
Ubuntu20.04下安装免费mujoco、mujoco_py、robosuite
前言
本文用于记录安装免费版的mujoco200,罗列一下安装过程中出现的问题,防止大伙踩坑。
要安装的东西:
- mujoco 200
- mujoco_py 2.0.2.13
- robosuite 1.3.0
安装mujoco
-
安装
- 打开终端,输入指令
mkdir ~/.mujoco,在home下新建隐藏文件夹 - 将下载的
mujoco200_linux.zip解压缩(默认在Download路径下) - 进入Home目录
Ctrl+H显示隐藏文件夹,将解压缩后的文件复制到.mujoco文件夹中,注意此时复制的文件名改为mujoco200(否则mujoco_py无法识别) - 复制
mjkey.txt文件将其分别放到.mujoco和.mujoco/jujoco200/bin目录下 - 添加环境变量,终端输入
sudo gedit ~/.bashrc,将下面两句加入最后,完成后记的输入source ~/.bashrc或打开新终端
export LD_LIBRARY_PATH=~/.mujoco/mujoco200/bin${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}} export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH} - 打开终端,输入指令
-
测试,终端输入指令
cd ~/.mujoco/mujoco200/bin ./simulate ../model/humanoid.xml -
出现如图表示mujoco安装成功

安装mojoco_py
注意mujoco_py的版本对应 目前官方已经更新到了mujoco_py 2.1,本文安装老版本。
-
使用pip安装(mujoco_py 2.0的最高版本)
pip install mujoco_py==2.0.2.13 -
测试是否安装成功
import mujoco_py import os mj_path, _ = mujoco_py.utils.discover_mujoco() xml_path = os.path.join(mj_path, 'model', 'humanoid.xml') model = mujoco_py.load_model_from_path(xml_path) sim = mujoco_py.MjSim(model) print(sim.data.qpos) sim.step() print(sim.data.qpos) -
若成功输出则安装成功,如果报gcc错误,使用以下指令解决(参考文章)
sudo apt-get update -q sudo DEBIAN_FRONTEND=noninteractive apt-get install -y curl libgl1-mesa-dev libgl1-mesa-glx libglew-dev libosmesa6-dev sudo apt-get clean sudo rm -rf /var/lib/apt/lists/* -
再次测试
安装robosuite
注意直接使用pip安装robosuite,会安装依赖free-mujoco-py,与上面安装冲突,因此使用离线安装
-
clone代码
git clone https://github.com/StanfordVL/robosuite.git cd robosuite -
在文件夹中找到文件
seyup.py,注释掉依赖项,如下图所示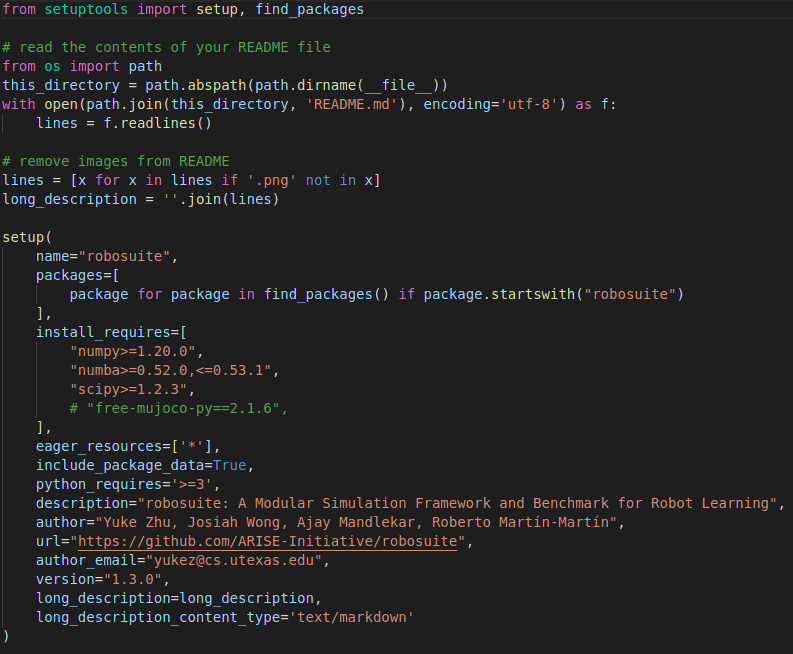
-
安装
pip3 install -r requirements.txt -
测试
python robosuite/demos/demo_random_action.py -
如果测试不显示,且报错下图
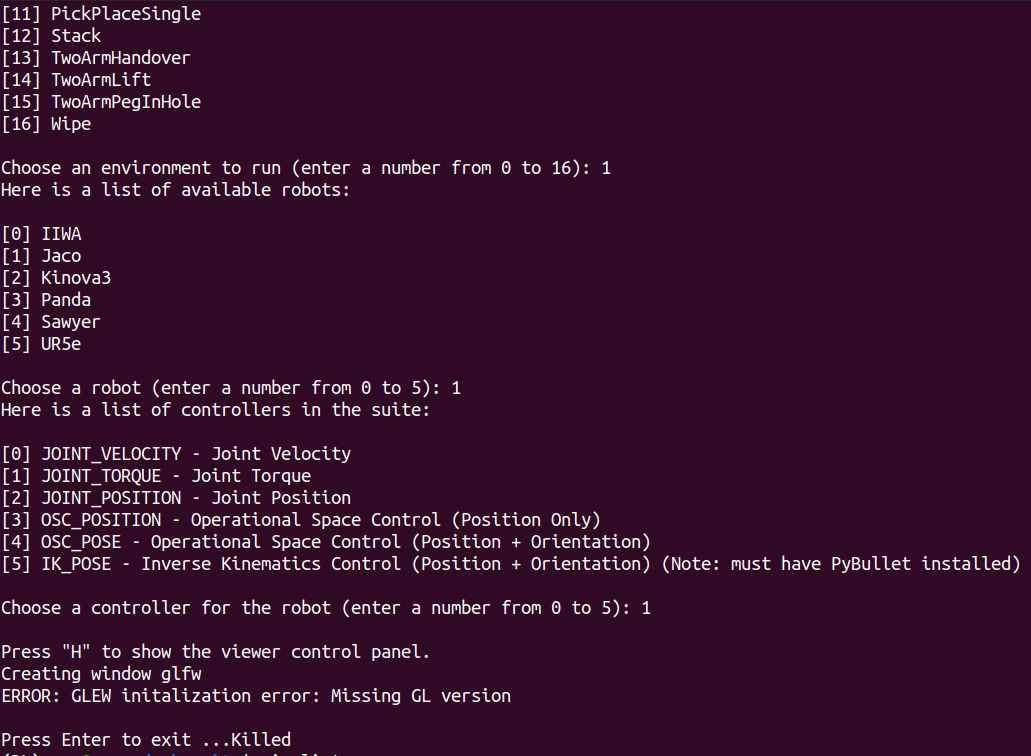
? 则执行以下指令
sudo gedit ~/.bashrc,最后一行加入,记得source ~/.bashrcexport LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so -
再次测试,成功
