����Ŀ¼
ժҪ
��ƪ������STM32CubeMX��STM32CubeIDE�������,����оƬΪSTM32F103C8T6����DHT11��ʪ�ȴ�����,����ʱ���д��ʪ�ȴ���������������,�������������¶Ⱥ�ʪ��ͨ�����ڷ��͵����ڵ�������������ʹ��������DHT11ģ��,���Ե�·�ṹ�Ƚϼ�ͨ�����Ŀ���ѧ��DHT11������ʪ�ȴ�������ԭ���Լ�ʱ��ṹ,���Ҹ�����ʱ���д��������
���ù���:
1��оƬ:STM32F103C8T6
2�������豸:DHT11��ʪ�ȴ�����
3����������:STM32CubeMX
4��IDE:STM32CubeIDE
֪ʶ����:
ͨ����ƪ��������ѧ��:
1��DHT11��ʪ�ȴ������Ĺ���ԭ��
2��DHT11��ʪ�ȴ���������������
3����ʱ����д�뼶��ʱ����
4�����붯̬�ı�GPIO�����������
һ�����
1.DHT11������ʪ�ȴ�����
DHT11������ʪ�ȴ�������һ��������У�����ź��������ʪ�ȸ��ϴ���������Ӧ��ר�õ�����ģ��ɼ���������ʪ�ȴ��м���,ȷ����Ʒ���м��ߵĿɿ�����Խ�ij����ȶ��ԡ�����������һ������ʽ��ʪԪ����һ��NTC����Ԫ��,����һ��������8λ��Ƭ�������ӡ���˸ò�Ʒ����Ʒ��Խ��������Ӧ������������ǿ���Լ۱ȼ��ߵ��ŵ㡣ÿ��DHT11���������ڼ�Ϊ��ȷ��ʪ��У�����н���У��Уϵ���Գ������ʽ������OTP�ڴ���,�������ڲ��ڼ���źŵĴ���������Ҫ������ЩУϵ���������ƴ��нӿ�,ʹϵͳ���ɱ�ü���ݡ���С����������͵Ĺ���,�źŴ������ɴ�20������,ʹ���Ϊ����Ӧ��������Ϊ���̵�Ӧ�ó��ϵ����ѡ��ƷΪ 4 �뵥�����ŷ�װ�����ӷ���,�����װ��ʽ�ɸ����û�������ṩ������ʹ�õ���DHT11ģ��,��ʵ��ͼ������ʾ:

2.DHT11���ܲ���
? ������ѹ��Χ:3.3V-5.5V
? �������� :ƽ�� 0.5mA
? ���:�����������ź�
? ������Χ:ʪ�� 20~90%RH,�¶� 0~50��
? ���� :ʪ�ȡ�5%,�¶ȡ�2��
? �ֱ��� :ʪ�� 1%,�¶� 1��
2.DHT11���ݽṹ
DHT11����ʪ�¶ȴ���������������������ʽ���������������Ŷ˿�����������˫�����������ݰ���5Byte(40Bit)��ɡ����ݷ�С�����ֺ���������,һ�����������ݴ���Ϊ40bit,��λ�ȳ���DHT11 �����ݸ�ʽΪ:8bit ʪ����������+8bit ʪ��С������+8bit �¶���������+8bit �¶�С������+8bit У���������У�������Ϊǰ�ĸ��ֽ���ӡ�
�����������������δ����Ķ��������ݡ�����(ʪ�ȡ��¶ȡ�������С��)֮��Ӧ�÷ֿ�����������,ij�δ� DHT11 ������������ͼ��ʾ:
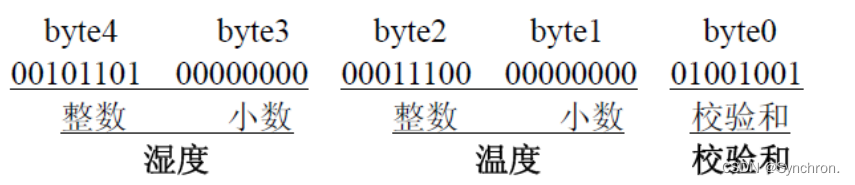
���������ݾͿɵõ�ʪ�Ⱥ��¶ȵ�ֵ,���㷽��:
??ʪ��=byte4.byte3=45.0 (%RH)
??�¶�=byte2.byte1=28.0 ( ��)
??У��=byte4+byte3+byte2+byte1=73(=ʪ��+�¶�)(У����ȷ)
���Կ���,DHT11�����ݸ�ʽ��ʮ�ּ�,DHT11��MCU��һ��ͨ�����Ϊ3ms����,��������������ȡʱ������ҪС��100ms��
2.DHT11����ʱ��
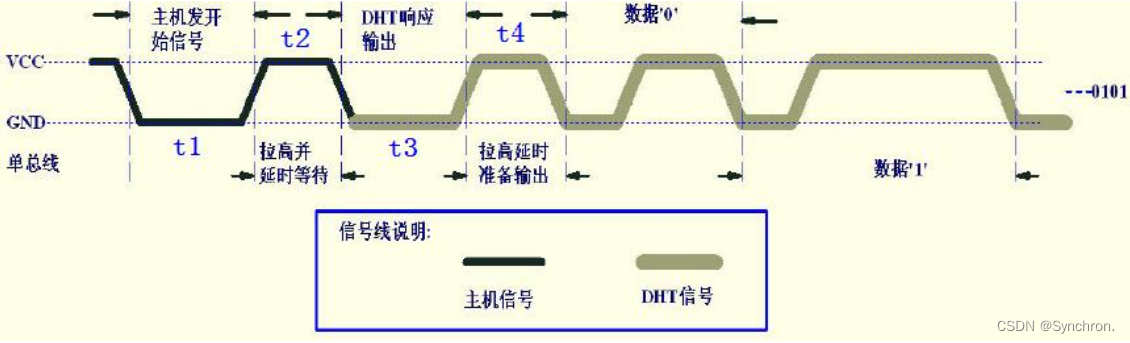
�����������Ϳ�ʼ�ź�,��:����������,����t1(���� 18ms)ʱ��,Ȼ������������t2(20-40us)ʱ��,Ȼ���ȡDHT11����Ӧ,�����Ļ�,DHT11������������,����t3(40-50us)ʱ��,��Ϊ��Ӧ�ź�,Ȼ��DHT11����������,����t4(40-50us)ʱ���,��ʼ������ݡ�DHT11 �����ݷ���������ͼ��ʾ:
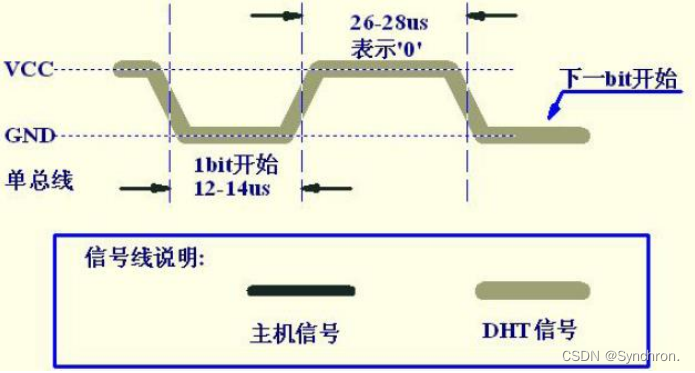
DHT11 ������֡�0����ʱ����ͼ��ʾ:
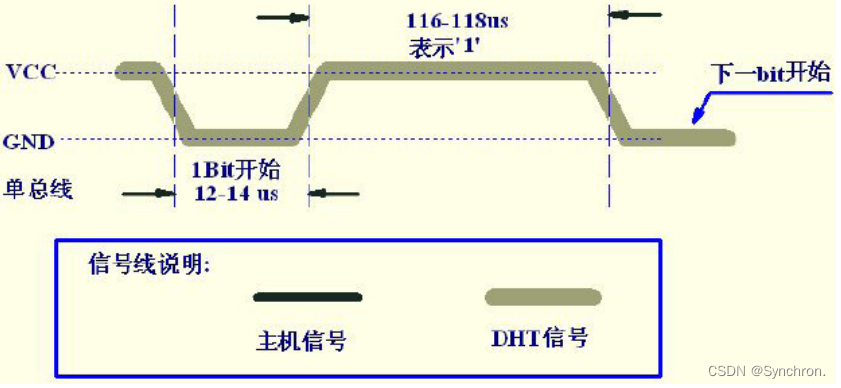
DHT11 ������֡�1����ʱ����ͼ��ʾ:
����Ӳ����·���
1.ģ���ڲ���·
�������Ѿ���װ�õ�ģ��,�����ⲿ���˽⼴�ɡ�ͼ����Ҫһ��4.7K����������R1,��ͨ��Դ��LED������
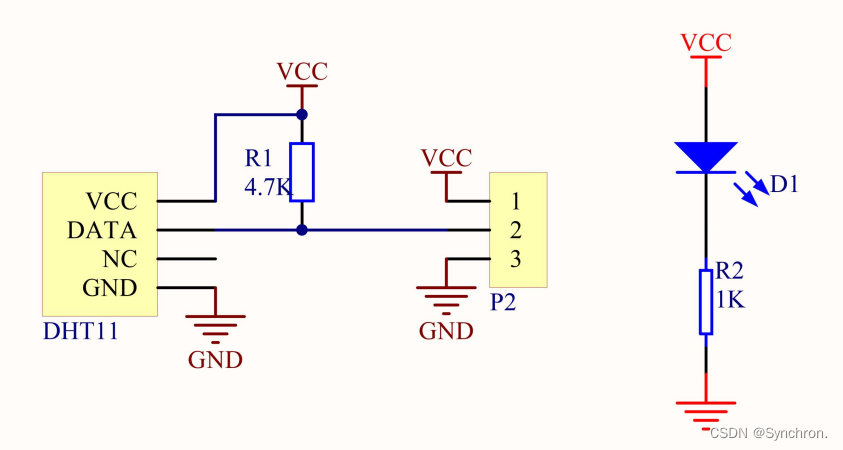
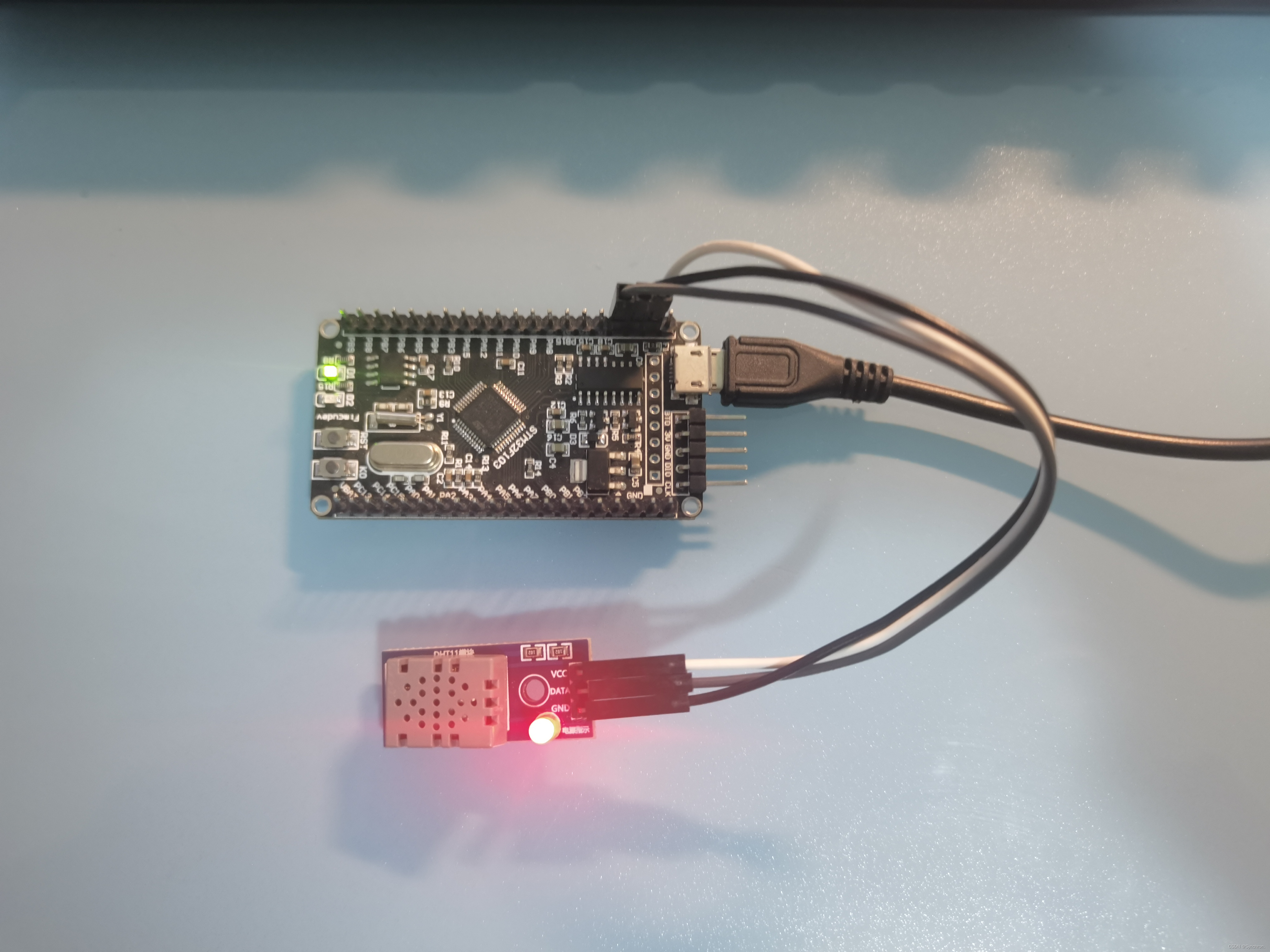
2.�뵥Ƭ�������ӵ�·
ģ���뵥Ƭ�������ĵ�·Ҳ�ܼ�,������Ƭ����PB12���Žӵ�ģ���OUT�˿�,ģ��VCC��3.3V,GND�뵥Ƭ��GND�������ɡ�

�����������
1.CubeMX����
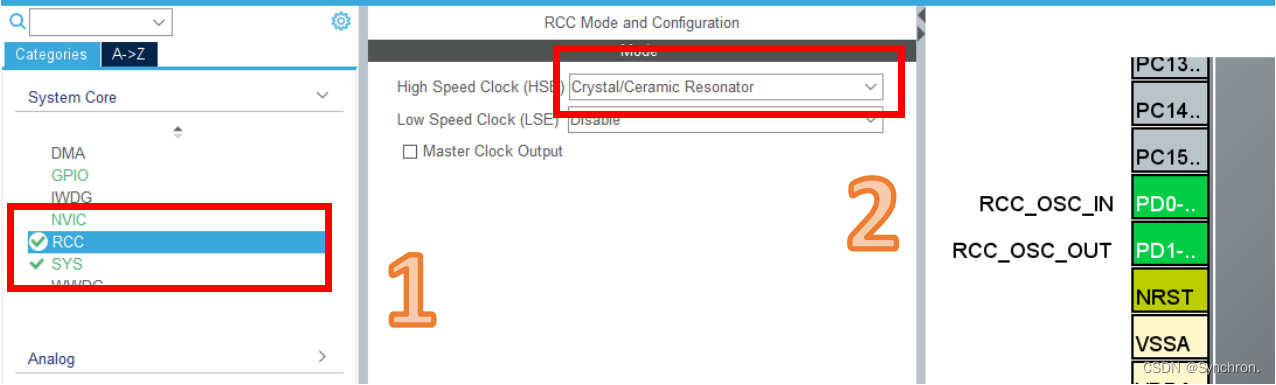
(1)ʱ������
����ͼ�ֱ�Ϊ����HSE(�����ⲿʱ��)�Լ�ʱ���������á�ѡ��HSE֮��оƬ���Զ�ѡ�������������������ⲿ����,����LSE֮������ʱ����,����HCLKΪ72MHz(���72MHz,Ҳ������������),������ͼ��ͼ��ʾ��

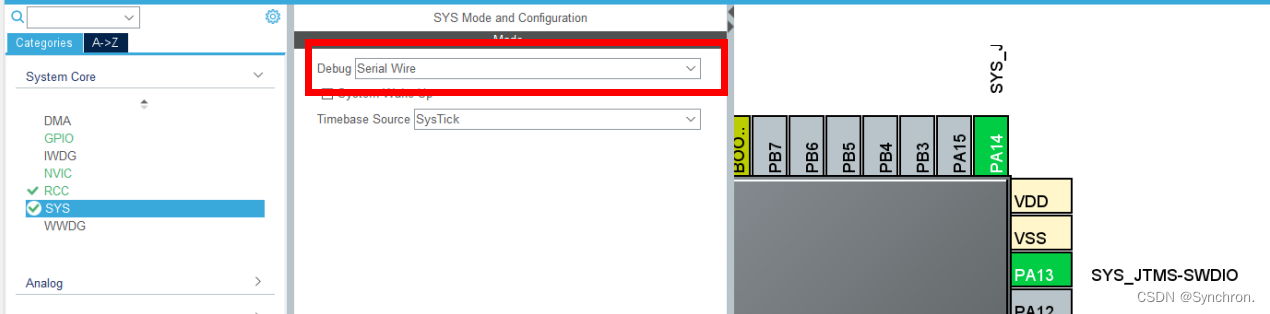
(2)���Խӿ�����
��ͼ��ʾ,�����Խӿ����õ�����ΪSWģʽ,ռ��оƬ�������š�
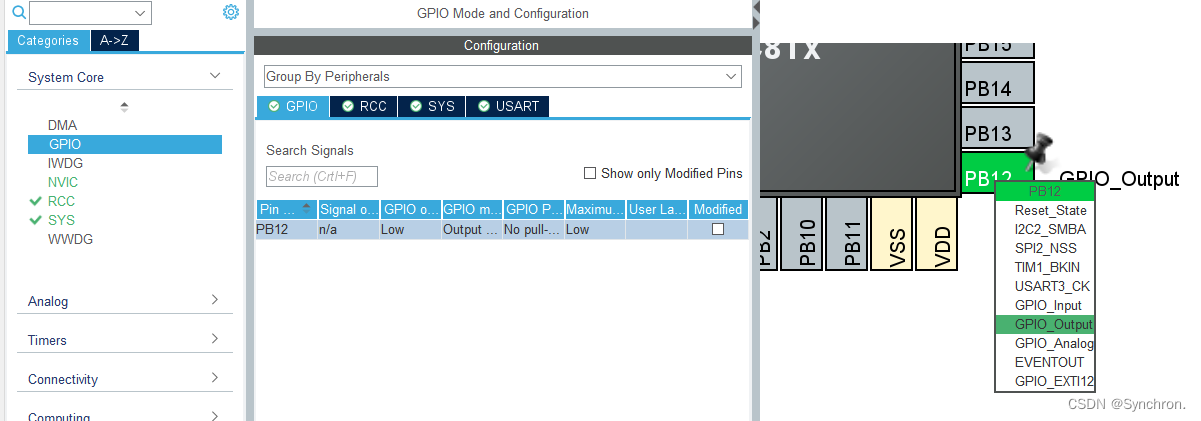
(3)GPIO����
��ͼ,��CubeMX��оƬ�������е�����������Ը��������ù��ܡ����ォPB12����Ϊ���ģʽ(����DHT11ֻ��һ��������,�����佻����ʽ�ǰ�˫��,Ҳ����������ʱ����Ҫ��̬�ı�����ŵ��������������,������ֻ��������,�����������Ҫ�ڴ�������)��
(4)��������
Ϊ��ʾ���,�ô��ڽ�ת���������������,����Ϊ�첽ģʽ,������Ϊ115200Bits/s,��UART��������ͼ��ʾ���������֮����Զ����������������ڴ���ͨ�š�

(5)TIM��ʱ������
����HAL����û���뼶��ʱ����,����������ö�ʱ��ȡ����,�ﵽ�뼶�ӳ١����ö�ʱ��Ϊ�ڲ�ʱ��,�������õ�MCU��ƵΪ72MHz,�����������(72-1)��Ƶ,�����պ���1MHz,Ҳ�ʹﵽ��1us��ʱ��,������������ʵ����ʱ������

(6)����ʹ�����
���γ��˵��Խӿں��ⲿ�ӿ���,����PB12����DHT11�����������ݴ�������,����һ�鴮��RX��TX��ʹ���������ͼ��ʾ��

(7)����
��ProjectManager����������ͼ��ʾ,���ü��ɿ�������ΪSTM32CubeIDE����������ƽ̨����IAR,KeilҲ���Զ�Ӧѡ��
��ͼ��ѡ������Χ.c.h�ļ�,����ϰ��,Ҳ���Բ���ѡ����Χ�ļ�������main�ļ��

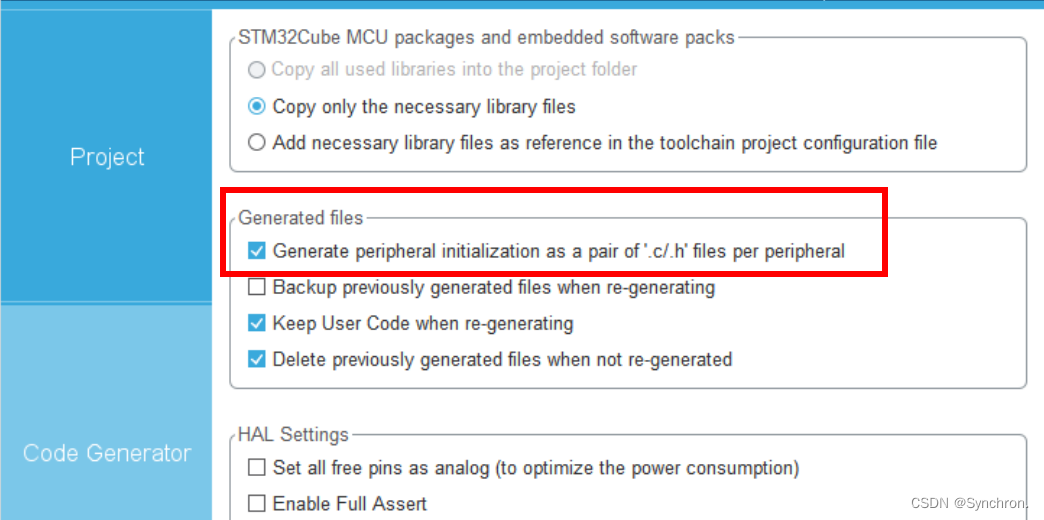
�C
2.CubeIDE����
(1)TIM��ʱ��ʵ��us����ʱ
����:ͨ����ʱ��ʵ��us���ӳ�
λ��:λ��/* USER CODE BEGIN 4 */ɳ���ڡ�
/*
*TIM3��ʱ��ʵ��us����ʱ
*/
void Delay_us(uint16_t delay)
{
__HAL_TIM_DISABLE(&htim3);
__HAL_TIM_SET_COUNTER(&htim3,0);
__HAL_TIM_ENABLE(&htim3);
uint16_t curCnt=0;
while(1)
{
curCnt=__HAL_TIM_GET_COUNTER(&htim3);
if(curCnt>=delay)
break;
}
__HAL_TIM_DISABLE(&htim3);
}
(2)��̬�ı�GPIO�������״̬
����:��̬�ı�PB12���ŵķ���,ʵ�ְ�˫�����䡣
λ��:λ��/* USER CODE BEGIN 4 */ɳ���ڡ�
/*
* ����DHT11���ŷ���
*/
// ���output
void Dht11_DATA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
