ǰ��:��ǰһƪ��STM32WL����֮������LORA�������ϰ���KEY��������Ӧ�á����Ѿ�������������LoRa������LM401-Pro-Kit����������Demo���������ʵ�ְ���KEY����LED��˸�Ĺ���,���Ľ�������λ���LoRa�������Demo����ʵ�ֶ�ʱ����������Ӧ�á�
����֪ʶ:STM32������������
?????? STM32���ⷨ�뵼�幫˾(ST)����Ƴ���һ����ARM Cortex-M Ϊ�ں˵�32λ��Ƭ�������Կ��Կ���STM32���ں���ARM��˾��,��ARM��˾ֻ����ں˲�����оƬ,����Ҫ����������ǽ��й��ں˵ļ�����Ȩ�����뵼�峧������ʹ������ST��TI,��������̶���������ں�Ϊ����ȥ����Լ�оƬ��������SRAM��ROM��FLASH��USART��GPIO��,Ȼ�����Щ���輯�ɵ�һ����Ƭ��,�����������������ʹ�õ�оƬ������STM32 оƬ�ڲ�Ҳ���µķ�Ϊ������:�ں�+Ƭ�����衣
????????оƬ�ڲ��ܹ�����ͼ��ʾ:
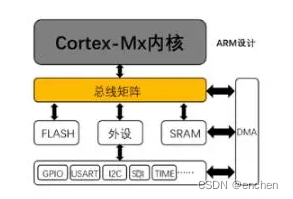
?????????˵����������֪��оƬ�ڲ��ں˺�����ֱ���������˾��Ƶ�,������Ҫ����Эͬ��Ч�Ĺ���,�ͱ����й�ͨ������,��������������ߡ�һ��ļ�����������ɲ��������������������洢���������豸������豸,����֮���ͨ�ſ��ľ������ߡ���Ƭ������һ��С�͵ļ����,�������ڲ�������ͨ��Ҳ�ǿ����ߡ�
?????? ��Ƭ��������һ���Ϊ�ڲ�������ⲿ����,�ڲ�������Ǽ��ɵ�оƬ�ڲ���,�ⲿ������ָ��Ƭ����չ�Ĺ��ܡ���Ƭ���ڲ�������һ�����:���ڿ���ģ��,SPIģ��,I2Cģ��,A/Dģ��,PWMģ��,CANģ��,EEPROM,�Ƚ���ģ��ȵ�,���Ƕ������ڵ�Ƭ���ڲ�,�����Ӧ���ڲ����ƼĴ���,��ͨ����Ƭ��ָ��ֱ�ӿ��ơ�����ָ���ǵ�Ƭ���ⲿ����Χ����ģ��,������̿���оƬ,Һ��,A/Dת��оƬ�ȵȡ������ͨ����Ƭ����I/O,SPI,I2C�����߿��ơ�
?????? STM32оƬ�ڲ��ж��11������,������������ص���Ҫ��AHB���ߺ�APB���ߡ�AHB������һ�ָ�����ϵͳ����,��Ҫ���ڸ�����ģ��(��CPU��DMA��DSP��)֮������ӡ�APB����������,��Ҫ���ڵʹ������ܱ�����֮�������,�ַ�ΪAPB1��APB2���ߡ�APB1�������ӵ��ǵ�������,������Դ�ӿڡ����ݽӿڡ�CAN��USB��I2C1��I2C2��UART2��UART3��,APB2�������ӵ��Ǹ���������� UART1��SPI1��Timer1��ADC1��ADC2��������ͨIO��(PA~PE)���ڶ����� IO �ڵȡ�APB�����������ӵ�AHB�����ϡ�
?????? STM32����IJ�������
?????? STM32�����趼��AHB��APB1��APB2������,����������������:
????????1��������豸����ʹ�ܡ�
????????2�����������ʱ��
????????3����������
?? ??????????????�����������:����GPIO�����衢����GPIO�����衢DMA���жϵ�������ʹ�ܵȡ�
Timer��ʱ��
?????? ��Ƭ���е�Timer�ܶ�ʱ�������ı����� ��ʱ/������ ,ij����������˵Timer������Ĺ��ܾͽ���ֻ�Ǽ�������,��ʱ�������Ҳֻ���ڼ��������������֮��ʵ�ֵġ�
????????��ʱ���������ܵ���������:

??????
ʱ��ϵͳ
?????? STM32��ʱ��ϵͳ��������(�ź�Դ)����ʱ����������Ƶ������ɵĵ�·�����õ��ź�Դ�о���������RC��������������Ҫ������������һ��,ʱ����Ƕ��ʽϵͳ������,�������ں���ʱ�����������ָ��ִ��,״̬�任�ȶ���;���貿����ʱ�ӵ���������ɸ��ֹ���,���紮�����ݵķ��͡�A/Dת������ʱ�������ȡ�
????????STM32�����dz�����,����dz���,����ͬһ����·,ʱ��Խ�칦��Խ��,ͬʱ����Ÿ�������Ҳ��Խ��,����Ҳ���������е����趼��Ҫϵͳʱ����ô�ߵ�Ƶ��,���翴�Ź��Լ�RTCֻ��Ҫ��ʮk��ʱ�Ӽ���,���Զ��ڽϸ��ӵ�MCUһ����ö�ʱ��Դ�ķ��������������⡣
????????STM32WL��ʱ��ϵͳ��ͼ����:
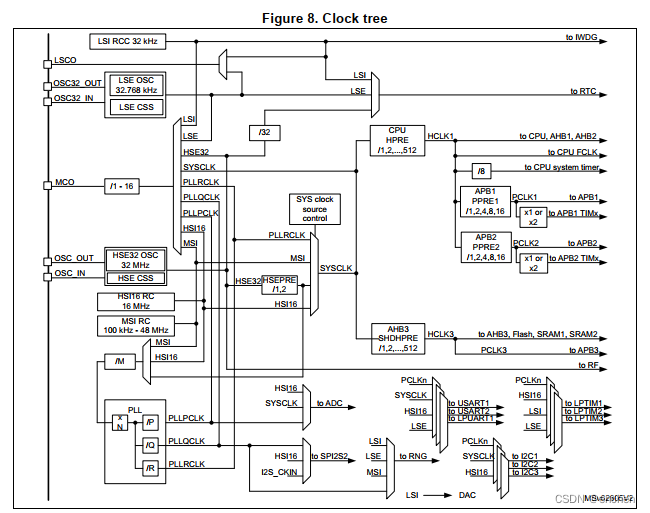
????????����ͼ��ʾ,STM32WL��,��6��Ҫ��ʱ��Դ,ΪHSI��HSE��LSI��LSE��MSI��PLL,ע��STM32WL���STM32Fx��ϵ��оƬ,��PLL���ᆱ��ȥ��PLLISAI1��PLLSAI2��
????????��ʱ��Ƶ�����ֿ��Է�Ϊ����ʱ��Դ�͵���ʱ��Դ;��ʱ��Ƶ�����ֿ��Է�Ϊ����ʱ��Դ�͵���ʱ��Դ;����Դ�ɷ�Ϊ�ⲿʱ��Դ���ڲ�ʱ��Դ,�ⲿʱ��Դ���Ǵ��ⲿͨ���Ӿ���ķ�ʽ��ȡʱ��Դ��
????????LSI �ǵ����ڲ�ʱ��,RC ����,Ƶ��Ϊ 32kHz ���ҡ����������Ź��� RTC �� LCDʹ�á�
????????LSE �ǵ����ⲿʱ��,��Ƶ��Ϊ 32.768kHz ��ʯӢ���塣�����Ҫ�� RTC ��ʱ��Դ��
????????HSE �Ǹ����ⲿʱ��,�ɽ�ʯӢ/�մ�г����,���߽��ⲿʱ��Դ,Ƶ�ʷ�ΧΪ4MHz-48MHz�����ǵĿ�����ӵ��� 8MHz �ľ��� HSE Ҳ����ֱ����Ϊϵͳʱ�ӻ��� PLL ���롣
????????HSI �Ǹ����ڲ�ʱ��,RC ����, Ƶ��Ϊ 16MHz������ֱ����Ϊϵͳʱ�ӻ�������PLL ���롣
????????MSI ʱ���ź����ڲ� RC ������������Ƶ�ʷ�Χ��ͨ��ʱ�ӿ��ƼĴ���(RCC_CR)�е� MSIRANGE[3:0]λ���е�����
????????PLL Ϊ�����Ƶ�����STM32WLֻ��һ��PLLʱ��Դ, PLL���� HSE�� HIS ���� MSI �ṩʱ���ź�,������������ͬ�����ʱ��:
????????1) ���PLLRCLK,�������ɸ��ٵ�ϵͳʱ��(SYSCLK,���48MHz);
????????2)���PLLQCLK,��ΪSPI��RNG���ṩʱ��Դ;
????????3)���PLLPCLK,��ΪADC���ṩʱ��Դ��
????????PLLʱ��ͼ����:
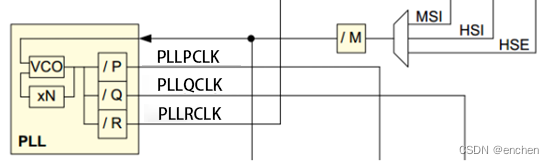
????????��ͼ�п��Կ���,�� PLL ��ʱ��ԴҪ�Ⱦ���һ����Ƶϵ��Ϊ M �ķ�Ƶ��,Ȼ����Ƶϵ��Ϊ N �ı�Ƶ��,����֮����Ҫ������Ƶϵ��Ϊ R(��� PLLR ʱ��)������ P(��� PLLPʱ��)������ Q(��� PLLQ ʱ��),�����������յ��� PLL ʱ�ӡ�
��ʱ��ʱ��Դ
????????��ʱ��Ҫʵ�ּ��������и�ʱ��Դ,������ʱ��ʱ��ֻ�������ڲ�ʱ��,�����ƶ�ʱ����ͨ�ö�ʱ��������ѡ���ⲿʱ��Դ����ֱ������������ʱ���ȴ�ģʽ�����ǿ���ͨ�� RCC ר��ʱ�����üĴ���(RCC_DCKCFGR)�� TIMPREλ�������ж�ʱ����ʱ��Ƶ��,����һ�����ø�λΪĬ��ֵ 0,��ʱ�����ʱ��ʱ��Ϊ 48MHz,��������ʱ�����ڲ�ʱ��(CK_INT)Ƶ��Ϊ 48MHz����ʱ��ʱ��Դһ����˵��������ڲ�ʱ��,����ʱ��������APB1����,������ͨ�ö�ʱ�����ǹ�����APB2�����µ�,�������һϵ�б�Ƶʲô�Ķ���48Mhz,�����������յ�Ƶ�ʻ���Ҫ����PSCԤ��Ƶ������ܵõ���
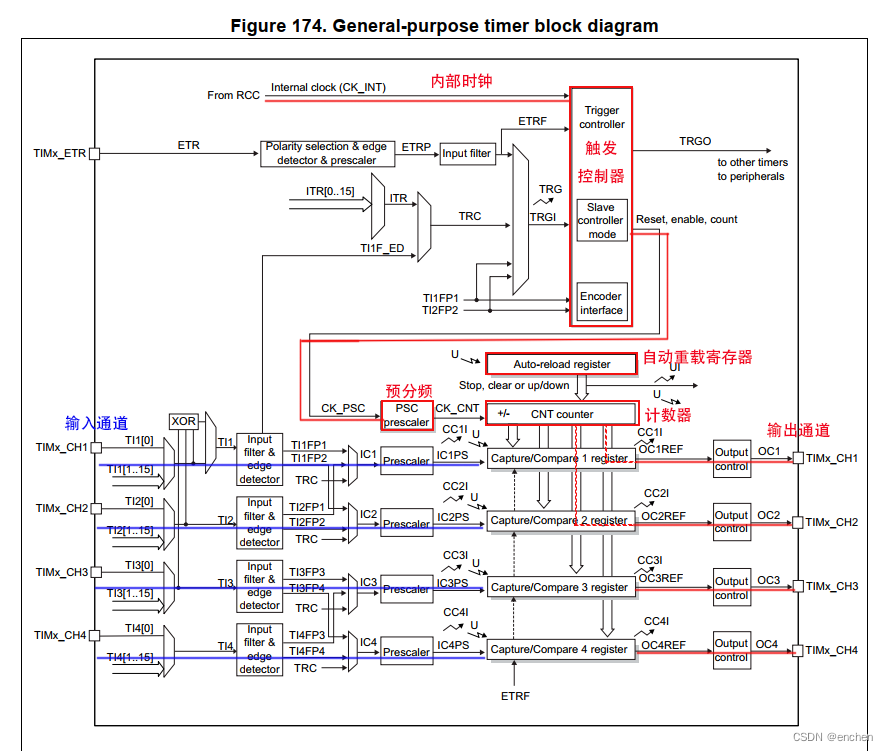
????????�������ͨ�ö�ʱ����ͼ,����ʱ��Դ��ͽ�����PSCԤ��Ƶ��,����CK_CNT,CK_CNT�������������������� PSC ��16 λ��Ԥ��Ƶ��,���ԶԶ�ʱ��ʱ�ӽ��� 1~65536 ֮����κ�һ�������з�Ƶ,������㷽ʽΪ:CK_CNT=48Mhz/(PSC+1)
????????��֮��ͽ��������CNT,CNTҲ��16λ�ļ�����,������ֵΪ65535,������ֵ�ﵽ�Զ���װ�ؼĴ�����ʱ��Ͳ��������¼�,�����½��м�������Ȼ�Զ���װ�ؼĴ�����ֵҲ���������õ�,�Զ���װ�ؼĴ���ARRҲ��һ��16λ�ļĴ���,������ֵ�ﵽ���ֵ��ʱ��,�ͻ���������¼�,�����ж��¼�,��������������¼�,���߸�λ���������¼����������ն�ʱʱ��Ϊ:(PSC+1)x(ARR+1)/ 48000000 ��
������
????????������ʱ������������Ҫ�漰�������Ĵ�������,�ֱ��Ǽ������Ĵ���(TIMx_CNT)��Ԥ��Ƶ���Ĵ���(TIMx_PSC)���Զ����ؼĴ���(TIMx_ARR),�������Ĵ������� 16 λ��Ч����,��������ֵΪ 0�� 65535��
��ʱ����������
????????�ȿ�һ��STM32WL�еĶ�ʱ����ʼ�������ݽṹ,����:
/**
* @brief TIM Time base Configuration Structure definition
*/
typedef struct
{
uint32_t Prescaler; // Ԥ��Ƶ��
uint32_t CounterMode; // ����ģʽ
uint32_t Period; // ��ʱ������
uint32_t ClockDivision; // ʱ�ӷ�Ƶ
uint32_t RepetitionCounter; // �ظ�������
uint32_t AutoReloadPreload; // Ԥװ��
} TIM_Base_InitTypeDef;
���濴һ�¶�ʱ�������е��⼸����Ҫ����:
Prescaler Ԥ��Ƶϵ��
????????��ʱ��Ԥ��Ƶ������,ʱ��Դ����Ԥ��Ƶ�����Ƕ�ʱ��ʱ��,���趨TIMx_PSC �Ĵ�����ֵ�������÷�ΧΪ 0 �� 65535,ʵ�� 1�� 65536 ��Ƶ��ΪɶҪ��һ��Ԥ��Ƶ��,������Ϊϵͳʱ��Ƶ��̫����,����STM32WL��ʱ��Ƶ����48MHZ,��һ��Ķ�ʱ���ɶ���ס��ô����ٶ�,���Է�Ƶһ��,����Ƶ�ָ���ʱ����ʱ��Ƶ����һ��,���˶��ѡ�
��������������ź�Ƶ�� = ���뵽Ԥ��Ƶ�����ź�Ƶ�� / (Ԥ��Ƶϵ�� + 1)
��ֵΪ0�൱�ڶ������ź�1��Ƶ,Ҳ���Dz���Ƶ;��ֵΪ1�൱�ڶ������ź�2��Ƶ,��������;��STM32ϵ���и�ֵ����ȡֵ��ΧΪ0~65535;
CounterMode ����ģʽ
????????����ģʽ�����ľ��� Up(���ϼ���ģʽ),���ģʽ�¼�������ʼֵΪ0,����������� Period+1 ����һ������;������ѡֵ Down(��UP��һ��),Up/down(��һ��������UP���ڶ���������Down,��������);
Period ��������
????????��ʱ������,ʵ�ʾ����趨�Զ����ؼĴ�����ֵ���� Upģʽ Ϊ��,�ڴ�ģʽ�¼�������0��ʼ����,ÿһ���źż���ֵ+1, ������Period��֮�������ֵΪPeriod,������һ���źŽ������������һ������ ,���Դ�������жϻ�����������;���߾ٸ���ͨ������,�ٸ�����,��Ҫ��Ͱ�����ˮ,ˮ����֮�������������ˮ����Ҫ����ˮ��?�����趨һ��ֵ,��ˮ��100000�β���,��ȥ����������֮��,���������õ�10000��,�����ٵ�����
��STM32ϵ���и�ֵ����ȡֵ��ΧΪ0~65535;
AutoReloadPreload Ԥװ��
????????�������ټ���һ������֮����Զ����¼���,Ҳ����Ĭ�ϻ��������С����������й��������������Period,��ô���ݵ�ǰ״̬�IJ�ͬ�п��ܷ�������Ԥ�ϵĹ��̡����ʹ����AutoReloadPreload,��ô���Period���Ľ�������ɵ�ǰ�������ں�Ÿ���;
????????Timer��Ϊ��ʱʹ��ʱ�ź���Դͨ��ʹ���ڲ�ʱ��,������ȷ��Timer��ʱ���ź�Ƶ�ʺ���ݴ��趨ʵ�ֶ�ʱijһʱ����������Ҫ�IJ�����,������Ҫ�漰Prescaler��Period����������Prescaler�Ƕ����붨ʱ����ʱ���źŽ��з�Ƶ,PeriodΪһ�������еļ���ֵ��
TIM_ClockDivision ʱ�ӷ�Ƶ
????????���ö�ʱ��ʱ�� CK_INT Ƶ���������˲�������ʱ��Ƶ�ʷ�Ƶ��,������ʱ��û�д˹���,�������á�
TIM_RepetitionCounter �ظ�������
????????�ظ�������,���ڸ����ƼĴ���ר�üĴ���λ,���������Էdz���������� PWM �ĸ��������ﲻ������.
��ʱ�����ڼ���
????????��ʱ�¼�����ʱ����Ҫ�� TIMx_PSC �� TIMx_ARR�����Ĵ���ֵ����,���Ҳ���Ƕ�ʱ�������ڡ�����������Ҫһ�� 1s���ڵĶ�ʱ��,�����������Ĵ���ֵ���������?
