ЮФеТФПТМ
ЧАбд
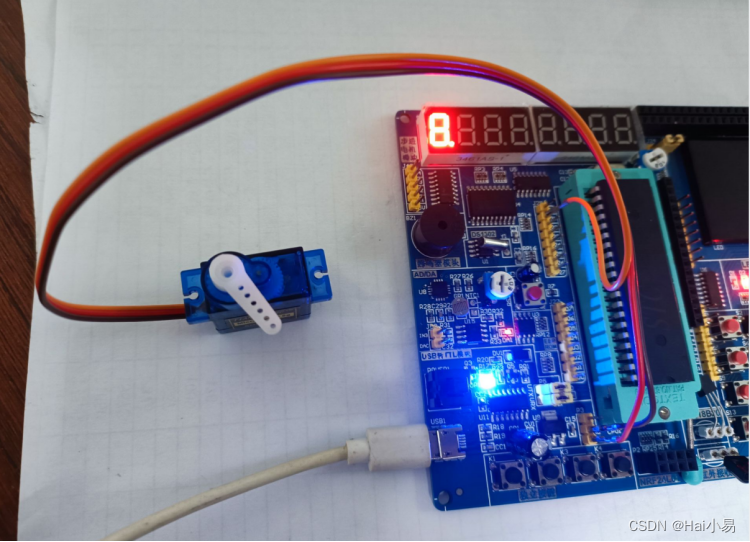
БОеТНЋЯђДѓМвНщЩмSG90ЖцЛњФЃПщЪЙгУ,ЭЈЙ§БОеТЕФбЇЯА,ШУДѓМвФмПьЫйЩЯЪж51ЕЅЦЌЛњгІгУПЊЗЂ
вЛЁЂSG90ЖцЛњФЃПщМђНщ
1.ЖцЛњМђНщ
ЖцЛњЪЧвЛжжЮЛжУ(НЧЖШ)ЫХЗўЕФЧ§ЖЏЦї,ЪЪгУФЧаЉашвЊНЧЖШВЛЖЯБфЛЏВЂПЩвдБЃГжЕФПижЦЯЕЭГЁЃЖцЛњжЛЪЧвЛжжЭЈЫзЕФНаЗЈ,ЦфЪЕжЪЪЧвЛИіЫХЗўТэДяЁЃЖцЛњжївЊЗжЮЊФЃФтЖцЛњКЭЪ§зжЖцЛњЁЃФЃФтЖцЛњ:ашвЊВЛЖЯЕФЗЂЫЭФПЕФЕиPWMаХКХ,ВХФма§зЊЕНжИЖЈЮЛжУЁЃР§Шч:ЮвЯждкШУЫќа§зЊ90ЖШ,ЮвОЭашвЊВЛЖЯЕФЗЂЫЭ90ЖШЕФPWMаХКХжБЕНЕНДяжИЖЈЮЛжУВХФмЭЃжЙЁЃЪ§зжЖцЛњ:жЛашИјвЛИіФПЕФЕиPWMаХКХ,МДПЩа§зЊЕНжИЖЈЮЛжУЁЃР§Шч:ЮвЯждкШУЫќа§зЊ90ЖШ,ЮвжЛашвЊЗЂЫЭвЛДЮ90ЖШЕФPWMаХКХ,ЫќОЭПЩвда§зЊЕН90ЖШЁЃ
SG90ФЃФтЖцЛњдкЪаУцЩЯЪЎЗжГЃМћ,МлИёвВБШНЯБувЫЁЃГЃгУгкКНФЃ,ЛњЦїШЫЛђжЧФмаЁГЕЕШЁЃШчЯТЭМЫљЪО:

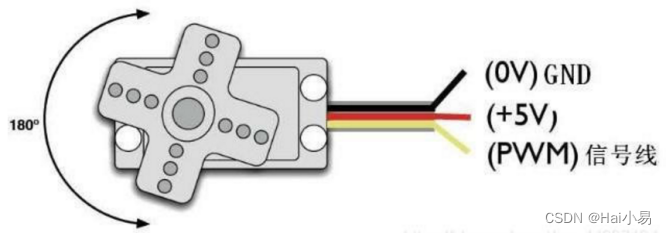
вЛИіЖцЛњгаШ§ЬѕЯп:VCC(КьЯп)ЁЂGND(зиЩЋЯп)КЭаХКХЯп(ГШЩЋЯп)ЁЃжЛвЊЭЈЙ§аХКХЯпИјгшЙцЖЈЕФПижЦаХКХМДПЩЪЕЯжЖцЛњТыХЬЕФзЊЖЏЁЃ
2.ФЃПщВЮЪ§
(1)ФЃПщжївЊЕчЦјВЮЪ§
?ЪЙгУЕчбЙ:4.8V-6V
?ГпДч:221.5mmX11.8mmX22.7mm
?жиСП:9g
?ЮоИКдиЫйЖШ:0.12S/60ЖШ(4.8V)
?ЖТзЊХЄОи:1.2-1.4ЙЋНя/cm(4.8V)
?ЪЙгУЮТЖШ:-30~+60ЩуЪЯЖШ
?ЫРЧјЩшЖЈ:7us
?ИпОЋЖШ ПЩДя0.2cm
(2)ФЃПщв§НХ
вЛИіЖцЛњгаШ§ЬѕЯп:VCC(КьЯп)ЁЂGND(зиЩЋЯп)КЭаХКХЯп(ГШЩЋЯп)ЁЃжЛвЊЭЈЙ§аХКХЯпИјгшЙцЖЈЕФПижЦаХКХМДПЩЪЕЯжЖцЛњТыХЬЕФзЊЖЏЁЃ
