ФПТМ
ЖЈЪБЦї
1.МђНщ
C51жаЕФЖЈЪБЦїКЭМЦЪ§ЦїЪЧЭЌвЛИігВМўЕчТЗжЇГжЕФ,ЭЈЙ§МФДцЦїХфжУВЛЭЌ,ОЭПЩвдНЋЫћЕБзіЖЈЪБЦї
ЛђепМЦЪ§ЦїЪЙгУЁЃ
ШЗЧаЕФЫЕ,ЖЈЪБЦїКЭМЦЪ§ЦїЧјБ№ЪЧжТЪЙЫћУЧБГКѓЕФМЦЪ§ДцДЂЦїМг1ЕФаХКХВЛЭЌЁЃЕБХфжУЮЊЖЈЪБЦїЪЙ
гУЪБ,УПОЙ§1ИіЛњЦїжмЦк,МЦЪ§ДцДЂЦїЕФжЕОЭМг1ЁЃЖјЕБХфжУЮЊМЦЪ§ЦїЪБ,УПРДвЛИіИКЬјБфаХКХ
(аХКХДгP3.4 ЛђепP3.5в§НХЪфШы),ОЭМг1,вдДЫДяЕНМЦЪ§ЕФФПЕФЁЃ
БъзМC51га2ИіЖЈЪБЦї/МЦЪ§Цї:T0КЭT1ЁЃЫћУЧЕФЪЙгУЗНЗЈвЛжТЁЃC52ЯрБШC51ЖрСЫвЛИіT2
2.ИХФюНтЖС
- ЖЈЪБЦїКЭМЦЪ§Цї,ЕчТЗвЛбљ
- ЖЈЪБЛђепМЦЪ§ЕФБОжЪОЭЪЧШУЕЅЦЌЛњФГИіВПМўЪ§Ъ§
- ЕБЖЈЪБЦїгУЕФЪБКђ,ППФкВПе№ЕДЕчТЗЪ§Ъ§
- ЕБМЦЪ§ЦїгУЕФЪБКђ,Ъ§ЭтУцЕФаХКХ,ЖСШЁеыНХЕФЪ§Он
3. ЖЈЪБЦїдѕУДЖЈЪБ
ЖЈЪБЦїЕФБОжЪдРэ: УПОЙ§вЛИіЛњЦїжмЦк,ОЭМг1 :МФДцЦї
- ЪВУДЪЧОЇеё?
ОЇеё(ОЇЬхе№ЕДЦї),гжГЦЪ§зжЕчТЗЕФЁАаФдрЁБ,ЪЧИїжжЕчзгВњЦЗРяУцБиВЛПЩЩйЕФЦЕТЪдЊЦїМўЁЃЪ§зжЕч
ТЗЕФЫљгаЙЄзїЖМРыВЛПЊЪБжг,ОЇеёЕФКУЛЕЁЂОЇеёЕчТЗЩшМЦЕФКУЛЕ,ЛсгАЯьЕНећИіЯЕЭГЕФЮШЖЈадЁЃ
- ЪВУДЪЧЪБжгжмЦк
-ЪБжгжмЦквВГЦЮЊеёЕДжмЦк,ЖЈвхЮЊЪБжгЦЕТЪЕФЕЙЪ§ЁЃЪБжгжмЦкЪЧМЦЫуЛњжазюЛљБОЕФЁЂзюаЁЕФЪБМфЕЅ
ЮЛЁЃдквЛИіЪБжгжмЦкФк,CPUНіЭъГЩвЛИізюЛљБОЕФЖЏзїЁЃЪБжгжмЦкЪЧвЛИіЪБМфЕФСПЁЃИќаЁЕФЪБжгжм ЦкОЭвтЮЖзХИќИпЕФЙЄзїЦЕТЪ
- ЪВУДЪЧЛњЦїжмЦк
ЛњЦїжмЦквВГЦЮЊCPUжмЦкЁЃдкМЦЫуЛњжа,ЮЊСЫБугкЙмРэ,ГЃАбвЛЬѕжИСюЕФжДааЙ§ГЬЛЎЗжЮЊШєИЩИіНз
ЖЮ(ШчШЁжИЁЂвыТыЁЂжДааЕШ),УПвЛНзЖЮЭъГЩвЛИіЛљБОВйзїЁЃЭъГЩвЛИіЛљБОВйзїЫљашвЊЕФЪБМфГЦЮЊ
ЛњЦїжмЦкЁЃвЛАуЧщПіЯТ,вЛИіЛњЦїжмЦкгЩШєИЩИіЪБжгжмЦкзщГЩ
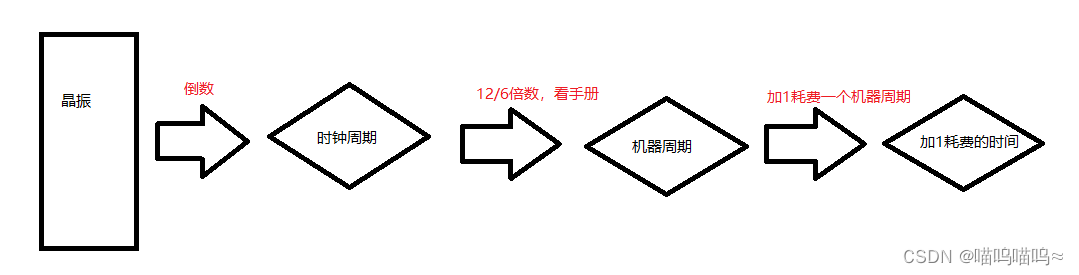
- Мг1ОЙ§СЫЖрЩйЪБМф?
