1)ЪЕбщЦНЬЈ:е§ЕудзгMiniPro H750ПЊЗЂАх
2)ЦНЬЈЙКТђЕижЗ:https://detail.tmall.com/item.htm?id=677017430560
3)ШЋЬзЪЕбщдДТы+ЪжВс+ЪгЦЕЯТдиЕижЗ:http://www.openedv.com/thread-336836-1-1.html
4)Жде§ЕудзгSTM32ИааЫШЄЕФЭЌбЇПЩвдМгШКЬжТл:879133275
ЕкСљЪЎвЛеТ UCOSIIЪЕбщ1-ШЮЮёЕїЖШ
ЧАУцЮвУЧЫљгаЕФР§ГЬЖМЪЧХмТуЛњГЬађ,МђГЦТуХм,ДгБОеТПЊЪМ,ЮвУЧНЋЗж3ИіеТНкЯђДѓМвНщЩмUCOSII(ЪЕЪБЖрШЮЮёВйзїЯЕЭГФкКЫ)ЕФЪЙгУЁЃБОеТ,ЮвУЧНЋЯђДѓМвНщЩмUCOSIIзюЛљБОвВЪЧзюживЊЕФгІгУ:ШЮЮёЕїЖШЁЃ
БОеТЗжЮЊШчЯТМИИіаЁНк:
61.1ЧЖШыЪНЪЕЪБВйзїЯЕЭГНщЩм
61.2 гВМўЩшМЦ
61.3 ГЬађЩшМЦ
61.4 ЯТдибщжЄ
61.1 ЧЖШыЪНЪЕЪБВйзїЯЕЭГНщЩм
61.1.1 ТуЛњЯЕЭГКЭЖрШЮЮёЯЕЭГЕФЧјБ№
дкЧЖШыЪНЩшБИЕФПЊЗЂЙ§ГЬжа,ЮвУЧЪЙгУЕФЪЧСНжжГЬађ,вЛЪЧТуЛњГЬађ,ЧАУцЫљгаЕФЪЕбщеТНкЪЙгУЕФЖМЪЧЪЙгУТуЛњГЬађ;ЖўЪЧЖрШЮЮёГЬађ,МДНгЯТРДЕФШ§еТЖМЪЧЖрШЮЮёГЬађЁЃКмЖрШЫЛсгавЩЮЪгУЕУКУКУЕФТуЛњГЬађ,ЮЊЪВУДвЊгУЖрШЮЮёГЬађФи?
ТуЛњГЬађзюДѓЕФЬиЕу,ОЭЪЧжїКЏЪ§жаЛсгавЛИіДѓбЛЗ,ДѓбЛЗжаОЭЛсгаКмЖрИіаЁШЮЮёЕФЪЕЯжЁЃШЮЮёМфЪЧАДееЫГађНјаажДааЕФ,ЛЛОфЛАРДЫЕЫќУЧжДааЕШМЖЪЧвЛбљЕФ,ЯТвЛИіШЮЮёЯывЊжДааБиаыЕШЩЯвЛИіШЮЮёжДааЭъГЩВХФмНјааЁЃетИідЫаазХЕФДѓбЛЗЮвУЧГЦжЎЮЊКѓЬЈГЬађЁЃжаЖЯЪЧПЩвдДђЖЯЯЕЭГЕБЧАЕФКѓЬЈШЮЮёгХЯШБЛжДаа,ЕШД§жДааЭъКѓ,дйЛиЕНдРДКѓЬЈБЛДђЖЯДІМЬајжДааКѓЬЈГЬађ,жаЖЯДІРэГЬађГЦжЎЧАЬЈГЬађЁЃетжжЪЙгУЧАКѓЬЈТуЛњГЬађЕФНазіЧАКѓЬЈЯЕЭГ,ШчЯТЭМЫљЪО:
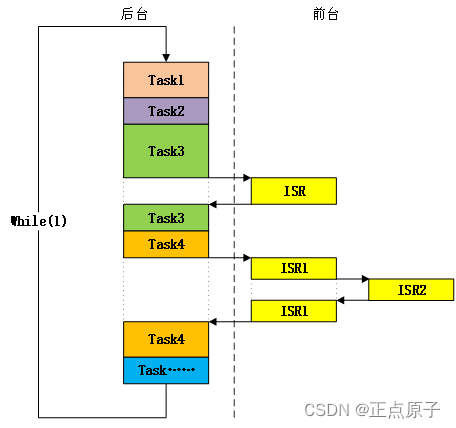
ЭМ61.1.1.1 ЧАКѓЬЈЯЕЭГ
етбљЕФЧАКѓЬЈЯЕЭГдкЪЕЪБадДІРэЗНБуДцдкШБЯн,Р§ШчTask1ЪЧживЊШЮЮё,ашвЊФмЙЛЕУЕНМАЪБЕФЯьгІ,ЕЋЪЧдкжДааTask3ЕФЪБКђ,ВњЩњжаЖЯЁЃЯждкЕФЧщПіЪЧжДааTask1ЬѕМўТњзу,РэЯыЕФДІРэЗНЪНОЭЪЧTask1ашвЊСЂПЬБЛжДаа,ЕЋЪЧЧАКѓЬЈГЬађжазіВЛЕН,вђЮЊШЮЮёЪЧБЛЫГађжДааЕФ,МДЪЙTask1ЪЎЭђЛ№МБ,вВБиаывЊЕШД§Task3ДІРэЭъБЯВХФмБЛжДааЁЃ
ЧАУцЕФЧщПіЖдгквЊЧѓЪЕЪБадБШНЯЧПЕФВњЦЗРДЫЕ,ЪЧВЛдЪаэЕФЁЃЫљвдГіЯжСЫЖрШЮЮёГЬађ,етжжЪЙгУЖрШЮЮёГЬађЕФЯЕЭГ,НазіЧЖШыЪНЪЕЪБВйзїЯЕЭГЁЃЫќАбШЮЮёЗжЮЊВЛЭЌЕФгХЯШМЖ,ЕБдЫааЬѕМўБЛТњзуЪБ,ИпгХЯШМЖШЮЮёПЩвдДђЖЯЕЭгХЯШМЖШЮЮёгХЯШдЫаа,ДгЖјМЋДѓЕиЬсИпСЫЯЕЭГЕФЪЕЪБадЁЃЧЖШыЪНЪЕЪБВйзїЯЕЭГжДааШЮЮёЪОвтЭМШчЭМ61.1.1.2ЫљЪО:
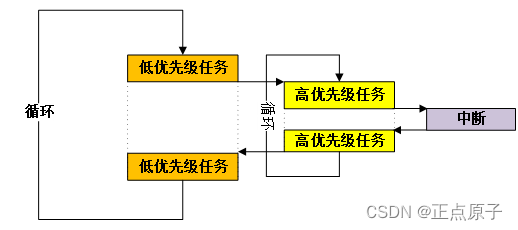
ЭМ61.1.1.2 ЧЖШыЪНЪЕЪБВйзїЯЕЭГжДааШЮЮёЪОвтЭМ
ЧЖШыЪНЪЕЪБВйзїЯЕЭГЯрБШЧАКѓЬЈЯЕЭГУїЯдЬхЯждкЪЕЪБадЗНУц,ЭЌЪБЫќдкЖрШЮЮёЙмРэЁЂШЮЮёМфЭЈаХЁЂФкДцЙмРэЁЂЖЈЪБЦїЙмРэЁЂЩшБИЙмРэЕШЗНУцвВЬсЙЉСЫвЛЬзЭъећЕФЛњжЦ,МЋДѓГЬЖШЩЯБуРћСЫЧЖШыЪНгІгУГЬађЕФПЊЗЂЁЂЙмРэКЭЮЌЛЄЁЃ
61.1.2 UCOSIIНщЩм
ЯждкЪаУцЩЯгааэЖрЪЕЪБВйзїЯЕЭГ,ЙњЭтЕФЪЕЪБВйзїЯЕЭГОЭгаFreeRTOS,UCOSКЭRTX,ЙњФкЕФЪЕЪБВйзїЯЕЭГОЭгаRT_ThreadЁЂLiteOSЕШЁЃЦфжаFreeRTOSЪЙгУТЪЪРНчзюИп,UCOSЗЂеЙРњЪЗзюгЦОУЁЃдкетРяЮвУЧжївЊЪЧЖдUCOSIIНјаабЇЯАЁЃ
UCOSII,ШЋГЦЪЧMicro Control Operation System Two,ЪЧгЩMicriumЙЋЫОЬсЙЉ,ЪЧвЛИіПЩвЦжВЁЂПЩЙЬЛЏЁЂПЩВУМєЕФЁЂеМЯШЪНЖрШЮЮёЪЕЪБФкКЫ,ЫќЪЪгУгкЖржжЮЂДІРэЦї,ЮЂПижЦЦїКЭЪ§зжДІРэаОЦЌЁЃдчдк1992ФъОЭгЩУРЙњЧЖШыЪНзЈМвJean J.LabrosseдкЁЖЧЖШыЪНЯЕЭГБрГЬЁЗдгжОжаЬсГі,ВЂЙЋВМдДТыЁЃUCOSIIжЛЪЧвЛИіЪЕЪБВйзїЯЕЭГФкКЫ,ЫќНіНіАќКЌСЫШЮЮёЕїЖШ,ШЮЮёЙмРэ,ЪБМфЙмРэ,ФкДцЙмРэКЭШЮЮёМфЕФЭЈаХКЭЭЌВНЕШЛљБОЙІФмЁЃУЛгаЬсЙЉЪфШыЪфГіЙмРэ,ЮФМўЯЕЭГ,ЭјТчЕШЖюЭтЕФЗўЮёЁЃИУЪЕЪБЯЕЭГЪЎЗжЪЪКЯГѕДЮНгДЅЧЖШыЪНЪЕЪБВйзїЯЕЭГЕФХѓгбЁЃ
БОеТЪЕбщжаЮвУЧЪЙгУЕФЪЧUCOSII V2.91АцБО,ЫќЕФЬхЯЕНсЙЙШчЭМ61.1.2.1ЫљЪОЁЃИУАцБОБШдчЦкЕФUCOSII(ШчV2.52)ЖрСЫКмЖрЙІФм,БШШчШэМўЖЈЪБЦї,жЇГжШЮЮёЪ§зюДѓДяЕН255ИіЕШ,ЖјЧваое§СЫКмЖрвбжЊBUGЁЃ
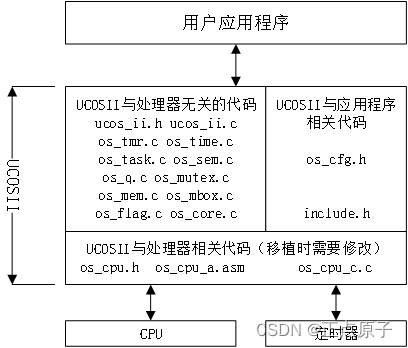
ЭМ61.1.2.1 UCOSIIЬхЯЕНсЙЙЭМ
ДгЩЯЭМПЩвдПДГі,UCOSIIЕФвЦжВ,ЮвУЧжЛашвЊаоИФ:os_cpu.hЁЂos_cpu_a.asmКЭos_cpu.cШ§ИіЮФМўМДПЩ,Цфжаos_cpu.hЪЧНјааЪ§ОнРраЭЕФЖЈвхвдМАДІРэЦїЯрЙиДњТыКЭМИИіКЏЪ§даЭ;os_cpu_a.asm,ЪЧвЦжВЙ§ГЬжаашвЊЛуБрЭъГЩЕФвЛаЉКЏЪ§,жївЊОЭЪЧШЮЮёЧаЛЛКЏЪ§;os_cpu.cЖЈвхвЛаЉгУЛЇHOOKКЏЪ§ЁЃ
ЭМжаЖЈЪБЦїЕФзїгУЪЧЮЊUCOSIIЬсЙЉЯЕЭГЪБжгНкХФ,ЪЕЯжШЮЮёЧаЛЛКЭШЮЮёбгЪБЕШЙІФмЁЃетИіЪБжгНкХФгЩOS_TICKS_PER_SEC(дкos_cfg.hжаЖЈвх)ЩшжУ,вЛАуЮвУЧЩшжУUCOSIIЕФЯЕЭГЪБжгНкХФЮЊ1ms~100ms,ОпЬхИљОнФуЫљгУДІРэЦїКЭЪЙгУашвЊРДЩшжУЁЃБОеТ,ЮвУЧРћгУSTM32ЕФSYSTICKЖЈЪБЦїРДЬсЙЉUCOSIIЪБжгНкХФЁЃ
