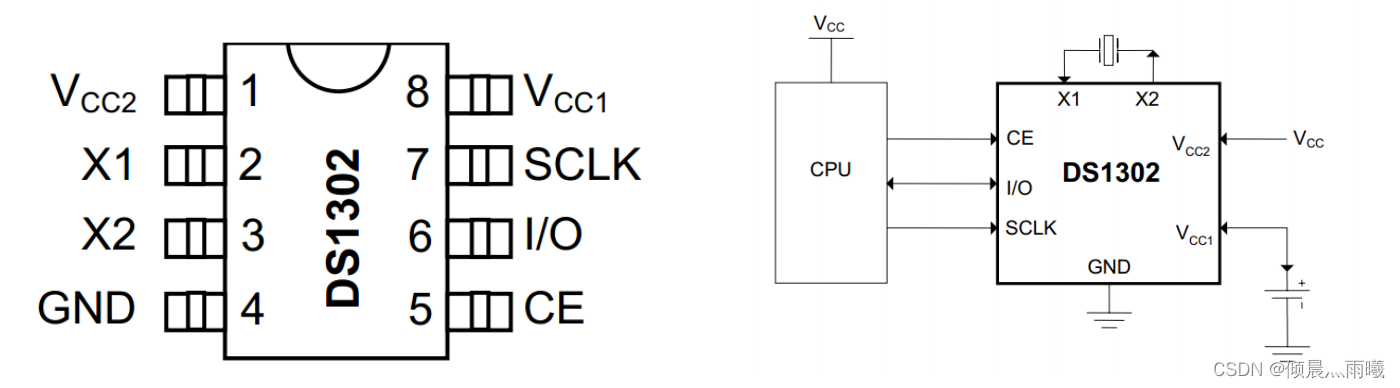
DS1302 一共有 8 个引脚,下边要根据引脚分布图和典型电路图来介绍一下每个引脚的功能,如图所示:
管脚描述:
| 管脚 | 名称 | 功能 |
|---|---|---|
| 1 | VCC2 | 双供电配置中的主电源供应管脚,VCC1 连接到备用电源,在主电源失效时保持时间和日期数据.DS1302 工作于VCC1 和 VCC2 中较大者。当 VCC2比 VCC1高 0.2V时,VCC2 给 DS1302供电.当 VCC1 比 VCC2高时, VCC1给DS1302供电。 |
| 2 | X1 | 与标准的32.768kHz 石英晶体相连。 内部振荡器被设计与指定的6pF 装载电容的晶体一起工作。 |
| 3 | X2 | 与标准的32.768kHz 石英晶体相连。 内部振荡器被设计与指定的6pF 装载电容的晶体一起工作。 |
| 4 | GND | 电源地 |
| 5 | CE | 输入。CE信号在读写时必须保持高电平.此管脚内部有一个 40kΩ(典型值)的下拉电阻连接到地.。注意:先前的数据手册修正把 CE当作 RST。管脚的功能没有改变。 |
| 6 | I/O | 输入/推挽输出。I/O 管脚是三线接口的双向数据管脚。此管脚内部有一个 40kΩ(典型值)的下拉电阻连接到地。 |
| 7 | SCLK | 输入。 SCLK 用来同步串行接口上的数据动作。此管脚内部有一个 40kΩ (典型值)的下拉电阻连接到地。 |
| 8 | VCC1 | 低功率工作在单电源和电池工作系统和低功率备用电池。在使用涓流充电的系统中,这个管脚连接到可再充能量源。UL认证在使用锂电池时确保避免反向充电电流。 |
设计电路图:

DS1302 电路的一个重点就是晶振电路,它所使用的晶振是一个 32.768k 的晶振,晶振外部也不需要额外添加其它的电容或者电阻了。时钟的精度,首先取决于晶振的精度以及晶振的引脚负载电容。如果晶振不准或者负载电容过大或过小,都会导致时钟误差过大。在这一切都搞定后,最终一个考虑因素是晶振的温漂。随着温度的变化,晶振的精度也会发生变化,因此,在实际的系统中,其中一种方法就是经常校对。比如我们所用的电脑的时钟,通常我们会设置一个选项“将计算机设置与 internet 时间同步”。选中这个选项后,一般过一段时间,我们的计算机就会和internet 时间校准同步一次。
2.3. DS1302 寄存器介绍
DS1302 的一条指令一个字节共 8 位,其中第 7 位(即最高位)固定为 1,这一位如果是0 的话,那写进去也是无效的。第 6 位是选择 RAM 还是 CLOCK 的,我前边说过,我们这里主要讲 CLOCK 时钟的使用,它的 RAM 功能我们不用,所以如果选择 CLOCK 功能,第 6位是 0,如果要用 RAM,那第 6 位就是 1。从第 5 到第 1 位,决定了寄存器的 5 位地址,而第 0 位是读写位,如果要写,这一位就是 0,如果要读,这一位就是 1。指令字节直观位分配如图所示:
DS1302 时钟的寄存器,其中 8 个和时钟有关的,5 位地址分别是 0b00000~0b00111,还有一个寄存器的地址是 01000,这是涓流充电所用的寄存器,我们这里不讲。在 DS1302 的数据手册里的地址,直接把第 7 位、第 6 位和第 0 位值给出来了,所以指令就成了 0x80、0x81那些了,最低位是 1,那么表示读,最低位是 0 表示写,如图所示: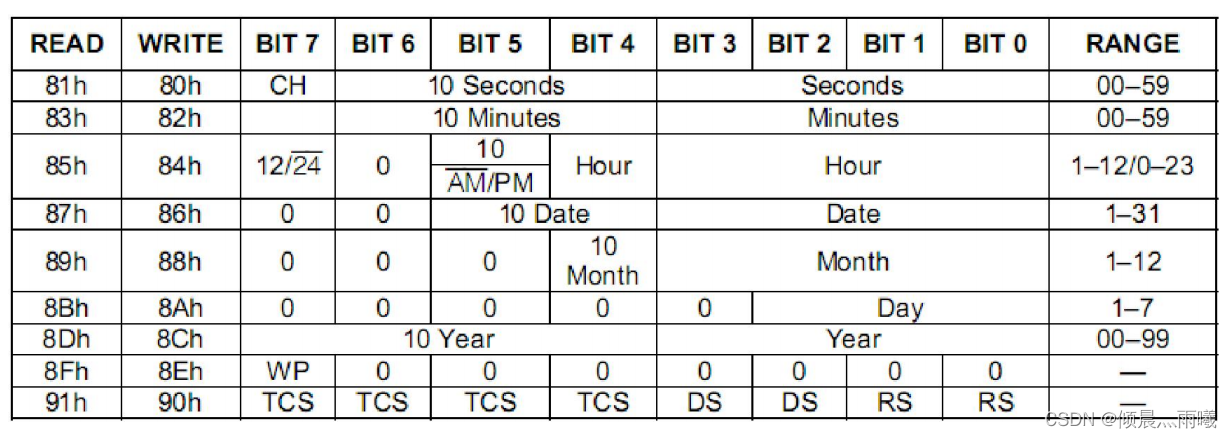
寄存器 0:最高位 CH 是一个时钟停止标志位。如果时钟电路有备用电源,上电后,我们要先检测一下这一位,如果这一位是 0,那说明时钟芯片在系统掉电后,由于备用电源的供给,时钟是持续正常运行的;如果这一位是 1,那么说明时钟芯片在系统掉电后,时钟部分不工作了。如果 Vcc1 悬空或者是电池没电了,当我们下次重新上电时,读取这一位,那这一位就是 1,我们可以通过这一位判断时钟在单片机系统掉电后是否还正常运行。剩下的 7 位高 3 位是秒的十位,低 4 位是秒的个位,这里再提请注意一次,DS1302 内部是 BCD 码,而秒的十位最大是 5,所以 3 个二进制位就够了。
- 寄存器 1:最高位未使用,剩下的 7 位中高 3 位是分钟的十位,低 4 位是分钟的个位。
- 寄存器 2:bit7 是 1 的话代表是 12 小时制,0 代表是 24 小时制;bit6 固定是 0,bit5 在 12 小时制下 0
代表的是上午,1 代表的是下午,在 24 小时制下和 bit4 一起代表了小时的十位,低 4 位代表的是小时的个位。 - 寄存器 3:高 2 位固定是 0,bit5 和 bit4 是日期的十位,低 4 位是日期的个位。
- 寄存器 4:高 3 位固定是 0,bit4 是月的十位,低 4 位是月的个位。
- 寄存器 5:高 5 位固定是 0,低 3 位代表了星期。
- 寄存器 6:高 4 位代表了年的十位,低 4 位代表了年的个位。请特别注意,这里的 00~99 指的是 2000 年~2099 年。
- 寄存器 7:最高位一个写保护位,如果这一位是 1,那么是禁止给任何其它寄存器或者那 31 个字节的 RAM
写数据的。因此在写数据之前,这一位必须先写成 0。
2.4. DS1302 通信时序介绍
DS1302 我们前边也有提起过,是三根线,分别是 CE、I/O 和 SCLK,其中 CE 是使能线,SCLK 是时钟线,I/O 是数据线。前边我们介绍过了 SPI 通信,这个 DS1302 的通信线定义和 SPI 怎么这么像呢?
