����Ŀ¼
���Ե���
-
�����ʺ�С������,���������С��뽲�ľ�����,����ƪ������,��������С�
-
����ģ�������ͨ�õ�,���Կ���һƪ�̳�,����������ģ�����ҵIJ�һ��,Ҳ��Ҫ����,ԭ����ͨ�ġ�
-
������ͨ�ŵ�һ��,����Ҫѧ��STM32����������,����һ������ͨ��֪ʶ����Ҫ�ġ�
-
�����漰����Ӳ������STM32F103C8T6��Сϵͳ��(��ʵ�����汾���ǿ��Ե�)������ģ������Ǽ�о��BLE5.0(���ͦ����,����������,JDY-31,HC-06�ȶ�����),�����Ҫ�����ͶŰ������ɡ�
-
�������ģ��û�к�������,���Ҿ�Ȼ��С������,���ֲк��Ӳ��á����,����������ȷ������,С�����������ߴ�����(����Ҳ���Ե����Ű�����)�����������ж�,���Ժ���ʱ��ע��ͨ��,ʹ��ʱ��ô�������֮���,�����Զ��ٶȻ���bilibili��
һ��ͨ�Ż���֪ʶ
1.1 ͨ�ŵ��״������ʲô?
��������,ͨ�Ŵ�����DZ���Ҳ���Ƕ���������������������,����·Ϊ��·ʱ,���ͷ�����һ��������С��ʱ��ĵ�ѹ�ź�����ʾ��Щ��������,����˫��Լ��һ��0.001���0V��������0,5V��������1,���ͷ������Ⱥ�����������0.001���0V��һ��0.001���5V,�����൱�ڷ�����001�����ֳ���һ��ʱ��ĵ�ѹ�źž�����Ԫ������·Ϊ���ߵ粨ʱ,��Ԫ����һ�ݷݵĵ粨�ˡ����ڵ��ź���һ�ֲ�,���Կ�����Ϊ��������·�ϴ�����һ��������
1.2 �����ʺͲ�����
ͨ���ٶ��ж����?����������,�ñ�����(Bitrate)������,��������λʱ���ڴ����bit����,��λ��bit/s��������������,ʹ�ò�����(Baudrate),����ʾ��λʱ���ڴ������Ԫ(��,��)����,��Ԫ����������ᵽ�ĵ�ƽ�ź�,���Խ�����������ͨ����һ����Ԫ����һ����������,��ʱ�����ʺͲ���������ȡ�Ҳ�в��ȵ�ʱ��,������0V��ʾ0,2V��ʾ1,4V��ʾ2,6V��ʾ3,��ʱ��һ����Ԫ����һ���Ľ�����,��������Dz����ʵĶ�����
ϰ��
������Ŀ,��֮��������,ֻ����һ������,���������������
- �����ʺͲ����ʵ��������ϵ?
1.1 ˫���͵���
ͨ��������AB��ͨ��,��Ԫ������һ����������
| ���� | ���� | ���� |
|---|---|---|
| ����ͨ�� | ͨ����·�ǵ���,��ʼ���ն��Ƿ��ͷ��ͽ��շ��ǹ̶��� | ����ֻ�ܴ�A�е�B��,B�еij��Ӳ��ܿ���A�С� |
| ˫��ͨ�� | ��·��˫��,���ݿ��Դ�A����B,Ҳ���Դ�B����A,��ͨ��˫�������Է���Ϣ���Է�,�ֿ��Է�Ϊ��˫����ȫ˫�� | A�еij����Կ���B��,B�еij���Ҳ���Ե�A�С� |
| ȫ˫�� | ��·ȫʱ����˫������,�κ�ʱ���κ�һ�������Է�����Ϣ���Է� | AB��֮��·�ܿ�,���м䳵�ӿ����������� |
| ��˫�� | ��·ֻ����ij��ʱ���ڶ�ij������,˫������ʹ����·,��ָijʱ����,ֻ��һ������һ�����ܡ� | AB�������м乫·��խ,ֻ������һ����ͨ��,AB����Լ��8��-9���dz���ֻ�ܴ�A�е�B,9-10����B�е�A��,�����������档 |
������˫���Ƕ�Ӧ��,������·��˫��Ļ��ǵ���Ľ��л��֡�
ȫ˫���Ͱ�˫���dzɶ�,�����ǰ�����·�Ƿ�ȫʱ��ζ�˫������ʹ�á�
ȫ˫���Ȱ�˫��Ҫ����,Ч�ʸ�,�������ݶ�,�ɱ����ߡ���˫��Ҫ��,˫����ҪԼ����ʱ��,��Ȼ��ײ����
ϰ��
������Ŀ,��֮��������,ֻ����һ������,���������������
- ���˽�̸��������ͨ��?