61.1.3 ШЮЮёЖЈвх
дкЧАУцвВЫЕЕНгаШЮЮё,дкЧАУцЕФЖрШЮЮёЯЕЭГжа,ЮвУЧИљОнЙІФмЕФВЛЭЌ,АбећИіЯЕЭГЗжГЩвЛИіИіЖРСЂЧвВЛЮоЗЈЗЕЛиЕФКЏЪ§,етаЉКЏЪ§ГЦЮЊШЮЮёЁЃЖјUCOSIIОЭЪЧвЛИіФмЖдетаЉШЮЮёЕФдЫааНјааЙмРэКЭЕїЖШЕФЖрШЮЮёВйзїЯЕЭГЁЃUCOSIIзюДѓжЇГжЕФШЮЮёЪ§ДяЕНСЫ255Иі,ЕЋЪЧЖдгкЮвУЧРДЫЕвЛАу64ИіШЮЮёвбОзуЙЛЁЃ
ШЮЮёРраЭгаСНжж:вЛжжЪЧЯЕЭГШЮЮё,СэвЛжжЪЧгУЛЇШЮЮёЁЃгЩЯЕЭГЬсЙЉЕФШЮЮёНаЯЕЭГШЮЮё,гЩгУЛЇБраДЕФШЮЮёНагУЛЇШЮЮёЁЃЯЕЭГШЮЮёЪЧЮЊгІгУГЬађЬсЙЉФГжжЗўЮёЛђЮЊЯЕЭГБОЩэЗўЮёЕФЁЃUCOSIIОпга2ИіЯЕЭГШЮЮё,МДПеЯаШЮЮёКЭЭГМЦШЮЮё,еМгУзюЕЭ2ИігХЯШМЖЁЃПеЯаШЮЮёЪЧUCOSIIгХЯШМЖзюЕЭЕФШЮЮё,ЕБЫљгаЦфЫћШЮЮёОљУЛгаЪЙгУCPUЪБ,ПеЯаШЮЮёОЭЛсеМгУCPUЁЃЭГМЦШЮЮёЪЧUCOSIIгХЯШМЖЕЙЪ§ЕкЖўЕЭЕФШЮЮё,гУгкЭГМЦCPUЕФЪЙгУТЪКЭИїИіШЮЮёЕФЖбеЛЪЙгУЧщПіЁЃ
ЯрЖдгкЯЕЭГШЮЮёЖјбд,ЮвУЧПЊЗЂепгУЕУЖрЕФОЭЪЧгУЛЇШЮЮёЁЃгУЛЇШЮЮёашвЊзЂвтЕФЪЧ:гУЛЇШЮЮёЖдгІЕФКЏЪ§ЪЧвЛИіДјгаЮоЯобЛЗЬхЕФКЏЪ§,УЛгаЗЕЛижЕ;УПвЛИігУЛЇШЮЮёОпгаЮЈвЛЕФгХЯШМЖКХЁЃ
ЪЕЪБВйзїЯЕЭГЮЊСЫИќКУЕФЕїЖШШЮЮё,ИјУПвЛИіШЮЮёЖМЖЈвхСЫвЛИіШЮЮёПижЦПщTCB(Task Control Block)ЁЃетИіШЮЮёПижЦПщОЭЯрЕБгкШЮЮёдкЯЕЭГРяЕФЩэЗнжЄ,ДцЗХзХШЮЮёЕФЫљгааХЯЂ,БШШчШЮЮёКЏЪ§жИеы,ШЮЮёЖбеЛжИеы,ШЮЮёгХЯШМЖЕШЁЃ
гЩгкCPUжЛгавЛИі,ЫљвдвЛИіЪБПЬжЛЛсгавЛИіШЮЮёеМгУCPUДІгкдЫаазДЬЌ,ЖјЦфЫћШЮЮёжЛФмДІгкЦфЫћзДЬЌЁЃUCOSIIЯЕЭГжаЕФШЮЮёОпга5жж,ЯЕЭГдЫааЦ№РДЕФЪБКђ,УПвЛИіШЮЮёЖМДІдквдЯТ5жжзДЬЌжЎвЛЕФзДЬЌЯТ,ет5жжзДЬЌЗжБ№ЪЧЫЏУпзДЬЌЁЂОЭаїзДЬЌЁЂдЫаазДЬЌЁЂЕШД§зДЬЌКЭжаЖЯЗўЮёзДЬЌЁЃ
ЫЏУпзДЬЌ,ШЮЮёдкУЛгаБЛХфБИШЮЮёПижЦПщЛђБЛАўЖсСЫШЮЮёПижЦПщЪБЕФзДЬЌЁЃ
ОЭаїзДЬЌ,ЯЕЭГЮЊШЮЮёХфБИСЫШЮЮёПижЦПщЧвдкШЮЮёОЭаїБэжаНјааСЫОЭаїЕЧМЧ,ШЮЮёвбОзМБИКУСЫ,ЕЋгЩгкИУШЮЮёЕФгХЯШМЖБШе§дкдЫааЕФШЮЮёЕФгХЯШМЖЕЭ,ЛЙднЪБВЛФмдЫаа,етЪБШЮЮёЕФзДЬЌНазіОЭаїзДЬЌЁЃ
дЫаазДЬЌ,ИУШЮЮёЛёЕУCPU ЪЙгУШЈ,ВЂе§дкдЫаажа,ДЫЪБЕФШЮЮёзДЬЌНазідЫаазДЬЌЁЃ
ЕШД§зДЬЌ,е§дкдЫааЕФШЮЮё,ашвЊЕШД§вЛЖЮЪБМфЛђашвЊЕШД§вЛИіЪТМўЗЂЩњдйдЫааЪБ,ИУШЮЮёОЭЛсАбCPU ЕФЪЙгУШЈШУИјБ№ЕФШЮЮёЖјЪЙШЮЮёНјШыЕШД§зДЬЌЁЃ
