1.ADC
是指将连续变量的模拟信号转换为离散的数学信号的器件
STM32ADC特点
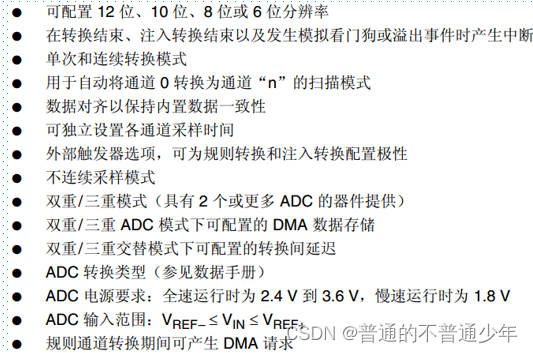
1.分配率决定精度,假设我有5v的电源,分辨率为12位,就是把5V分成2的12份,会很小,
分辨率位数越高,越精确。
2.在转换接受等时候可以产生中中断事件处理
3.数据左对齐和右对齐设置
4.可以外部触发ADC
5.一个ADC有多个通道,选择其中一个通道进行处理。
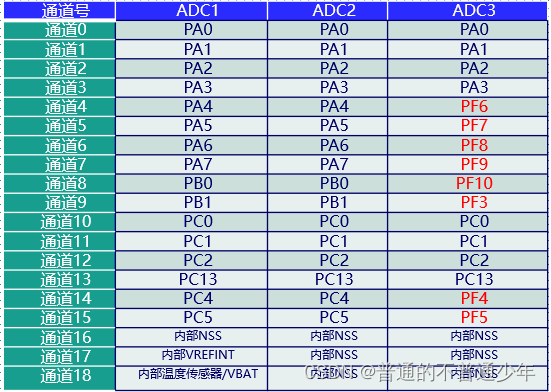
每个ADC的通道可能重合
2.ADC框图
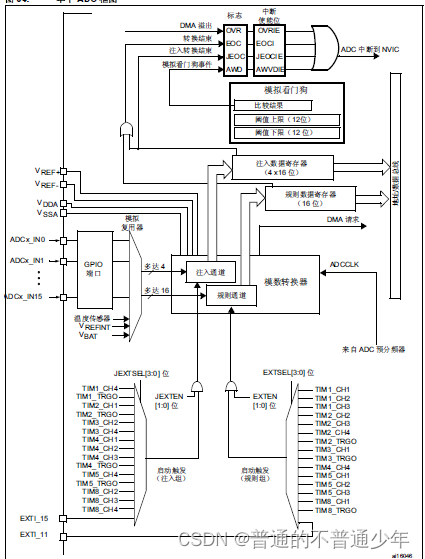
首先有16个以下的通道和内部通道,然后到注入中断或规则通道
(注入通道更像一个中断
规则通道更像一个程序)
然后转换到对应的注入通道数据寄存器或规则通道数据寄存器
产生了相应的事件,相应的标志位置位,执行对应函数
还会产生DMA请求
下部分
注入通道和规则通道可以通过外部事件触发,定时器触发,还有一个触发使能位
ADC框图细节
1.电源部分
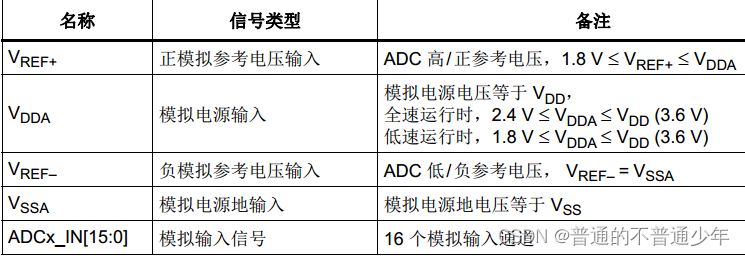
正模拟参考电压在1.8V与模拟电源之间
模拟电源输入在2.4-3.6V(高速)或1.8-3.6V(低数)
正模拟参考电压接地
模拟电源地输入也是接地
