1 粒子群算法
模型参考这里。
3 代码
%% 粒子群
clc;
close all
clear
load('data4.mat')
figure(1)%画障碍图
hold on
S=(S_coo(2)-0.5)*num_shange+(S_coo(1)+0.5);%起点对应的编号
E=(E_coo(2)-0.5)*num_shange+(E_coo(1)+0.5);%终点对应的编号
for i=1:num_shange
? ?for j=1:num_shange
? ? ? ?if sign(i,j)==1
? ? ? ? ? ?y=[i-1,i-1,i,i];
? ? ? ? ? ?x=[j-1,j,j,j-1];
? ? ? ? ? ?h=fill(x,y,'k');
? ? ? ? ? ?set(h,'facealpha',0.5)
? ? ? ?end
? ? ? ?s=(num2str((i-1)*num_shange+j));
? ? ? ?%text(j-0.95,i-0.5,s,'fontsize',6)
? ?end
end
axis([0 num_shange 0 num_shange])%限制图的边界
plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点
plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点
set(gca,'YDir','reverse');%图像翻转
for i=1:num_shange
? ?plot([0 num_shange],[i-1 i-1],'k-');
? ?plot([i i],[0 num_shange],'k-');%画网格线
end
PopSize=20;%种群大小
OldBestFitness=0;%旧的最优适应度值
gen=0;%迭代次数
maxgen =100;%最大迭代次数
k1 = 1;%交叉1
k3 = 1;%交叉2
% c1=0.5;%交叉概率
Pm=0.7;%变异概率
c1=0.5;%认知系数
c2=0.7;%社会学习系数
w=0.96;%惯性系数
w_min=0.5;
w_max=1;
%%
%初始化路径
?
?
%最优解
index1=find(best_route==E);
route_lin=best_route(1:index1);
for i=2:index1
? ?Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
? ?Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
? ?plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)
end
title('粒子群-遗传算法-对比路线');
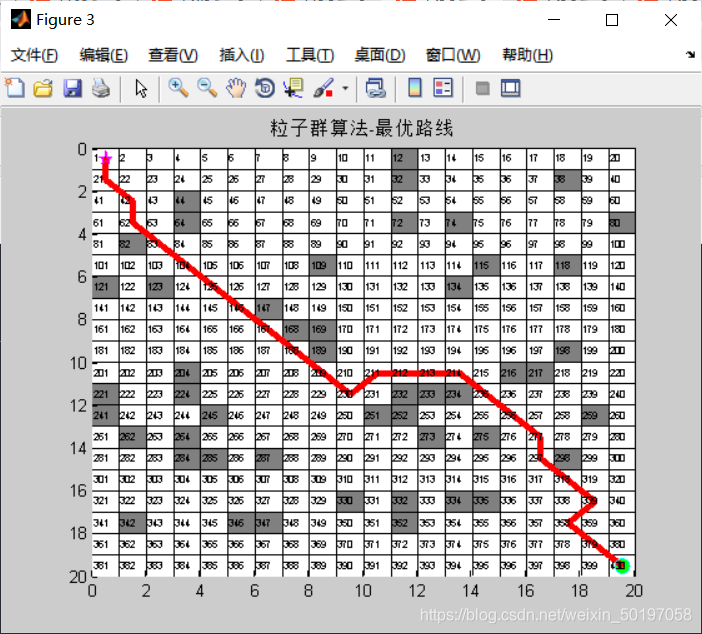
figure(3)
hold on
for i=1:num_shange
? ?for j=1:num_shange
? ? ? ?if sign(i,j)==1
? ? ? ? ? ?y=[i-1,i-1,i,i];
? ? ? ? ? ?x=[j-1,j,j,j-1];
? ? ? ? ? ?h=fill(x,y,'k');
? ? ? ? ? ?set(h,'facealpha',0.5)
? ? ? ?end
? ? ? ?s=(num2str((i-1)*num_shange+j));
? ? ? ?text(j-0.95,i-0.5,s,'fontsize',6)
? ?end
end
axis([0 num_shange 0 num_shange])%限制图的边界
plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点
plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点
set(gca,'YDir','reverse');%图像翻转
for i=1:num_shange
? ?plot([0 num_shange],[i-1 i-1],'k-');
? ?plot([i i],[0 num_shange],'k-');%画网格线
end
for i=2:index1
? ?Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5];
? ?Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5];
? ?plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)
end
title('粒子群-遗传算法-最优路线');
?
?
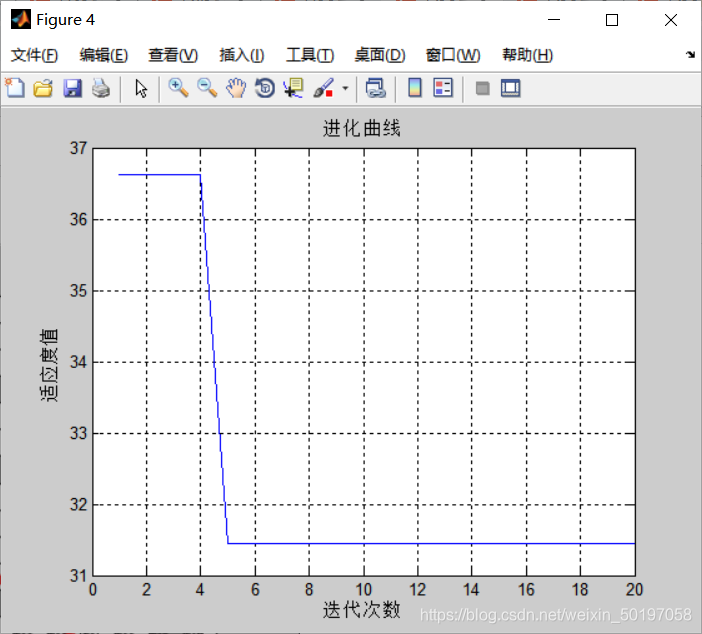
%进化曲线
figure(4);
plot(BestFitness);
xlabel('迭代次数')
ylabel('适应度值')
grid on;
title('粒子群-遗传算法-进化曲线');
disp('粒子群-遗传算法-最优路线方案:')
disp(num2str(route_lin))
disp(['起点到终点的距离:',num2str(BestFitness(end))]);
![]()
4 部分代码
![]()
![]()
5 参考文献
[1]邓高峰, 张雪萍, and 刘彦萍. "一种障碍环境下机器人路径规划的蚁群粒子群算法." 控制理论与应用 26.008(2009):879-883.