- ЕБОЇеёЦЕТЪЪЧ11.0592MHzЕФЪБКђ,ЕШгк11059.2KHz = 11059200Hz
ЛњЦїжмЦк = 12 x ЪБжгжмЦк =12 x (1/ЪБжгЦЕТЪ) Уы = 12 / ЪБжгЦЕТЪ Уы = 12 / 11059200 Уы = 12
000 000 / 11059200 ЮЂУы = 1.085 ЮЂУы
4. ЖЈЪБЦїБрГЬ
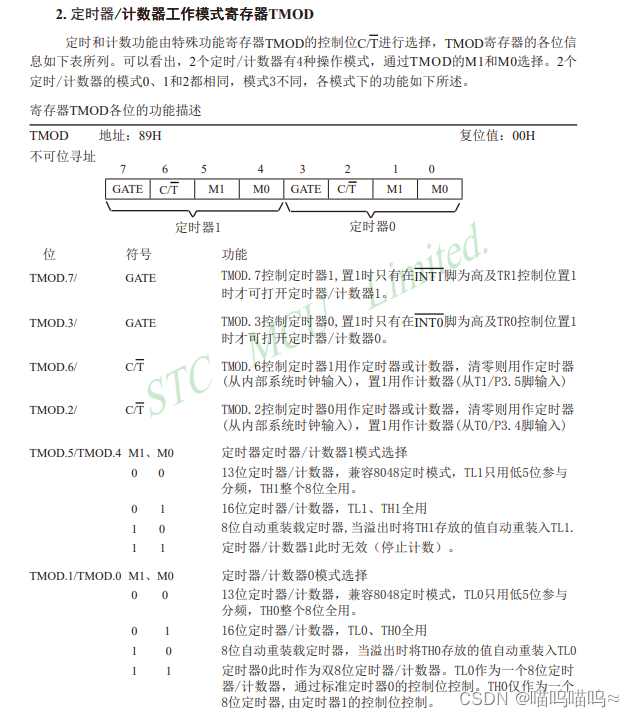
ЖЈЪБЦї/МЦЪ§Цї0КЭ1ЕФЯрЙиМФДцЦї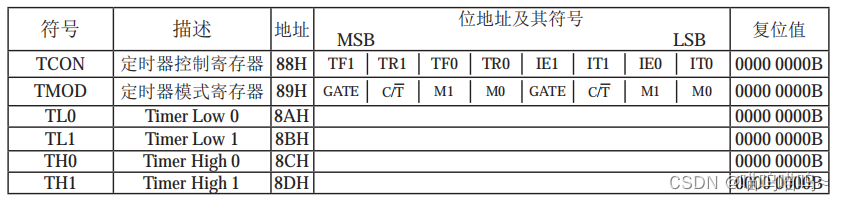
ХфжУTMOD,ОЭЪЧХфжУЙЄзїМФДцЦїЙЄзїФЃЪН

ЖЈЪБЦїФЃЪНМФДцЦї:TMODРДбЁдёЖЈЪБЦїФЃЪН,бЁдёЙЄзїЗНЪН1,TMODЕФbit0 bit1ХфжУГЩ0 1 :16
ЕФЖЈЪБЦїЙІФм
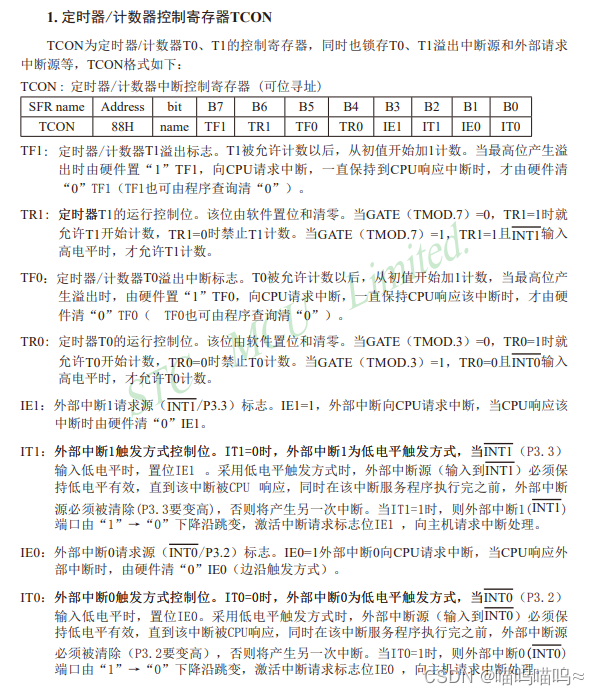
ХфжУTCON,ОЭЪЧХфжУЖЈЪБЦї/МЦЪ§Цї
- дѕУДжЊЕРБЌБэ
TCONМФДцЦїЕФbit5(TF0)ФмБэЪОБЌБэ:ЕББЌБэЕФЪБКђ,гВМўЛсаоИФbit5(TF0)ЮЛЩЯУцЕФЪ§Он,ИФГЩ1(жУ1),ШчЙћВЛгУжаЖЯ,ЮвУЧДњТыЧхСу
- дѕУДПЊЪММЦЪБ
-TCONМФДцЦїЕФbit4,ЭЈЙ§БрГЬШУетИіЮЛЮЊ1ЕФЪБКђ,ПЊЪММЦЪБ,ЯрЕБгкАДЯТСЫФжжг
- ЙигкTH0/1КЭTL0/1МФДцЦї -
- дкФФРяМг1,зюДѓМЦЪ§ЪБМф,вВОЭЪЧБЌБэСЫФмМЦЫуЖрГЄ
дкTH0/1КЭTL0/1МФДцЦїжаМг1,ФЌШЯЪЧДг0ПЊЪМЪ§Ъ§,зюЖрФмЪ§65536ЯТ,РлМЦМЦЪБ71ms
- ШчКЮЫуГі10msЖЈЪБЦїЕФГѕжЕ
-ОЭВЛШУЫћДг0ПЊЪМЪ§Ъ§,10msашвЊЪ§9216ЯТ,ФуШУЫћДг65536-9126=56320(16НјжЦБэЪОЮЊ
