ЮФеТФПТМ
вЛЁЂЪЕбщШЮЮёгыФкШн
РћгУVC++БраДвЛИі3*3ЕФОљжЕТЫВЈЛђжажЕТЫВЈГЬађ
(1)ВЩгУВЮЪ§ДЋЕнЗНЪН,ВЂгУвЛИіБфСПЪфГідЫЫуНсЙћ
(2)вЊгаЫЕУїВПЗж,ЫЕУїЪфШыВЮЪ§ЕФИёЪН,ЫЕУїЪфГіЪ§ОнЗНЪН
(3)НЋТЫВЈКѓЕФНсЙћгУЮФМўБЃДцЯТРД,УќУћЮЊNoise_result.tif
ЖўЁЂЪЕбщдРэ
2.1 ОљжЕТЫВЈ
дквЃИаЭМЯёЩЯбЁдёвЛИі3ЁС3ЕФОиеѓ,ШчЯТЪНЫљЪО:
[
a
1
a
2
a
3
b
1
b
2
b
3
c
1
c
2
c
3
]
\left[\begin {matrix} a_1&a_2&a_3\\ b_1&b_2&b_3\\ c_1&c_2&c_3 \end{matrix}\right]
???a1?b1?c1??a2?b2?c2??a3?b3?c3?????
Сю:
b
2
=
m
e
a
n
{
a
1
+
a
2
+
a
3
+
b
1
+
b
2
+
b
3
+
c
1
+
c
2
+
c
3
}
b_2=mean\{a_1+a_2+a_3+b_1+b_2+b_3+c_1+c_2+c_3\}
b2?=mean{a1?+a2?+a3?+b1?+b2?+b3?+c1?+c2?+c3?}
БщРњгАЯёЫљгаЕФ3*3згеѓ,МДНјааСЫОљжЕТЫВЈ
2.2 жажЕТЫВЈ
дквЃИаЭМЯёЩЯбЁдёвЛИі3ЁС3ЕФОиеѓ,ШчЯТЪНЫљЪО:
[
a
1
a
2
a
3
b
1
b
2
b
3
c
1
c
2
c
3
]
\left[\begin {matrix}a_1&a_2&a_3\\b_1&b_2&b_3\\c_1&c_2&c_3\end{matrix}\right]
???a1?b1?c1??a2?b2?c2??a3?b3?c3?????
НЋ9ИідЊЫиАДДгДѓЕНаЁЛђепДгаЁЕНДѓХХСа:
[
x
1
,
x
2
,
x
3
,
x
4
,
x
5
,
x
6
,
x
7
,
x
8
,
x
9
]
=
s
o
r
t
(
a
1
,
a
2
,
a
3
,
b
1
,
b
2
,
b
3
,
c
1
,
c
2
,
c
3
)
[x_1,x_2,x_3,x_4,x_5,x_6,x_7,x_8,x_9]=sort(a_1,a_2,a_3,b_1,b_2,b_3,c_1,c_2,c_3)
[x1?,x2?,x3?,x4?,x5?,x6?,x7?,x8?,x9?]=sort(a1?,a2?,a3?,b1?,b2?,b3?,c1?,c2?,c3?)
Сю:
b
2
=
x
5
b_2=x_5
b2?=x5?