жаЖЯЗўЮёзДЬЌ,вЛИіе§дкдЫааЕФШЮЮёвЛЕЉЯьгІжаЖЯЩъЧыОЭЛсжажЙдЫааЖјШЅжДаажаЖЯЗўЮёГЬађ,етЪБШЮЮёЕФзДЬЌНазіжаЖЯЗўЮёзДЬЌЁЃ
UCOSIIШЮЮёЕФ5ИізДЬЌзЊЛЛЙиЯЕШчЭМ61.1.3.1ЫљЪО:
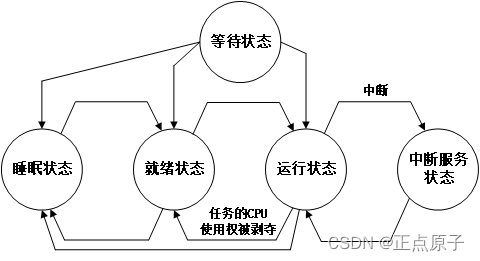
ЭМ61.1.3.1 UCOSIIШЮЮёзЊЛЛЙиЯЕ
61.1.4 ШЮЮёЕїЖШ
UCOSIIЕФШЮЮёЕїЖШЫМЯыЪЧ:ЁАНќЫЦУПЪБУППЬШУгХЯШМЖзюИпЕФОЭаїШЮЮёДІгкдЫаазДЬЌЁБЁЃдкОпЬхзіЗЈЩЯ,ЫќдкЯЕЭГЛђепгУЛЇШЮЮёЕїгУЯЕЭГКЏЪ§МАжДаажаЖЯЗўЮёГЬађНсЪјЪБРДЕїгУЕїЖШЦї,вдШЗЖЈгІИУдЫааЕФШЮЮёВЂдЫааЫќЁЃ
дкЖрШЮЮёЯЕЭГжа,СюCPUжажЙЕБЧАе§дкдЫааЕФШЮЮёзЊЖјШЅдЫааСэвЛИіШЮЮёЕФЙЄзїНаШЮЮёЧаЛЛ,ЖјАДееФГжжЙцдђНјааШЮЮёЧаЛЛЕФЙЄзїНазіШЮЮёЕїЖШЁЃ
дкUCOSIIжа,ШЮЮёЕїЖШЪЧгЩШЮЮёЕїЖШЦїРДЭъГЩЁЃШЮЮёЕїЖШЦїЕФжївЊЙЄзїОЭгаСНИі,ЂйдкШЮЮёОЭаїБэжаВщевОпгазюИпгХЯШМЖБ№ЕФОЭаїШЮЮё ЂкЪЕЯжШЮЮёЧаЛЛ
61.2 гВМўЩшМЦ
- Р§ГЬЙІФм
БОЪЕбщЮвУЧдкUCOSIIРяУцДДНЈ3ИіШЮЮё:ПЊЪМШЮЮёЁЂLED0ШЮЮёКЭLED1ШЮЮё,ПЊЪМШЮЮёгУгкДДНЈЦфЫћ(LED0КЭLED1)ШЮЮё,жЎКѓЙвЦ№;LED0ШЮЮёгУгкПижЦLED0ЕФССУ№,LED0УПУыжгСС80ms;LED1ШЮЮёгУгкПижЦLED1ЕФССУ№,LED1СС300ms,У№300ms,вРДЮбЛЗЁЃ - гВМўзЪдД
1)RGBЕЦ
RED :LED0 - PB4
GREEN :LED1 - PE6
61.3 ГЬађЩшМЦ
61.3.1 UCOSIIקƏʏڧ
дкетРяжївЊЖдБОЪЕбщгУЕНЕФUCOSIIЧ§ЖЏКЏЪ§НјааНщЩмЁЃ - OSTaskCreateExtКЏЪ§
ДДНЈШЮЮёКЏЪ§,ИУКЏЪ§ЪЧOSTaskCreateКЏЪ§ЕФРЉеЙ,ВЂЬсЙЉСЫвЛаЉИНМгЙІФмЁЃOSTaskCreateExtКЏЪ§ДДНЈШЮЮёИќМгСщЛю,ВЛЙ§ЛсдіМгвЛаЉЖюЭтЕФПЊЯњЁЃЦфЩљУїШчЯТ:
INT8U OSTaskCreateExt (void (*task)(void *p_arg),
void *p_arg,
OS_STK *ptos,
INT8U prio,
INT16U id,
OS_STK *pbos,
INT32U stk_size,
void *pext,
INT16U opt)
?КЏЪ§УшЪі:
гУгкДДНЈвЛИіШЮЮё
?КЏЪ§аЮВЮ:
OSTaskCreatExКЏЪ§ЕФ9ИіаЮВЮНщЩм,ШчБэ61.3.1.1ЫљЪО:
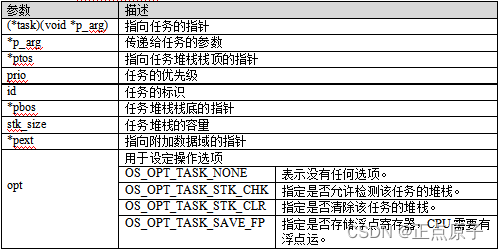
Бэ61.3.1.1 OSTaskCreatExКЏЪ§ЕФ9ИіаЮВЮНщЩм
?КЏЪ§ЗЕЛижЕ:
OS_ERR_NONE:КЏЪ§ЕїгУГЩЙІ
OS_ERR_PRIO_EXIST:ОпгаИУгХЯШМЖЕФШЮЮёвбОДцдк
OS_ERR_PRIO_INVALID:ВЮЪ§жИЖЈЕФгХЯШМЖДѓгкзюДѓгХЯШМЖ
OS_ERR_TASK_CREATE_ISR:дкISRжаДДНЈШЮЮё
OS_ERR_ILLEGAL_CREATE_RUN_TIME:ГЂЪддкАВШЋЙиМќВйзїЦєЖЏКѓДДНЈШЮЮё