0xDC00)ПЊЪМЪ§Ъ§ етбљTL0=0x00;TH0=0xDC
ЙигкХфжУМФДцЦїЕФвЛаЉжУЮЛВйзї
ЫФИіЖўНјжЦЪ§БэЪОвЛЮЛЕФ16НјжЦЪ§
8421ЗЈНјжЦЕФзЊЛЛ(ЗНБуШЫРрРДПД,ЖдМЦЫуЛњЕзВуРДЫЕ,ВЛЙиаФНјжЦ010101010)
ХфМФДцЦїЭЦМігУАДЮЛВйзї,ЧхСуЕФЪБКђ,ЖдгІЕФашвЊЧхСуЕФЮЛгыЩЯ0,ВЛашвЊЧхСуЕФЮЛгыЩЯ1жУ1ЕФЪБКђ,ашвЊжУ1ЕФЮЛжУЛђ1,ВЛашвЊжУвЛЕФЮЛжУЛђ0
жаЖЯ
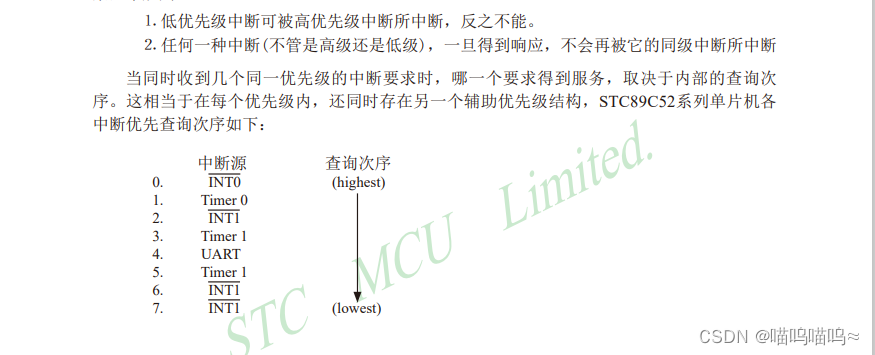
ИХФю
дкДІРэЦїжа,жаЖЯЪЧвЛИіЙ§ГЬ,МДCPUдке§ГЃжДааГЬађЕФЙ§ГЬжа,гіЕНЭтВП/ФкВПЕФНєМБЪТМўашвЊДІРэ,днЪБжажЙЕБЧАГЬађЕФжДаа,зЊЖјШЅДІРэНєМБЕФЪТЮя,Д§ДІРэЭъБЯКѓдйЗЕЛиБЛДђЖЯЕФГЬађДІМЬајЭљЯТжДааЁЃжаЖЯдкМЦЫуЛњЖрШЮЮёДІРэ,гШЦфЪЧМДЪБЯЕЭГгШЮЊживЊЁЃБШШчuCOS,FreeRTOSЕШЁЃ
втвх:
жаЖЯФмЬсИпCPUЕФаЇТЪ,ЭЌЪТФмЙЛЖдЭЛЗЂЪТМўзіГіЪЕЪБДІРэЁЃЪЕЯжГЬађЕФВЂааЛЏ,ЪЕЯжЧЖШыЪНЯЕЭГНјГЬжЎМфЕФЧаЛЛЁЃ
жаЖЯНсЙЙ
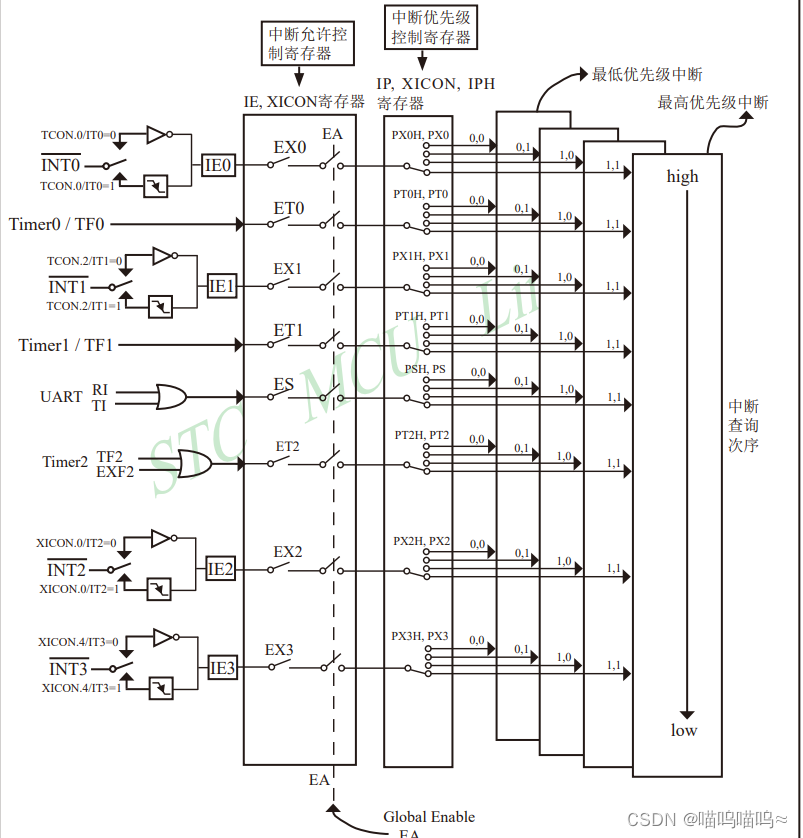
жаЖЯМФДцЦї

гЩЩЯУцПДГі,МйШчCPUФмЯьгІЖЈЪБЦї0жаЖЯЕФЬѕМў:ашвЊХфжУIEМФДцЦїЕФbit1: ET0 bit7:EA,МД
- ET0жаЖЯдЪаэвЊжУвЛ ET0 = 1
- EAзмжаЖЯвЊжУвЛ EA = 1
жаЖЯгХЯШМЖ
жаЖЯКЏЪ§ЕФИёЪН
