����Ŀ¼
����
����һö���������Ա,��һ��C���Ի���,Ŀǰ��ѧSTM32��Ƭ��,д�´�ƪһ������ѧ������������
���չ���,�Ƚ���������ʵս����,����ϰ��,�������ҵ�����
SG90����һ�ֶ��,���ʺ�С������,��ֱ���ɵ�Ƭ������������,��Ƭ���и����Ƿ�װ�˺ܶණ��,������Щ�ط�,����ֻҪ��ס�ͺ�,������ĵط�,��ҪѰ������,���Ĭ�ϵ�Ƭ���ײ����ʵ����ij��ܾͺ�,����������ʵ�ֻ���ϸ��ԭ����
��ƪ���۽��ĺ�dz��,��Ϊ���ô����������
һ����������
1.1 �������ԭ���CPWM
���һ�������0-180�Ȼ�0-360��ת������Ƕ�,��������С��С��ת����ƺͻ�е�۵Ĺؽڵȡ������ת���Ƕȷ�Χ���ǹ̶���,�빺��ʱ�����̼�,�������ĸ���Χ�ġ�ʵ��ʹ����,���ǶԶ����������������:
- ���ת��һ���Ƕȡ�
- ���ת��ʱ,������Ҫ����ת��һ���µĽǶȡ�
������θ����������ת���Ƕ���?����,Ҫ�ͳɱ�,�ź���Ҫ�١����,Ҫ��������ǶȺ���;��ϡ�������Ƴ���һ���ķ���:��һ��ʱ��Ϊ20ms���ź�ȥ���ƶ��,�źŵ�ǰһ��Ϊ�ߵ�ƽ,����ʱ��0.5ms��2.5ms,����ת���Ƕ�0-180����360��,����Ϊ�͵�ƽ,�����PWM�ź�,��������ͼ:
��������,PWM�ź�����ǰ��Ϊ�ߵ�ƽ����ʱ�������ת�Ƕ�,������ռ�ձȿ�������ת�Ƕȡ�
��תʱ,���ת����ָ���ĽǶ���Ҫһ����ʱ��,ת���ĽǶ�Խ��,��Ҫ��ʱ��Խ��,�����������Ҫ�ȴ�һ����ʱ�䡣�����ոո��������ָ��ת��180��,�������ַ���ָ��ת��90��,����ת��180����ת��90��,�����ڽ��ܵ��ź�ʱֱ���ڵ�ǰ�ĽǶ�ֱ��ת��90��ȥ��
ϰ��
ϰ��110. ���2.5msΪ90��,��ô36�ȵ�PWM�ź��Ǹߵ�ƽʱ�䳤����?
ϰ��111. Ϊʲô��PWM���ƶ��,��û�������ķ���?
ϰ��112. PWM�ź����ڴ��л��Dz���ͨ��?ȫ�����ǵ���?ΪʲôҪ��ô���?
ϰ��113. PWM�źų���Ϊ20ms,Ϊʲôһ��ֻ��ǰ2.5ms?
