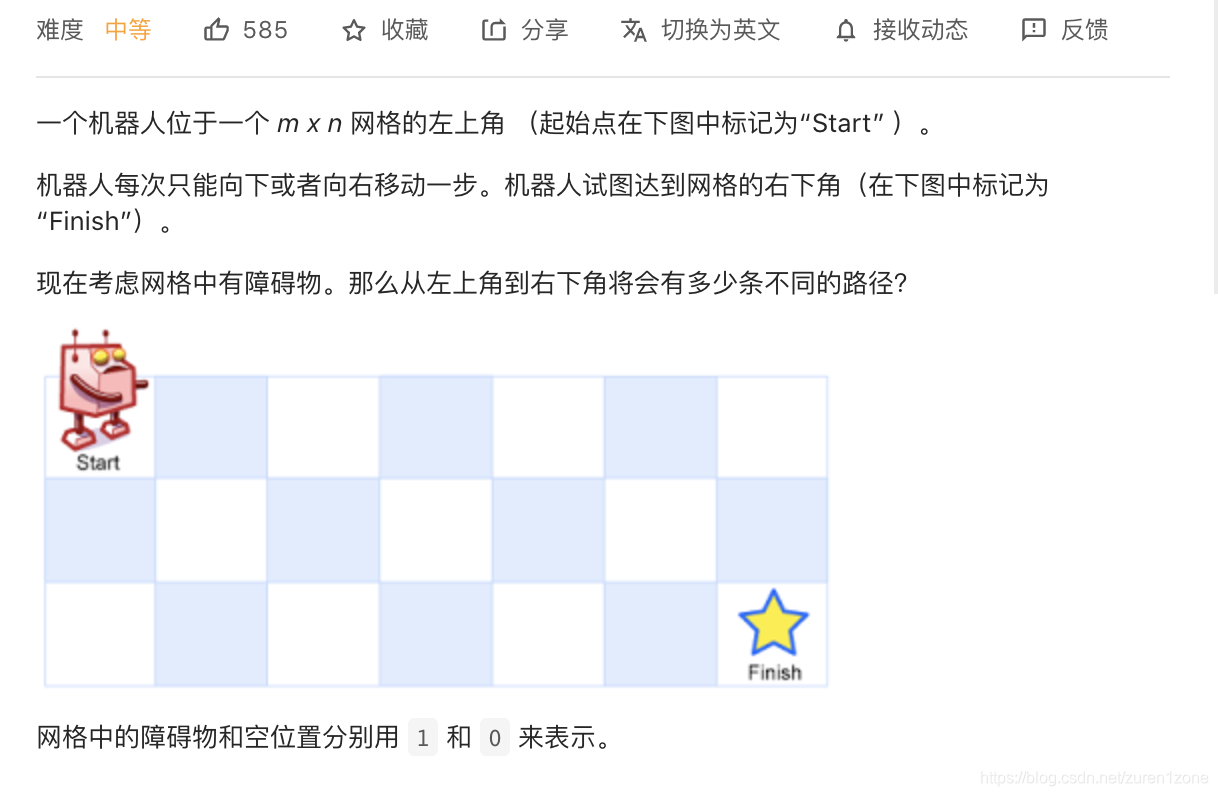
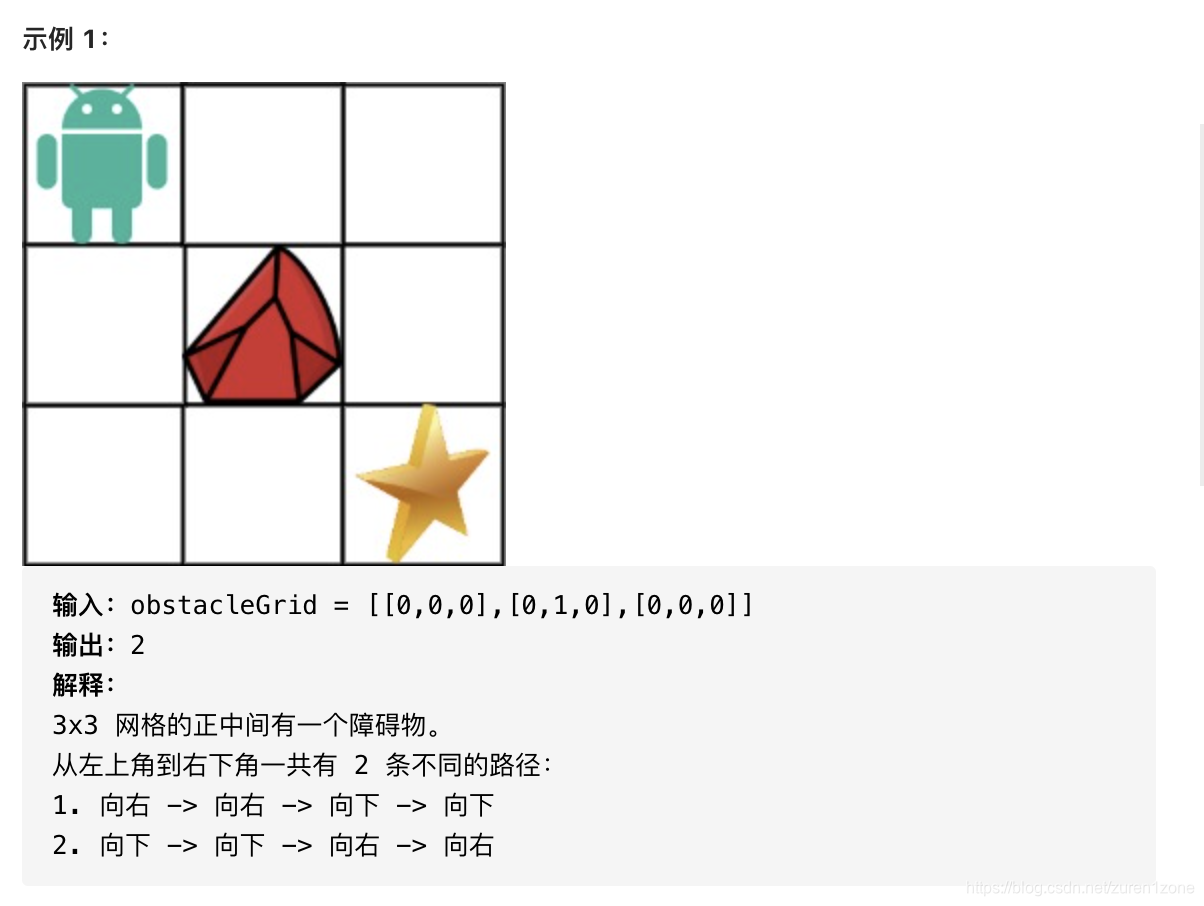
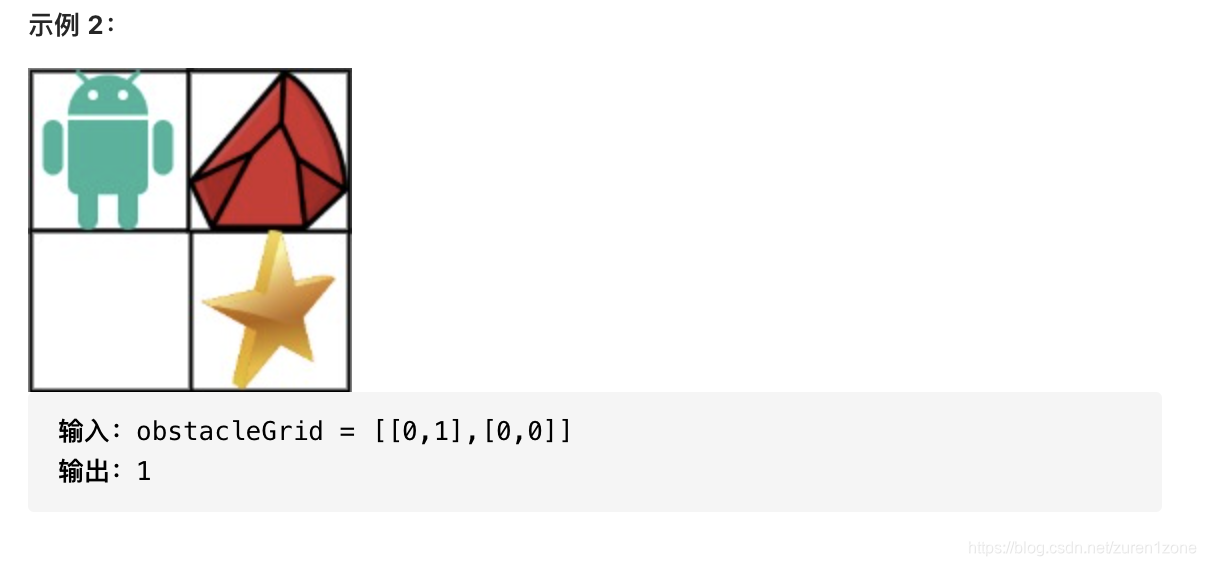
63 不同路径-02
动态规划
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int rows = obstacleGrid.length;
int colums = obstacleGrid[0].length;
int[][] f = new int[rows][colums];
for(int i=0;i<rows;i++){
Arrays.fill(f[i],0);
}
if(obstacleGrid[0][0]==0){
f[0][0] = 1;
}
for(int i=0;i<rows;i++){
for(int j=0;j<colums;j++){
if(i+1<rows && obstacleGrid[i+1][j]==0){
f[i+1][j]+=f[i][j];
}
if(j+1<colums && obstacleGrid[i][j+1]==0){
f[i][j+1] += f[i][j];
}
}
}
return f[rows-1][colums-1];
}
}

时间复杂度
O
(
m
n
)
O(mn)
O(mn)。
空间复杂度
O
(
m
n
)
O(mn)
O(mn)。
优化空间
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int rows = obstacleGrid.length;
int colums = obstacleGrid[0].length;
int[] f = new int[colums];
Arrays.fill(f,0);
// for(int i=0;i<rows;i++){
// Arrays.fill(f[i],0);
// }
if(obstacleGrid[0][0]==0){
f[0] = 1;
}
for(int i=0;i<rows;i++){
for(int j=0;j<colums;j++){
if(obstacleGrid[i][j]!=0){
f[j] = 0;
continue;
}
// if(i+1<rows && obstacleGrid[i+1][j]!=0){
// f[j] = 0;
// }
if(j+1<colums && obstacleGrid[i][j+1]==0){
f[j+1] += f[j];
}
}
}
return f[colums-1];
}
}

时间复杂度
O
(
m
n
)
O(mn)
O(mn)。
空间复杂度
O
(
n
)
O(n)
O(n)。