ШчЙћЪЙгУCгябдБрГЬ,жаЖЯВщбЏДЮађКХОЭЪЧжаЖЯКХ,Р§Шч:
void Int0_Routine(void) interrupt 0;
void Timer0_Rountine(void) interrupt 1;
void Int1_Routine(void) interrupt 2;
void Timer1_Rountine(void) interrupt 3;
void UART_Routine(void) interrupt 4;
void Timer2_Routine(void) interrupt 5;
void Int2_Routine(void) interrupt 6;
void Int3_Routine(void) interrupt 7;
жаМфУћзжПЩвдздааИФ
/*******************************************************
*********ЖЈЪБЦїжаЖЯПижЦLEDУПИє1УыССУ№вЛДЮ********************
*****mainжаПижЦСэЭтвЛИіЕЦУПИі300msССУ№вЛДЮ,гаЕуЖрЯпГЬЕФвтЫМСЫ***
*******************************************************/
#include "reg52.h"
sbit led = P3^6;
sbit led1 = P3^7;
int cnt = 0;
void Time0Init()
{
//1. ХфжУЖЈЪБЦї0ЙЄзїФЃЪНЮЛ16ЮЛМЦЪБ
TMOD = 0x01;
//2. ИјГѕжЕ,ЖЈвЛИі10msГіРД
TL0=0x00;
TH0=0xDC;
//3. ПЊЪММЦЪБ
TR0 = 1;
TF0 = 0;
//4. ДђПЊЖЈЪБЦї0жаЖЯ
ET0 = 1;
//5. ДђПЊзмжаЖЯEA
EA = 1;
}
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
led = 1;
Time0Init();
