
思路
一个函数可以将一个范围内的数(本题为10-9~109)映射到另一个范围内(本题为0 ~ 105)之间的一个数,被称为哈希函数。
- 哈希函数的写法: x mod 105;
x取余后必然会在 0 ~ 105之间。 - 冲突
可能会将若干不一样的数,映射到同一个数,(x范围大,值域范围小)大概率会发生冲突,如假设对12取余h[2] = 2, h[14] = 2;
开放寻址法和拉链法为对冲突的两种处理方法。
离散化是一种特殊的哈希方式
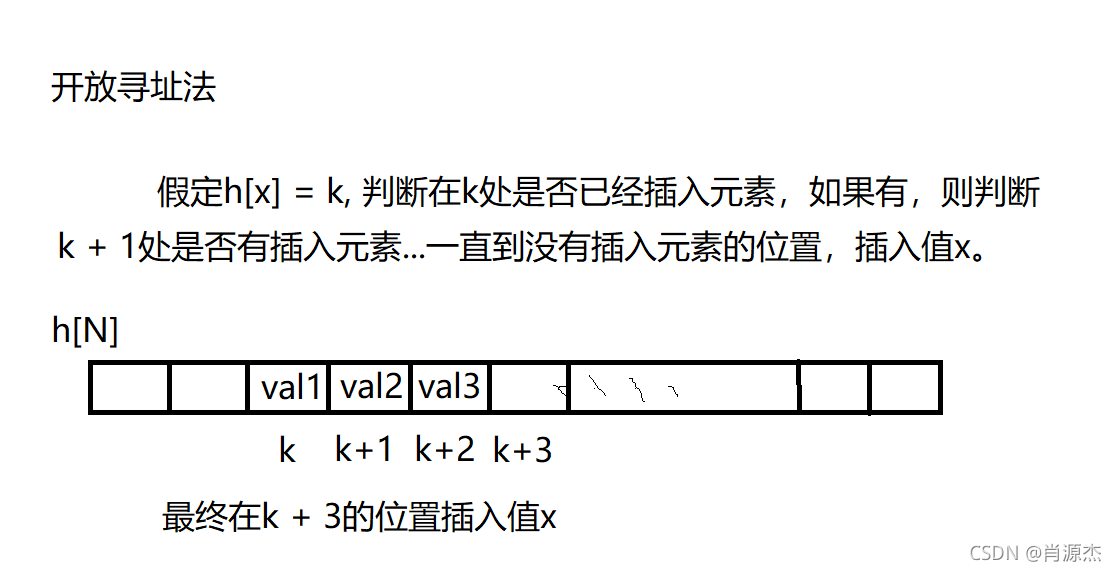
开放寻址法:
处理冲突的基本思路是创建一个一维数组,数组长度经验来说一般为题目操作数N的2~3倍,N表示总共需要存储的数的个数,本题而言,N最大为105,所以这里数组的容量至少开到为2*105。
对哈希函数而言,一般来说模的这个数,要取成质数,且这个质数要离2的整次幂尽可能的远,数学上可证明这么取的话冲突的概率是最小的。
以下算法来判断大于200000的第一个质数
判断最大质数
#include<iostream>
#include<cstring>
//判断100000以上第一个质数
using namespace std;
const int N = 200010;
int main() {
for (int i = 200000; ; i++) {
bool flag = true;
for (int j = 2; j * j <= i; j++) {
if (i % j == 0) {
flag = false;
break;
}
}
if (flag){
cout << i << endl;
break;
}
}
return 0;
}
结果输出为 200003;
故之后取数组长度为N = 200003。
插入的方法均从第k个数开始询问该位置是否有元素,有则k++,最终停留在没有元素的位置。
查找也一样,从第k个数开始询问这个位置存的数是否等于x。
int find(int x) {
int k = (x % N + N) % N; //若x是负数时,可用该方法避免下标k出现负值,
while (h[k] != null && h[k] != x) {
k ++;
if (k == N) k = 0;
}//最终k停留的地方为等于x或null处
return k;
}
我们在初始化h[N]以后要对其进行赋空null,以示此时没有元素插入,一般链表用-1,在此处,我们使用0x3f3f3f3f,来填充h[N]。宏定义null = 0x3f3f3f3f可以减少考虑时间:
引用一段他人博客中的介绍:
0x3f3f3f3f是一个很有用的数值,它是满足以下两个条件的最大整数。
1、整数的两倍不超过 0x7f7f7f7f,即int能表示的最大正整数。
2、整数的每8位(每个字节)都是相同的。
我们在程序设计中经常需要使用 memset(a, val, sizeof a) 初始化一个数组a,该语句把数值 val(0x00~0xFF)填充到数组a 的每个字节上,所以用memset只能赋值出“每8位都相同”的 int。
当需要把一个数组中的数值初始化成正无穷时,为了避免加法算术上溢出或者繁琐的判断,我们经常用 memset(a, 0x3f, sizeof(a)) 给数组赋 0x3f3f3f3f的值来代替。
(参考:https://blog.csdn.net/qq_31267769/article/details/88890612)
代码
#include<iostream>
#include<cstring>
using namespace std;
const int N = 200003, null = 0x3f3f3f3f;
int h[N];
int find(int x) {
int k = (x % N + N) % N;
while (h[k] != null && h[k] != x) {
k ++;
if (k == N) k = 0;
}
return k;
}
int main() {
int n;
scanf ("%d", &n);
memset(h, 0x3f, sizeof h); //填充h[N]
while (n--) {
char op[2];
int x;
scanf("%s%d",op, &x);
int k = find(x);
if (op[0] == 'I') h[k] = x;
else {
if (h[k] != null) puts("Yes");
else puts("No");
}
}
return 0;
}