模拟输入信号,不得小于负参考电压,不得大于正参考电压
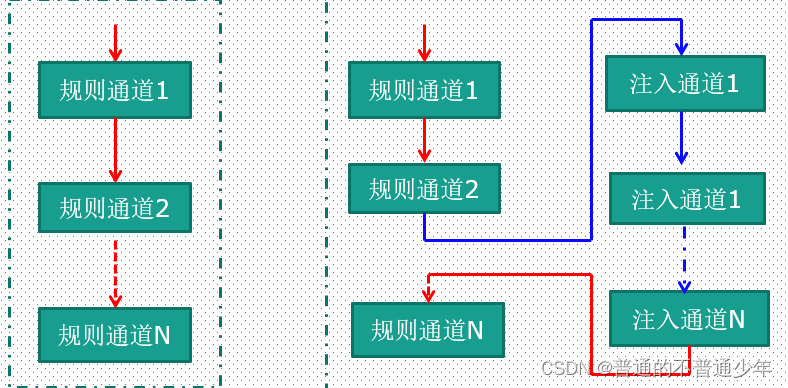
STM32通道组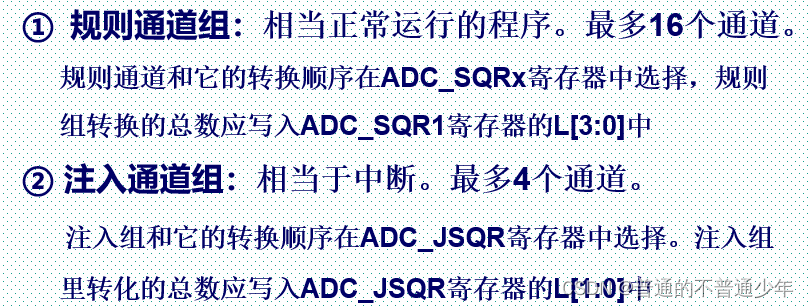
规则通道,假如有很多通道,按顺序往下采集
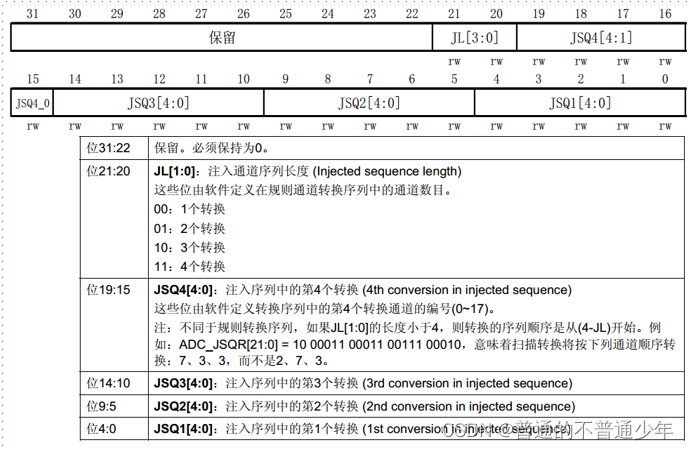
注入通道,假如有很多通道,有专门的顺序在ADC_JSQR里面设置
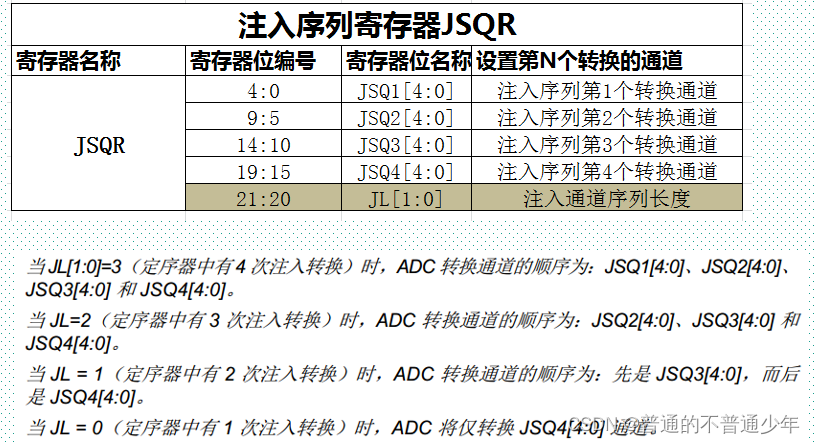
ADC_JSQR寄存器
21:20设置转换数
0:19位设置要转换的通道
ADC触发方式
软件触发和硬件触发
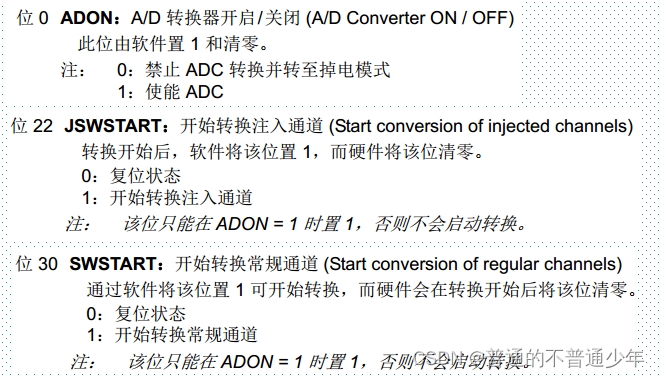
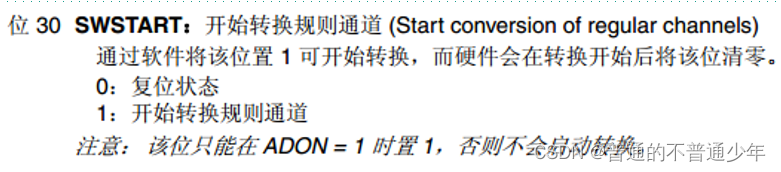
软件触发
软件触发主要在ADC_CR2寄存器
ADC_CR2寄存器
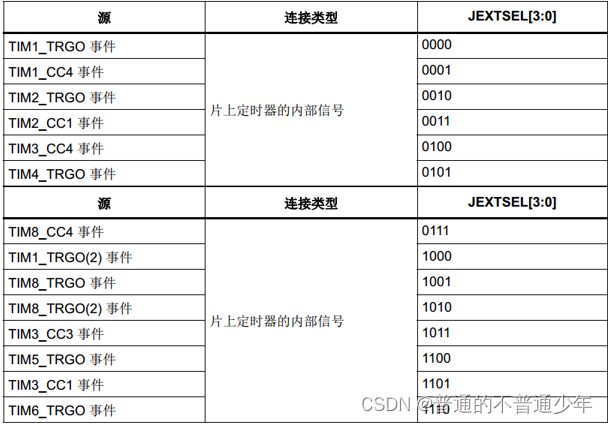
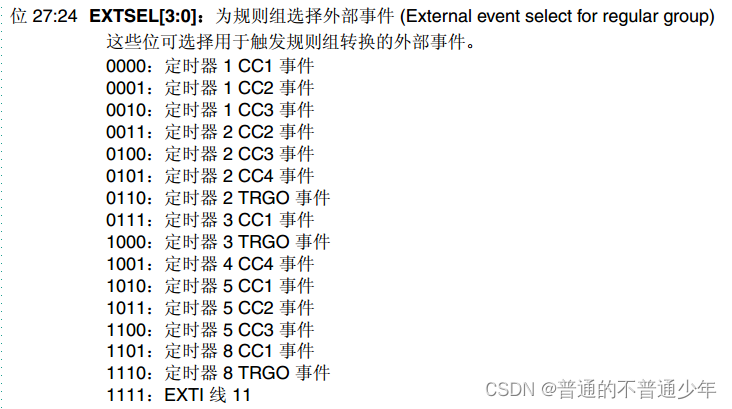
外部触发
规则
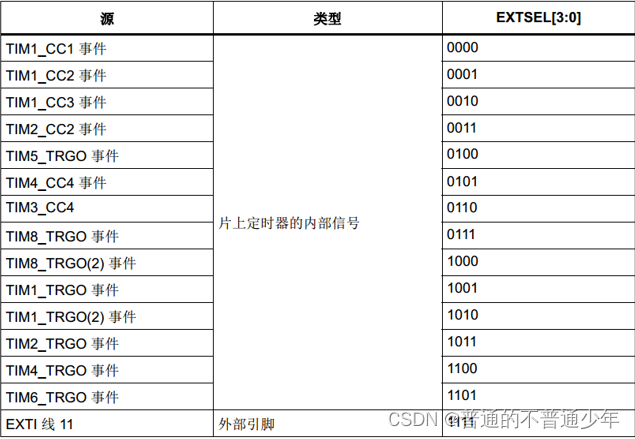
注入
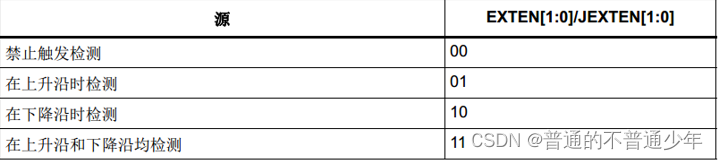