?зЂвтЪТЯю:
1ЁЂШЮЮёБиаыБЛДДНЈдкЖрШЮЮёПЊЪМжЎЧАЛђепдЫааЕФШЮЮёжа
2ЁЂШЮЮёВЛФмгЩISRДДНЈ
3ЁЂШЮЮёБиаыдкЫРбЛЗжа,ВЂЧвВЛФмЗЕЛи
2. OSTaskSuspendКЏЪ§
ШЮЮёЙвЦ№КЏЪ§,ЦфЩљУїШчЯТ:
INT8U OSTaskSuspend (INT8U prio)
?КЏЪ§УшЪі:
гУгкНЋШЮЮёЙвЦ№
?КЏЪ§аЮВЮ:
Prio:вЊЙвЦ№ШЮЮёЕФгХЯШМЖЁЃ
?КЏЪ§ЗЕЛижЕ:
OS_ERR_NONE:КЏЪ§ЕїгУГЩЙІ
OS_ERR_TASK_SUSPEND_IDLE:ЙвЦ№ПеЯаШЮЮё
OS_ERR_PRIO_INVALID:ВЮЪ§жИЖЈЕФгХЯШМЖДѓгкзюДѓгХЯШМЖ
OS_ERR_TASK_SUSPEND_PRIO:ашвЊЙвЦ№ЕФШЮЮёВЛДцдк
OS_ERR_TASK_NOT_EXITS:ШЮЮёБЛЗжХфЕНвЛИіЛЅГтжДаа
3. OSTaskDelКЏЪ§
ЩОГ§ШЮЮёКЏЪ§,ЦфЩљУїШчЯТ:
INT8U OSTaskDel (INT8U prio)
?КЏЪ§УшЪі:
гУгкЩОГ§ШЮЮё
?КЏЪ§аЮВЮ:
Prio:вЊЩОГ§ШЮЮёЕФгХЯШМЖЁЃШчЙћШЮЮёВЛжЊЕРздМКгХЯШМЖ,ЛЙПЩвдДЋЕнВЮЪ§OS_PRIO_SELFЁЃБЛЩОГ§ЕФШЮЮёНЋЛиЕНанУпзДЬЌЁЃ
?КЏЪ§ЗЕЛижЕ:
OS_ERR_NONE:КЏЪ§ЕїгУГЩЙІ
OS_ERR_TASK_DEL_IDLE:ЩОГ§ПеЯаШЮЮё
OS_ERR_PRIO_INVALID:ВЮЪ§жИЖЈЕФгХЯШМЖДѓгкзюДѓгХЯШМЖ
OS_ERR_TASK_DEL:ШЮЮёБЛЗжХфИјЛЅГтСПжДаа
OS_ERR_TASK_NOT_EXIST:вЊЩОГ§ЕФШЮЮёВЛДцдк
OS_ERR_TASK_DEL_ISR:дкжаЖЯДІРэКЏЪ§жаЩОГ§ШЮЮё
4.OSInitКЏЪ§
UCOSIIЯЕЭГГѕЪМЛЏКЏЪ§,ЦфЩљУїШчЯТ:
void OSInit (void)
?КЏЪ§УшЪі:
гУгкГѕЪМЛЏUCOSIIФкВП
?КЏЪ§аЮВЮ:Юо
?КЏЪ§ЗЕЛижЕ:Юо
5. OSStartКЏЪ§
ЖрШЮЮёЦєЖЏКЏЪ§,ЦфЩљУїШчЯТ:
void OSStart (void)
?КЏЪ§УшЪі:
гУгкгУгкЦєЖЏЖрШЮЮё
?КЏЪ§аЮВЮ:Юо
?КЏЪ§ЗЕЛижЕ:Юо
?зЂвтЪТЯю:
ЖрШЮЮёЕФЕФЦєЖЏЪЧЭЈЙ§ЕїгУOSStartЪЕЯжЕФ,ЖјдкЦєЖЏUCOSIIжЎЧАжСЩйашвЊНЈСЂвЛИігІгУШЮЮёЁЃ
61.3.2 ГЬађСїГЬЭМ
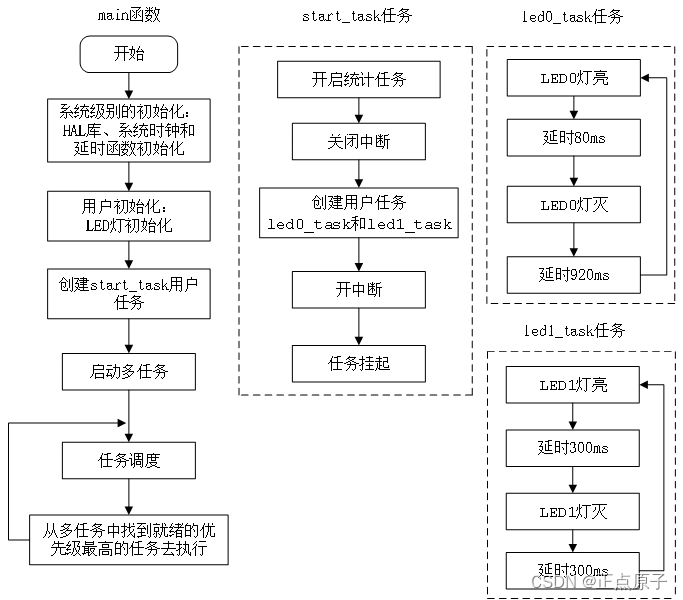
ЭМ61.3.2.1 UCOSIIШЮЮёЕїЖШЪЕбщ
61.3.3 ГЬађНтЮі
дкSTM32ЩЯдЫааUCOSIIЕФВНжш:
1ЁЂвЦжВUCOSII
вЊЪЙЕУUCOSIIдкSTM32ЩЯе§ГЃдЫаа,ЪзЯШашвЊвЦжВUCOSII,етВПЗжЮвУЧвбОЮЊДѓМвзіКУСЫЁЃ
етРяЮвУЧашвЊзЂвтЕФвЛИіЕиЗН,SYSTEMЮФМўМаРяУцЕФЯЕЭГКЏЪ§жБНгжЇГжUCOSII,жЛашвЊдкsys.hЮФМўРяНЋ:SYSTEM_SUPPORT_UCOSКъЖЈвхИФЮЊ1,МДПЩЭЈЙ§delay_initКЏЪ§ГѕЪМЛЏUCOSIIЕФЯЕЭГЪБжгНкХФ,ЮЊUCOSIIЬсЙЉЪБжгНкХФЁЃ
2ЁЂБраДШЮЮёКЏЪ§ВЂЩшжУЦфЖбеЛДѓаЁКЭгХЯШМЖЕШВЮЪ§