while(1){
led1 = 0;
Delay300ms();
led1 = 1;
Delay300ms();
}
}
void Time0Handler() interrupt 1
{
cnt++; //ЭГМЦБЌБэЕФДЮЪ§
//жиаТИјГѕжЕ
TL0=0x00;
TH0=0xDC;
if(cnt == 100){//БЌБэ100ДЮ,ОЙ§СЫ1s
cnt = 0; //ЕБ100ДЮБэЪО1s,жиаТШУcntДг0ПЊЪМ,МЦЫуЯТвЛДЮЕФ1s
led = !led;//УПОЙ§1s,ЗзЊledЕФзДЬЌ
}
}
PWMПЊЗЂSG90
МђНщ
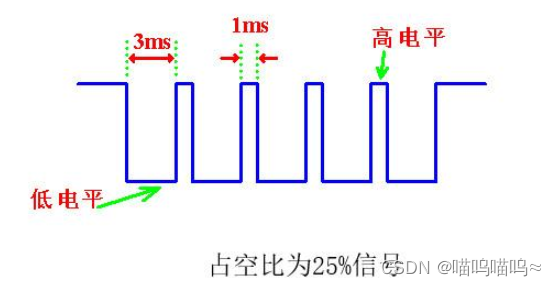
PWM,гЂЮФУћPulse Width Modulation,ЪЧТіГхПэЖШЕїжЦЫѕаД,ЫќЪЧЭЈЙ§ЖдвЛЯЕСаТіГхЕФПэЖШНј
ааЕїжЦ,ЕШаЇГіЫљашвЊЕФВЈаЮ(АќКЌаЮзДвдМАЗљжЕ),ЖдФЃФтаХКХЕчЦННјааЪ§зжБрТы,вВОЭЪЧЫЕЭЈ
Й§ЕїНкеМПеБШЕФБфЛЏРДЕїНкаХКХЁЂФмСПЕШЕФБфЛЏ,еМПеБШОЭЪЧжИдквЛИіжмЦкФк,аХКХДІгкИпЕчЦНЕФ
ЪБМфеМОнећИіаХКХжмЦкЕФАйЗжБШ,Р§ШчЗНВЈЕФеМПеБШОЭЪЧ50%
- ЭЈЙ§еМПеБШБрТыФЃФтаХКХ
- еМПеБШ вЛИіжмЦкФк,ИпЕчЦНеМОнЪБГЄЕФАйЗжБШ
ШчКЮЪЕЯжPWMаХКХЪфГі
- ЭЈЙ§аОЦЌФкВПФЃПщЪфГі,вЛАуЙлВьЪжВсЛђепаОЦЌIOПкЖМЛсБъУїетИіЪЧЗёЪЧPWMПк
ШчЯТЭМдіЧП51,STC15wЕФCPU
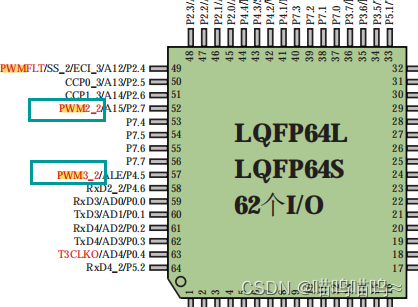
- ШчЙћУЛгаМЏГЩPWMЙІФм,ПЩвдЭЈЙ§IOПкШэМўФЃФт,ЯрЖдгВМўPWMРДЫЕОЋзМЖШТдВю
ПижЦЖцЛњ
ЪВУДЪЧЖцЛњ?