- У����,У��������������ͨ��?
- ���˳�����������ͨ��?
- �Ͽδ�ֽ����������ͨ��?
1.2 ���кͲ���
����ͨ��ָ˫��֮��ͨ�������Ϣ��(8������)��������,���ݿ��Բ��д���,����·�ܿ��ܹ����ɶ�����������ʻ��
����ͨ��ָ˫��֮��ͨ�����ٸ���Ϣ��(8��������)��������,�������类һ���ߴ�����������,���Խ������С�
����ͨ�ſ���������ǿ,��·������õ�,���ʵ͡�
1.3 ��ͬͨ�ź�ͬ��ͨ��
ΪʲôҪ��ͬ�����첽,������������ô����?Ҫ��ش��������,������Ҫ����һ������:��δ����������?���������û���������������,�������ŷ�����:��������·��Ӳ���ȶ�ʱ,����·�������¿������������ݴ���,Ҳ����˵:���ͷ�����ͣ��ط�������,���շ�Ҳ��ʱ������Ϣ,ͬʱΪ�˾����ܱ�֤���ݴ��䰲ȫ��,���ܷ�����һ����Ϣ��Ҫ��һ���Ƿ�ɹ����յ�״̬,���ͷ��ڽ������״̬����ܷ�����һ����Ϣ��ʵ����������ͣ��,�����˫����ͬһ��ʱ�䲽��һ�����͡����պͼ�����Ϣ,����������һ��,ÿ�����ڹ涨��ʱ��������һ�µ���ɸ��ԵĶ���,�ԴﵽЧ����ߡ������ͬ��ͨ�Ź��̡�
�첽ͨ������Ϊ�����С����������,����ٿ�ң�س�,���ֳ�����ͨ�����ͷ�����ʱ�ط���������Ϣ,���շ����պ�����ظ��������ͬ��ͨ�����Dz���ȫ��,����������ν,����ͨ��������ʽ���������ֲ���ȫ������:ң������,��Ϊij������,����û�н��ܵ�ת��,��ô�˻��ٴβ���һ��ת�����,���ⲻ���첽ͨ�žͲ�Ҫ��˫����ͬһ��ʱ���½���ͬ������,ֻҪ�����������ʱ��ͺá�����,˫��Ҫ����ͬ�IJ����ʡ�
�����ʱ��,��ʵ����ʱ������,�������˰�ʱ���Ϊ��������ʱ����,ʱ�������ǰ�1���Ϊ�ܶ��,��оƬ�豸��ʱ�䡣
ϰ��
- ���첽ͨ����,Ϊʲôͨ�������,˫��Ҫ����һ���IJ�����?
��������STM32��Ƭ��
�����������
2.1 ��̻���
- CubeIDE
- ������������
2.2 Ӳ������
��������˽���ͼ,
2.2.1 ����ͼ
2.2.1 Ӳ�����ܺ�����
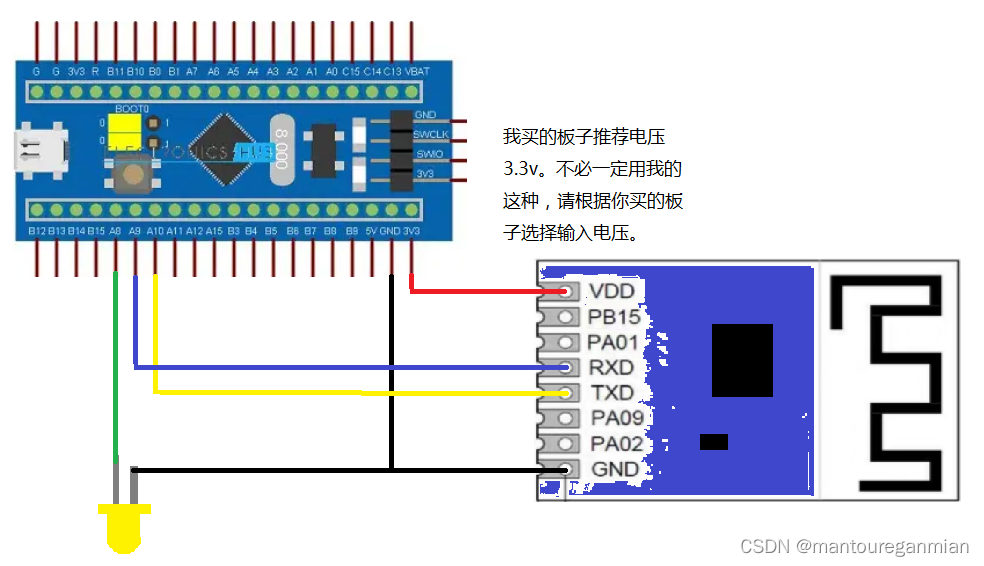
�I������ģ������ͼ,��VDD GND�ǽ������Դ��������,��Ҫ������3.3V��ѹ,���õ�STM32�����ϵĵ�Դ��RXD TXD����������STM32���ӵ�,RXD��receive external data����,���ڽ������Ե�Ƭ������Ϣ,TXD����������Ƭ��������Ϣ����İ���һ�㶼�������˵����,�������š���ѹ�Ͳ����ʵȡ�

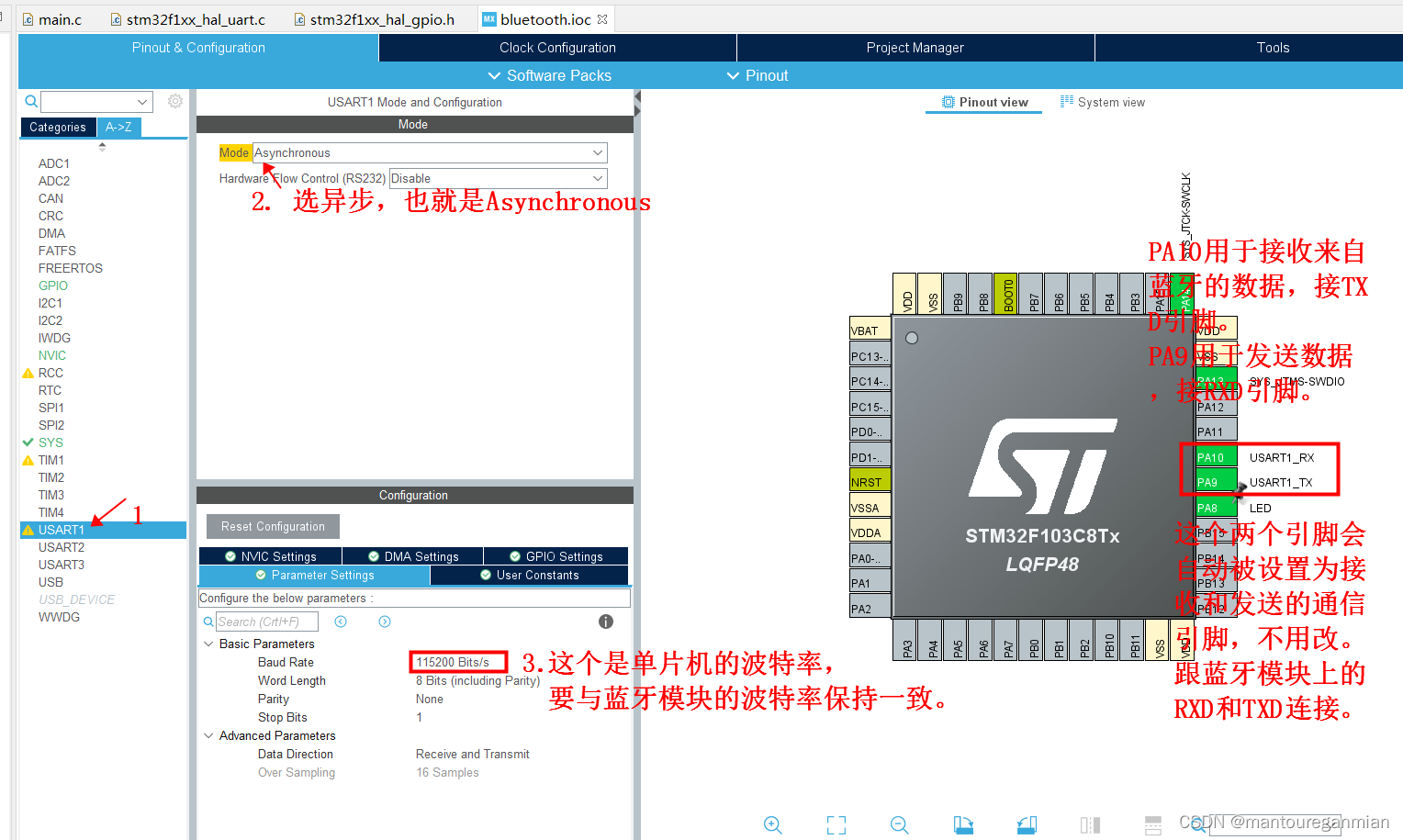
STM32��ͨ��USART��������ģ��,UART�����첽ȫ˫��ͨ��,���������ߵ���ͨ����,�ֱ�������ᵽ���������š����õ���STM32F103C8T6оƬ,���Դ�������USART,����ѡ��USART1,CubeIDE���Զ�ѡ��PA10��PA9������������������ͨ�š���������ͼ:

2.3 ����
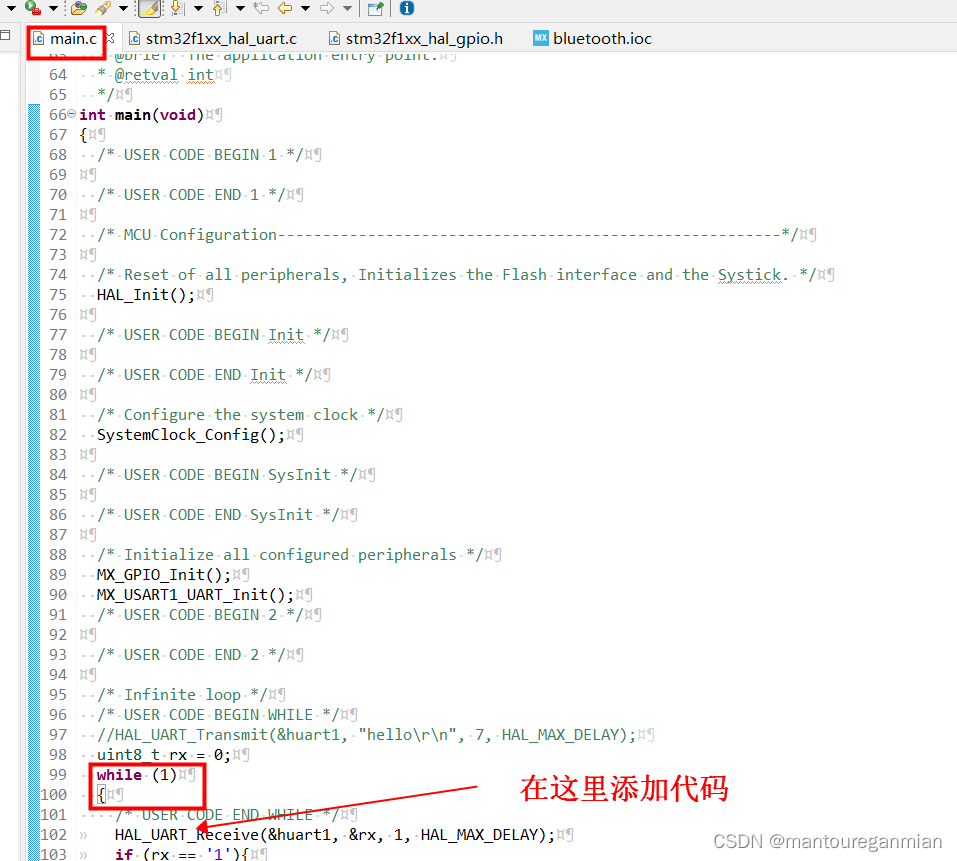
�������������´���:
uint8_t rx = 0; // ����һ������������,���ڽ����������͵����ݡ�
while (1)
{
/* USER CODE END WHILE */
// ���ڽ��������������������ݡ�
// &huart1 ��һ����װ�õĽṹ��,��������������,HAL_UART_Receive�������Զ�ʶ��ʹ��PA10���н������ݡ�
// &rx,����������Ϣ�ŵ�rx��,����rx����������,ֱ�Ӵ��ݸ�����,����ȥ��ֻ�Ǹ���,����Ҫ���������á�
// 1,��ʾ����һ���ֽ�(8��������)��
// HAL_MAX_DELAY ��ʾ����һ�������źź�,��Ƭ����ͣ���������´ν���������Ϣ��
HAL_UART_Receive(&huart1, &rx, 1, HAL_MAX_DELAY);
// rx == '1', ���������������һ���ַ�1���������֡�
if (rx == '1'){
HAL_GPIO_WritePin(GPIOA, LED_Pin, GPIO_PIN_SET); # ����ߵ�ƽ,����
}else{
HAL_GPIO_WritePin(GPIOA, LED_Pin, GPIO_PIN_RESET); # ����͵�ƽ,����
}
/* USER CODE BEGIN 3 */
}
������벢���ص���Ƭ���ϡ�
2.3 �ֻ����ƶ�����
- ��������һ���ֻ�������������,���õ���
BLE�����������APP�� - ������������,����������������,Ȼ�����������"1", ���ɵ���,�������������