????????����,���������� TIMx_ARR�Ĵ���ֵΪ 9999,���� TIMx_CNT�� 0��ʼ����,�պõ��� 9999ʱ�����¼�,�ܹ����� 10000��,��ô�����ʱʱ��Դ����Ϊ 100us���ɵõ��պ� 1s�Ķ�ʱ���ڡ�
????????����������������� TIMx_PSC�Ĵ���ֵʹ�� CK_CNT ���Ϊ 100us ����(10000Hz)��ʱ�ӡ�Ԥ��Ƶ��������ʱ�� CK_PSCΪ 90MHz,��������Ԥ��Ƶ��ֵΪ(9000-1)�������㡣
????????�������������Timerÿ����һ�ε�ʱ��Ϊ 1�� �� (ʱ��Ƶ�� �� (Prescaler + 1)) ,��ʱ��������һ�����ڵ�ʱ��Ϊ ����һ��ʱ�� �� (Period + 1) �� �����Զ�ʱʱ����㹫ʽ����: ?��ʱʱ�� = (Prescaler + 1) �� (Period + 1) �� ʱ��Ƶ�� ��λ:��
????????STM32��Ƭ�����кܶ��Timer,ͨ��TIM6��TIM7��Ϊ������ʱ����TIM1��TIM8��Ϊ����ʱ��������ı���Ϊͨ�ö�ʱ����������ʱ��������ֻ�ж�ʱ����;ͨ�ö�ʱ���ڶ�ʱ�����ϻ�֧���ⲿ���벶�Ƚϡ�PWM����ȹ���;����ʱ����ͨ�ö�ʱ���Ļ�����ֻҪ���������ڵ�����Ƶȹ��ܡ�
????????STM32WL��1������ʱ��TIM1,3��ͨ�ö�ʱ��TIM2/TIM16/TIM17���������Ķ�ʱ��LPTIM1/LPTIM2/LPTIM3.
��ʱ�����õ�һ�㲽��
����ͨ�ö�ʱ��,��������Ӧ�ж�,��Ҫ��Ϊ���¼�������(��TIM2Ϊ��)
- TIM2ʱ��ʹ��
- ����TIM2_ARR��TIM2_PSC��ֵ
- ����TIM2_DIER���������ж�
- ����TIM2����
- TIM2�жϷ�������
- ��д�жϷ�����
��ʱ��Ӧ��֮һ? ? ��ʱ������
��������
????????������ʵ������TIM2��ʱ������������һ��ʱ�����ж�,����������ָʾ��
��ʱ�����÷���
?????? ���ȸ���ʱ����Ƶ���ڴ�ʾ����,ϵͳ��ʱ����48MHz, TIM2����ʱ��(TIM2CLK)����ΪAPB1ʱ��(PCLK1),����APB1Ԥ��Ƶ������1��
TIM2CLK=PCLK1
PCLK1=HCLK
=>TIM2CLK=HCLK=SystemCoreClock
�����TIM2�ļ�����ʱ������Ϊ10KHZ,Ԥ��Ƶ��Prescaler�ļ�������:
Ԥ��Ƶ��Prescaler =(TIM2CLK/TIM2������ʱ��)-1
Ԥ��Ƶ��Prescaler =(SystemCoreClock/10KHz)-1 = 48000000/10000 �C 1 = 4799
����STM32WLxx�豸,SystemCoreClock����Ϊ48MHz��
���,���ü�����������ֵ,����Ǹ�����Ҫ��ʱ�ʱ���йصġ�����10KHz����һ����10000��,��ʵ������Ҫһ��һ�ε�1Hz��������,��ôֻ�ܰ�TIM2ARR�Ĵ���ֵҲ���Ǽ�������Period����Ϊ10000-1,Ҳ����˵����������10000-1�κ��������жϡ�
�������� =TIM2������ʱ��/(����Period + 1)=1����,
����TIM2��ÿ1�����һ���ж�
��Ƹ�Ҫ
????????��������ֵ�ﵽ�Զ����¼��ؼĴ���ֵʱ,TIM���²����ж�, ��ʱ�����������PB5�����ӵ�LED1ָʾ��״̬���л��� �������������һ��������,����LED1������Ƶ����˸:0.5Hz��������ִ�������,PB3�����ӵ�LED3��ͨ��
ʵ�ִ���
1��ϵͳʱ������
���ȿ�һ��ϵͳ��ʱ������,ͨ��SystemClock_Config����ʵ��:
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure LSE Drive Capability
* ��LSE���ⲿ��������������һ������,����������쳣������������,��ʹ���ⲿʱ�����������
*/
//HAL_PWR_EnableBkUpAccess();
//__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);
/** Configure the main internal regulator output voltage
* �����ڲ���ѹ���������ѹ
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); // ���õ�ѹ���������ѹ����,������ֵԽС����Ƶ��Խ��
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_MSI; // ѡ��MSI��Ϊʱ��Դ
RCC_OscInitStruct.MSIState = RCC_MSI_ON; // ��
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT; // MSIУ����ֵ,ѡ��Ĭ��(�ɲ�д)
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_11; // ʱ��Ƶ��ѡ�� 48MHz
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; // ��ʹ��PLL���
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) // ѡ��ʱ��Դ,������ʱ��Ƶ��,���ȴ�ʱ��Դ�л��ɹ�
{
Error_Handler();
}
/** Configure the SYSCLKSource, HCLK, PCLK1 and PCLK2 clocks dividers
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK3|RCC_CLOCKTYPE_HCLK
|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1
|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_MSI; // ѡ��ϵͳʱ��ԴΪMSI
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // ����AHB����ʱ��HCLK�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // ����APB1����ʱ��PCLK1�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // ����APB2����ʱ��PCLK2�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.AHBCLK3Divider = RCC_SYSCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) // ����ϵͳʱ���Լ�ϵͳʱ��SYSCLK��AHB����ʱ��HCLK��APB1����ʱ��PCLK1��APB2����ʱ��PCLK2�ķ�ƵƵ��
{
Error_Handler();
}
}
2��ͨ�ö�ʱ��TIM2��ʼ��
�����Ƕ�ʱ��TIM2�ij�ʼ������,��MX_TIM2_Init������ʵ��:
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2; // ����TIM2��ʱ��
htim2.Init.Prescaler = PRESCALER_VALUE; // ����������ΪTIM2ʱ��Ƶ�ʳ�����Ԥ��Ƶֵ,����Ԥ���10Khz�ļ���Ƶ��,��ô�����Ӧ���� 4799
htim2.Init.CounterMode = TIM_COUNTERMODE_UP; // �������������ϼ����ļ���ģʽ
htim2.Init.Period = PERIOD_VALUE; // ��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ,��Ϊ��Ҫ1s�ļ���Ƶ��,���Ը���10KHz�����Ƶ��,�������ھ�Ҫ��9999
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // ����ʱ�ӷָ�:TDTS = Tck_tim
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; // �Զ���װ��ʹ���йرռĴ����Ļ���������,ʹ�Ĵ���������,������Ҫ�ı�Period��ֵʱ�����¸���������������Ч,�����õ����¸�
if (HAL_TIM_Base_Init(&htim2) != HAL_OK) // ����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIM2��ʱ�������λ
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; // TIM2��ʱ�������ڲ�ʱ��Դ
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK) // ����TIM2��ʱ��Դ
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK) // ���ö�ʱ���������ģʽ
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
��ʱ����MSP��ʼ������,���ʱ��HAL_TIM_Base_Init�����б����õ�:
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
{
if(htim_base->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM2_CLK_ENABLE(); // ʹ��TIM2��ʱ��
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 3, 0); // ����TIM2��ʱ���жϵ��������ȼ�Ϊ3,��Ӧ���ȼ�Ϊ0
HAL_NVIC_EnableIRQ(TIM2_IRQn); // ����TIM2��ʱ�����ж�
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
}
3����ʱ������жϴ���
��ʱ��TIM2������жϴ�������:
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2); // TIM2��ʱ���жϴ���
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
ע��, HAL_TIM_IRQHandler �����л���� HAL_TIM_PeriodElapsedCallback ����,����ص�������ʵ������Ҫ���¶����,�����жϷ���������Ʋ����������С�
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) // TIM2��ʱ���жϴ�����Ļص�����
{
BSP_LED_Toggle(LED_BLUE); // TIM2��ʱ���жϵ�����ִ�����Ʋ���
}
��ϵͳ�����û������г��ִ���ʱ,�����Error_Handler����,�ĸú���,������ƵĴ������ӽ�ȥ:
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
BSP_LED_On(LED_RED); // ϵͳ�����г��ִ��������
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
4��������
�������һ����������ʵ��:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
/* ϵͳʱ�ӳ�ʼ�� */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* ͨ�ö�ʱ��TIM2��ʼ�� */
MX_TIM2_Init();
/* ��ʼ��LED�� */
BSP_LED_Init(LED_BLUE); // ����ʱ����������жϷ���ʱ������
BSP_LED_Init(LED_RED); // ��ϵͳ����ʱָʾ��
/* USER CODE BEGIN 2 */
/*## ���ж�ģʽ������ʱ�� ####################*/
/* Start Channel1 */
if (HAL_TIM_Base_Start_IT(&htim2) != HAL_OK)
{
/* Starting Error */
Error_Handler();
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
����,����˶�ʱ���������ܵ���Ҫ����,�������̴�����Դ���ĩ������ַ���ء�
������֤
�����������ص�LM401-Pro-Kit��������,���Կ���������˸,����ͼ:

ͨ��ʾ�����鿴LED�ƵĶ˿�PB5�ĵ�ƽ���,����ͼ:
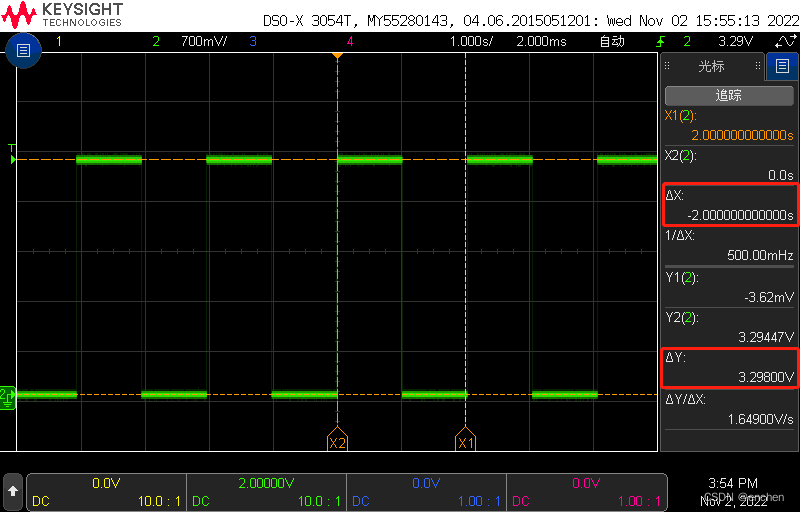
����ͼ�еIJ��������֪һ��������2��,�ߵ͵�ƽ������1��,��ʱ��ʱ���������Ԥ�ڡ�
��ʱ��Ӧ�ö�? ?��ʱ��PWM���
����֪ʶ:PWM����
1. PWM����
??????? PWM,Ӣ����Pulse Width Modulation,��������ȵ�����д,����ͨ����һϵ������Ŀ��Ƚ��е���,��Ч������Ҫ�IJ���(������״�Լ���ֵ),��ģ���źŵ�ƽ�������ֱ���,Ҳ����˵ͨ������ռ�ձȵı仯�������źš������ȵı仯��ռ�ձȾ���ָ��һ��������,�źŴ��ڸߵ�ƽ��ʱ��ռ�������ź����ڵİٷֱ�,���緽����ռ�ձȾ���50%��PWM�Ĺ����кܶ���,������ƺ����ơ�����ֱ��������߶��������ԭ���ȵ�,�ǵ�Ƭ����һ��ʮ����Ҫ�Ĺ��ܡ�

????????��һ��PWM��,����Ϊ10ms,�ߵ�ƽ��ʱ��Ϊ4ms,����ռ�ձ�Ϊ40%,ͬ���ڶ���PWM��Ϊ60%,������Ϊ80%��
????????PWM��Ƶ��:PWM��Ƶ�ʵ��������ڵĵ���,����˵��ͼPWM������Ϊ1/0.01,Ҳ����100HZ���ı�PWM��Ƶ����ͨ���ı�����������ʵ�ֵġ�����ͨ���ı�ߵ͵�ƽ�ܹ���ʱ�䡢�ı�ߵ�ƽռ�����ڵı����Ϳ���ʵ������Ƶ�ʡ�����ռ�ձȵ�PWM����
????????PWM����;���ŵ�:�������ڱ�����ƺ����ơ�������١����ʵ��ơ�PID���ڡ�ͨ�ŵȵ�,���ü�����������ǿ,�Ӵ�����������ϵͳ�źŶ���������ʽ��,���������ģת�����������źű���Ϊ������ʽ�ɽ�����Ӱ�콵����С,����ֻ����ǿ�����Խ���1�ı�Ϊ��0����0�ı�Ϊ��1ʱ,Ҳ���ܶ������źŲ���Ӱ��,����PWM����ͨ�ŵ���Ҫԭ��
2��STM32�ĹܽŸ���
????????STM32û��ר�ŵ�PWM����,����ʹ��IO�ڵĸ���ģʽ��������Ҫʹ��STM32WL��TIM1����ʱ������PWM�����,��ô����Datasheet�����ֲ��е�Alternatefunction mapping��ͼ�в���TIM1��ͨ���ֱ��õ�GPIOΪPA8��PA9��PA10��PA11,����ͼ:

?????? 3��STM32���PWMԭ��
????? PWM������ȵ���ģʽ��������һ���ź�,���ź�Ƶ����TIMx_ARR �Ĵ���ֵ����,��ռ�ձ�����TIMx_CCRx �Ĵ���ֵ������

????????����ͼ���Կ���,��CCR�Ĵ�����CNT��������ֵһ��ʱ,���������(�ı�ͨ����Ӧ��GPIO�����ƽ)������CNT���ʱ,����ֵ��TIMx_ARR�Ĵ���ֵ�����ġ�����˵TIMx_ARR�Ĵ���ֵ��������,��TIMx_CCRx�Ĵ���ֵ����CNT���ʱ,������û��������(�ı�ͨ����Ӧ��GPIO�����ƽ),Ҳ���Ǿ�����ռ�ձȡ�
????????��ô��STM32��Ƭ����,����ʹ�ö�ʱ��������ȽϹ���������PWM��,Ҳ����˵PWMģʽ���Բ���һ����TIMx_ARR�Ĵ���ȷ��Ƶ�ʡ���TIMx_CCRx�Ĵ���ȷ��ռ�ձȵ��źš������ϼ���Ϊ��,����ֵΪARR,�Ƚ�ֵΪCRRx,�����ͼ����ͼ��ʾ:
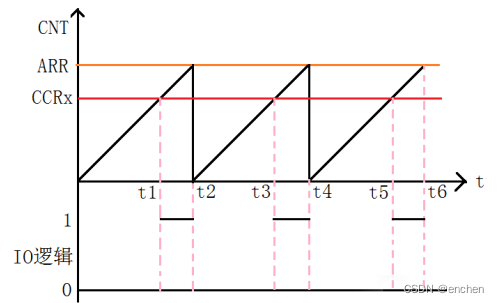
????????����ͼ,��������ʱ�����,��������CNT����ֵ,CNT����ֵ����ʱ����ƽ���Ͼ�����0��ARR,���㸴λ�ٵ�ARR����һ���̡���֮�л���һ����ֵ��CCRx���Ƚ�ֵ,ͨ���Ƚ�ֵ��������ÿ���ʹ֮����ߵ͵�ƽ��,�����Ͳ�����PWM���Ρ�
????????����,��0-t1��,��ʱ��������TIMx_CNTֵС��CCRxֵ,����͵�ƽ��t1-t2��,��ʱ��������TIMx_CNTֵ����CCRxֵ,����ߵ�ƽ����TIMx_CNTֵ�ﵽARRʱ,��ʱ�����,�������ϼ���...ѭ���˹�������һ��PWM������ɡ�
????????��ͼ���������˵����,�ź�Ƶ����TIMx_ARR �Ĵ���ֵ������ռ�ձ�����TIMx_CCRx �Ĵ���ֵ������ͨ������ARR��ֵ���Ե���PWM������,����CCRx��ֵ��С���Ե���PWMռ�ձȡ�
?????? ������ͨ��1Ϊ��,��ϸ����PWM�Ĺ�������,����ͼ��ʾ:

????????������߽������ʱ��Դ,���ڲ�ʱ��(CNT)�����ⲿ����ʱ��(ETRF)����,��������ģʽ������,ͨ��OCMR1�Ĵ�����OC1M[2:0]λ������PWMģʽ,֮�����һ��ѡ����,��CCER�Ĵ�����CC1Pλ�������������,�����CCER�Ĵ�����CC1Eλ��ʹ�����,Ȼ��ͨ��OC1�����PWM����
????????CCR1: ����Ƚ�(ֵ)�Ĵ���(����CCR2��CCR3��CCR4): �üĴ����������ñȽ�ֵ��
????????CCMR1: ����Ƚ�ģʽ�Ĵ���,���е�OC1M[2:0]λ,����PWM��ʽ��,��������PWMģʽ1����PWMģʽ2,������ģʽ��������Լ�����Ϊ:PWMģʽ1�������,��ǰֵС�ڱȽ�ֵΪ��Ч��ƽ;PWMģʽ2�������,��ǰֵ���ڱȽ�ֵΪ��Ч��ƽ��
????????CCxS[1:0]λ���ڶ���ͨ���ķ���
????????CCER: ����Ƚ�ʹ�ܼĴ��������е�CC1Pλ������������/����1������ԡ�0:�ߵ�ƽ��Ч,1:�͵�ƽ��Ч��
????????CCER: ����Ƚ�ʹ�ܼĴ��������е�CC1Eλ��������/����1���ʹ�ܡ�0:�ر�,1:��
PWM���Ӧ�õ����
?????? ��������
????????�������趨ʱ��TIM1,���PWM����
?????? ��ʱ�����÷���
?????? ����,Ϊ��ʱ��TIM1��Ƶ������STM32WLxx�豸,SystemCoreClock����Ϊ48MHz���ڱ�����,TIM1����ʱ��(TIM1CLK)����ΪAPB1ʱ��(PCLK1), ����APB1Ԥ��Ƶ������1��
TIM1CLK=PCLK1
PCLK1=HCLK
=>TIM1CLK=HCLK=SystemCoreClock
????????��������������ҪΪTIM1�������ֵ�1MHz��ʱ��Ƶ��,��ôΪ�˻����1MHz��TIM1������ʱ��,Ԥ��Ƶ��Prescaler�ļ�������:
Ԥ��Ƶ��Prescaler =(TIM1CLK/TIM1������ʱ��)-1
Ԥ��Ƶ��Prescaler =((SystemCoreClock)/1MHz)-1
?????? ���,���ü�����������ֵ������������������Ҫ25KHz�ĸ�������,����˵���ʱ��,����ʱ��TIM1�ֵõ�Ƶ����1MHz,Ҳ����1����1000000��,��ôΪ�˵õ�25KHZ��TIM1���ʱ��,��ô����Ҫ 1000000/25000=40, Ҳ����˵�������ۼƵ�40��Ҫ����һ�����,��������period( ARR)��ֵ��������:
ARR=(TIM1������ʱ��/TIM1���ʱ��)-1 = 39
?????? ��Ƹ�Ҫ
?????? ����������Ҫ��ﵽ���µ�ռ�ձ�:
????????????????TIM1_1ռ�ձ�=(TIM1_CCR1/TIM1_ARR+1)*100=50%
????????????????TIM1_2ռ�ձ�=(TIM1_CCR2/TIM1_ARR+1)*100=37.5%
????????????????TIM1_3ռ�ձ�=(TIM1_CCR3/TIM1_ARR+1)*100=25%
