ѧϰstm32�жϡ�DMAͨ��ԭ���ͱ�̷�����ʹ��stm32tubemx��HAL��ֱ�������±����ϰ:
1. ��stm32F103���İ��GPIOA��һ�ܽŽ�һ��LED,GPIOB�˿�һ���Ž�һ������(�öŰ���ģ�����)�������ж�ģʽ���,�����ؽӸߵ�ƽʱ,LED����;�ӵ͵�ƽʱ,LED��ơ�
һ.������Ŀ
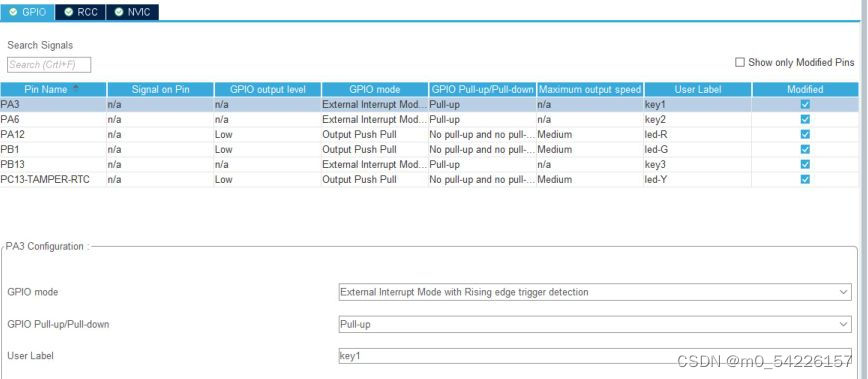
����LED��,��ʼ������GPIO�˿�ģ���
ѡ��PA3,ѡ��GPIO-EXTI3ģʽ;����ѡ��PA6,PB13ΪGPIO_EXTI
��Pinout&Configuration�CSystem?core�CGPIO������Ϊ����ģʽ
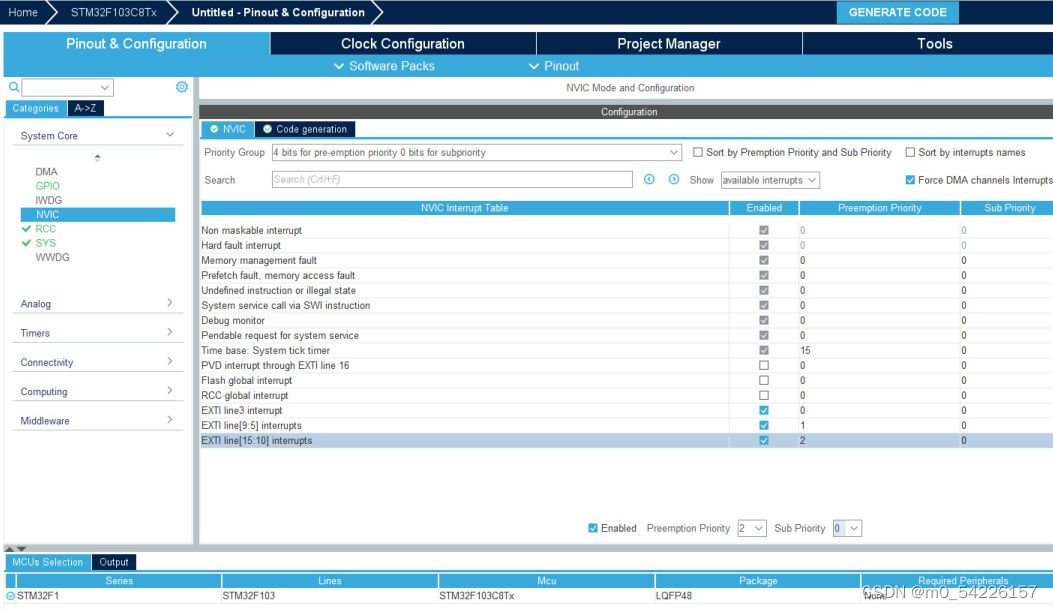
?�����ж����ȼ�:��Pinout&Configuration�CSystem?core�CNVIC��ʹ���ⲿ�ж�,���������ȼ�
?����ʱ��:��ʱ��Ƶ��Ϊ72MHZ
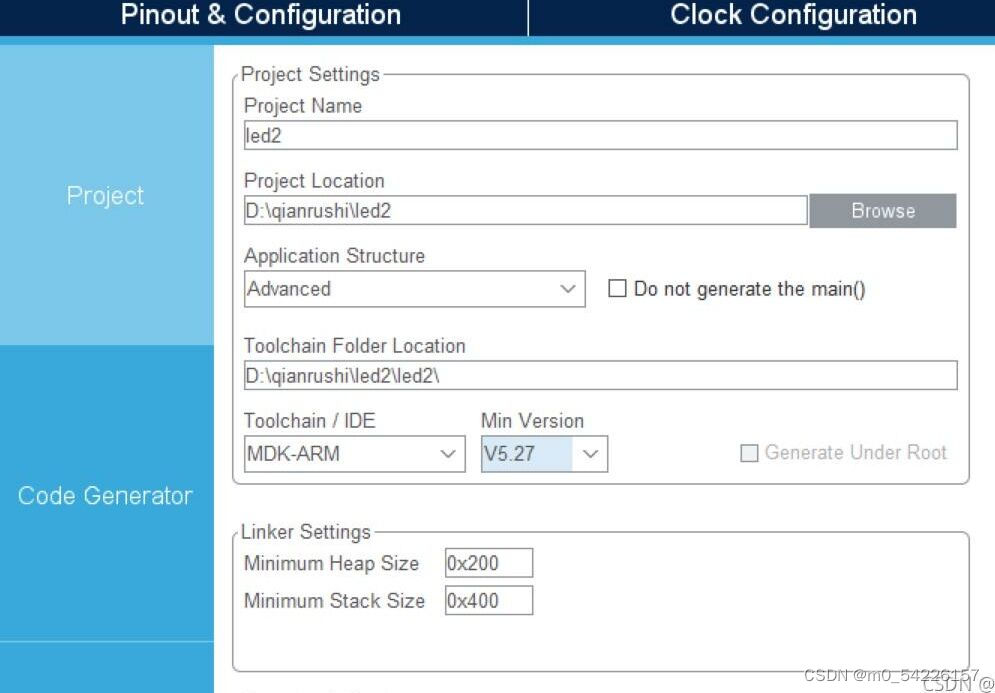
������Ŀ
?��.