БщРњгАЯёЕФЫљга3*3згеѓ,МДНјааСЫжажЕТЫВЈ
Ш§ЁЂБрГЬЫМТЗ
ЪзЯШДДНЈFilterРр,ЦфКЌгаЮхИіЫНгазжЖЮ,ЗжБ№ЮЊ:Dataset,гУгкДцДЂЖСШыЕФЭМЯёЪ§ОнМЏ;XsizeЁЂYsizeЁЂBandnumЁЂdataType,ЗжБ№гУгкДЂДцЖСШыЭМЯёЕФСаЪ§ЁЂааЪ§ЁЂВЈЖЮЪ§КЭЪ§ОнРраЭЁЃ
private:
GDALDataset* Dataset;
int Xsize;
int Ysize;
int Bandnum;
GDALDataType dataType;
ШЛКѓДДНЈЙЋгаЕФЙЙдьКЏЪ§КЭЮіЙЙКЏЪ§,ЙЙдьКЏЪ§жаДЋШыжИЯђЭМЯёТЗОЖЕФзжЗћжИеы,БугкЭЈЙ§GDALПтЖСШЁЭМЯёЁЃ
public:
Filter(const char*);
~Filter();
ШЛКѓДДНЈЙЋгаЕФЗНЗЈMeanFilterКЭMedianFilter,ВЂДЋШыжИЯђБЃДцТЗОЖЕФзжЗћжИеы,БугкЭЈЙ§GDALПтБЃДцЭМЯё
void MeanFilter(const char*) const;
void MedianFilter(const char*) const;
вджажЕТЫВЈЮЊР§,ЪзЯШДДНЈСНИіЪ§зщ,гУгкДЂДцЖСШыЕФгАЯёЪ§ОнКЭДІРэКѓЕФгАЯёЪ§Он:
unsigned char* OldBuf = new unsigned char[Xsize * Ysize * dataType];
unsigned char* NewBuf = new unsigned char[Xsize * Ysize * dataType];
ШЛКѓНЋгУGDALЖСШыЕФЪ§ОнДцШыOldBufжа:
GDALRasterBand* band1 = Dataset->GetRasterBand(1);
band1->RasterIO(GF_Read, 0, 0, Xsize, Ysize, OldBuf, Xsize, Ysize, dataType, 0, 0);
гЩгкЪЙгУЕФЪЧД§ДІРэЯёдЊЕФАЫСкгђ,ЫљвдзюЭтШІЕФЯёдЊВЛзіДІРэ,жБНгИДжЦЕНNewBufжаШЅ:
for(int i = 0; i < this->Ysize; i++) {
for(int j = 0; j < this->Xsize; j++) {
if(i == 0 || j == 0 || i == Ysize - 1 || j == Xsize - 1) {
//гАЯёжаЕкiааЕкjСаЕФЯёЫидквЛЮЌЪ§зщжаЕФЫїв§ЪЧXsize*(i-1)+j
NewBuf[Xsize * (i - 1) + j] = OldBuf[Xsize * (i - 1) + j];
}
}
}
ДДНЈвЛИіГЄЖШЮЊ9ЕФвЛЮЌЪ§зщгУгкДЂДцД§ДІРэЯёдЊМАЦфАЫСкгђЕФЯёЫижЕ:
int temp[9] = { 0 };//3*3ЕФ
БщРњГ§зюЭтШІЯёдЊвдЭтЕФЫљгаЯёдЊ,НЋД§ДІРэЯёдЊЕФDNжЕгыЦфАЫСкгђЕФDNжЕДцШыtempЪ§зщ,дйНЋЪ§зщХХађ,ШЁЪ§зщзюжаМфЕФжЕ,МД *(temp+4),НЋЦфИГжЕИјД§ДІРэЯёдЊ,МДЭъГЩСЫжажЕТЫВЈЁЃШєНЋDNжЕДцШыЪ§зщКѓ,НЋЪ§зщдЊЫиЕФЦНОљжЕИГжЕИјД§ДІРэЯёдЊ,дђЭъГЩСЫОљжЕТЫВЈЁЃ
for(int i = 1; i < this->Ysize - 1; i++) {