// ����input
void Dht11_DATA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
(3)DHT11����
����:DHT11��������,����ʱ����ʵ�֡�
λ��:λ��/* USER CODE BEGIN 4 */ɳ���ڡ�
(ע:���ݷ�װ��˼����Щ����Ӧ���Խ�dht11.c�ļ����,����Ϊ�˷���ֱ��д����������,������ʾ,���߿����в���,�����Զ���һЩ�궨��,����Դ��������)
/*
* DHT11����
*/
//��λDHT11
void DHT11_Rst(void)
{
Dht11_DATA_OUT(); //�������
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET); //��������
HAL_Delay(20); //�ӳ�20ms
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET); //��������
Delay_us(30); //�ӳ�30us
}
//�ȴ�DHT11��Ӧ
//����ֵ:1����δ������,0����������
uint8_t DHT11_Check(void)
{
uint8_t retry=0;
Dht11_DATA_IN(); //��������
while(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
if(retry>=100)
return 1;
else
retry=0;
while(GPIO_PIN_RESET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
if(retry>=100)
return 1;
return 0;
}
//��DHT11��ȡһ��λ
//����ֵ:1/0
uint8_t DHT11_Read_Bit(void)
{
uint8_t retry=0;
while(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
retry=0;
while(GPIO_PIN_RESET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
Delay_us(40);
if(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12))
return 1;
else
return 0;
}
//��DHT11��ȡһ���ֽ�
//����ֵ:��ȡ�����ֽ�����(8λ)
uint8_t DHT11_Read_Byte(void)
{
uint8_t dat=0;
for(uint8_t i=0;i<8;i++)
{
dat <<= 1;
dat |= DHT11_Read_Bit();
}
return dat;
}
//��DHT11��ȡһ������
//humi:ʪ��ֵ,temp:�¶�ֵ
//����ֵ:0��������,1������ȡʧ��
uint8_t DHT11_Read_Data(uint8_t* humi,uint8_t* temp)
{
uint8_t buf[5];
DHT11_Rst();
if(DHT11_Check() == 0)
{
for(uint8_t i=0;i<5;i++)
buf[i]=DHT11_Read_Byte();
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0]; //����ʡ��С������
*temp=buf[2];
}
}
else
return 1;
return 0;
}
(4)ͷ�ļ�
����:ʹ�ô�ӡ����sprintf��strlen��
λ��:λ��/* USER CODE BEGIN Includes */ɳ���ڡ�
/* USER CODE BEGIN Includes */
#include <stdio.h> //sprintf����ͷ�ļ�
#include <string.h> //strlen����ͷ�ļ�
/* USER CODE END Includes */
(5)��������
����:����������
λ��:λ��/* USER CODE BEGIN PM */ɳ���ڡ�
(ע:���ݷ�װ��˼����Щ����Ӧ���Խ�dht11.h�ļ����,����Ϊ�˷���ֱ��д����������,������ʾ,���߿����в���,�����Զ���һЩ�궨��,����Դ��������)
/* USER CODE BEGIN PM */
void Delay_us(uint16_t delay); //ͨ��TIM3��ʱ���뼶��ʱ
void Dht11_DATA_OUT(void); //�������ݽ�����Ϊ���
void Dht11_DATA_IN(void); //�������ݽ�����Ϊ����
void DHT11_Rst(void); //��λDHT11
uint8_t DHT11_Check(void); //DHT11״̬����
uint8_t DHT11_Read_Bit(void); //��DHT11һλ����
uint8_t DHT11_Read_Byte(void); //��DHT11һ�ֽ�����
uint8_t DHT11_Read_Data(uint8_t* humi,uint8_t* temp); //DHT11������ʾ
/* USER CODE END PM */
(6)��������������
����:�����������ڱ�����
λ��:λ��/* USER CODE BEGIN 1 */ɳ���ڡ�
/* USER CODE BEGIN 1 */
uint8_t temperature = 1; //�¶�ֵ
uint8_t humidity = 1; //ʪ��ֵ
char* CntState = "No Connect!\r\n"; //����״̬
uint8_t aTxBuffer[50]; //��ӡ��Ϣ
/* USER CODE END 1 */
(7)DHT11Ԥ����
����:��λDHT11���Ҽ��DHT11�Ƿ���ڡ�
λ��:λ��/* USER CODE BEGIN 2 */ɳ���ڡ�
/* USER CODE BEGIN 2 */
DHT11_Rst(); //��λDHT11
while(DHT11_Check()) //���DHT11����
{
HAL_UART_Transmit(&huart1, CntState, strlen(CntState), 200);
HAL_Delay(500);
}
CntState = "Success!\r\n";
HAL_UART_Transmit(&huart1, CntState, strlen(CntState), 200);
/* USER CODE END 2 */
(8)������
����:�����õ�ַ�ĸ����ó������м����ֵ����ֱ�Ӵ�ӡ��
λ��:λ��/* USER CODE END WHILE */ɳ���ڡ�
/* USER CODE BEGIN WHILE */
while (1)
{
DHT11_Read_Data(&humidity,&temperature); //������ʪ�ȵ�ֵ
sprintf(aTxBuffer,"temperature : %d ^C "
"humidity : %d %% \r\n", temperature,humidity); //��ӡ��ʪ�ȵ�ֵ
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200);
HAL_Delay(500);
/* USER CODE END WHILE */
�ġ������ʾ
(1)ʵ����ʾ
�ϵ��,DHT11ģ���LED������
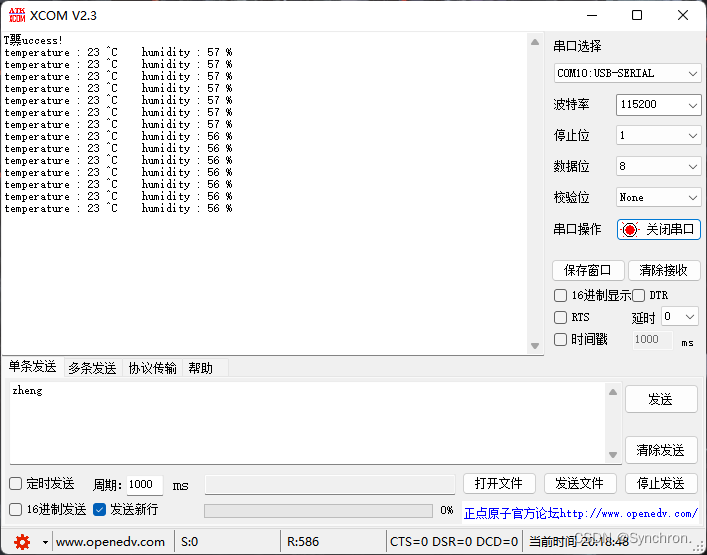
(2)���ڴ�ӡ���
�ɼ�,����ÿ500ms����λ���׳�����,�����ʾ��ȷ��
�塢�ܽ�
��������˽���DHT11������ʪ�ȴ�����,ͨ��DHT11��Э��ȡ����������,ʵʱ�����¶���ʪ�ȵ����ݡ��ڱ��������,����ѧ����HAL���е��뼶�ӳٺ����ı�д,��ѧ���˶�̬�ı�GPIO�Ĵ��䷽��,��Ϊ�Ժ��κ�һ����ʱ�������������д�춨�˻���,���ͺŵ���ʪ�ȴ�����ֻ����������,�侫�Ȳ�̫��,���߿�������������������ʪ�ȴ�����������Ʋο�����ԭ��̽���߿�����̳���STM32Cube��Ч����ָ��(��ƪ)��
��¼
��������
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h> //sprintf����ͷ�ļ�
#include <string.h> //strlen����ͷ�ļ�
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
void Delay_us(uint16_t delay); //ͨ��TIM3��ʱ���뼶��ʱ
void Dht11_DATA_OUT(void); //�������ݽ�����Ϊ���
void Dht11_DATA_IN(void); //�������ݽ�����Ϊ����
void DHT11_Rst(void); //��λDHT11