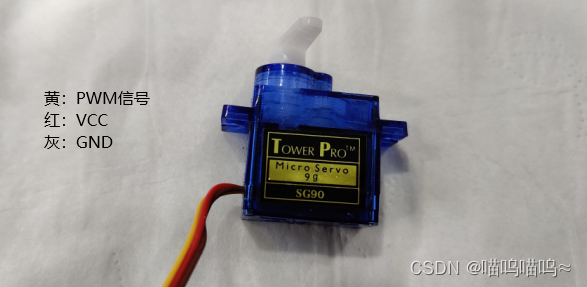
ШчЯТЭМЫљЪО,зюБувЫЕФЖцЛњsg90,ГЃгУШ§ИљЛђепЫФИљНгЯп,ЛЦЩЋЮЊPWMаХКХПижЦ
гУДІ:РЌЛјЭАЯюФППЊИЧгУЁЂжЧФмаЁГЕЕФШЋБШР§зЊЯђЁЂЩуЯёЭЗдЦЬЈЁЂЛњаЕБлЕШ
ГЃМћЕФга0-90ЁуЁЂ0-180ЁуЁЂ0-360Ёу
- дѕУДПижЦЖцЛњ
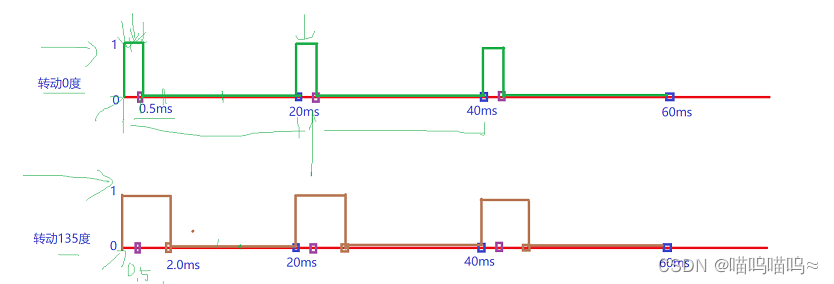
ЯђЛЦЩЋаХКХЯпЁАЙрШыЁБPWMаХКХ - PWMВЈЕФЦЕТЪВЛФмЬЋИп,ДѓдМ50HZ,МДжмЦк=1/ЦЕТЪ=1/50=0.02s,20msзѓгв
Ъ§Он:
0.5ms-------------0ЖШ; 2.5% ЖдгІКЏЪ§жаеМПеБШЮЊ250
1.0ms------------45ЖШ; 5.0% ЖдгІКЏЪ§жаеМПеБШЮЊ500
1.5ms------------90ЖШ; 7.5% ЖдгІКЏЪ§жаеМПеБШЮЊ750
2.0ms-----------135ЖШ; 10.0% ЖдгІКЏЪ§жаеМПеБШЮЊ1000
2.5ms-----------180ЖШ; 12.5% ЖдгІКЏЪ§жаеМПеБШЮЊ1250
Р§ШчЖЈЪБЦїашвЊЖЈЪБ20ms, ЙиаФЕФЕЅЮЛ0.5ms, 40ИіЕФ0.5ms,ГѕжЕ0.5ms cnt++
20ms = 0.5ms * 40
3.БрГЬЪЕЯж
/*******************************************************
*********ЖцЛњЛЦЩЋаХКХЯпНгP1.1Пк,УПИє2УыДг0ЖШЕН135ЖШЧаЛЛ********
*************зЂвт:ГѕжЕВЛвЊЫуДэ,аоИФЮЛжУСНИіЕиЗН**************
*******************************************************/
#include <stdio.h>
#include <reg51.h>
#include<intrins.h>
sbit sg90_com = P1^1;
int cnt = 0;
int jd = 0;
void Timer0Init(void) //500ЮЂУы@11.0592MHz
{
AUXR &= 0x7F; //ЖЈЪБЦїЪБжг12TФЃЪН
TMOD &= 0xF0; //ЩшжУЖЈЪБЦїФЃЪН
TMOD |= 0x01; //ЩшжУЖЈЪБЦїФЃЪН
TL0 = 0x33; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0xFE; //ЩшжУЖЈЪБГѕжЕ
TF0 = 0; //ЧхГ§TF0БъжО
TR0 = 1; //ЖЈЪБЦї0ПЊЪММЦЪБ
EA = 1; //ДђПЊзмжаЖЯ 1ПЊ 0Йи
ET0 = 1; //ДђПЊЖЈЪБЦї0жаЖЯ
}
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
int main()
{
jd = 1;
sg90_com = 0;
Delay300ms();
Timer0Init(); //УПБЌБэвЛДЮ,ОЭДЅЗЂжаЖЯ,гВМўЕїгУжаЖЯКЏЪ§
while(1){
jd = 3;
cnt = 0;
Delay2000ms();
jd = 4;
cnt = 0;
Delay2000ms();
jd = 1;
Delay2000ms();
}
return 0;
}
void Timer0_Rountine() interrupt 1
{
cnt++;
TL0 = 0x33; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0xFE; //ЩшжУЖЈЪБГѕжЕ
if(cnt < jd){
sg90_com = 1;
}else {
sg90_com = 0;
}
if(cnt == 40){
cnt = 0;
sg90_com = 1;
}
}
ГЌЩљВЈВтОр
МђНщ
ГЌЩљВЈВтОрФЃПщЪЧгУРДВтСПОрРыЕФвЛжжВњЦЗ,ЭЈЙ§ЗЂЫЭКЭЪеГЌЩљВЈ,РћгУЪБМфВюКЭЩљвєДЋВЅЫйЖШ, МЦЫуГіФЃПщЕНЧАЗНеЯАЮяЕФОрРыЁЃ
аЭКХ:HC-SR04

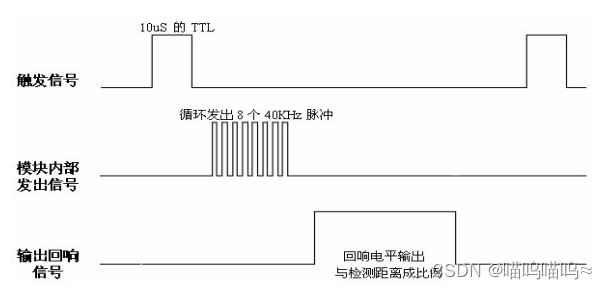
НгЯпВЮПМ:ФЃПщГ§СЫСНИіЕчдДв§НХЭт,ЛЙгаTRIG,ECHOв§НХ,етСНИів§НХЗжБ№НгЮвУЧПЊЗЂАхЕФP1.5КЭP1.6ЖЫПк
- дѕУДШУЫќЗЂЫЭВЈ
Trig ,ИјTrigЖЫПкжСЩй10usЕФИпЕчЦН