for(int j = 1; j < this->Xsize - 1; j++) {
for(int k = 0; k < 9; k++) {
*(temp + k) = OldBuf[Xsize * (i + (k / 3 - 1)) + j + k % 3 - 1];
}
sort(temp, temp + 9);
NewBuf[Xsize * i + j] = (unsigned char)*(temp + 4);
}
}
зюКѓНЋТЫВЈКѓЕФгАЯёБЃДцМДПЩЁЃ
ЪЙгУЗНЗЈ:ЪзЯШвЊзЂВсGDAL,ШЛКѓДДНЈFilterРрЕФЪЕР§,дйЕїгУЗНЗЈМДПЩ:
int main() {
GDALAllRegister();
const char* imagepath = ".\\image\\nosieImg.tif";
const char* savepath = ".\\image\\Nosie_result1.tif";
Filter *filter=new Filter(imagepath);
filter->MeanFilter(savepath);
//filter->MedianFilter(savepath);
delete filter;
return 0;
}
ЫФЁЂаЇЙћеЙЪО
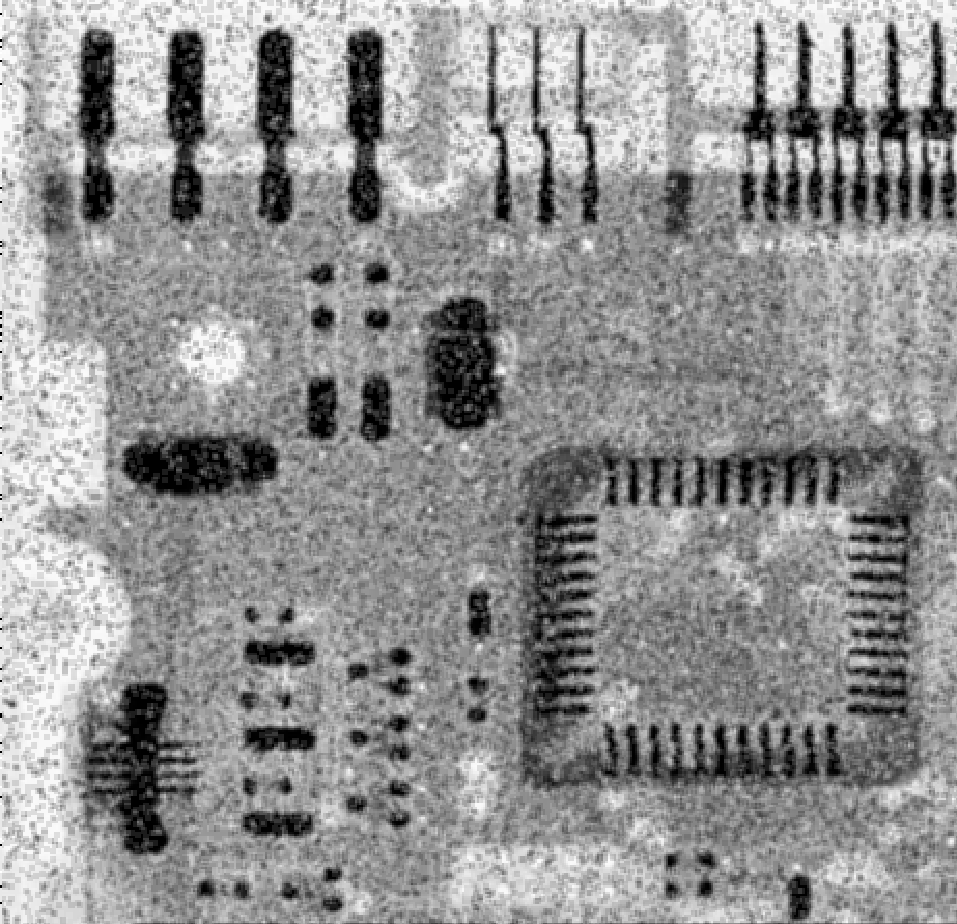
ТЫВЈЧАЕФгАЯё:

жажЕТЫВЈКѓЕФгАЯё:
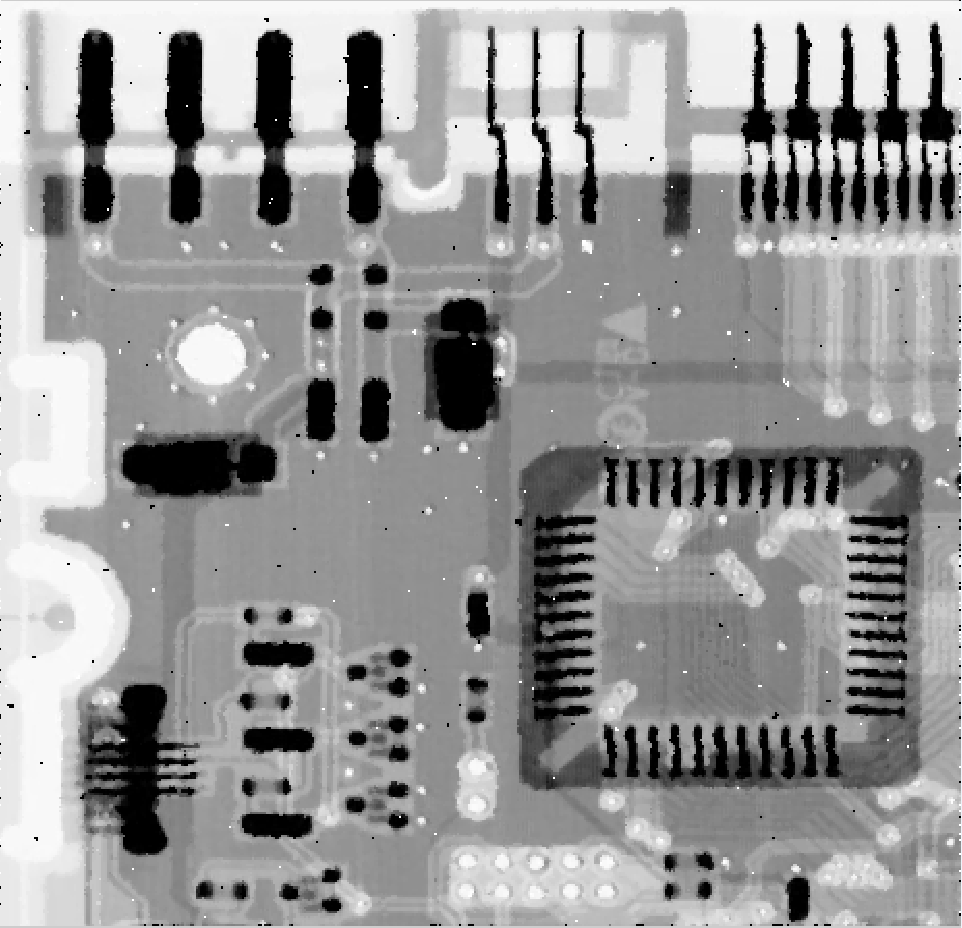 ОљжЕТЫВЈКѓЕФгАЯё:
ОљжЕТЫВЈКѓЕФгАЯё:
ЮхЁЂдДДњТы
Filter.h
#pragma once
#include<iostream>
#include<gdal_priv.h>
#include<gdal.h>
using namespace std;
class Filter {
private:
GDALDataset* Dataset;
int Xsize;
int Ysize;
int Bandnum;
GDALDataType dataType;
public:
Filter(const char*);
~Filter();
int getXsize() const;
int getBandnum() const;
void MeanFilter(const char*) const;
void MedianFilter(const char*) const;
};
Filter.cpp
#include "Filter.h"
#include<iostream>
#include<gdal_priv.h>
#include<gdal.h>
#include<assert.h>
#include<algorithm>
using namespace std;
Filter::Filter(const char* path) {
this->Dataset = (GDALDataset*)GDALOpen(path, GA_ReadOnly);
this->Xsize = Dataset->GetRasterXSize();
this->Ysize = Dataset->GetRasterYSize();
this->Bandnum = Dataset->GetRasterCount();
this->dataType = Dataset->GetRasterBand(1)->GetRasterDataType();
}
Filter::~Filter() {}
int Filter::getXsize() const {
return this->Xsize;
}
int Filter::getBandnum() const {
return this->Bandnum;
}