3.ФЃПщЙЄзїдРэ
ЖцЛњФкВПгавЛИіЛљзМЕчбЙ,ЮЂДІРэЦїВњЩњЕФPWMаХКХЭЈЙ§аХКХЯпНјШыЖцЛњВњЩњжБСїЦЋжУЕчбЙ,гыЖцЛњФкВПЕФЛљзМЕчбЙзїБШНЯ,ЛёЕУЕчбЙВюЪфГіЁЃЕчбЙВюЕФе§ИКЪфГіЕНЕчЛњЧ§ЖЏаОЦЌЩЯ,ДгЖјОіЖЈе§ЗДзЊЁЃЕБЖцЛњПЊЪМа§зЊЕФЪБКђ,ЖцЛњФкВПЭЈЙ§МЖСЊМѕЫйГнТжДјЖЏЕчЮЛЦїа§зЊ,ЪЙЕУЕчбЙВюЮЊСу,ЕчЛњЭЃжЙзЊЖЏЁЃ
ЮвУЧЮоашСЫНтЦфФкВПЙЙдь,жЛашжЊЕРШчКЮЭЈЙ§PWMПижЦЦфзЊЖЏМДПЩЁЃ
ЂйЮвУЧашвЊЪЙгУЕЅЦЌЛњВњЩњжмЦкЮЊ20ms,ИпЕчЦНtЕШгк0.5ms-2.5msжЎМфЕФетбљвЛИіЗНВЈЁЃПЩвдЪЙгУЖЈЪБЦї+жаЖЯВњЩњетбљЕФЗНВЈЁЃВЈаЮШчЯТЫљЪО:
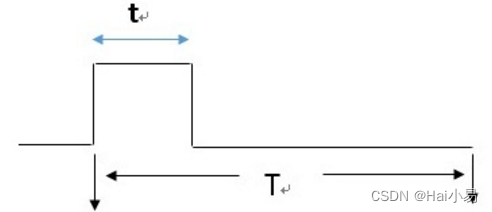
ИпЕчЦНдквЛИіжмЦк(20ms)ЕФГжајЪБМфЖдгІЕФЖцЛњНЧЖШ,ШчЯТЭМЫљЪО:

ЂкМђЕЅНВвЛЯТБрГЬЫМЯы,ЮвЫљЪЙгУЕФЪЧЗНЗЈЪЧЖЈЪБЦї+жаЖЯ,ЖЈЪБЦїУП0.5msжаЖЯвЛДЮ,ашвЊжаЖЯ40ДЮВХФмДяЕН20msЁЃЮвУЧДЫЪБашвЊвЛИіШЋОжБфСПРДМЧТМжаЖЯЕФДЮЪ§,ЕБжаЖЯДяЕН40ДЮЪБ,ШЋОжБфСПжиаТЧхСуЁЃЕБжаЖЯДЮЪ§аЁгкaЪБ,аХКХЯпЪфГіИпЕчЦН,ЗёдђЪфГіСуЁЃДЫЪБaЕФжЕЖдгІЙиЯЕШчЯТ(1ЈC0ЖШ,2ЈC45ЖШ,3ЈC90ЖШ,4ЈC135ЖШ,5ЈC180ЖШ)ЁЃ
ИУЗНЗЈдкЛљДЁЪЕбщDACЪЕбщвбОНВНт,ЦфЪЕОЭЪЧВњЩњPWM,ЭЈЙ§ПижЦPWMеМПеБШРДПижЦЖцЛња§зЊНЧЖШЁЃ
ЖўЁЂгВМўЩшМЦ
1.гВМўзМБИ
БОЪЕбщЫљашвЊЕФгВМўзЪдДШчЯТ:
ЂйЦежа51ПЊЗЂАх1Иі
ЂкSG90ЖцЛњФЃПщ1Иі
ЂлUSBЯп1Ьѕ(гУгкЙЉЕчКЭГЬађЯТди)
2.гВМўСЌНг
НгЯпЫЕУї:SG90ЖцЛњФЃПщЈC>ЕЅЦЌЛњIO
ГШЩЋ(аХКХЯп)ЈC>P21
КьЩЋ(ЕчдДе§)ЈC>5V
КжЩЋ(ЕчдДИК)ЈC>GND
ЖРСЂАДМќФЃПщ-->ЕЅЦЌЛњIO