- дѕУДжЊЕРЫќПЊЪМЗЂСЫ
EchoаХКХ,гЩЕЭЕчЦНЬјзЊЕНИпЕчЦН,БэЪОПЊЪМЗЂЫЭВЈ дѕУДжЊЕРНгЪеСЫЗЕЛиВЈ
Echo,гЩИпЕчЦНЬјзЊЛиЕЭЕчЦН,БэЪОВЈЛиРДСЫ
- дѕУДЫуЪБМф
Echoв§НХЮЌГжИпЕчЦНЕФЪБМф! ВЈЗЂГіШЅЕФФЧвЛЯТ,ПЊЪМЦєЖЏЖЈЪБЦї ВЈЛиРДЕФФУвЛЯТ,ЮвУЧПЊЪМЭЃжЙЖЈЪБЦї,МЦЫуГіжаМфОЙ§ЖрЩйЪБМф
- дѕУДЫуОрРы
ОрРы = ЫйЖШ (340m/s)* ЪБМф/2
ЪБађЭМ
#include <stdio.h>
#include <reg51.h>
#include<intrins.h>
//ОрРыаЁгк10cm,beepЯь,ЗДжЎЯрЗДЯжЯѓ
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit Beep = P1^2;
void Delay200us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 89;
while (--i);
}
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Timer0Init(void) //0ЮЂУы@11.0592MHz
{
AUXR &= 0x7F; //ЖЈЪБЦїЪБжг12TФЃЪН
TMOD &= 0xF0; //ЩшжУЖЈЪБЦїФЃЪН
TMOD |= 0x01; //ЩшжУЖЈЪБЦїФЃЪН
TL0 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TF0 = 0; //ЧхГ§TF0БъжО
}
void Delay1000us() //@11.0592MHz
{
unsigned char i, j;
_nop_();
i = 2;
j = 199;
do
{
while (--j);
} while (--i);
}
void Trigger_signal() //ДЅЗЂаХКХ,ШУФЃПщФкВПЗЂВЈ
{
Trig = 0;
Delay200us();
Trig = 1;
Delay10us();
Trig = 0;
}
int main()
{
double time;
double dis;
Beep = 1;
Timer0Init();
while(1){
Trigger_signal();
while(Echo == 0);
TR0 = 1; //ЖЈЪБЦї0ПЊЪММЦЪБ
while(Echo == 1);
TR0 = 0; //ЖЈЪБЦї0ЭЃжЙМЦЪБ
time = (TH0*256 + TL0)*1.085;//ЕЅЮЛЮЊus
dis = time*0.017; //етРяЛЛЫуЮЊРхУзСЫ
if(dis < 10){
Beep = 0;
Delay1000us();
}else {
Beep = 1;
}
TL0 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0x00; //ЩшжУЖЈЪБГѕжЕ
}
return 0;
}
/*ЪЎНјжЦ2зѓвЦ1ЮЛ,БфГЩ20ЁЃЯрЕБгкГЫвд10
ЖўНћжЙ1зѓвЦ1ЮЛ,БфГЩ10(2)ЁЃЯрЕБгкГЫвд2,зѓвЦ8ЮЛ,ГЫвд2ЕФ8ДЮЗН=256;*/
ПЊИЧРЌЛјЭА
ЙІФмУшЪі
МьВтППНќЪБ,РЌЛјЭАздЖЏПЊИЧВЂАщЫцЕЮвЛЩљ,2УыКѓЙиИЧ
ЗЂЩње№ЖЏЪБ,РЌЛјЭАздЖЏПЊИЧВЂАщЫцЕЮвЛЩљ,2УыКѓЙиИЧ
гВМўЫЕУї
SG90ЖцЛњ,ГЌЩљВЈФЃПщ,е№ЖЏДЋИаЦї,ЗфУљЦї
НгЯпЫЕУї
ЖцЛњПижЦПк P1.1;
ГЌЩљВЈTrigНг P1.5 ,EchoНг P1.6 ;
ЗфУљЦїНг P1.2 Пк;
е№ЖЏДЋИаЦїНг P3.2`Пк(ЭтВПжаЖЯ0)
дДТы
#include <stdio.h>
#include <reg51.h>
#include<intrins.h>
sbit Trig = P1^5;
sbit Echo = P1^6;
sbit Vibrate = P3^2; //е№ЖЏДЋИаЦї,гае№ЖЏdoПкЗЂЫЭвЛИіЕЭЕчЦН
sbit sg90_com = P1^1;//ЖцЛњ
sbit Beep = P1^2;//ЗфУљЦї
int cnt = 0;
int jd = 0;
int mark_vibrate = 0; //е№ЖЏБъжОЮЛ
int jd_mark;
void Delay200us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 89;
while (--i);
}