ADC外部触发极性
上升沿还是下降沿触发
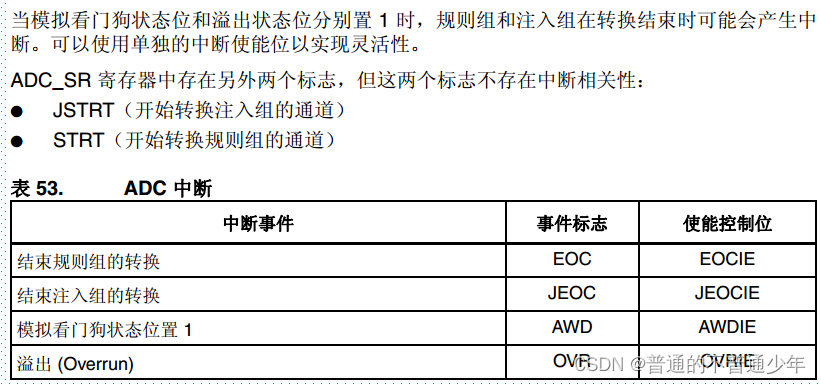
ADC中断
ADC时钟
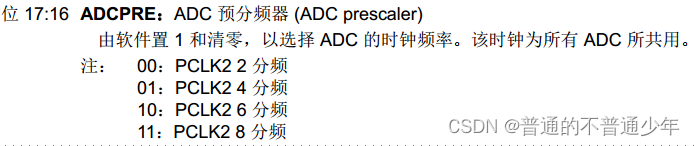
m3的分频系数不能超过14M
m4/m7不能超过36M
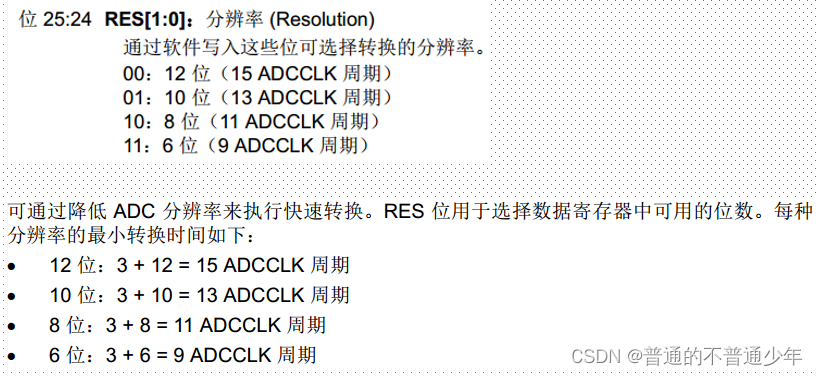
ADC分辨率
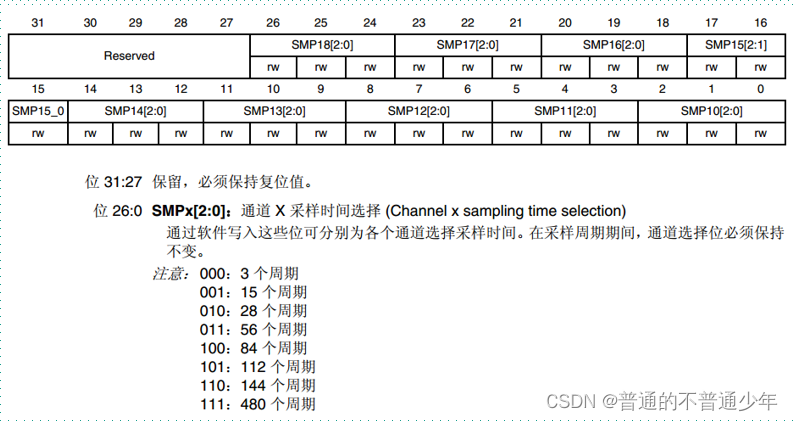
ADC采样时间
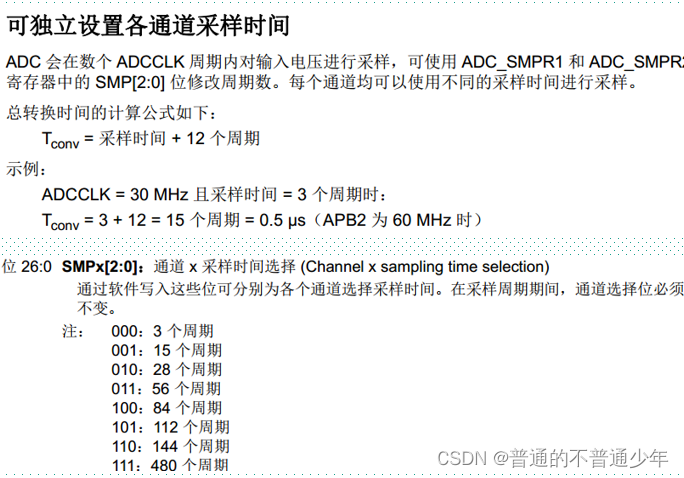
ADC采样时间可以对每一个通道可以采用不同的采用时间
所以总转换时间
采样时间+12个周期
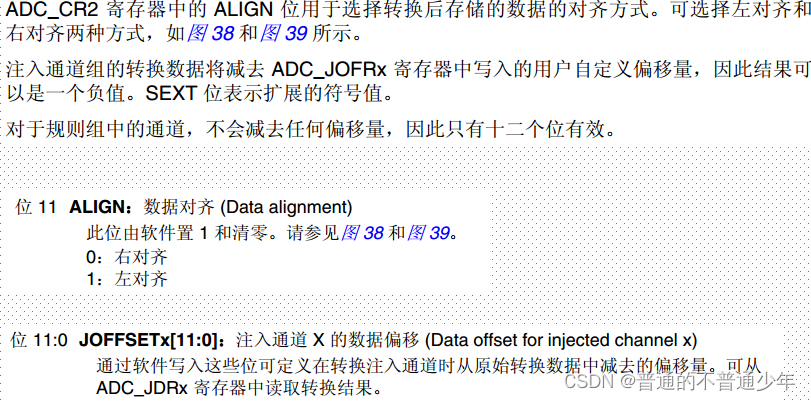
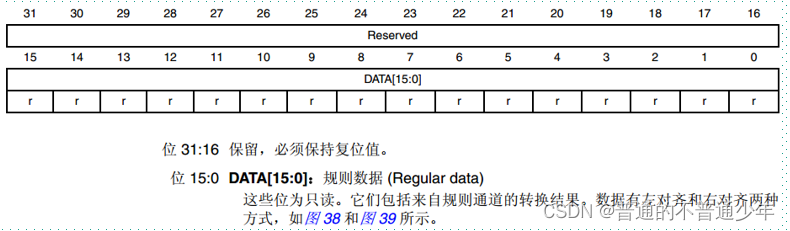
ADC数据对齐方式
主要对应规则通道
ADC转换结果
ADC计数方法
如果分辨率为12位,采集范围为0-3.3V
ADC转换数据范围0-2^(12-1)
就是0-4095,如果采集数字为x,那么输入电压为y=3.3*x/(2^12)
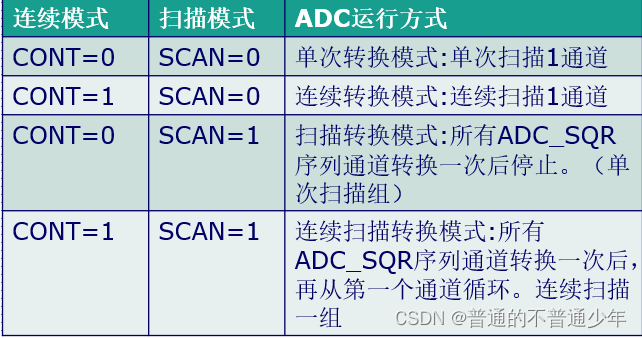
ADC的扫描方法
单次转换
就转换一次,就停止了
连续转换