事实上,DS1302 的通信是 SPI 的变异种类,它用了 SPI 的通信时序,但是通信的时候没有完全按照 SPI 的规则来,下面我们一点点解剖 DS1302 的变异 SPI 通信方式。
先看一下单字节写入操作,如图所示: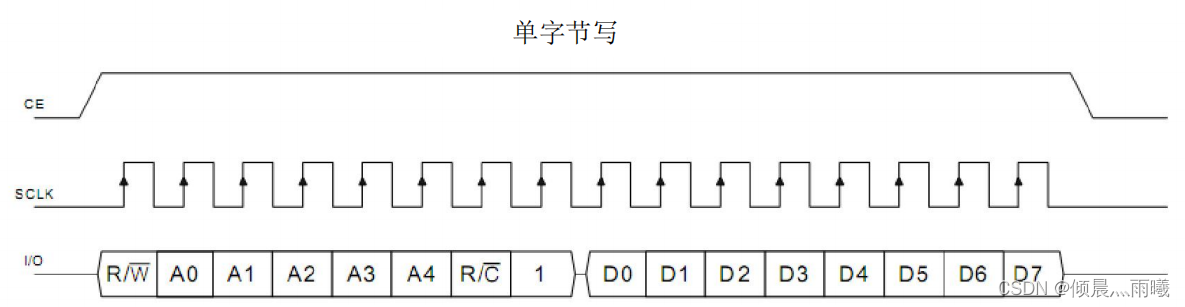
然后我们再对比一下 CPOL=0/CPHA=0 情况下的 SPI 的操作时序,如图所示: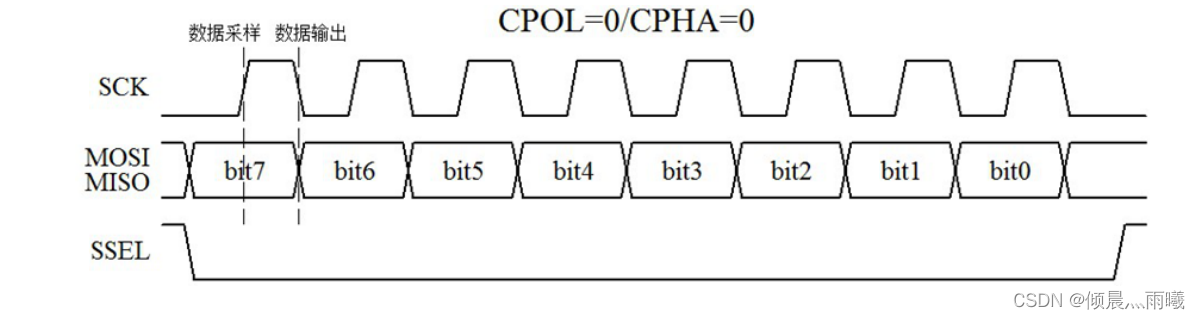
其中 CE 和 SSEL 的使能控制是反的,对于通信写数据,都是在 SCK 的上升沿,从机进行采样,下降沿的时候,主机发送数据。DS1302 的时序里,单片机要预先写一个字节指令,指明要写入的寄存器的地址以及后续的操作是写操作,然后再写入一个字节的数据。
单字节读操作: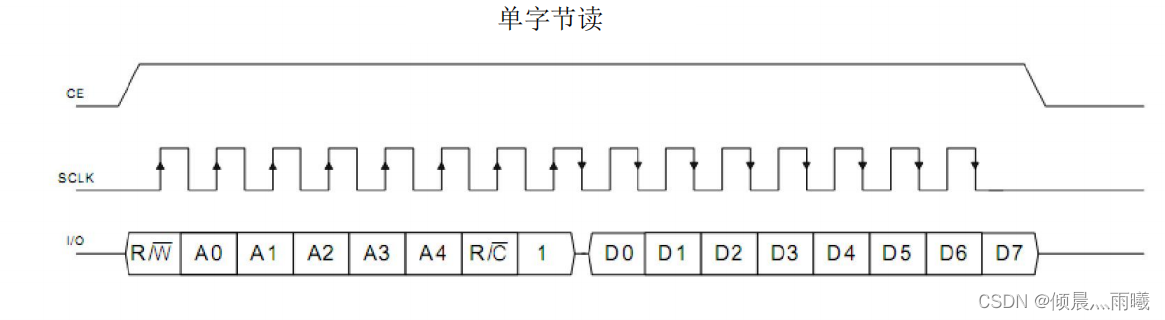
读操作有两处需要特别注意的地方。第一,DS1302 的时序图上的箭头都是针对 DS1302 来说的,因此读操作的时候,先写第一个字节指令,上升沿的时候 DS1302 来锁存数据,下降沿我们用单片机发送数据。到了第二个字数据,由于我们这个时序过程相当于CPOL=0/CPHA=0,前沿发送数据,后沿读取数据,第二个字节是 DS1302 下降沿输出数据,我们的单片机上升沿来读取,因此箭头从 DS1302 角度来说,出现在了下降沿。
第二个需要注意的地方就是,我们的单片机没有标准的 SPI 接口,和 I2C 一样需要用 IO口来模拟通信过程。在读 DS1302 的时候,理论上 SPI 是上升沿读取,但是程序是用 IO 口模拟的,所以数据的读取和时钟沿的变化不可能同时了,必然就有一个先后顺序。通过实验发现,如果先读取 IO 线上的数据,再拉高 SCLK 产生上升沿,那么读到的数据一定是正确的,而颠倒顺序后数据就有可能出错。这个问题产生的原因还是在于 DS1302 的通信协议与标准SPI 协议存在的差异造成的,如果是标准 SPI 的数据线,数据会一直保持到下一个周期的下降沿才会变化,所以读取数和上升沿的先后顺序就无所谓了;但 DS1302 的 IO 线会在时钟上升沿后被 DS1302 释放,也就是撤销强推挽输出变为弱下拉状态,而此时在 51 单片机引脚内部上拉的作用下,IO 线上的实际电平会慢慢上升,从而导致在上升沿产生后再读取 IO 数据的话就可能会出错。因此这里的程序我们按照先读取 IO 数据,再拉高 SCLK 产生上升沿的顺序。
2.5. 实验
下面我们就写一个程序,先将 2022 年 9 月 14 号星期三 12 点 30 分 00 秒这个时间写到DS1302 内部,让 DS1302 正常运行,然后再不停的读取 DS1302 的当前时间,并显示在我们的液晶屏上。
DS1302.h
#ifndef _DS1302_H
#define _DS1302_H
//---包含头文件---//
#include<reg52.h>
#include<intrins.h>
//---定义DS1302_使用的IO口---//
sbit DS1302_IO=P3^4;
sbit DS1302_CE=P3^5;
sbit DS1302_CK=P3^6;
//---定义全局函数---//
void DS1302_Write(unsigned char addr, unsigned char dat);
unsigned char DS1302_Read(unsigned char addr);