void Filter::MeanFilter(const char* savepath) const {
unsigned char* OldBuf = new unsigned char[Xsize * Ysize * dataType];
unsigned char* NewBuf = new unsigned char[Xsize * Ysize * dataType];
GDALRasterBand* band1 = Dataset->GetRasterBand(1);
band1->RasterIO(GF_Read, 0, 0, Xsize, Ysize, OldBuf, Xsize, Ysize, dataType, 0, 0);
//ЭтЮЇЕФвЛШІВЛаоИФ,ЫљвджБНгИГжЕЙ§ШЅ
for(int i = 0; i < this->Ysize; i++) {
for(int j = 0; j < this->Xsize; j++) {
if(i == 0 || j == 0 || i == Ysize - 1 || j == Xsize - 1) {
//гАЯёжаЕкiааЕкjСаЕФЯёЫидквЛЮЌЪ§зщжаЕФЫїв§ЪЧXsize*(i-1)+j
NewBuf[Xsize * (i - 1) + j] = OldBuf[Xsize * (i - 1) + j];
}
}
}
/*ОљжЕТЫВЈЪЕЯж*/
int temp[9] = { 0 };//3*3ЕФ
for(int i = 1; i < this->Ysize - 1; i++) {
for(int j = 1; j < this->Xsize - 1; j++) {
for(int k = 0; k < 9; k++) {
*(temp + k) = OldBuf[Xsize * (i + (k / 3 - 1)) + j + k % 3 - 1];
}
int sum = 0;
for(int t = 0; t < 9; t++) {
sum += *(temp + t);
}
NewBuf[Xsize * i + j] = sum / 9;
}
}
/*БЃДцТЫВЈжЎКѓЕФгАЯё*/
GDALDriver* Driver = GetGDALDriverManager()->GetDriverByName("GTiff");
int BandMap[1] = { 1 };
char** papszOption = nullptr;
papszOption = CSLSetNameValue(papszOption, "INTERLEAVE", "BAND");
GDALDataset* saveDataset = Driver->Create(savepath, this->Xsize, this->Ysize, this->Bandnum, this->dataType, papszOption);
if(!saveDataset) {
assert(!saveDataset);
}
saveDataset->RasterIO(GF_Write, 0, 0, this->Xsize, this->Ysize, NewBuf, this->Xsize, this->Ysize, this->dataType, this->Bandnum, BandMap, 0, 0, 0);
GDALClose(Dataset);
GDALClose(saveDataset);
}
void Filter::MedianFilter(const char* savepath) const {
unsigned char* OldBuf = new unsigned char[Xsize * Ysize * dataType];
unsigned char* NewBuf = new unsigned char[Xsize * Ysize * dataType];