1.2 ��ʱ��
ΪʲôҪ���ⶨʱ��,�ܼ�,Ҫ����ȥ����PWM�źš�
1.2.1 ������ʱ��
��ʱ��,����˼��,���ն������ӵ���ij��ʱ����ij�����顣����,�㶨����������6�����ܲ�,����ÿ�����Сʱ��һ��ˮ����Ҳ���Ը���������һ������,ÿ����������ܷ������Ϩ��,����ÿ��4����������ٹ�4���Ϩ��
Ϊ�˴�ɡ�ÿ��4��������������ٹ�4�������Ϩ��,���ǹ���һ��ʱ��ϵͳ,��Ҳ�������,��Ƶ���Щ����,���ǻ�����ѹ������,����һ������������
- ���ǹ���һ��ʱ��װ��,ÿ��20ms,����һ��,Ҳ��������1���г�50��,ÿ�ݳ�20ms��(ΪʲôҪ����ôһ��ʱ����,������Ϊ��Ƭ����ʱ�Ӿ�������ʱ��,��1���г�n��)
- Ϊ���ܹ�ʵ�ּ��4��,��������һ��ѭ������װ��:ÿ��ʱ����1��,������ֵ��һ,������������,ֻ֪��0-1999,����1999���ټ�һ,��ֵ��Ϊ0��
- �����һ������װ��,������װ������Ϊ1999ʱ���ؾͷ�תһ��,��������Ϩ��
����������:
�������Ĺ�����,���Ǿ�����������һ����װ��,����ʱ������ʵ�����ʱ��Դ,ѭ������װ���ṩʵ����Ҫ��ѭ���̶����,�����������һ�������ļ�ª��ʱ��,�뵥Ƭ����������ʱ����������һ��,������ʽ�������ǡ�
ʱ��װ��
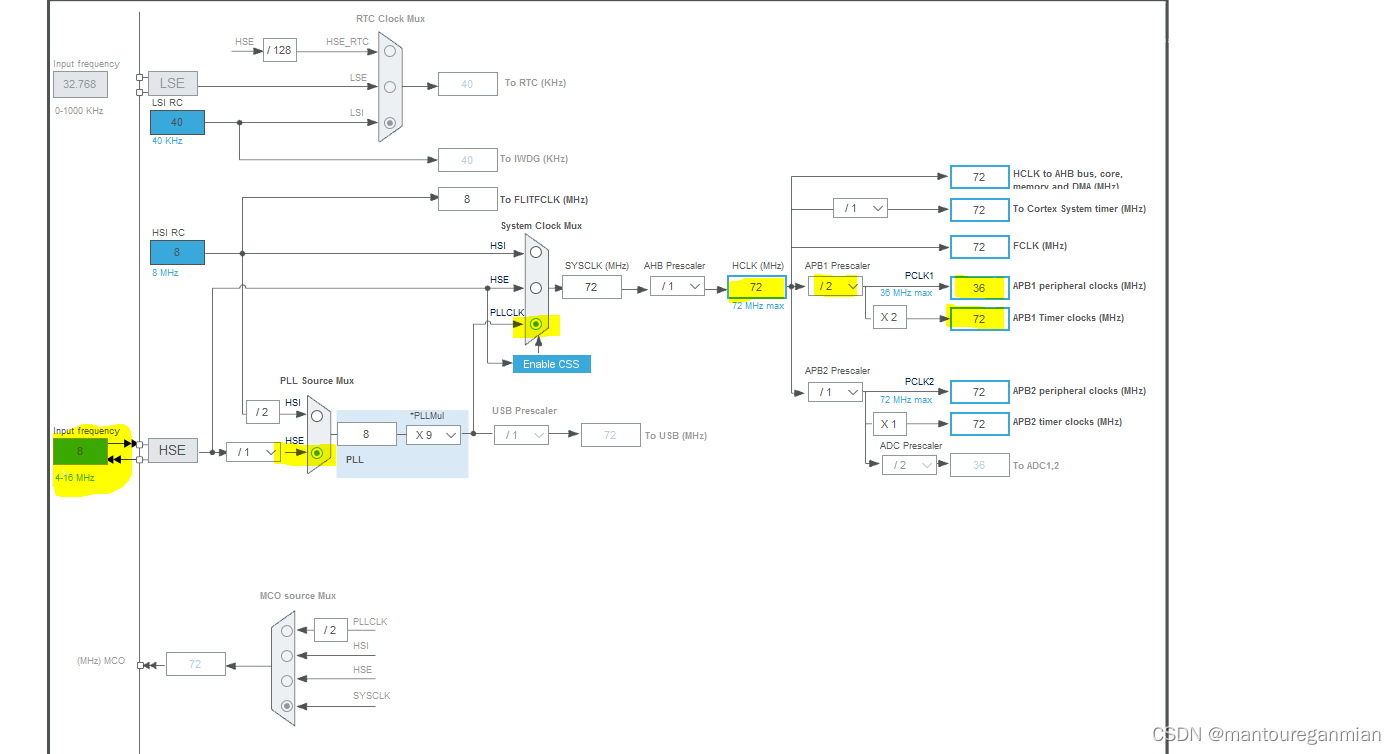
ʱ��װ��:һ����STM32��Ƭ����ϵͳʱ��,�ñ���sys_tck��ʾ,Ƶ��72MHz,����1���Ϊ720���,��Ȼ̫ϸ,Ƶ��̫����,��Ҫ����Ƶ��,��ԭ����Ƶ���з�Ϊԭ����n��֮һ,��
7200000
n
\frac{7200000}{n}
n7200000?,���������Ƶ���������720��Ƶ,����ԭ��72MƵ�ʳ���720,��0.1MHz,ÿ��0.01ms��STM32��Ƭ������������Ƶ��Ϊ65536,��Ϊuint16��������,�����Ƶ����ʵ��һ���Ĵ�����
ѭ��������
ѭ��������:��һЩ�Ĵ������ɡ�����Ҫ������:
- �����Ĵ���CK_CNT,���Դ洢һ��uint16����,ʱ��ǰ��һ��,����ֵ�Զ���һ���һ��
- �Զ���װ�ؼĴ���ARR,��CK_CNT����ARRʱ,CK_CNT���Զ��仯,����ѭ�������������������жϵĻ�,��CK_CNT>ARRʱ,�ᴥ��һ���жϡ�
ѭ��������������ģʽ:
| ģʽ�� | ���� | ͼ���ʾ |
|---|---|---|