void DS1302_Init();
void DS1302_ReadTime();
//---加入全局变量--//
extern unsigned char TIME[7]; //加入全局变量
#endif /* _DS1302_H */
DS1302.C
#include"DS1302.h"
//---DS1302写入和读取时分秒的地址命令---//
//---秒分时日月周年 最低位读写位;-------//
unsigned char code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d};
unsigned char code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
//---存储顺序是秒分时日月周年,存储格式是用BCD码---//
unsigned char TIME[7] = {0x00, 0x30, 0x12, 0x14, 0x09, 0x03, 0x22};
/**
*@函数名称:DS1302_Write
*
*@功能: 用单次写操作向某一寄存器写入一个字节
*
*@参数: addr-需要写入的地址
*
*@参数: dat-需要写入的字节
*
*@返回值: 无
*/
void DS1302_Write(unsigned char addr, unsigned char dat)
{
unsigned char n;
DS1302_CE = 0;
_nop_();
DS1302_CK = 0;//先将DS1302_CK置低电平。
_nop_();
DS1302_CE = 1; //然后将DS1302_CE(CE)置高电平。
_nop_();
for (n = 0; n < 8; n ++)//开始传送八位地址命令
{
DS1302_IO = addr & 0x01;//数据从低位开始传送
addr >>= 1;
DS1302_CK = 1;//数据在上升沿时,DS1302_读取数据
_nop_();
DS1302_CK = 0;
_nop_();
}
for (n = 0; n < 8; n ++)//写入8位数据
{
DS1302_IO = dat & 0x01;
dat >>= 1;
DS1302_CK = 1;//数据在上升沿时,DS1302_读取数据
_nop_();
DS1302_CK = 0;
_nop_();
}
DS1302_CE = 0;//传送数据结束
_nop_();
}
/**
*@函数名称:DS1302_Write
*
*@功能: 用单次写操作向某一寄存器读一个字节
*
*@参数: addr-需要读的地址
*
*@返回值: dat-读到的数据
*/
unsigned char DS1302_Read(unsigned char addr)
{
unsigned char n,dat,dat1;
DS1302_CE = 0;
_nop_();
DS1302_CK = 0;//先将DS1302_CK置低电平。
_nop_();
DS1302_CE = 1;//然后将DS1302_CE(CE)置高电平。
_nop_();
for(n = 0; n < 8; n ++)//开始传送八位地址命令
{
DS1302_IO = addr & 0x01;//数据从低位开始传送
addr >>= 1;
DS1302_CK = 1;//数据在上升沿时,DS1302_读取数据
_nop_();