БраДШЮЮёКЏЪ§,вдБуUCOSIIЕїгУЁЃ
ЩшжУКЏЪ§ЖбеЛДѓаЁ,етИіашвЊИљОнКЏЪ§ЕФашЧѓРДЩшжУ,ШчЙћШЮЮёКЏЪ§ЕФОжВПБфСПЖр,ЧЖЬзВуЪ§Жр,ФЧУДЖдгІЕФЖбеЛОЭЕУДѓвЛаЉ,ШчЙћЖбеЛЩшжУаЁСЫ,КмПЩФмГіЯжЕФНсЙћОЭЪЧCPUНјШыHardFault,гіЕНетжжЧщПі,ФуОЭБиаыАбЖбеЛЩшжУДѓвЛЕуСЫЁЃСэЭт,гааЉЕиЗНЛЙашвЊзЂвтЖбеЛзжНкЖдЦыЕФЮЪЬт,ШчЙћШЮЮёдЫааГіЯжФЊУћЦфУюЕФДэЮѓ(БШШчгУЕНsprintfГіДэ),ЧыПМТЧЪЧВЛЪЧзжНкЖдЦыЕФЮЪЬтЁЃ
ЩшжУШЮЮёгХЯШМЖ,етИіашвЊДѓМвИљОнШЮЮёЕФживЊадКЭЪЕЪБадЩшжУ,МЧзЁИпгХЯШМЖЕФШЮЮёгагХЯШЪЙгУCPUЕФШЈСІЁЃ
3ЁЂГѕЪМЛЏUCOSII,ВЂдкUCOSIIжаДДНЈШЮЮё
ЕїгУOSInit,ГѕЪМЛЏUCOSII,ЭЈЙ§ЕїгУOSTaskCreateКЏЪ§ДДНЈЮвУЧЕФШЮЮёЁЃ
4ЁЂЦєЖЏUCOSII
ЕїгУOSStart,ЦєЖЏUCOSIIЁЃ
ЭЈЙ§вдЩЯ4ИіВНжш,UCOSIIОЭПЊЪМдкSTM32ЩЯУцдЫааСЫ,етРяЛЙашвЊзЂвтЮвУЧБиаыЖдos_cfg.hНјааВПЗжХфжУ,вдТњзуЮвУЧЕФашЧѓЁЃ
main.cДњТы
дкmain.cЮФМўЯТ,Г§СЫmainКЏЪ§жЎЭт,ЛЙгаUCOSIIШЮЮёЕФвЛаЉХфжУвдМА3ИіШЮЮёКЏЪ§ЁЃЮвУЧЯШПДвЛЯТUCOSIIШЮЮёЕФвЛаЉКъЖЈвх,ШчЯТДњТыЫљЪО:
/* UCOSIIШЮЮёЩшжУ */
/* START ШЮЮё ХфжУ
* АќРЈ: ШЮЮёгХЯШМЖ ЖбеЛДѓаЁ ЕШ
*/
#define START_TASK_PRIO 10 /* ПЊЪМШЮЮёЕФгХЯШМЖЩшжУЮЊзюЕЭ */
#define START_STK_SIZE 128 /* ЖбеЛДѓаЁ */
OS_STK START_TASK_STK[START_STK_SIZE]; /* ШЮЮёЖбеЛ */
void start_task(void *pdata); /* ШЮЮёКЏЪ§ */
/* LED0 ШЮЮё ХфжУ
* АќРЈ: ШЮЮёгХЯШМЖ ЖбеЛДѓаЁ ЕШ
*/
#define LED0_TASK_PRIO 7 /* ПЊЪМШЮЮёЕФгХЯШМЖЩшжУЮЊзюЕЭ */
#define LED0_STK_SIZE 128 /* ЖбеЛДѓаЁ */
OS_STK LED0_TASK_STK[LED0_STK_SIZE]; /* ШЮЮёЖбеЛ */
void led0_task(void *pdata); /* ШЮЮёКЏЪ§ */
/* LED1 ШЮЮё ХфжУ
* АќРЈ: ШЮЮёгХЯШМЖ ЖбеЛДѓаЁ ЕШ
*/
#define LED1_TASK_PRIO 6 /* ПЊЪМШЮЮёЕФгХЯШМЖЩшжУЮЊзюЕЭ */
#define LED1_STK_SIZE 128 /* ЖбеЛДѓаЁ */
OS_STK LED1_TASK_STK[LED0_STK_SIZE]; /* ШЮЮёЖбеЛ */
void led1_task(void *pdata); /* ШЮЮёКЏЪ§ */
ЩЯУцОЭЪЧЖдДДНЈетSTART_TASKЁЂLED0_TASKКЭLED1_TASKШ§ИіШЮЮёЕФВЮЪ§НјааХфжУ,Р§ШчгХЯШМЖЁЂЖбеЛДѓаЁКЭШЮЮёКЏЪ§ЁЃ
ЯТУцПДвЛЯТmainжїКЏЪ§ЕФДњТы:
int main(void)
{