????????????????TIM1_4ռ�ձ�=(TIM1_CCR4/TIM1_ARR+1)*100=12.5%
?????? ע��:���Ҫʹ��HAL_Delay(),�����С��,�˺����ṩ��ȷ���ӳ�(�Ժ���Ϊ��λ)
????????������ϵͳISR�е����ı���. ����ζ������ӵ���HAL_Delay()һ����ΧISR����,��ôϵͳ�жϱ����и��ߵ����ȼ�(�����ϸ���)����Χ�жϡ� ���������ISR���̽���������Ҫ����ʱ�ӵ��ж����ȼ�,������ʹ��HAL_NVIC_SetPriority()������
?????? ʵ�ִ���
?????? 1��ϵͳʱ������
????????���ȿ�һ��ϵͳʱ�ӵ�����,�ں�����:
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
* �����ڲ���ѹ���������ѹ
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); // ���õ�ѹ���������ѹ����,������ֵԽС����Ƶ��Խ��
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_MSI; // ѡ��MSI��Ϊʱ��Դ
RCC_OscInitStruct.MSIState = RCC_MSI_ON; // ��
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT; // MSIУ����ֵ,ѡ��Ĭ��(�ɲ�д)
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_11; // ʱ��Ƶ��ѡ�� 48MHz
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; // ��ʹ��PLL���
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) // ѡ��ʱ��Դ,������ʱ��Ƶ��,���ȴ�ʱ��Դ�л��ɹ�
{
Error_Handler();
}
/** Configure the SYSCLKSource, HCLK, PCLK1 and PCLK2 clocks dividers
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK3|RCC_CLOCKTYPE_HCLK
|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1
|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_MSI; // ѡ��ϵͳʱ��ԴΪMSI
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // ����AHB����ʱ��HCLK�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // ����APB1����ʱ��PCLK1�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // ����APB2����ʱ��PCLK2�ķ�Ƶϵ��Ϊ1
RCC_ClkInitStruct.AHBCLK3Divider = RCC_SYSCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) // ����ϵͳʱ���Լ�ϵͳʱ��SYSCLK��AHB����ʱ��HCLK��APB1����ʱ��PCLK1��APB2����ʱ��PCLK2�ķ�ƵƵ��
{
Error_Handler();
}
}
?????? 2������ʱ��TIM1��ʼ��
?????? ����Ը���ʱ��TIM1���г�ʼ��,�ں���MX_TIM1_Init����ʵ��,����:
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1; // ����TIM1��ʱ��
htim1.Init.Prescaler = PRESCALER_VALUE; // ����������ΪTIM1ʱ��Ƶ�ʳ�����Ԥ��Ƶֵ,����Ԥ���1MHz�ļ���Ƶ��,��ô�����Ӧ���� 47
htim1.Init.CounterMode = TIM_COUNTERMODE_UP; // �������������ϼ����ļ���ģʽ
htim1.Init.Period = PERIOD_VALUE; // ��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ,��Ϊ��Ҫ25KHz�ļ���Ƶ��,�����ö�ʱ���ֵõ�1MHz����25KHz�ټ�һ,�������ھ�Ҫ��39
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // ����ʱ�ӷָ�/��Ƶ:TDTS = Tck_tim
htim1.Init.RepetitionCounter = 0; // �ظ�������,���ڸ����ƼĴ���ר�üĴ���λ,���������Էdz���������� PWM �ĸ�������ֵ����0��ʾ���ظ�����,�������ﵽPeriod��ֵ��������¿�ʼ,��ֵ����1��ﵽPeriod�����жϻ��ƽ��ת��������¶���,�������ظ�����һ�βŶ���,ͬ��ֵΪ2���ظ�����
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; // �Զ���װ��ʹ���йرռĴ����Ļ���������,ʹ�Ĵ���������,������Ҫ�ı�Period��ֵʱ�����¸���������������Ч,�����õ����¸�,���PWM���ʺ�
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK) // PWM��ʼ��
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1; // PWMģʽ����PWM1, ��ģʽ��,��������ϼ���,��ô����ʱ��ֵCNTС�ڱȽ����趨��ֵCCRʱ��TIMx����Ŵ�ʱ����ĵ�ƽΪ��Ч��ƽ,���OCPolarity����Ϊ���Կɵó��������CNT<CRRxΪ��Ч��ƽ,��ƽֵ�Ǹߵ�ƽ,��֮������ֵCNT>CRRxΪ��Ч��ƽ,��ƽֵ�ǵ͵�ƽ��
sConfigOC.Pulse = PULSE1_VALUE; // ����ֵ,�����о��Ǹߵ�ƽ�����Ķ�ʱ��ʱ��������������PWMռ�ձ�ֻ������������Period������ֵPulse�йء�����Peirod=1000,Pluse=200�ͱ�ʾһ������1000����ʱ��ʱ������,��Ч�ߵ�ƽռ200��,ռ�ձ�20%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; // �������,˵������ƽλ��Чʱ�Ǹߵ�ƽ����֮,������õ��ǵͼ���,��ô����ƽλ��Чʱ���ǵ͵�ƽ�������������ϼ�����ʽ��PWM1ģʽ���ÿ�֪,���������OCx����Ϊ����,��Ϊ���ϼ����϶��Ǵ�0��ʼ��,��ʼʱCNT��ȻС��CCR,��ƽ��Ч,�������øߵ�ƽ��Ч��PWM���ο�ʼʱ���Ǹߵ�ƽ