| ���ϼ��� | �������Զ���һ,CK_CNT��0������ARR |  |
| ���¼��� | �������Զ���һ,CK_CNT��ARR��С��0 | 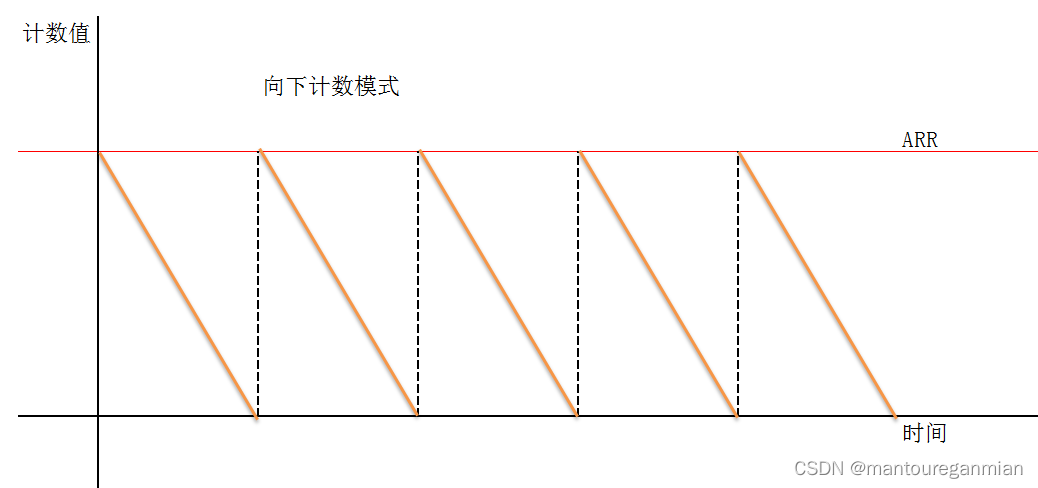 |
| ���Ķ��� | ���������Զ���һ,���Զ���һ,CK_CNT�ȴ�0�ӵ�ARRȻ���ټ���0 | 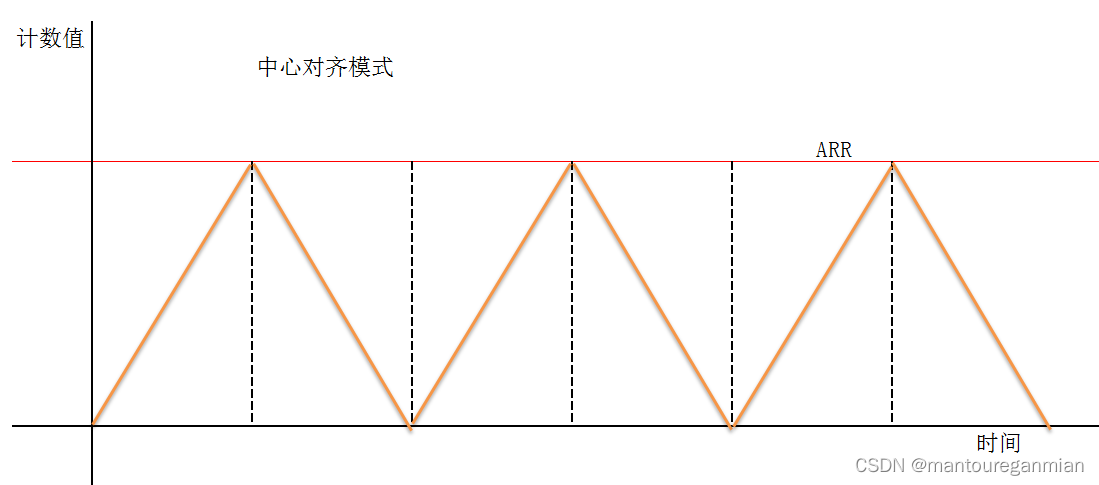 |
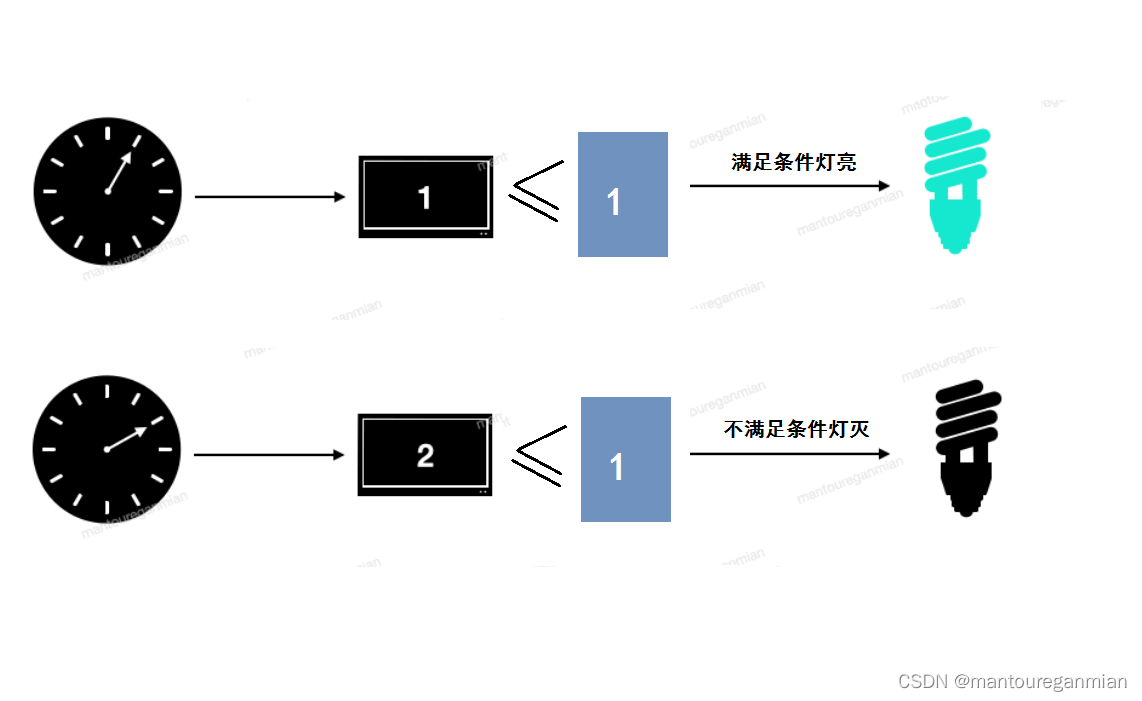
1.2.2 �Ƚ϶�ʱ��
ֻ�л���ʱ����������PWM�źŵ�,��Ϊ��ֻ���ṩѭ���̶����,���ܽ������Ϊǰ��κͺ���,��������PWM��Ϊ���������,��Ҫ��ѭ����������һ���Ƚ�����CCR,����������ֵ����ʱ,��CCR�Ƚ�,����������ȽϵĽ��,�Է���������������
�������������������,���Ǹijɵ�����һ�����������ģʽ������ֻ��Ҫ�������ᵽ������װ�����ټ�һ���Ƚ����־ͺ�:
CCR��STM32���ǽ����ȽϼĴ���,��ѭ���������ĵ�������Ҫ�ļĴ�������STM32����ʱ�����еĹ��ܡ�
ϰ��
ϰ��121. ��ʱ����ʱ��װ��,ѭ����������������ʲô����,��̸̸��������?