uint8_t DHT11_Check(void); //DHT11״̬����
uint8_t DHT11_Read_Bit(void); //��DHT11һλ����
uint8_t DHT11_Read_Byte(void); //��DHT11һ�ֽ�����
uint8_t DHT11_Read_Data(uint8_t* humi,uint8_t* temp); //DHT11������ʾ
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t temperature = 1; //�¶�ֵ
uint8_t humidity = 1; //ʪ��ֵ
char* CntState = "No Connect!\r\n"; //����״̬
uint8_t aTxBuffer[50]; //��ӡ��Ϣ
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
DHT11_Rst(); //��λDHT11
while(DHT11_Check()) //���DHT11����
{
HAL_UART_Transmit(&huart1, CntState, strlen(CntState), 200);
HAL_Delay(500);
}
CntState = "Success!\r\n";
HAL_UART_Transmit(&huart1, CntState, strlen(CntState), 200);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
DHT11_Read_Data(&humidity,&temperature); //������ʪ�ȵ�ֵ
sprintf(aTxBuffer,"temperature : %d ^C "
"humidity : %d %% \r\n", temperature,humidity); //��ӡ��ʪ�ȵ�ֵ
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/*
*TIM3��ʱ��ʵ��us����ʱ
*/
void Delay_us(uint16_t delay)
{
__HAL_TIM_DISABLE(&htim3);
__HAL_TIM_SET_COUNTER(&htim3,0);
__HAL_TIM_ENABLE(&htim3);
uint16_t curCnt=0;
while(1)
{
curCnt=__HAL_TIM_GET_COUNTER(&htim3);
if(curCnt>=delay)
break;
}
__HAL_TIM_DISABLE(&htim3);
}
/*
* ����DHT11���ŷ���
*/
// ���output
void Dht11_DATA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
// ����input
void Dht11_DATA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/*
* DHT11����
*/
//��λDHT11
void DHT11_Rst(void)
{