����:
void?MX_GPIO_Init(void)
{
??GPIO_InitTypeDef?GPIO_InitStruct?=?{0};
??/*?GPIO?Ports?Clock?Enable?*/
??__HAL_RCC_GPIOC_CLK_ENABLE();
??__HAL_RCC_GPIOD_CLK_ENABLE();
??__HAL_RCC_GPIOA_CLK_ENABLE();
??__HAL_RCC_GPIOB_CLK_ENABLE();
??/*Configure?GPIO?pin?Output?Level?*/
??HAL_GPIO_WritePin(LED_Y_GPIO_Port,?LED_Y_Pin,?GPIO_PIN_RESET);
??/*Configure?GPIO?pin?Output?Level?*/
??HAL_GPIO_WritePin(LED_G_GPIO_Port,?LED_G_Pin,?GPIO_PIN_RESET);
??/*Configure?GPIO?pin?Output?Level?*/
??HAL_GPIO_WritePin(LED_R_GPIO_Port,?LED_R_Pin,?GPIO_PIN_RESET);
??/*Configure?GPIO?pin?:?PtPin?*/
??GPIO_InitStruct.Pin?=?LED_Y_Pin;
??GPIO_InitStruct.Mode?=?GPIO_MODE_OUTPUT_PP;
??GPIO_InitStruct.Pull?=?GPIO_NOPULL;
??GPIO_InitStruct.Speed?=?GPIO_SPEED_FREQ_MEDIUM;
??HAL_GPIO_Init(LED_Y_GPIO_Port,?&GPIO_InitStruct);
??/*Configure?GPIO?pins?:?PAPin?PAPin?*/
??GPIO_InitStruct.Pin?=?KEY1_Pin|KEY2_Pin;
??GPIO_InitStruct.Mode?=?GPIO_MODE_IT_FALLING;
??GPIO_InitStruct.Pull?=?GPIO_PULLUP;
??HAL_GPIO_Init(GPIOA,?&GPIO_InitStruct);
??/*Configure?GPIO?pin?:?PtPin?*/
??GPIO_InitStruct.Pin?=?LED_G_Pin;
??GPIO_InitStruct.Mode?=?GPIO_MODE_OUTPUT_PP;
??GPIO_InitStruct.Pull?=?GPIO_NOPULL;
??GPIO_InitStruct.Speed?=?GPIO_SPEED_FREQ_MEDIUM;
??HAL_GPIO_Init(LED_G_GPIO_Port,?&GPIO_InitStruct);
??/*Configure?GPIO?pin?:?PtPin?*/
??GPIO_InitStruct.Pin?=?KEY3_Pin;
??GPIO_InitStruct.Mode?=?GPIO_MODE_IT_FALLING;
??GPIO_InitStruct.Pull?=?GPIO_PULLUP;
??HAL_GPIO_Init(KEY3_GPIO_Port,?&GPIO_InitStruct);
??/*Configure?GPIO?pin?:?PtPin?*/
??GPIO_InitStruct.Pin?=?LED_R_Pin;
??GPIO_InitStruct.Mode?=?GPIO_MODE_OUTPUT_PP;
??GPIO_InitStruct.Pull?=?GPIO_NOPULL;
??GPIO_InitStruct.Speed?=?GPIO_SPEED_FREQ_MEDIUM;
??HAL_GPIO_Init(LED_R_GPIO_Port,?&GPIO_InitStruct);
??/*?EXTI?interrupt?init*/
??HAL_NVIC_SetPriority(EXTI3_IRQn,?0,?0);
??HAL_NVIC_EnableIRQ(EXTI3_IRQn);
??HAL_NVIC_SetPriority(EXTI9_5_IRQn,?1,?0);
??HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);
??HAL_NVIC_SetPriority(EXTI15_10_IRQn,?2,?0);
??HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
ע:�⼸���ⲿ�ж϶�ʹ����ͬһ����������,HAL_GPIO_EXTI_IRQHandler,ͨ�����벻ͬ�IJ���,����������һ���ж��ߴ������жϡ�
��main�ļ��м����жϷ�����
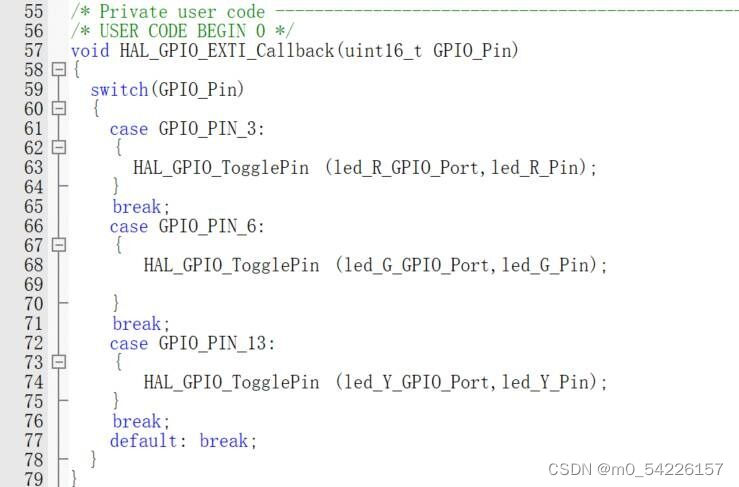
?ÿ�ΰ�������,LED��ƽ�仯һ��
void?HAL_GPIO_EXTI_Callback(uint16_t?GPIO_Pin)
{
??switch(GPIO_Pin)
??{
????case?GPIO_PIN_3:?