K1-->P31
K2-->P30
Ш§ЁЂШэМўЩшМЦ
БОЪЕбщГЬађЪЧдкПЊЗЂАхЛљДЁЪЕбщЁАLCD1602вКОЇЯдЪОЪЕбщЁБЛљДЁЩЯаоИФ,дкAppЮФМўМаФкаТНЈСЫkeyЁЂpwmЮФМўМагУгкДцЗХАДМќКЭPWMЯрЙиЕФЧ§ЖЏГЬађ,дкИУЮФМўМаФкОљаТНЈСЫ2ИіЮФМў,вЛИі.cдДЮФМўКЭвЛИі.hЭЗЮФМўЁЃНЋИУЮФМўЬэМгЕНAppЙЄГЬзщжа,ВЂЬэМгЖдгІЭЗЮФМўТЗОЖ,етаЉВйзїШчЙћВЛЛсЧыПДЛљДЁЪЕбщЪгЦЕНЬГЬ,ДЫДІВЛдйжиИДЁЃЬэМгКУЕФЙЄГЬШчЯТЫљЪО:
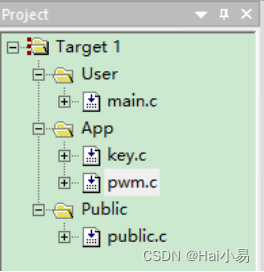
key.cЪЧЖРСЂАДМќЪЕбщЯрЙиДњТы,PWMЪЧDACЪЕбщДњТы,ЮвУЧНіЖдSG90ЖцЛњПижЦЯрЙиДњТыНјааНВНт,ЦфЫќДњТыПДЛљДЁЪЕбщНЬГЬЁЃ
1.main.cЮФМў
main.cЮФМўБШНЯМђЕЅ,ОЭЪЧНЋЧАУцЕФЙІФмДњТыНјааећКЯЁЃШчЯТ:
/**************************************************************************************
ЪЕбщУћГЦ:SG90ЖцЛњЪЕбщ
НгЯпЫЕУї:SG90ЖцЛњФЃПщ-->ЕЅЦЌЛњIO
ГШЩЋ(аХКХЯп)-->P21
КьЩЋ(ЕчдДе§)-->5V
КжЩЋ(ЕчдДИК)-->GND
ЖРСЂАДМќФЃПщ-->ЕЅЦЌЛњIO
K1-->P31
K2-->P30
ЪЕбщЯжЯѓ:ЯТдиГЬађКѓ,АДЯТK1МќПижЦЖцЛње§зЊ,АДЯТK2МќПижЦЖцЛњЗДзЊ
зЂвтЪТЯю:
***************************************************************************************/
#include "public.h"
#include "key.h"
#include "pwm.h"
/*******************************************************************************
* КЏ Ъ§ Ућ : main
* КЏЪ§ЙІФм : жїКЏЪ§
* Ъф Шы : Юо
* Ъф Гі : Юо