sys_cache_enable(); /* ДђПЊL1-Cache */
HAL_Init(); /* ГѕЪМЛЏHALПт */
sys_stm32_clock_init(240, 2, 2, 4); /* ЩшжУЪБжг, 480Mhz */
delay_init(480); /* бгЪБГѕЪМЛЏ */
led_init(); /* ГѕЪМЛЏLED */
OSInit(); /* UCOSГѕЪМЛЏ */
OSTaskCreateExt((void(*)(void *) )start_task, /* ШЮЮёКЏЪ§ */
(void * )0, /* ДЋЕнИјШЮЮёКЏЪ§ЕФВЮЪ§ */
/* ШЮЮёЖбеЛеЛЖЅ */
(OS_STK * )&START_TASK_STK[START_STK_SIZE - 1],
(INT8U )START_TASK_PRIO, /* ШЮЮёгХЯШМЖ */
(INT16U )START_TASK_PRIO,/* ШЮЮёID,етРяЩшжУЮЊКЭгХЯШМЖвЛбљ */
(OS_STK * )&START_TASK_STK[0], /* ШЮЮёЖбеЛеЛЕз */
(INT32U )START_STK_SIZE, /* ШЮЮёЖбеЛДѓаЁ */
(void * )0, /* гУЛЇВЙГфЕФДцДЂЧј */
(INT16U )OS_TASK_OPT_STK_CHK | OS_TASK_OPT_STK_CLR
| OS_TASK_OPT_SAVE_FP);
/* ШЮЮёбЁЯю,ЮЊСЫБЃЯеЦ№Мћ,ЫљгаШЮЮёЖМБЃДцИЁЕуМФДцЦїЕФжЕ */
OSStart(); /* ПЊЪМШЮЮё */
}
дкmainКЏЪ§Ря,ЮвУЧАДееЧАУцЫЕЕФдкSTM32дЫааUCOSIIЕФВНжшНјааВйзї,ПЩвдПДЕНЯШЖдUCOSНјааГѕЪМЛЏ,дйДДНЈstart_taskШЮЮё,зюКѓПЊЪМШЮЮёЁЃ
АДееЧАУцЫљЫЕЕФ,led0_taskКЭled1_taskЪЧдкstart_taskжаДДНЈ,ЯТУцШУЮвУЧПДвЛЯТФЧШ§ИіШЮЮёЕФДњТы:
/**
* @brief ПЊЪМШЮЮё
* @param Юо
* @retval Юо
*/
void start_task(void *pdata)
{
OS_CPU_SR cpu_sr = 0;
pdata = pdata;
OSStatInit(); /* ПЊЦєЭГМЦШЮЮё */
OS_ENTER_CRITICAL(); /* НјШыСйНчЧј(ЙиБежаЖЯ) */
/* LED0ШЮЮё */
OSTaskCreateExt((void(*)(void *) )led0_task,
(void * )0,
(OS_STK * )&LED0_TASK_STK[LED0_STK_SIZE - 1],
(INT8U )LED0_TASK_PRIO,
(INT16U )LED0_TASK_PRIO,
(OS_STK * )&LED0_TASK_STK[0],
(INT32U )LED0_STK_SIZE,
(void * )0,
(INT16U )OS_TASK_OPT_STK_CHK | OS_TASK_OPT_STK_CLR
| OS_TASK_OPT_SAVE_FP);
/* LED1ШЮЮё */
OSTaskCreateExt((void(*)(void *) )led1_task,
(void * )0,
(OS_STK * )&LED1_TASK_STK[LED1_STK_SIZE - 1],
(INT8U )LED1_TASK_PRIO,
(INT16U )LED1_TASK_PRIO,
(OS_STK * )&LED1_TASK_STK[0],
(INT32U )LED1_STK_SIZE,
(void * )0,
(INT16U )OS_TASK_OPT_STK_CHK | OS_TASK_OPT_STK_CLR