{
HAL_GPIO_TogglePin(led_R_GPIO_Port,led_R_Pin);
}
break;
????case?GPIO_PIN_6:
{
?HAL_GPIO_TogglePin(led_G_GPIO_Port,led_G_Pin);
}
break;
????case?GPIO_PIN_13:
{
???HAL_GPIO_TogglePin(led_Y_GPIO_Port,led_Y_Pin);
}
break;
????default:?break;
??}
}
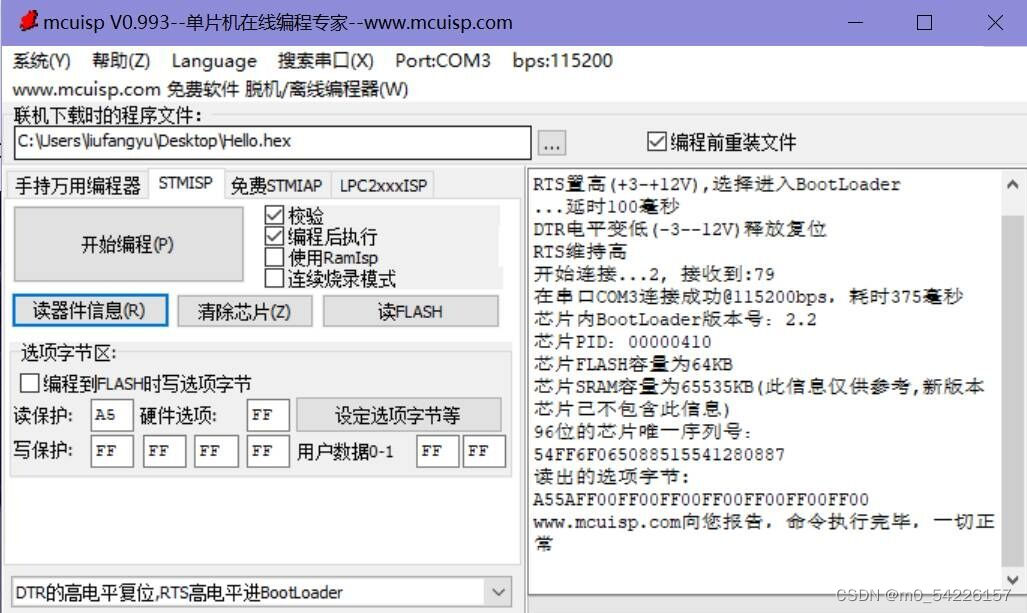
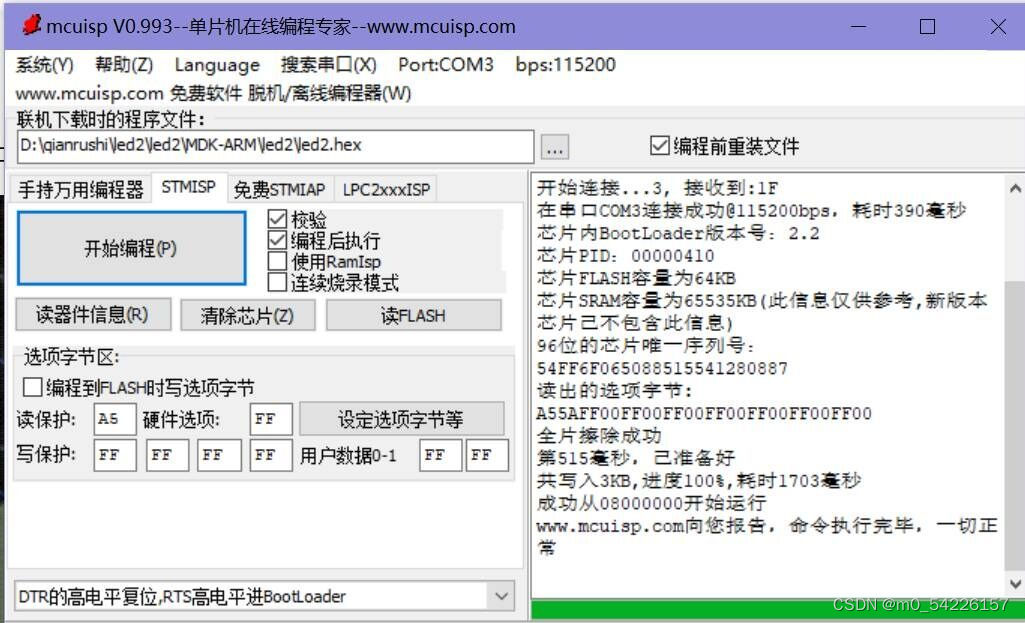
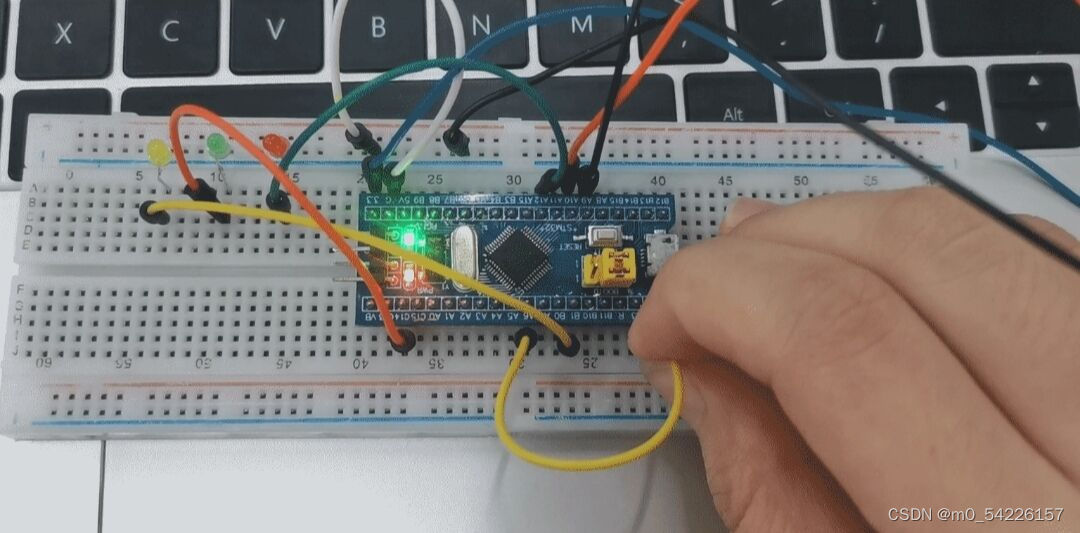
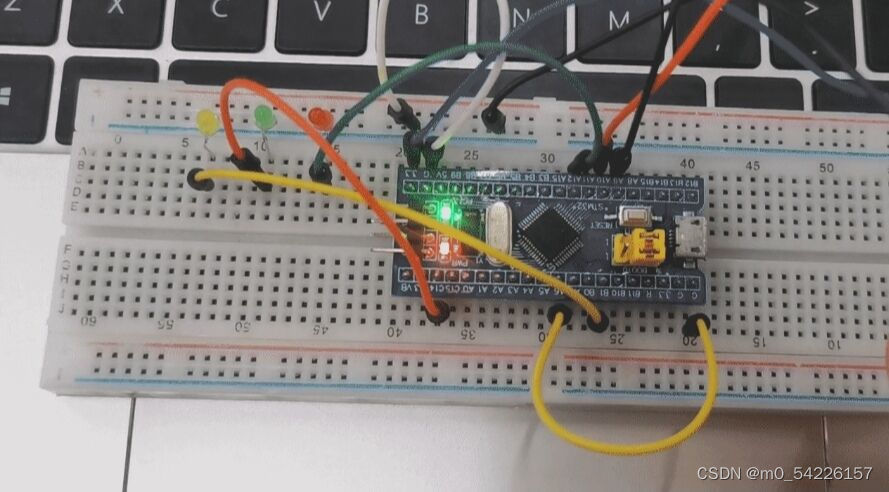
��.���
��¼
 ??
??
ÿһ�νӵ�,�ж�һ��

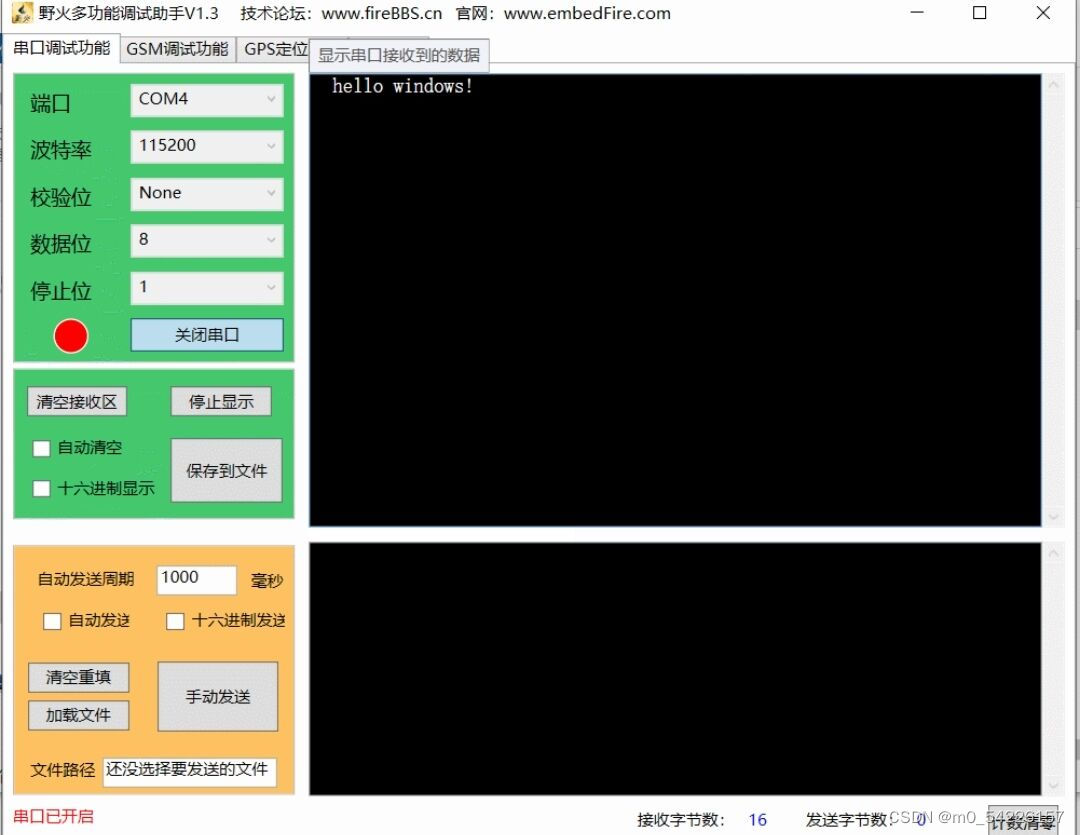
?2.?���ô����жϷ�ʽ�������ܵĴ���ͨ����ҵ,�ֱ�ʵ��:1)��stm32���յ��ַ���s��ʱ,ֹͣ�������͡�hello?windows!��;?�����յ��ַ���t��ʱ,�������͡�hello?windows!��(��ʾ:����һ��ȫ�ֱ������źŵ�);2)��stm32���յ��ַ���stop?stm32!��ʱ,ֹͣ�������͡�hello?windows!��;?�����յ��ַ���go?stm32!��ʱ,�������͡�hello?windows!��(��ʾ:Ҫ�����յ��������ַ����浽һ���ַ�������,�����б�ƥ�䡣дһ�������ַ����ĺ�����
һ.������Ŀ
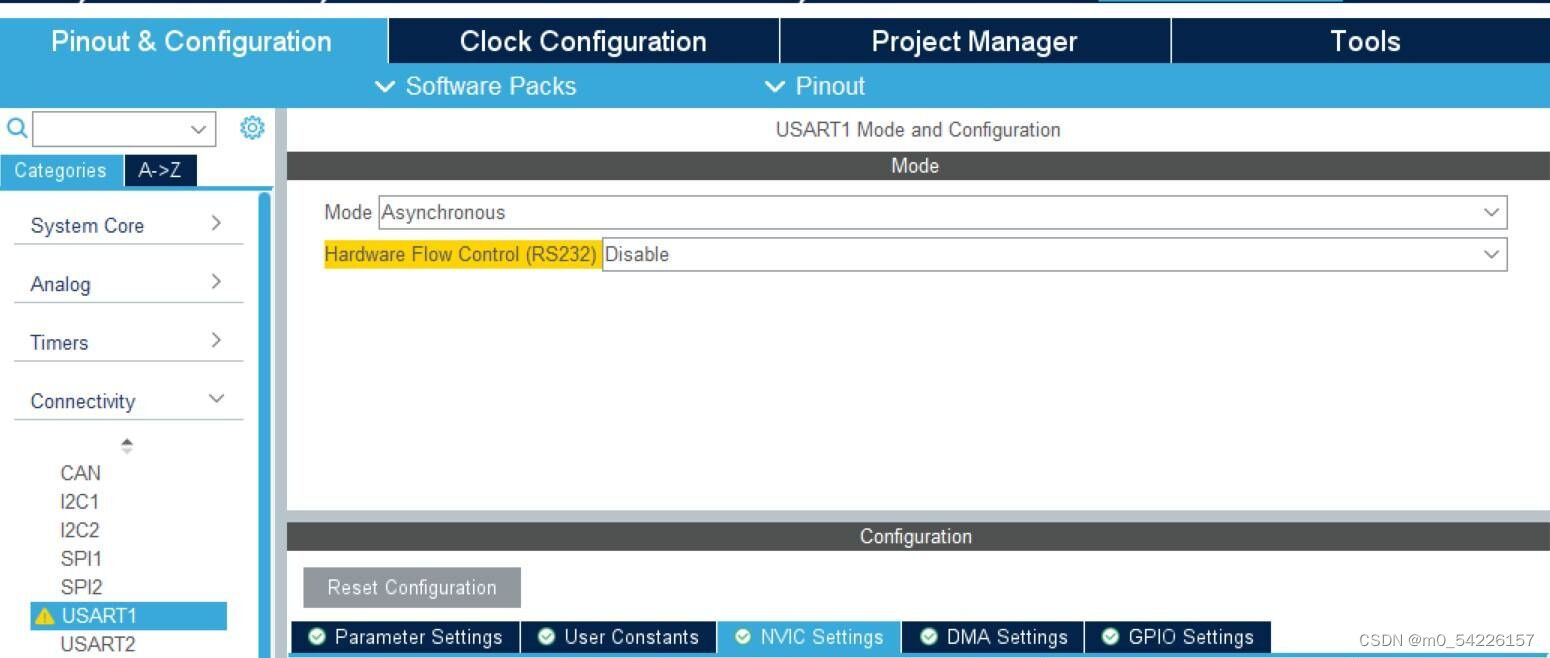
���ô���USART1,��MODE��ѡ��Asynchronous,�����½�����ѡ���ж�
?��.?�����
1.��װCH34��������:http://www.wch.cn/search?t=all&q=CH34
2.�����
bsp_uart.h:
void?Usart_SendByte(USART_TypeDef?*?pUSARTx,uint8_t?ch);
void?USART_SendString(USART_TypeDef?*?pUSARTx,char?*str);
void?delay_ms(uint16_t?delay_ms);
#ifndef?_BSP_UART_H
#define?_BSP_UART_H
#include?"stm32f10x.h"
//����1-USART1
#define?DEBUG_UARTx USART1;
#define?DEBUG_UART_CLK?????? RCC_APB2Periph_USART1
#define?DEBUG_UART_APBxClkCmd RCC_APB2PeriphClockCmd
#define?DEBUG_UART_BAUDRATE 115200
//USART?GPIO?���ź궨��
#define?DEBUG_USART_GPIO_CLK ??(RCC_APB2Periph_GPIOA)
#define?DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define?DEBUG_USART_TX_GPIO_PORT GPIOA
#define?DEBUG_USART_TX_GPIO_PIN???????GPIO_Pin_9
#define?DEBUG_USART_RX_GPIO_PORT GPIOA
#define?DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define?DEBUG_USART_IRQ USART1_IRQn
#define?DEBUG_USART_IRQHandler USART1_IRQHandler
void?DEBUG_UART_Config(void);
#endif?/*_BSP_UART_H*/
bsp_uart.c:
#include?"./uart/bsp_uart.h"
void?DEBUG_UART_Config(void)
{
/*��һ��:��ʼ��GPIO*/
//����GPIO����
GPIO_InitTypeDef?GPIO_InitStructure;
//���崮�ڶ���
USART_InitTypeDef?USART_InitStructure;
//����GPIO��ʱ��
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK,ENABLE);
//��USART?Tx(��������)��GPIO������Ϊ���츴��ģʽ
GPIO_InitStructure.GPIO_Pin=DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT,&GPIO_InitStructure);
//��USART?Rx(��������)��GPIO����Ϊ��������ģʽ
GPIO_InitStructure.GPIO_Pin=DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT,&GPIO_InitStructure);
/*�ڶ���:���ô��ڵij�ʼ���ṹ��*/
//���������ʱ��
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK,ENABLE);
//������
USART_InitStructure.USART_BaudRate=DEBUG_USART_BAUDRATE;
//���������ֳ�
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
//����ֹͣλ
USART_InitStructure.USART_StopBits=USART_StopBits_1;
//����У��λ
USART_InitStructure.USART_Parity=USART_Parity_No;
//����Ӳ��������
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
//���ù���ģʽ,�����շ�һ��,���ɽ�������,Ҳ�ɷ�������
USART_InitStructure.USART_Mode=USART_Mode_Rx?|?USART_Mode_Tx;
//���ڵij�ʼ������
USART_Init(DEBUG_USARTx,&USART_InitStructure);
/*������:ʹ�ܴ���*/
USART_Cmd(DEBUG_USARTx,ENABLE);
}
//����һ���ֽ�
void?Usart_SendByte(USART_TypeDef?*?pUSARTx,uint8_t?ch)
{
USART_SendData(pUSARTx,ch);//?����һ���ֽ����ݵ�USART
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)==RESET);//?�ȴ��������ݼĴ���Ϊ��
}
//�����ַ���
void?USART_SendString(USART_TypeDef?*?pUSARTx,char?*str)
{
unsigned?int?k=0;
do
{
Usart_SendByte(pUSARTx,*(str+k));
k++;
}while(*(str+k)!='\0');
//?�ȴ��������
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);
}
//�뼶����ʱ
void?delay_us(uint32_t?delay_s)
{????
??volatile?unsigned?int?i;
??volatile?unsigned?int?t;
??for?(i?=?0;?i?<?delay_s;?i++)
??{
????t?=?11;
????while?(t?!=?0)
????{
??????t--;
????}
??}
}
//���뼶����ʱ����
void?delay_ms(uint16_t?delay_ms)
{????
??volatile?unsigned?int?num;
??for?(num?=?0;?num?<?delay_ms;?num++)
??{
????delay_us(1000);
??}
}
//����Ƕ�������жϿ�����NVIC
static?void?NVIC_Configuration(void)
{
??NVIC_InitTypeDef?NVIC_InitStructure;
??
??//?Ƕ�������жϿ�������ѡ��
??NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
??