Dht11_DATA_OUT(); //�������
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET); //��������
HAL_Delay(20); //�ӳ�20ms
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET); //��������
Delay_us(30); //�ӳ�30us
}
//�ȴ�DHT11��Ӧ
//����ֵ:1����δ������,0����������
uint8_t DHT11_Check(void)
{
uint8_t retry=0;
Dht11_DATA_IN(); //��������
while(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
if(retry>=100)
return 1;
else
retry=0;
while(GPIO_PIN_RESET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
if(retry>=100)
return 1;
return 0;
}
//��DHT11��ȡһ��λ
//����ֵ:1/0
uint8_t DHT11_Read_Bit(void)
{
uint8_t retry=0;
while(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
retry=0;
while(GPIO_PIN_RESET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) && retry<100)
{
retry++;
Delay_us(1);
}
Delay_us(40);
if(GPIO_PIN_SET==HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12))
return 1;
else
return 0;
}
//��DHT11��ȡһ���ֽ�
//����ֵ:��ȡ�����ֽ�����(8λ)
uint8_t DHT11_Read_Byte(void)
{
uint8_t dat=0;
for(uint8_t i=0;i<8;i++)
{
dat <<= 1;
dat |= DHT11_Read_Bit();
}
return dat;
}
//��DHT11��ȡһ������
//humi:ʪ��ֵ,temp:�¶�ֵ
//����ֵ:0��������,1������ȡʧ��
uint8_t DHT11_Read_Data(uint8_t* humi,uint8_t* temp)
{
uint8_t buf[5];
DHT11_Rst();
if(DHT11_Check() == 0)
{
for(uint8_t i=0;i<5;i++)
buf[i]=DHT11_Read_Byte();
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}
else
return 1;
return 0;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