ϰ��122. ѭ������������Щ��Ҫ����Ҫ����?
ϰ��123. STM32ʱ��Ƶ��Ϊ72MHz,��Ƶ��Ϊuint16,CK_CNTΪuint16,�����ѭ��ʱ����Ϊ���ʱ��?��С��?
ϰ��124. ���Ҫ����һ����ת360�ȵ�PWM�ź�,������ʱ��װ�ú�ѭ���������ļĴ���ֵ?
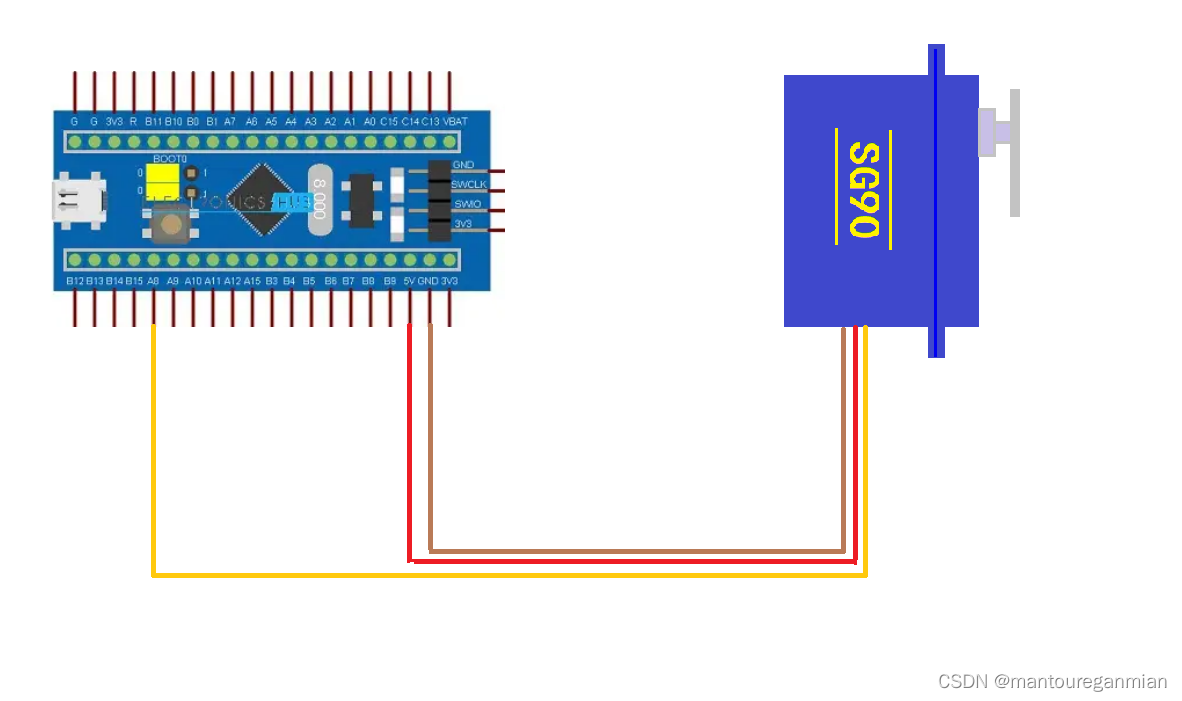
����ʵս����
STM32�Ѿ�Ϊ������Ӳ���Ϸ�װ�����������ᵽ��:ʱ��װ�á�ѭ���������Ͷ������װ��,�Լ����������Զ��Ƚϵȹ���,�����ֽ����������ϸ�ڡ�����ֻ��Ҫ����Щ��������������úͽ��߾ͺá�
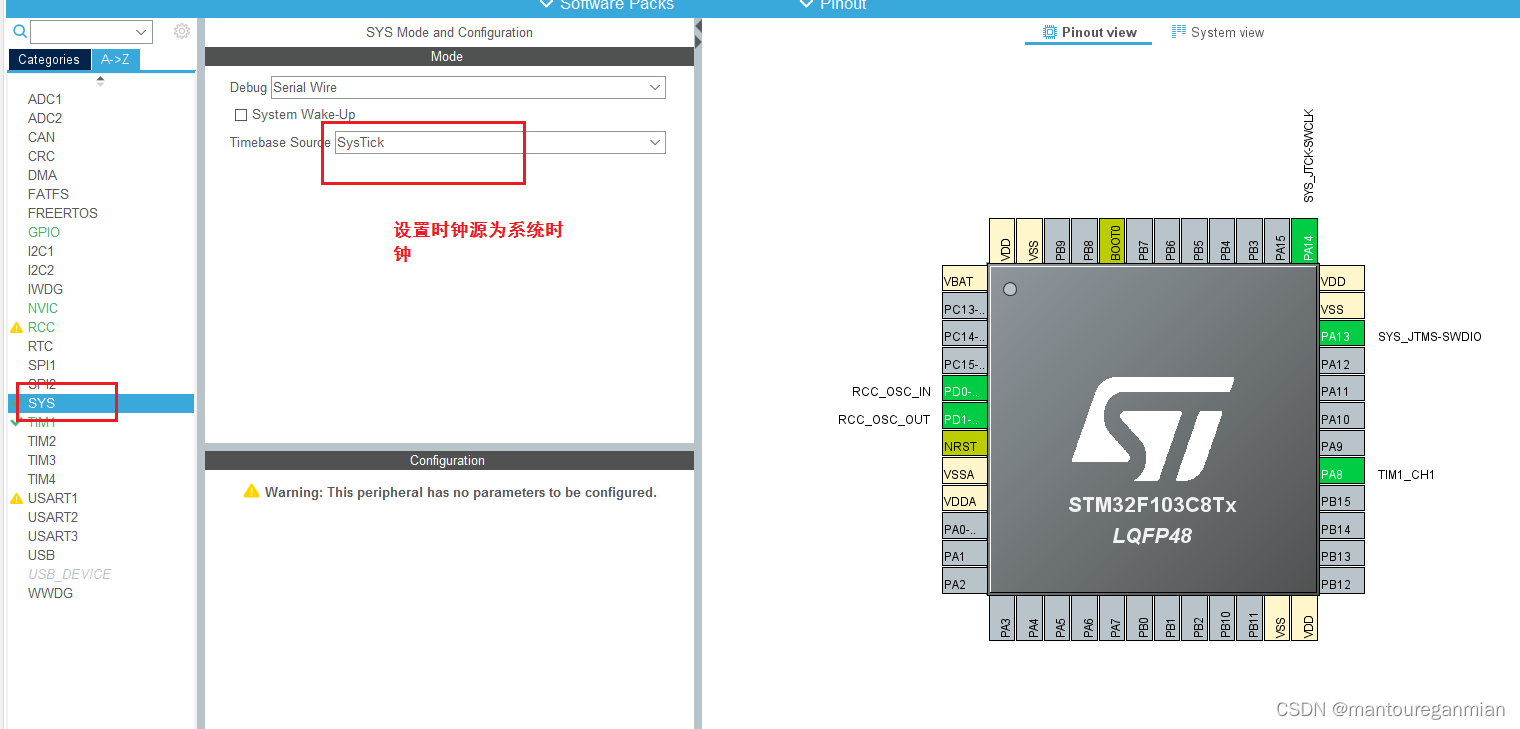
2.1 ���ö�ʱ���͵�Ƭ������

ϰ��
ϰ��211: ΪʲôCounter Period������Ϊ1999,������2000?
