视觉组第一次授课
一:GIT操作
1.创建自己的版本库
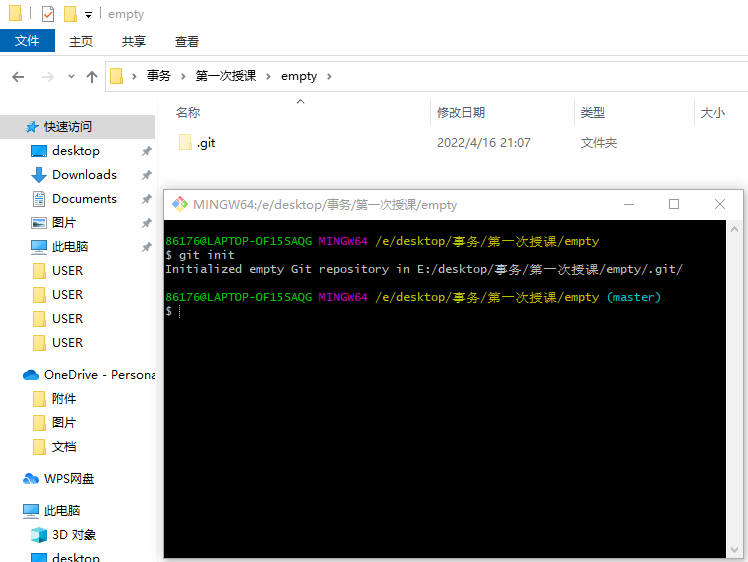
a.随意找一个合适的地方,创建一个空目录(空文件夹)
b.将该文件夹变成git仓库(出现了一个.git的目录,这个目录是Git来跟踪管理版本库的,没事千万不要手动修改这个目录里面的文件)
2.git基本操作流程
a.假设将自己的一个文件放入了刚刚创建的git仓库下
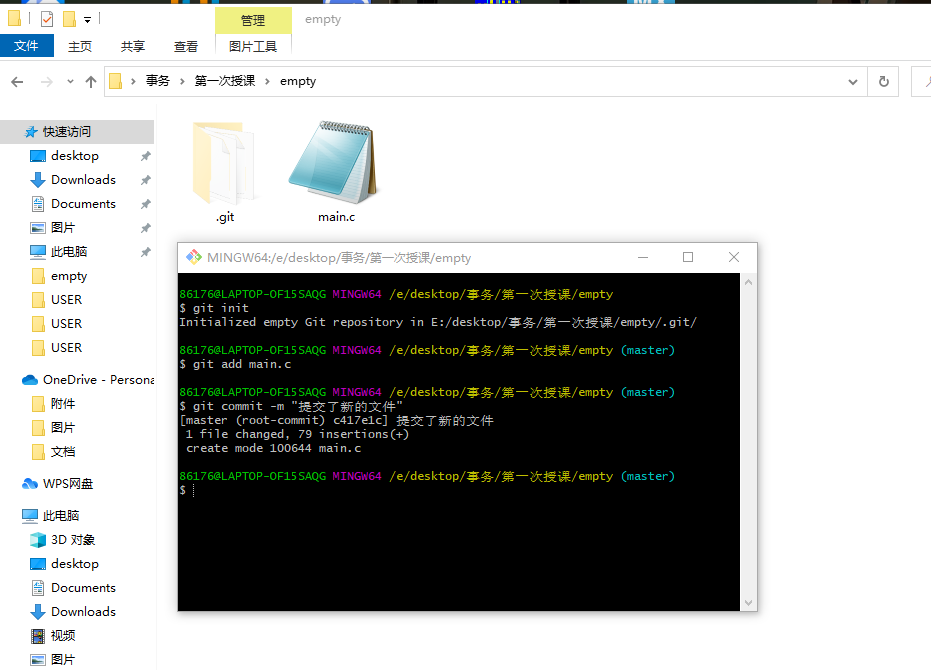
b.第一步,用命令git add告诉Git,把文件添加到仓库:
git add main.c
c.第二步,用命令git commit告诉Git,把文件提交到仓库:
git commit -m "提交了新的文件"
d.最终如下:
3.git分支操作
a.首先,我们创建dev分支,然后切换到dev分支:
git checkout -b dev
b.用git branch命令查看当前分支:
git branch
c.然后,我们就可以在dev分支上正常提交,此时先对main.c做个修改,再进行如下操作:
git add main.c
git commit -m "branch test"
d.此时我们再切换回master分支,并进行查看:
git checkout master
git branch
e.此时我们看到刚刚再dev分支上提交的修改未影响到master分支,如果要影响,则要进行合并
git merge dev
f.合并完成后,就可以放心地删除dev分支了
git branch -d dev
g.删除后,查看branch,就只剩下master分支了
git branch
4.git克隆操作
a.选择一个远程仓库地址
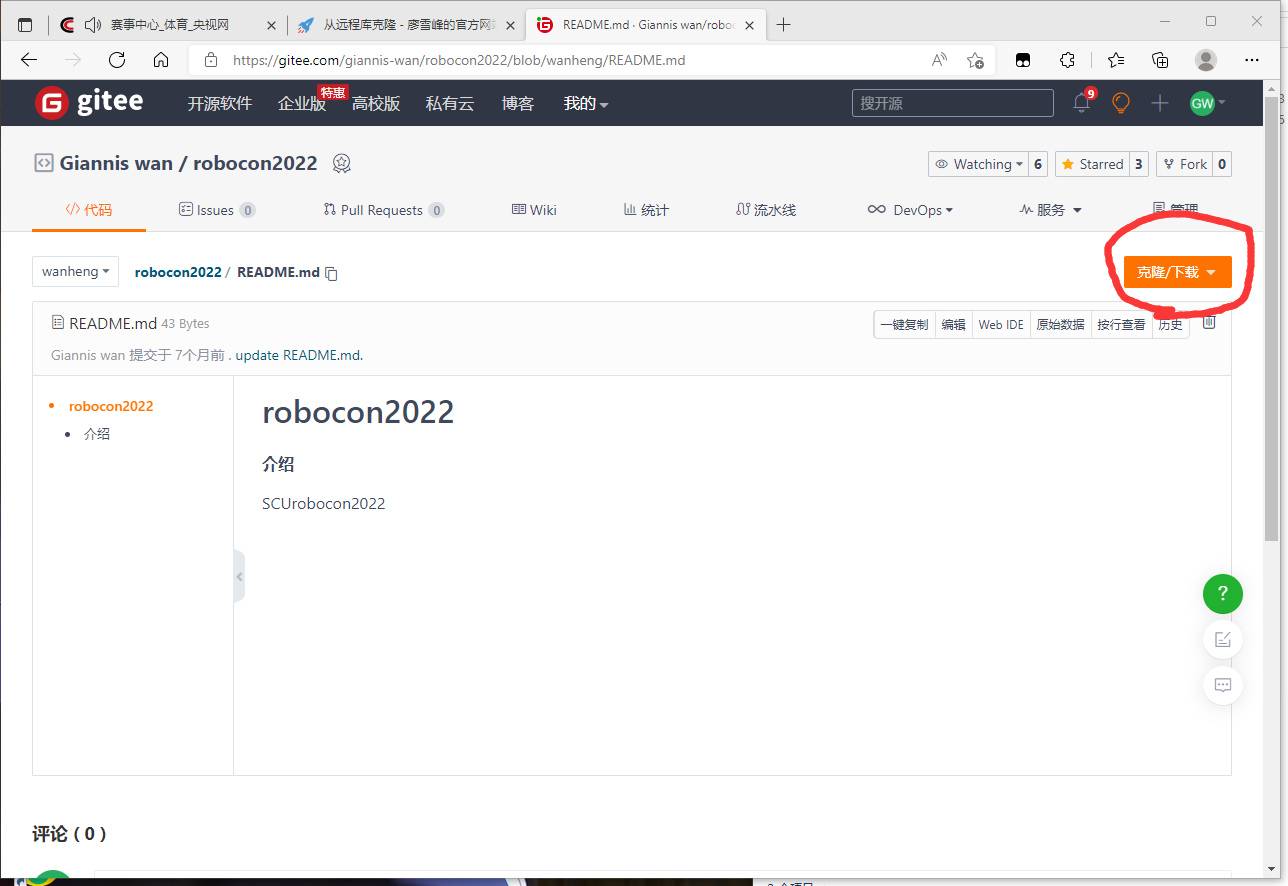
b.在空文件夹中执行
git clone git@gitee.com:giannis-wan/robocon2022.git
二:anaconda操作
1.换源
a.修改 .condarc文件
Windows 中,该文件的位置在:C:\Users(你的用户名).condarc
如果,没有该文件,应该是你没有选择查看隐藏项目,点击 查看,打开隐藏的项目栏;若还是没有,则自己创建一个**.condarc**文本文件,输入以下内容,然后删除文件后缀名即可.
show_channel_urls: true
ssl_verify: true
channels:
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/msys2/
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
- defaults
b.查看是否换源成功
conda config --show
2.虚拟环境
a.查看当前存在哪些虚拟环境
conda env list
b.检查更新当前conda
conda update conda
c.查看安装了哪些包
conda list
d.创建虚拟环境
conda create -n new_env python=3.8
e.激活虚拟环境
conda activate new_env
f.在虚拟环境下安装包