转换一次后,继续又开始一次
扫描模式
为组中的每一个通道都执行一次转换,也可以开启连续扫描,转换后继续再来一遍
3.ADC寄存器与HAl库函数
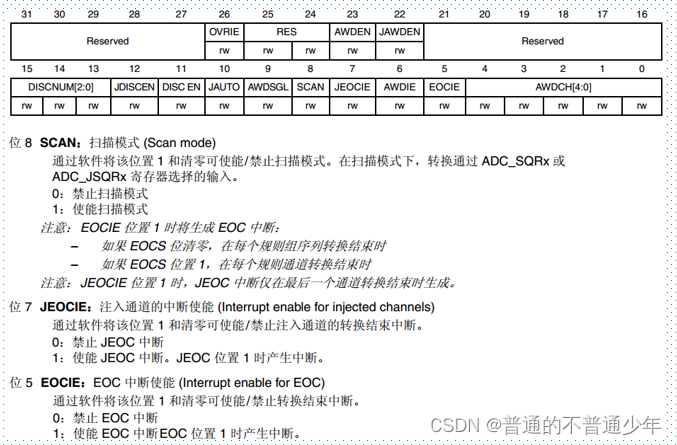
1.ADC_CR1寄存器
注入中断使能与扫描模式,分辨率的设置
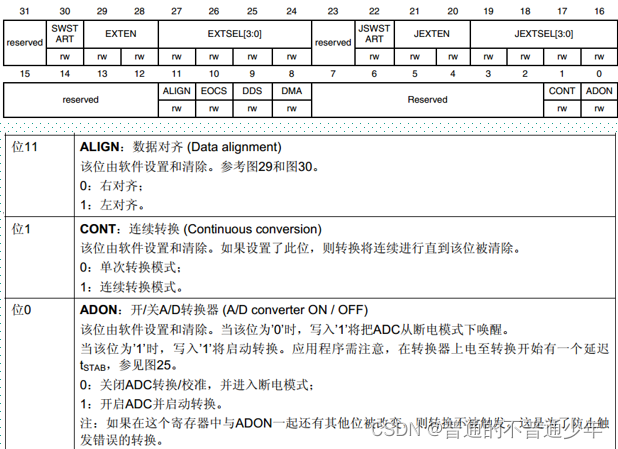
2.ADC_CR2寄存器
连续转换与单次转换,左对齐与右对齐,转换器开关,开启电源,开启规则通道等
3.ADC_SMPR1寄存器/ADC_SMPR2寄存器
为每一个通道设置采样时间
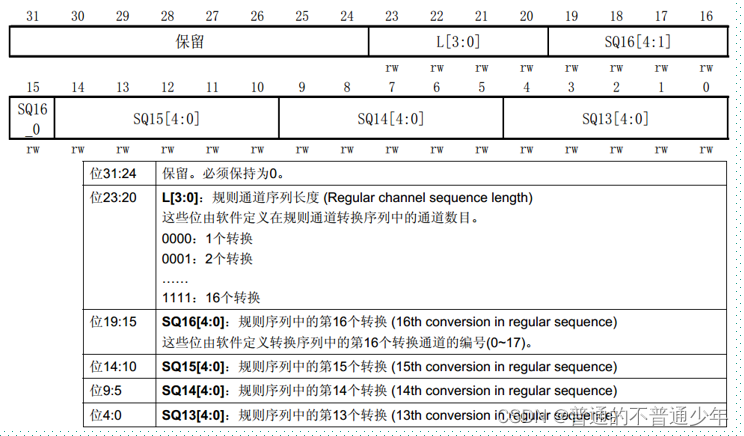
4.ADC_SQR1/SQR2/SQR3
规则序列寄存器
设置规则通道执行顺序
5.ADC_JSQR
注入序列寄存器
设置注入通道执行顺序
6.ADC_DR
规则通道数据寄存器
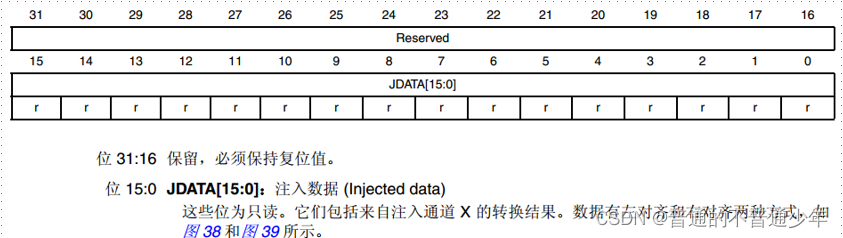
7.ADC_DR
注入通道数据寄存器(有四个,每个注入通道一个)
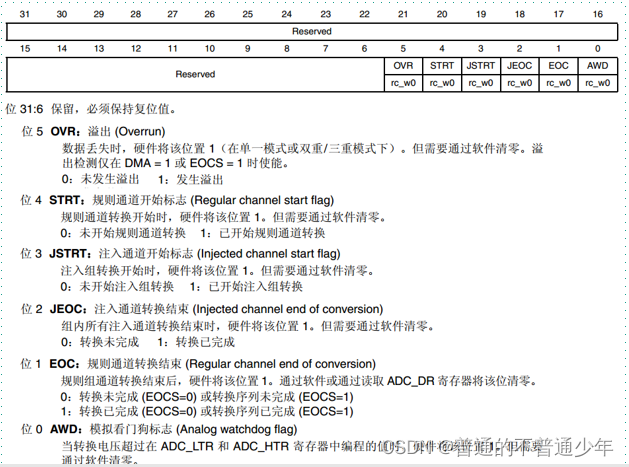
8.ADC_SR
状态寄存器
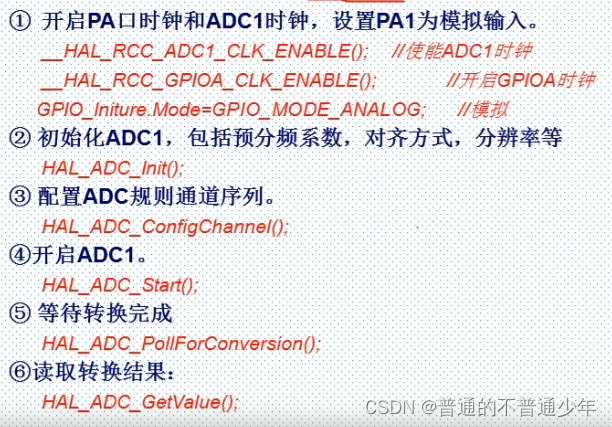
4.ADC的HAL库函数
1.通用初始化函数,规则通道