| OS_TASK_OPT_SAVE_FP);
OS_EXIT_CRITICAL(); /* ЭЫГіСйНчЧј(ПЊжаЖЯ) */
OSTaskSuspend(START_TASK_PRIO); /* ЙвЦ№ПЊЪМШЮЮё */
}
/**
* @brief LED0ШЮЮё
* @param pdata : ДЋШыВЮЪ§(ЮДгУЕН)
* @retval Юо
*/
void led0_task(void *pdata)
{
while (1)
{
LED0(0);
delay_ms(80);
LED0(1);
delay_ms(920);
}
}
/**
* @brief LED1ШЮЮё
* @param pdata : ДЋШыВЮЪ§(ЮДгУЕН)
* @retval Юо
*/
void led1_task(void *pdata)
{
while (1)
{
LED1(0);
delay_ms(300);
LED1(1);
delay_ms(300);
}
}
ДгЩЯУцЕФДњТыПЩвдПДЕНstart_taskКЏЪ§жаЕФШЗЪЧДДНЈСЫled0_taskКЭled1_taskСНИіШЮЮё,ДДНЈетСНИіШЮЮёКѓ,НЋздМКЙвЦ№ЁЃ
ЮвУЧЕЅЖРДДНЈstart_taskЕФФПЕФЪЧЮЊСЫЬсЙЉвЛИіЕЅвЛШЮЮё,ЪЕЯжгІгУГЬађПЊЪМжЎЧАЕФзМБИЙЄзї,БШШчЭтЩшГѕЪМЛЏ,ДДНЈШЮЮё,ГѕЪМЛЏЭГМЦШЮЮё,вдМАКѓУцНВЕНЕФДДНЈаХКХСПЁЂДДНЈгЪЯфЁЂДДНЈЯћЯЂЖгСаЁЂДДНЈаХКХСПМЏЕШЁЃ
дкгІгУГЬађжаОГЃгавЛаЉДњТыЖЮБиаыВЛЪмШЮКЮИЩШХЕиСЌајдЫаа,етбљЕФДњТыЖЮНазіСйНчЖЮ(ЛђСйНчЧј)ЁЃвђДЫ,ЮЊСЫЪЙСйНчЖЮдкдЫааЪБВЛЪмжаЖЯЫљДђЖЯ,дкСйНчЖЮДњТыЧАБиаыгУЙижаЖЯжИСюЪЙCPUЦСБЮжаЖЯЧыЧѓ,ЖјдкСйНчЖЮДњТыКѓБиаыгУПЊжаЖЯжИСюНгДЅЦСБЮЪЙЕУCPUПЩвдЯьгІжаЖЯЧыЧѓЁЃUCOSIIЬсЙЉOS_ENTER_CRITICAL КЭ OS_EXIT_CRITICAL СНИіКъРДЪЕЯж,етСНИіКъашвЊЮвУЧдквЦжВUCOSIIЕФЪБКђЪЕЯж,БОеТЮвУЧВЩгУЗНЗЈ 3(МД OS_CRITICAL_METHOD ЮЊ3)РДЪЕЯжетСНИіКъЁЃвђЮЊСйНчЖЮДњТыВЛФмБЛжаЖЯДђЖЯ,НЋбЯжигАЯьЯЕЭГЕФЪЕЪБад,ЫљвдСйНчЖЮДњТыдНЖЬдНКУ!
дк start_task ШЮЮёжа,ЮвУЧдкДДНЈ led0_task КЭ led1_task ЕФЪБКђ,ВЛЯЃЭћжаЖЯДђЖЯ,ЙЪЪЙгУСЫСйНчЧјЁЃЦфЫћСНИіШЮЮё,ОЭЪЎЗжМђЕЅСЫ,ЮвУЧОЭВЛЯИЫЕСЫ,зЂвтЮвУЧетРяЪЙгУЕФбгЪБКЏЪ§ЛЙЪЧ delay_ms,ЖјВЛЪЧжБНгЪЙгУЕФ OSTimeDlyЁЃ
СэЭт,вЛИіШЮЮёРяУцвЛАуЪЧБиаыгабгЪБКЏЪ§ЕФ,вдЪЭЗХ CPU ЪЙгУШЈ,ЗёдђПЩФмЕМжТЕЭгХЯШМЖЕФШЮЮёвђИпгХЯШМЖЕФШЮЮёВЛЪЭЗХ CPU ЪЙгУШЈЖјвЛжБЮоЗЈЕУЕН CPU ЪЙгУШЈ,ДгЖјЮоЗЈдЫааЁЃ
61.4 ЯТдибщжЄ
НЋГЬађЯТдиЕНПЊЗЂАхКѓ,ПЩвдПДЕНLED0вЛУыжгЩСвЛДЮ,ЖјLED1дђвдЙЬЖЈЕФЦЕТЪЩСЫИЁЃЫЕУїСНИіШЮЮё(led0_taskКЭled1_task)ЖМвбОе§ГЃдЫаа,ЗћКЯЮвУЧдЄЦкЕФЩшМЦЁЃ