GDALRasterBand* band1 = Dataset->GetRasterBand(1);
band1->RasterIO(GF_Read, 0, 0, Xsize, Ysize, OldBuf, Xsize, Ysize, dataType, 0, 0);
//ЭтЮЇЕФвЛШІВЛаоИФ,ЫљвджБНгИГжЕЙ§ШЅ
for(int i = 0; i < this->Ysize; i++) {
for(int j = 0; j < this->Xsize; j++) {
if(i == 0 || j == 0 || i == Ysize - 1 || j == Xsize - 1) {
//гАЯёжаЕкiааЕкjСаЕФЯёЫидквЛЮЌЪ§зщжаЕФЫїв§ЪЧXsize*(i-1)+j
NewBuf[Xsize * (i - 1) + j] = OldBuf[Xsize * (i - 1) + j];
}
}
}
/*жажЕТЫВЈЪЕЯж*/
int temp[9] = { 0 };//3*3ЕФ
for(int i = 1; i < this->Ysize - 1; i++) {
for(int j = 1; j < this->Xsize - 1; j++) {
for(int k = 0; k < 9; k++) {
*(temp + k) = OldBuf[Xsize * (i + (k / 3 - 1)) + j + k % 3 - 1];
}
sort(temp, temp + 9);
NewBuf[Xsize * i + j] = (unsigned char)*(temp + 4);
}
}
/*БЃДцТЫВЈжЎКѓЕФгАЯё*/
GDALDriver* Driver = GetGDALDriverManager()->GetDriverByName("GTiff");
int BandMap[1] = { 1 };
char** papszOption = nullptr;
papszOption = CSLSetNameValue(papszOption, "INTERLEAVE", "BAND");
GDALDataset* saveDataset = Driver->Create(savepath, this->Xsize, this->Ysize, this->Bandnum, this->dataType, papszOption);
if(!saveDataset) {
assert(!saveDataset);
}
saveDataset->RasterIO(GF_Write, 0, 0, this->Xsize, this->Ysize, NewBuf, this->Xsize, this->Ysize, this->dataType, this->Bandnum, BandMap, 0, 0, 0);
GDALClose(Dataset);
GDALClose(saveDataset);
}
main.cpp
#include<gdal_priv.h>
#include<gdal.h>
#include<iostream>
#include"Filter.h"
using namespace std;
int main() {
GDALAllRegister();
const char* imagepath = ".\\image\\nosieImg.tif";
const char* savepath = ".\\image\\Nosie_result1.tif";
Filter *filter=new Filter(imagepath);
//filter->MeanFilter(savepath);
filter->MedianFilter(savepath);
delete filter;
return 0;
}