DS1302_CK = 0;//DS1302_下降沿时,放置数据
_nop_();
}
_nop_();
for(n = 0; n < 8; n ++)//读取8位数据
{
dat1 = DS1302_IO;//从最低位开始接收
dat = (dat>>1) | (dat1<<7);
DS1302_CK = 1;
_nop_();
DS1302_CK = 0;//DS1302下降沿时,放置数据
_nop_();
}
DS1302_CE = 0;
_nop_(); //以下为DS1302复位的稳定时间,必须的。
DS1302_CK = 1;
_nop_();
DS1302_IO = 0;
_nop_();
DS1302_IO = 1;
_nop_();
return dat;
}
/**
*@函数名称:DS1302_Init
*
*@功能: 初始化DS302
*
*@参数: 无
*
*@返回值: 无
*/
void DS1302_Init()
{
unsigned char n;
DS1302_Write(0x8E,0X00); //禁止写保护,就是关闭写保护功能
for (n = 0; n < 7; n ++)//写入7个字节的时钟信号:分秒时日月周年
{
DS1302_Write(WRITE_RTC_ADDR[n],TIME[n]);
}
DS1302_Write(0x8E,0x80); //打开写保护功能
}
/**
*@函数名称:ReadTime
*
*@功能: 读取时间数据
*
*@参数: 无
*
*@返回值: 无
*/
void DS1302_ReadTime()
{
unsigned char n;
for (n=0; n<7; n++)//读取7个字节的时钟信号:分秒时日月周年
{
TIME[n] = DS1302_Read(READ_RTC_ADDR[n]);
}
}
mian.c
#include "Ds1302.h"
#include "LCD1602.h"
void delay(unsigned int n)
{
while (n --);
}
void main()
{
unsigned char str[20];
DS1302_Init();
LCD1602_Init();
while(1)
{
DS1302_ReadTime();
str[0] = '2';
str[1] = '0';
str[2] = TIME[6]/16 + '0';
str[3] = TIME[6]%16 + '0';
str[4] = '-';
str[5] = TIME[4]/16 + '0';
str[6] = TIME[4]%16 + '0';
str[7] = '-';
str[8] = TIME[3]/16 + '0';
str[9] = TIME[3]%16 + '0';
str[10] = '\0';
LCD1602_ShowStr(0, 0, str);
str[0] = TIME[2]/16 + '0';
str[1] = TIME[2]%16 + '0';
str[2] = ':';
str[3] = TIME[1]/16 + '0';
str[4] = TIME[1]%16 + '0';
str[5] = ':';
str[6] = TIME[0]/16 + '0';
str[7] = TIME[0]%16 + '0';
str[8] = '\0';
LCD1602_ShowStr(0, 1, str);
delay(5000);
}
}