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Delay200ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 2;
j = 103;
k = 147;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Timer1Init(void) //0ЮЂУы@11.0592MHz
{
AUXR &= 0xBF; //ЖЈЪБЦїЪБжг12TФЃЪН
TMOD &= 0x0F; //ЩшжУЖЈЪБЦїФЃЪН
TMOD |= 0x10; //ЩшжУЖЈЪБЦїФЃЪН
TL1 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TH1 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TF1 = 0; //ЧхГ§TF0БъжО
}
void Timer0Init(void) //500ЮЂУы@11.0592MHz
{
AUXR &= 0x7F; //ЖЈЪБЦїЪБжг12TФЃЪН
TMOD &= 0xF0; //ЩшжУЖЈЪБЦїФЃЪН
TMOD |= 0x01; //ЩшжУЖЈЪБЦїФЃЪН
TL0 = 0x33; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0xFE; //ЩшжУЖЈЪБГѕжЕ
TF0 = 0; //ЧхГ§TF0БъжО
TR0 = 1; //ЖЈЪБЦї0ПЊЪММЦЪБ
EA = 1; //ДђПЊзмжаЖЯ 1ПЊ 0Йи
ET0 = 1; //ДђПЊЖЈЪБЦї0жаЖЯ
}
void EX0_Init()
{
EX0 = 1;//ДђПЊЭтВПжаЖЯ,1ЮЊдЪаэ
IT0 = 0;//ЩшжУЭтВПжаЖЯЕФДЅЗЂФЃЪН,ЯТНЕбиЛђепЕЭЕчЦН,0ЮЊЕЭЕчЦН,1ЯТНЕби
}
void Beep_response()
{
Beep = 0;
Delay200ms();
Beep = 1;
}
void Init_SG90_0()
{
jd = 1;
cnt = 0;
sg90_com = 1;
}
void open_SG_90_90()
{
jd = 3;
if(jd_mark != jd){
cnt = 0;
Beep_response();
Delay2000ms();
}
jd_mark = jd;
}
void close_SG_90_0()
{
jd = 1;
cnt = 0;
jd_mark = jd;
Delay200ms();
}
void Trigger_signal() //ДЅЗЂаХКХ,ШУФЃПщФкВПЗЂВЈ
{
Trig = 0;
Delay200us();
Trig = 1;
Delay10us();
Trig = 0;
}
double GetDistance()
{
double time;
double dis;
TL1 = 0x00; //ЩшжУЖЈЪБГѕжЕ
TH1 = 0x00; //ЩшжУЖЈЪБГѕжЕ
Trigger_signal();
while(Echo == 0);
TR1 = 1; //ЖЈЪБЦї1ПЊЪММЦЪБ
while(Echo == 1);
TR1 = 0; //ЖЈЪБЦї0ЭЃжЙМЦЪБ
time = (TH1*256 + TL1)*1.085;//ЕЅЮЛЮЊus
dis = time*0.017; //етРяЛЛЫуЮЊРхУзСЫ
return dis;
}
int main()
{
double Distance;
Timer1Init();
Timer0Init();
EX0_Init();
Beep = 1;
Init_SG90_0();
while(1){
Distance = GetDistance();
if(Distance < 10 || mark_vibrate == 1){
open_SG_90_90();
mark_vibrate = 0;
} else{
close_SG_90_0();
}
}
return 0;
}
void Timer0_Handle() interrupt 1
{
cnt++;
TL0 = 0x33; //ЩшжУЖЈЪБГѕжЕ
TH0 = 0xFE; //ЩшжУЖЈЪБГѕжЕ
if(cnt < jd){
sg90_com = 1;
}else {
sg90_com = 0;
}
if(cnt == 40){
cnt = 0;
sg90_com = 1;
}
}
void EX0_Handle() interrupt 0
{
mark_vibrate = 1;
}
/*ЪЎНјжЦ2зѓвЦ1ЮЛ,БфГЩ20ЁЃЯрЕБгкГЫвд10
ЖўНћжЙ1зѓвЦ1ЮЛ,БфГЩ10(2)ЁЃЯрЕБгкГЫвд2,зѓвЦ8ЮЛ,ГЫвд2ЕФ8ДЮЗН=256;*/