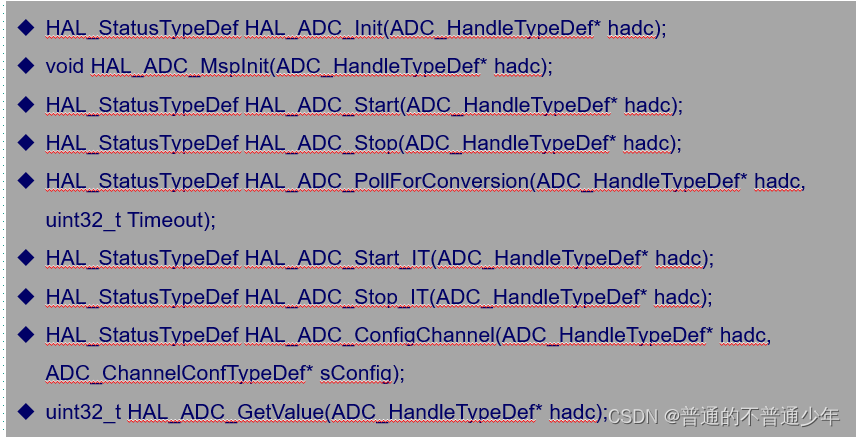
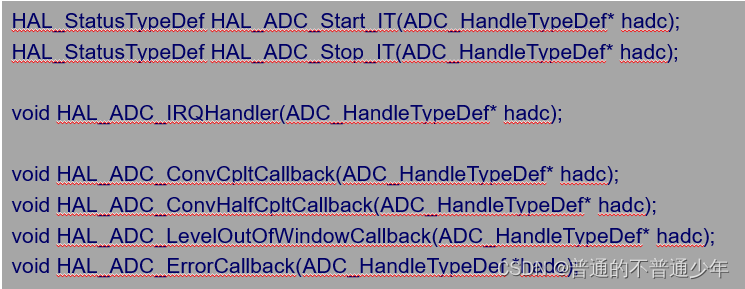
2.中断相关
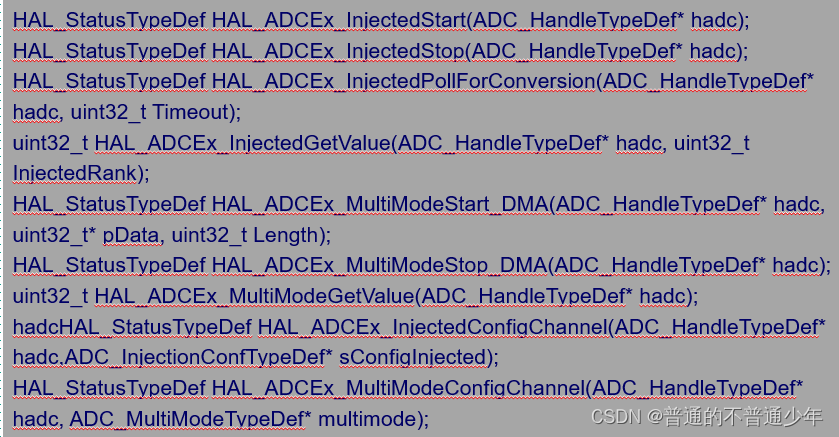
3.注入通道,多重模式
**HAL_ADC_INit(ADC_HandleTypeDef *hadc);**初始化ADC
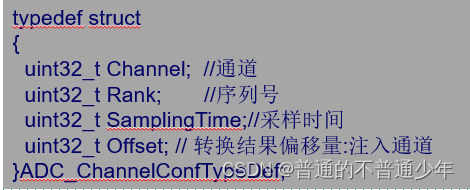
ADC规则通道配置函数
HAL_ADC_ConfigChannel)(ADC_HandleTypeDef *hadc,ADC_ChannelConTypeDef *sConfig)
开启ADC转换
HAL_ADC_Start(&ADC1_Handler)
等待转换完成
HAL_StatusTypedef HAL_ADC_PollForConversion(ADC_HandleTypeDef * hadc,uint32_t Timout)
获取转换结果
uint32_t HAL_ADC_GetValue(ADC_HandleTypeDef * hadc)
5.ADC的程序代码
ADC1的通道五的单次转换
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "lcd.h"