2.2 ����
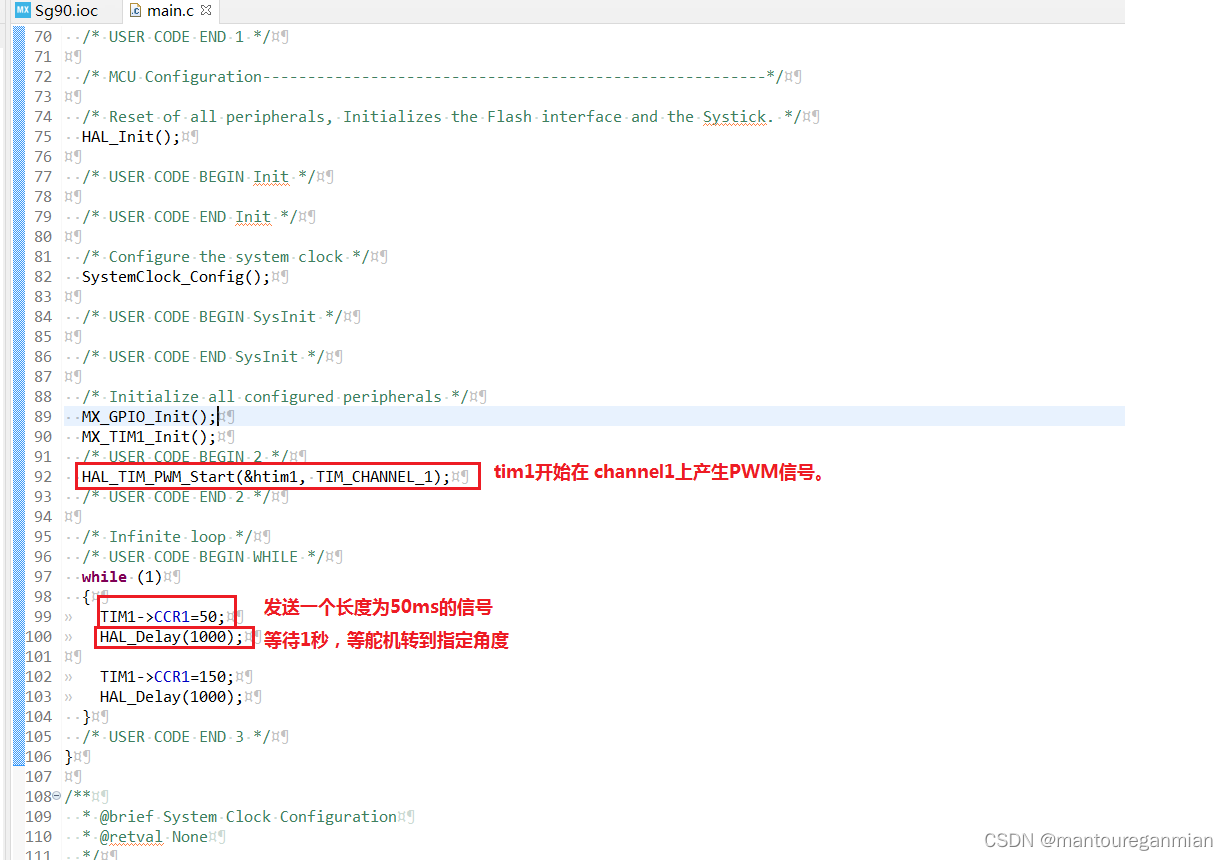
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
TIM1->CCR1=50;
HAL_Delay(1000);
TIM1->CCR1=150;
HAL_Delay(1000);
}
/* USER CODE END 3 */
}