Eigen��һ����Դ��C++��,��Ҫ����֧�����Դ���,�����ʸ������,��ֵ����������ص��㷨��Eigen?Ŀǰ(2022-04-17)���µİ汾��3.4.0(������2021-08-18),����C++��������,����Ҫ�κ���������������Eigen������ص�ַΪ:https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip![]() https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip1. �����Windowsƽ̨������,������.zipѹ�����ļ�,��:
https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip1. �����Windowsƽ̨������,������.zipѹ�����ļ�,��:

?���غ��Ժ�,��ѹ����������ΪEigen3,����ѹ,�����ָ��λ��,��:E:\Codes_Program\Eigen3��
2. ��Visual Studio(VS)���½�һ����Ŀ,��������Դ���:
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace std;
Eigen::Matrix3d eulerAnglesToRotationMatrix(Eigen::Vector3d& theta);
bool isRotationMatirx(Eigen::Matrix3d R);
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d& R);
const double ARC_TO_DEG = 57.29577951308238;
const double DEG_TO_ARC = 0.0174532925199433;
int main()
{
// �趨����ŷ����(�Ƕ�),�ƹ̶���
double roll_deg = 0.5; // ��X��
double pitch_deg = 0.8; // ��Y��
double yaw_deg = 108.5; // ��Z��
// ת��Ϊ����
double roll_arc = roll_deg * DEG_TO_ARC; // ��X��
double pitch_arc = pitch_deg * DEG_TO_ARC; // ��Y��
double yaw_arc = yaw_deg * DEG_TO_ARC; // ��Z��
cout << endl;
cout << "roll_arc = " << roll_arc << endl;
cout << "pitch_arc = " << pitch_arc << endl;
cout << "yaw_arc = " << yaw_arc << endl;
// ��ʼ��ŷ����(rpy),��Ӧ��x��,��y��,��z�����ת�Ƕ�
Eigen::Vector3d euler_angle(roll_arc, pitch_arc, yaw_arc);
// ʹ��Eigen�⽫ŷ����ת��Ϊ��ת����
Eigen::Matrix3d rotation_matrix1, rotation_matrix2;
rotation_matrix1 = Eigen::AngleAxisd(euler_angle[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle[0], Eigen::Vector3d::UnitX());
cout << "nrotation matrix1 =n" << rotation_matrix1 << endl << endl;
// ʹ���Զ��庯����ŷ����ת��Ϊ��ת����
rotation_matrix2 = eulerAnglesToRotationMatrix(euler_angle);
cout << "rotation matrix2 =n" << rotation_matrix2 << endl << endl;
// ʹ��Eigen����ת����ת��Ϊŷ����
Eigen::Vector3d eulerAngle1 = rotation_matrix1.eulerAngles(2, 1, 0); // ZYX˳��,yaw,pitch,roll
cout << "roll_1 pitch_1 yaw_1 = " << eulerAngle1[2] << " " << eulerAngle1[1]
<< " " << eulerAngle1[0] << endl << endl;
// ʹ���Զ��庯������ת����ת��Ϊŷ����
Eigen::Vector3d eulerAngle2 = rotationMatrixToEulerAngles(rotation_matrix1); // roll,pitch,yaw
cout << "roll_2 pitch_2 yaw_2 = " << eulerAngle2[0] << " " << eulerAngle2[1]
<< " " << eulerAngle2[2] << endl << endl;
return 0;
}
Eigen::Matrix3d eulerAnglesToRotationMatrix(Eigen::Vector3d& theta)
{
Eigen::Matrix3d R_x; // ������ת�����X����
R_x <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0]);
Eigen::Matrix3d R_y; // ������ת�����Y����
R_y <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1]);
Eigen::Matrix3d R_z; // ������ת�����Z����
R_z <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1;
Eigen::Matrix3d R = R_z * R_y * R_x;
return R;
}
bool isRotationMatirx(Eigen::Matrix3d R)
{
double err = 1e-6;
Eigen::Matrix3d shouldIdenity;
shouldIdenity = R * R.transpose();
Eigen::Matrix3d I = Eigen::Matrix3d::Identity();
return (shouldIdenity - I).norm() < err;
}
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d& R)
{
assert(isRotationMatirx(R));
double sy = sqrt(R(0, 0) * R(0, 0) + R(1, 0) * R(1, 0));
bool singular = sy < 1e-6;
double x, y, z;
if (!singular)
{
x = atan2(R(2, 1), R(2, 2));
y = atan2(-R(2, 0), sy);
z = atan2(R(1, 0), R(0, 0));
}
else
{
x = atan2(-R(1, 2), R(1, 1));
y = atan2(-R(2, 0), sy);
z = 0;
}
return { x, y, z };
}
3. ���ε��:��ͼ �C> �������� �C> ���Թ�����

4. ����ѡ��:Debug | x64 -> VC++Ŀ¼ -> ����Ŀ¼,���ڰ���Ŀ¼������Eigen3�ļ��е�λ��,��:?E:\Codes_Program\Eigen3
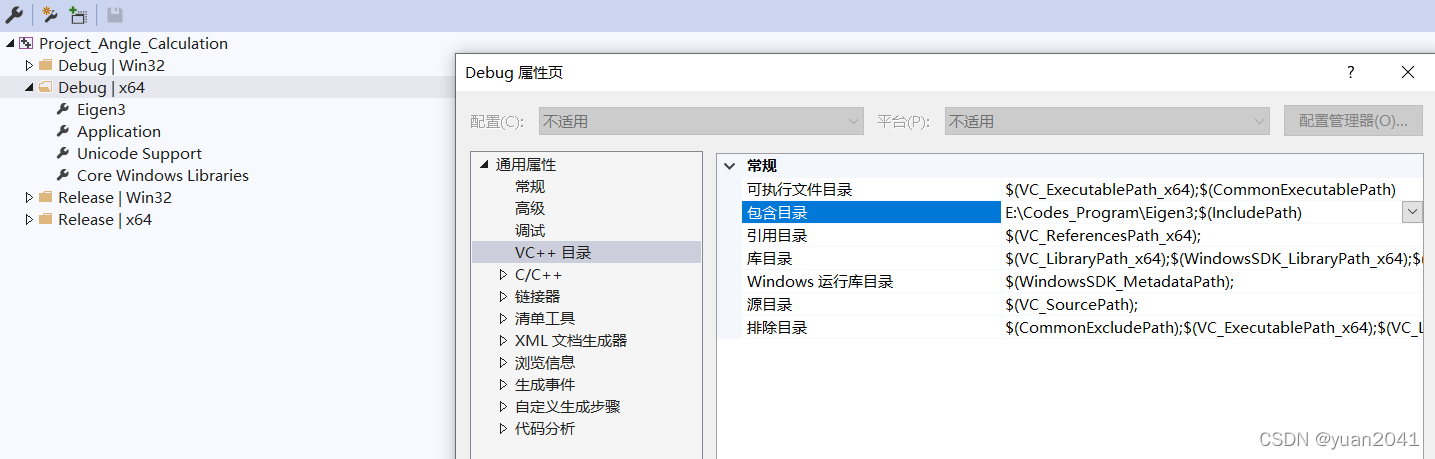
5. �ڹ���������:Debug��x64,����ʹ��Eigen�⡣
![]()