GPIO_InitTypeDef GPIO_Initure;
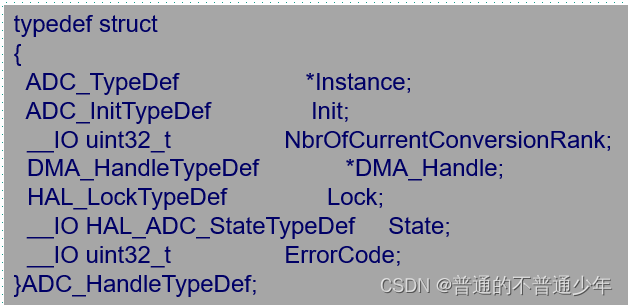
ADC_HandleTypeDef hadc;
ADC_ChannelConfTypeDef sConfig;
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
__HAL_RCC_GPIOA_CLK_ENABLE(); //A时钟使能
__HAL_RCC_ADC1_CLK_ENABLE(); //ADC时钟使能
GPIO_Initure.Pin=GPIO_PIN_5;
GPIO_Initure.Mode=GPIO_MODE_ANALOG; //模拟
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
}
void My_ADC_Init()
{
hadc.Instance=ADC1;
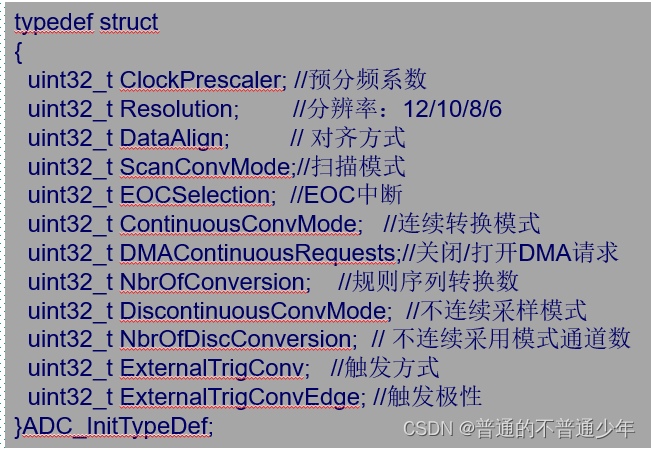
hadc.Init.ClockPrescaler=ADC_CLOCK_SYNC_PCLK_DIV4; //分频系数
hadc.Init.ContinuousConvMode=DISABLE; //不开启连续
hadc.Init.DataAlign=ADC_DATAALIGN_RIGHT; //右对齐