*******************************************************************************/
void main()
{
u8 key=0;
u8 duty_value=0;
pwm_init(0XFE,0X33,40,duty_value);//ЖЈЪБЪБМфЮЊ0.5ms,PWMжмЦкЪЧ40*0.5ms=20ms,ГѕЪМеМПеБШЮЊ0ms
while(1)
{
key=key_scan(0);
if(key==KEY1_PRESS)
{
if(duty_value<=3)
duty_value+=1;//вд0.5msВННјЕнді45ЖШ
pwm_set_duty_cycle(duty_value);
}
else if(key==KEY2_PRESS)
{
if(duty_value>=1)
duty_value-=1;//вд0.5msВННјЕнМѕ
pwm_set_duty_cycle(duty_value);
}
}
}
дкmainКЏЪ§жа,ЪзЯШЕїгУpwm_init(0XFE,0X33,40,duty_value)КЏЪ§,НЋЖЈЪБЦї0жаЖЯЪБМфЩшжУЮЊ0.5ms,МДУП0.5msНјШывЛДЮжаЖЯ,PWMжмЦкЮЊ400.5ms=20msЁЃеМПеБШЭЈЙ§БфСПduty_valueИФБф,ГѕжЕЮЊ0,ДЫЪБЖцЛњФЌШЯЮЊ0ЖШЁЃШЛКѓНјШыwhileбЛЗжа,МьВтK1КЭK2МќЪЧЗёАДЯТ,ШєK1МќАДЯТ,duty_valueМг1,МДвд0.5msЮЊВННјдіМг,ЧваоИФеМПеБШжЕ,ДЫЪБЖцЛњвВвд45ЖШаоИФ,зюДѓдіМгЕН4,МД2msИпЕчЦН(445ЖШ=180ЖШ,КЭРэТлжаИпЕчЦНЪБМфЖдгІНЧЖШгаЦЋВю,ЕЋвРШЛЪЧ180ЖШа§зЊ)ЁЃШєK2МќАДЯТ,duty_valueМѕ1,МДвд0.5msЮЊВННјЕнМѕ,ЧваоИФеМПеБШжЕ,ДЫЪБЖцЛњвВвд45ЖШаоИФ,зюаЁМѕЕН0ЁЃ
ЫФЁЂЪЕбщЯжЯѓ
BеОбнЪОЪгЦЕ:https://space.bilibili.com/444388619
СЊЯЕзїеп
BеОбнЪОЪгЦЕ:https://space.bilibili.com/444388619
зЈзЂгк51ЕЅЦЌЛњЁЂSTM32ЁЂЙњВњ32ЁЂDSPЁЂProteusЁЂardunioЁЂESP32ЁЂЮяСЊЭјШэМўПЊЗЂ,PCBЩшМЦ,ЪгЦЕЗжЯэ,ММЪѕНЛСїЁЃ