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; // OCxN�������,���������ʱ��,�������෴
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) // PWM��ͨ��1����(ͨ��1������ֵ��PULSE1_VALUE,����ռ�ձ�)
{
Error_Handler();
}
sConfigOC.Pulse = PULSE2_VALUE; // ͨ��2������ֵ,��������ͨ��2��ռ�ձ�
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK) // PWM��ͨ��2����
{
Error_Handler();
}
sConfigOC.Pulse = PULSE3_VALUE; // ͨ��3������ֵ,��������ͨ��3��ռ�ձ�
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK) // PWM��ͨ��3����
{
Error_Handler();
}
sConfigOC.Pulse = PULSE4_VALUE; // ͨ��4������ֵ,��������ͨ��4��ռ�ձ�
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK) // PWM��ͨ��4����
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.BreakAFMode = TIM_BREAK_AFMODE_INPUT;
sBreakDeadTimeConfig.Break2State = TIM_BREAK2_DISABLE;
sBreakDeadTimeConfig.Break2Polarity = TIM_BREAK2POLARITY_HIGH;
sBreakDeadTimeConfig.Break2Filter = 0;
sBreakDeadTimeConfig.Break2AFMode = TIM_BREAK_AFMODE_INPUT;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1); // �ú��������ĸ�ͨ����GPIO���ŵ�����
}
????????�������MX_TIM1_Init�����е�HAL_TIM_PWM_Init��������õ�HAL_TIM_PWM_MspInit����,���������һ���ض��庯��,��Ҫ�ǿ���TIM1��ʱ��,����:
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspInit 0 */
/* USER CODE END TIM1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM1_CLK_ENABLE(); // ��������TIM1��ʱ��
/* USER CODE BEGIN TIM1_MspInit 1 */
/* USER CODE END TIM1_MspInit 1 */
}
}
????������MX_TIM1_Init������Ҳ����õ�HAL_TIM_MspPostInit����,���HAL_TIM_MspPostInit������Ҫ�Ƕ�˼·PWM��������Ž��г�ʼ������,����:
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIM1)
{
/* USER CODE BEGIN TIM1_MspPostInit 0 */
/* USER CODE END TIM1_MspPostInit 0 */
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM1 GPIO Configuration
PA11 ------> TIM1_CH4
PA10 ------> TIM1_CH3
PA9 ------> TIM1_CH2
PA8 ------> TIM1_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_10|GPIO_PIN_9|GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1; // TIM1����
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM1_MspPostInit 1 */
/* USER CODE END TIM1_MspPostInit 1 */
}
}
3��������
���,������̵�����������:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
/* ϵͳʱ�ӳ�ʼ�� */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* GPIO��ʼ�� */
MX_GPIO_Init();
/* ����ʱ��TIM1��ʼ�� */
MX_TIM1_Init();
/* ��ʼ��LED�� */
BSP_LED_Init(LED_RED); // ��ϵͳ����ʱָʾ��
/* USER CODE BEGIN 2 */
/*## ��ʼ����PWM���� ####################*/
/* Start Channel1 */
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1) != HAL_OK) // ������ʱ��TIM1��ͨ��1��PWM�ź����
{
/* PWM Generation Error */
Error_Handler();
}
/* Start channel 2 */
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2) != HAL_OK)
{
/* PWM Generation Error */
Error_Handler();
}
/* Start channel 3 */
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3) != HAL_OK)
{
/* PWM generation Error */
Error_Handler();
}
/* Start channel 4 */
if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4) != HAL_OK)
{
/* PWM generation Error */
Error_Handler();
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
������֤
?????? �������ص�LM401-Pro-Kit����������֮��,��ʾ�����ӵ��������ϵ�PA9�ӿ�,�鿴һ��ͨ��2�����PWM����,����:
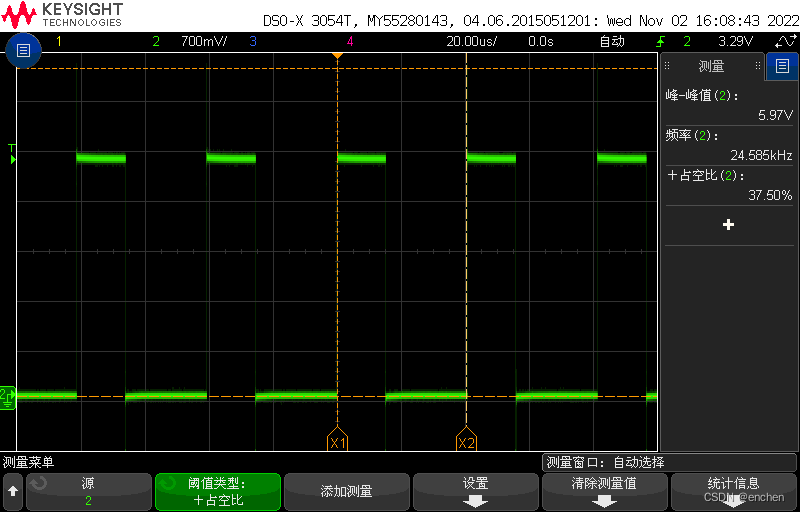
?????? ����ͼ���Կ���ռ�ձ�37.5%,���������Ԥ�ڵġ�
���̴������ص�ַ
��ʱ��Ӧ��һ֮������ʱ�����̴���:
����: https://pan.baidu.com/s/1KSIIRc9aqOUcTrNYCAtzRQ
��ȡ��: ruij
��ʱ��Ӧ�ö�֮��ʱ��PWM������̴���:
����: https://pan.baidu.com/s/1bWnNWza6-2Kf0XXcRG44eg
��ȡ��: 7972