conda intall xxx
三:pycharm使用conda环境建立新工程
四:python串口
1.conda安装pyserial库,serial库
a.基于刚刚的教学,使用anaconda安装库
b.粘贴以下代码
import serial # python串口库
import serial.tools.list_ports
class Comcontrol(serial.Serial): # 定义串口控制类,继承串口类
def __init__(self, port, baudrate, bytesize, stopbits, timeout, parity): # 实例初始化
super(Comcontrol, self).__init__()
self.port = port
self.baudrate = baudrate
self.bytesize = bytesize
self.stopbits = stopbits
self.timeout = timeout
self.parity = parity
"""建立串口连接"""
"""设置串口参数:串口号,波特率,数据长度,停止位,延迟时间,校验位"""
self.com = serial.Serial(port=self.port,
baudrate=self.baudrate,
bytesize=self.bytesize,
stopbits=self.stopbits,
timeout=self.timeout,
parity=self.parity)
def light_com_connect(): # 连接激光串口
flag1 = False
while flag1 is False: # 没连接到激光模块串口则一直连接
port_list = list(serial.tools.list_ports.comports()) # 搜索可用串口
if len(port_list) == 0: # 没有可用串口
print("no useful COM\r\n")
else:
print("find com successful\r\n")
for i in range(0, len(port_list)):
port = port_list[i] # 提取使用串口字符串
port = str(port)
print("you use: ", port[0:5], "\r\n")
if port[0:5] == light_com_name:
light_ser = Comcontrol(port=light_com_name, # 激光串口实例化
baudrate=19200,
bytesize=8,
stopbits=1,
timeout=0.6,
parity='N')
flag1 = light_ser.com.is_open # 激光模块是否打开标志
if flag1:
print("light connection success\r\n")
return light_ser
else:
print("connection failed\r\n")
if __name__ == '__main__':
light_ser_try = light_com_connect()
ser.close()