hadc.Init.DiscontinuousConvMode= DISABLE; //不开启不连续
hadc.Init.DMAContinuousRequests= DISABLE; //DMA不使用
hadc.Init.EOCSelection = DISABLE; //中断不开启
hadc.Init.ExternalTrigConv=ADC_SOFTWARE_START;//选择软件触发
//hadc.Init.ExternalTrigConvEdge外部触发边沿
hadc.Init.NbrOfConversion = 1; //一个规则转换
hadc.Init.NbrOfDiscConversion = 0; //没有使用
hadc.Init.Resolution=ADC_RESOLUTION_12B; //分辨率为12位
hadc.Init.ScanConvMode = DISABLE; //不设置扫描模式
HAL_ADC_Init(&hadc);
}
u16 Get_ADC(u8 ch)
{
sConfig.Channel=ch; //指定通道
sConfig.Rank=1; //指定序列
sConfig.SamplingTime=ADC_SAMPLETIME_480CYCLES; //采样时间
//sConfig.Offset=1; //注入通道的偏移值
HAL_ADC_ConfigChannel(&hadc,&sConfig);
HAL_ADC_Start(&hadc);
HAL_ADC_PollForConversion(&hadc, 10);
return HAL_ADC_GetValue(&hadc);
}
u16 Get_ADC_Average(u8 ch,u8 times)
{
u32 sum=0;
u8 t;
for(t=0;t<times;t++)
{
sum+=Get_ADC(ch);
delay_ms(5);
}
return sum/times;
}
//ADC_CHANNEL_5
int main(void)
{
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180); //初始化延时函数
uart_init(115200); //初始化USART
LED_Init(); //初始化LED
LCD_Init(); //初始化LCD
POINT_COLOR=RED;
My_ADC_Init();
u16 a;
while(1)
{
a = Get_ADC_Average(ADC_CHANNEL_5,20);
printf("原本的值%d\r\n",a);
printf("计算后的值%f\r\n",a*0.1*3.3/4096);
delay_ms(1000);
}
}