??//?����USARTΪ�ж�Դ
??NVIC_InitStructure.NVIC_IRQChannel?=?DEBUG_USART_IRQ;
??//?�������ȼ�
??NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority?=?1;
??//?�����ȼ�
??NVIC_InitStructure.NVIC_IRQChannelSubPriority?=?1;
??//?ʹ���ж�
??NVIC_InitStructure.NVIC_IRQChannelCmd?=?ENABLE;
??//?��ʼ������NVIC
??NVIC_Init(&NVIC_InitStructure);
}
//����DEBUG_USART_Config����������ǰ������
//�����ж����ȼ�����
NVIC_Configuration();
//ʹ�ܴ��ڽ����ж�
USART_ITConfig(DEBUG_USARTx,USART_IT_RXNE,ENABLE);
main.c:
#include?"stm32f10x.h"
#include?"./uart/bsp_usart.h"
//?���ջ���,���100���ֽ�
uint8_t?USART_RX_BUF[100];
//?����״̬���λ
uint16_t?USART_RX_FLAG=0;
//�����жϷ�����
void?DEBUG_USART_IRQHandler(void)
{
uint8_t?temp;
//�����ж�
if(USART_GetFlagStatus(DEBUG_USARTx,?USART_IT_RXNE)?!=?RESET)
{
//?��ȡ���յ�����
temp?=?USART_ReceiveData(DEBUG_USARTx);
//������
if((USART_RX_FLAG?&?0x8000)==0)
{
//���յ���0x0d
if(USART_RX_FLAG?&?0x4000)
{
//?���մ���,���¿�ʼ
if(temp?!=?0x0a)?USART_RX_FLAG=0;
//?�������
else?USART_RX_FLAG?|=?0x8000;
}
//?��δ���յ�0x0d
else
{
if(temp?==?0x0d)
{
USART_RX_FLAG?|=?0x4000;
}
else
{
USART_RX_BUF[USART_RX_FLAG?&?0x3FFF]=temp;
USART_RX_FLAG++;
//�������ݴ���,���¿�ʼ����
if(USART_RX_FLAG?>?99)?USART_RX_FLAG=0;
}
}
}
}
}
int?main(void)
{
uint8_t?len=0;
uint8_t?i=0;
//?USART��ʼ��
USART_Config();
while(1)
{
if(USART_RX_FLAG?&?0x8000)
{
//?��ȡ���յ������ݳ���
len?=?USART_RX_FLAG?&?0x3FFF;
USART_SendString(DEBUG_USARTx,?"������Ϣ:\n");
for(i=0;?i<len;i++)
{
//?�ڷ�������
USART_SendData(DEBUG_USARTx,?USART_RX_BUF[i]);
//�ȴ����ͽ���
while(USART_GetFlagStatus(DEBUG_USARTx,?USART_FLAG_TC)!=SET);
}
USART_SendString(DEBUG_USARTx,?"\n\n");
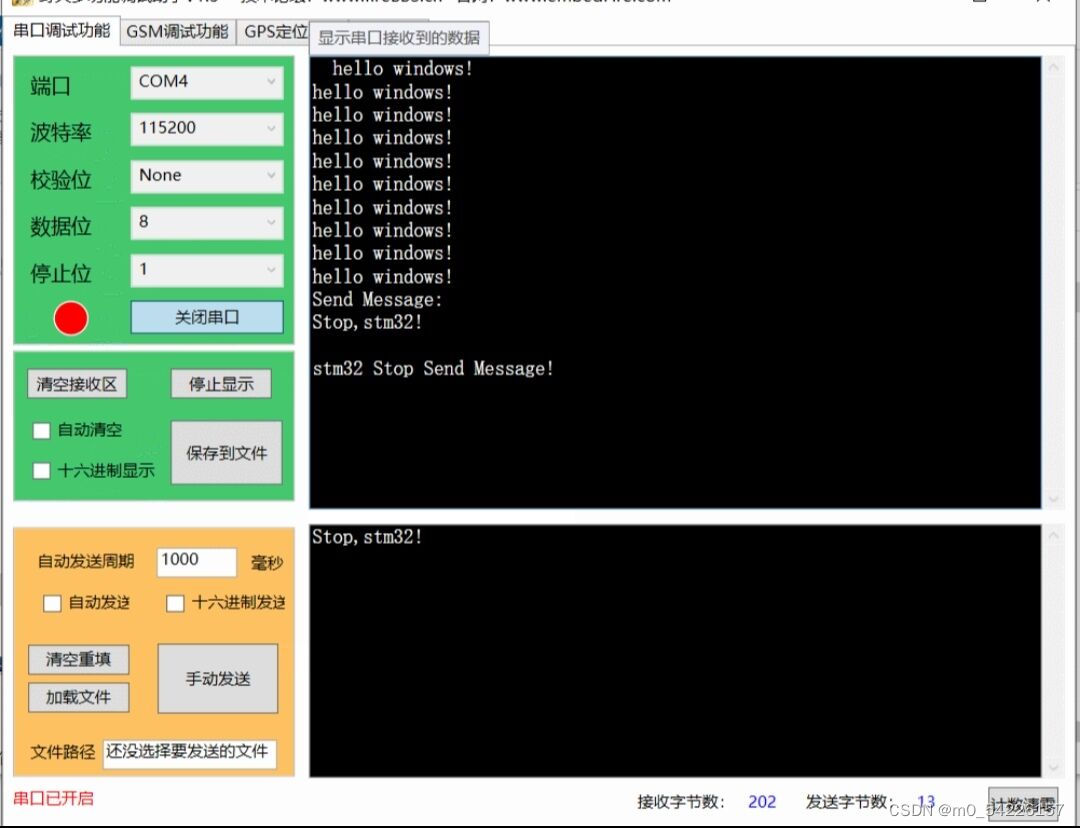
if(strcmp((char?*)USART_RX_BUF,"Stop,stm32!")==0)
{
USART_SendString(DEBUG_USARTx,?"stm32��ֹͣ����!");
break;
}
USART_RX_FLAG=0;
memset(USART_RX_BUF,0,sizeof(USART_RX_BUF));
}
else
{
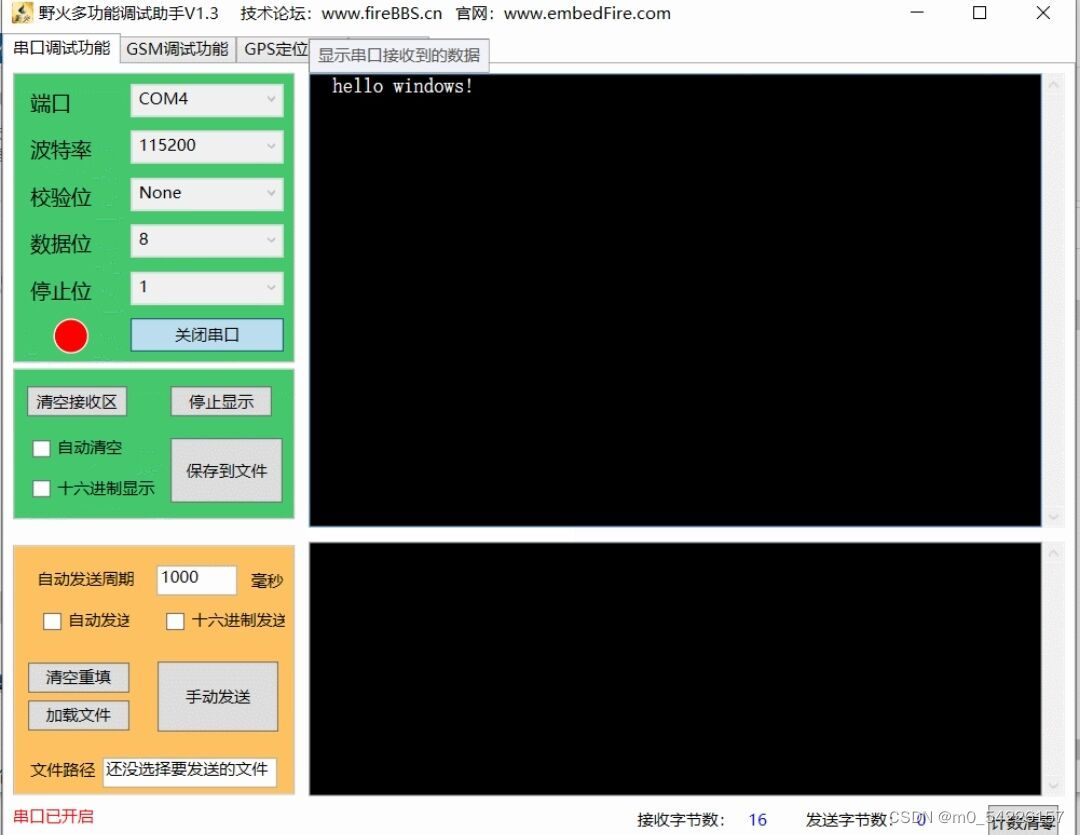
USART_SendString(DEBUG_USARTx,?"hello?windows!\n");
delay_ms(800);
}
}
}
��.���
��¼
![]()
?������
?
?3.?STM32���ô���DMA��ʽ,��115200bps�������������λ�������������ݡ�
һ.������Ŀ
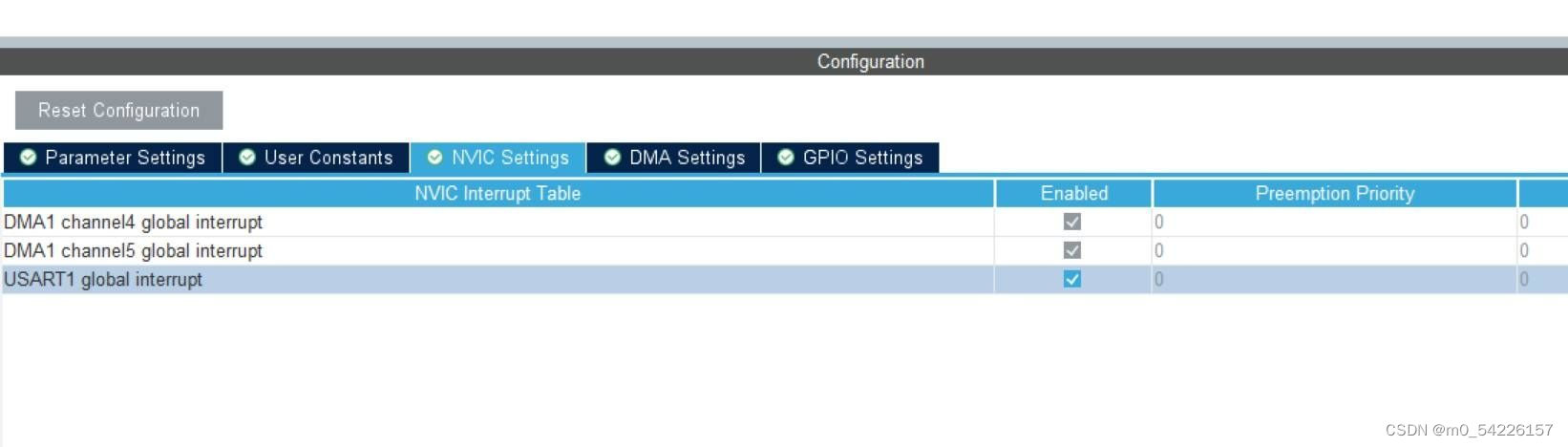
��USART1��DMAģʽ,��DMA?setting���Add

?
?����DMA����
��Pinout&Configuration�CConnectivity�CUSART1�CNVIC?Settings�д��ж�
��.�����
�ĵڶ���ʵ���д��뼴��
��whileѭ��������
HAL_UART_Transmit_DMA(&huart1,Senbuff,?sizeof(Senbuff));
???HAL_Delay(1000);
��.���
?