基本概念
- 散列是一种用于以常数平均时间执行插入、删除、和查找的技术,通过关键字key,经由哈希函数,映射到值val的存储地址。
- 装载因子:散列表中元素个数 除以 散列表的大小。是表示 Hsah 表中元素的填满的程度,若加载因子越大,则填满的元素越多,这样的好处是:空间利用率高了,但冲突的机会加大了。反之,加载因子越小,填满的元素越少,好处是冲突的机会减小了,但空间浪费多了。
- 散列冲突:两个不同的key映射到了同一个值的时候。
- 素数:只能被1和自身整除的数(如 2 n ? 1 2^{n}-1 2n?1或者 2 n + 1 2^{n}+1 2n+1 )
解决散列冲突
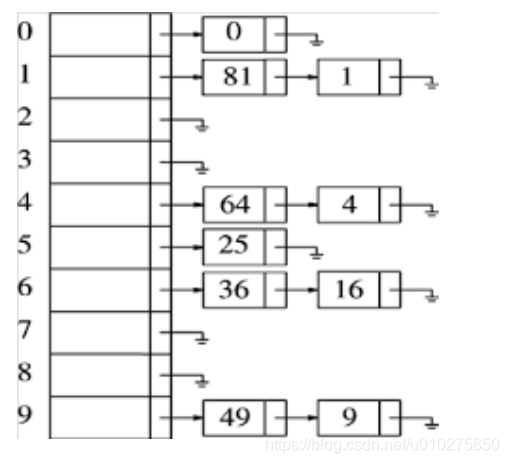
开散列(拉链法)
分离链接(Separate chaining)
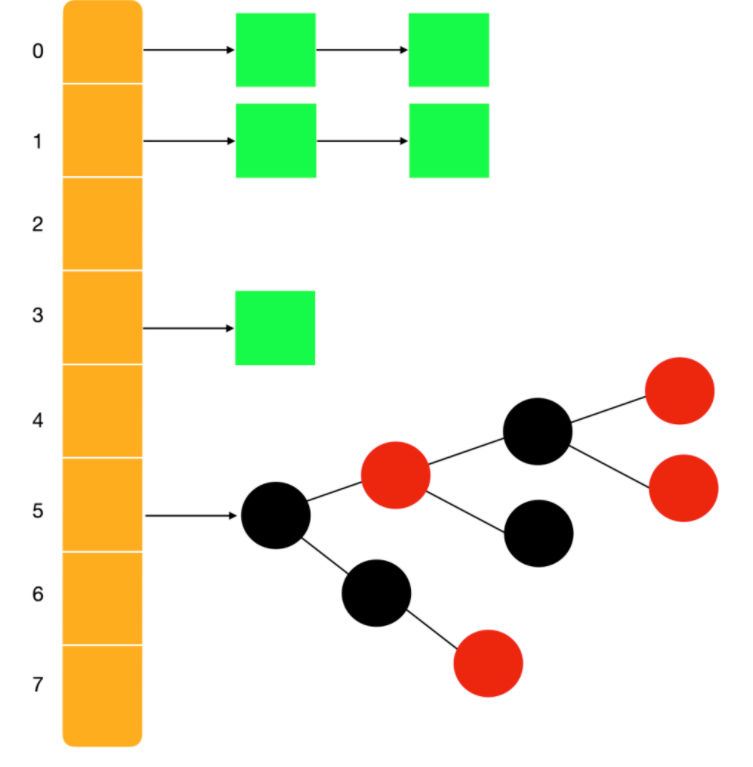
如果链表过长,会导致查找效率低下,此时就可以使用红黑树替代链表。
优点:
- 无需为每个桶预留多个槽位
- 可解决任意多次冲突
- 删除操作简单、统一
缺点:
- 指针需要额外空间
- 节点需要动态申请,存在开销
- 空间未必连续分布,容易造成内存碎片
开放寻址法(闭散列)
- (一次项的线性)线性探测(Linear probing)
- (添加了一个二次项)二次探查
- 双重哈希(Double hashing)
实现方式
- 数组 + [链表 / 红黑树]
一般预留的哈希表大小为一个素数空间(大于所要填充的数量),避免哈希冲突。
可以通过设置装填因子(如0.75),从而保持着一定的预留空间,当达到装填因子的填充比例时,便动态调整数组的大小(类比与vector的实现),降低哈希冲突概率。
STL无序容器实现原理:
采用的开链法,其中,Pi 表示存储的各个键值对。
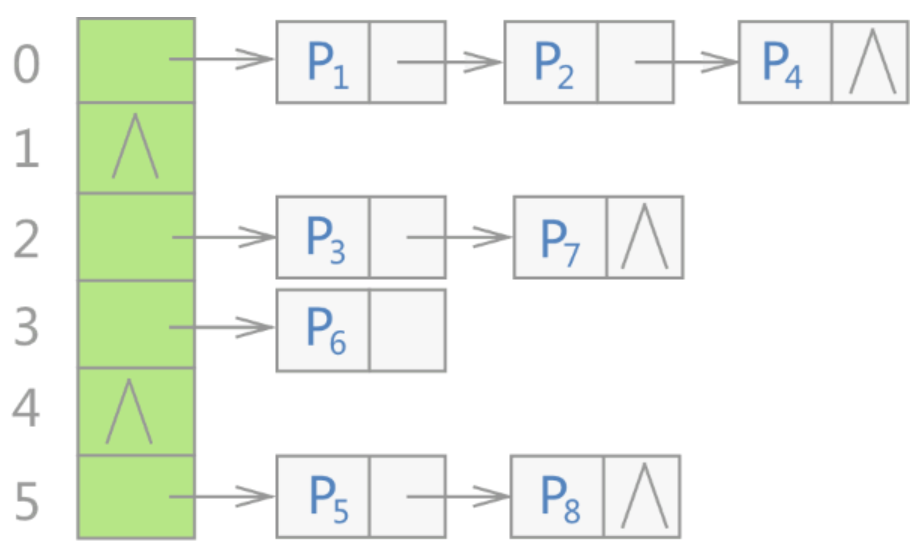
可以看到,当使用无序容器存储键值对时,会先申请一整块连续的存储空间,但此空间并不用来直接存储键值对,而是存储各个链表的头指针,各键值对真正的存储位置是各个链表的节点。
注意,STL 标准库通常选用 vector 容器存储各个链表的头指针。
不仅如此,在 C++ STL 标准库中,将图中的各个链表称为桶(bucket),每个桶都有自己的编号(从 0 开始)。当有新键值对存储到无序容器中时,整个存储过程分为如下几步:
- 将该键值对中键的值带入设计好的哈希函数,会得到一个哈希值(一个整数,用 H 表示);
- 将 H 和无序容器拥有桶的数量 n 做整除取余运算(即 H % n),该结果即表示应将此键值对存储到的桶的编号;
- 建立一个新节点存储此键值对,同时将该节点链接到相应编号的桶上。