一﹑实验目的
通过动态优先权算法的模拟加深对进程概念和进程调度过程的理解。
二﹑实验内容与基本要求
编制模拟动态优先权算法的程序,并给出的例子验证所编写的程序的正确性。
1.用C语言实现对N个进程采用动态优先权算法的调度。
2.每个用来标识进程的进程控制块PCB可用结构来描述,包括以下字段:
? 进程标识数ID。
? 进程优先数PRIORITY,并规定优先数越大的进程,其优先权越高。
? 进程已占用CPU时间CPUTIME。
? 进程还需占用的CPU时间ALLTIME。当进程运行完毕时,ALLTIME变为0。
? 进程的阻塞时间STARTBLOCK,表示当进程再运行STARTBLOCK个时间片后,进程将进入阻塞状态。
? 进程被阻塞的时间BLOCKTIME,表示已阻塞的进程再等待BLOCKTIME个时间片后,将转换成就绪状态。
? 进程状态STATE。
? 队列指针NEXT,用来将PCB排成队列。
3.优先数改变的原则:
? 进程在就绪队列中呆一个时间片,优先数增加1。
? 进程每运行一个时间片,优先数减3。
4.为了清楚地观察每个进程的调度过程,程序应将每个时间片内的进程的情况显示出来,包括正在运行的进程,处于就绪队列中的进程和处于阻塞队列中的进程。
#include<stdio.h>
#include<stdlib.h>
typedef struct PCB{
int ID; //进程标识数
int priority;//优先数
int cpuTime;//已用时间
int allTime;//总共还需时间
int startBlock;//运行多少时间片后阻塞
int blockTime;//在阻塞队列多长时间后进入就绪状态
int state;//进程状态1表示运行,2表示就绪,3表示阻塞,0表示运行完
struct PCB *next;
}PCB,*pcb;
pcb p1,p2,lastp;
pcb ReadyQueue,BlockQueue,RunPCB;
pcb accQueue,acclast;//完成队列
void GetPCB();
void Run();
void PushReady(pcb p1);
void ShowQueue(int cputime);
int main(){
ReadyQueue=BlockQueue=RunPCB=NULL;//初始化
accQueue=acclast=(pcb)malloc(sizeof(PCB));
accQueue->next = NULL;
GetPCB();
Run();
system("pause");
}
void GetPCB(){
FILE *fp;
if((fp=fopen("F://pcb.txt","r"))==NULL){
printf("打开文件失败\n");
exit(1);
}
p1 = (pcb)malloc(sizeof(PCB));
while(fscanf(fp,"%d %d %d %d %d %d %d",&p1->ID,&p1->priority,
&p1->cpuTime,&p1->allTime,&p1->startBlock,&p1->blockTime,&p1->state)==7){
p1->next = NULL;
if(p1->state==2) PushReady(p1);
p1 = (pcb)malloc(sizeof(PCB));
}
}
void Run(){
int CupTime=0;
RunPCB=ReadyQueue;
ReadyQueue=ReadyQueue->next;
ShowQueue(0);
for(;1;CupTime++){
//更新值
if(RunPCB){
RunPCB->cpuTime++;
RunPCB->allTime--;
RunPCB->priority -= 3;//优先数减3
if(RunPCB->startBlock>0)
RunPCB->startBlock--;
}
p1 = ReadyQueue;
while(p1){//优先数加1
p1->priority++;
p1 = p1->next;
}
if(RunPCB){//判断RunPCB的状态
if(RunPCB->allTime==0) {
acclast->next = RunPCB;
acclast = RunPCB;
acclast->state = 0;
RunPCB = NULL;
}
}//判断RunPCB
if(RunPCB==NULL){//更新RunPCB
RunPCB = ReadyQueue;
if(ReadyQueue) ReadyQueue = ReadyQueue->next;
}else if(ReadyQueue && RunPCB->priority < ReadyQueue->priority){//优先值小了
PushReady(RunPCB);
RunPCB = ReadyQueue;
ReadyQueue = ReadyQueue->next;
}
if(RunPCB) RunPCB->state= 1;
ShowQueue(CupTime+1);
if(ReadyQueue==BlockQueue && BlockQueue==RunPCB && RunPCB==NULL) break;
}
}
void PushReady(pcb p1){//以priority降序
p1->state = 2;
lastp = p2 = ReadyQueue;
while(p2 && p2->priority>=p1->priority)
{//查找第一个比p1小的pcb
lastp = p2;
p2 = lastp->next;
}
if(lastp==p2){//插到队头
p1->next = ReadyQueue;
ReadyQueue = p1;
}else{//插到队中
p1->next = p2;
lastp->next = p1;
}
//前插队列
}
void ShowQueue(int cputime){//显示两个队列,和运行的程序
printf("\n----------------------------------------------");
printf("----------------------------------------------\n");
printf("\t当前时间片:%d\n", cputime);
printf("\t%10s %10s %10s %10s %10s %10s %10s\n",
"ID", "priority", "cpuTime", "allTime", "startBlock", "blockTime"," state");
printf("正在运行程序:\n");
p1 = RunPCB;
if(RunPCB)
printf("\t%10d %10d %10d %10d %10d %10d %10d\n",
p1->ID, p1->priority, p1->cpuTime, p1->allTime, p1->startBlock, p1->blockTime, p1->state);
printf("\n就绪队列:\n");
p1 = ReadyQueue;
while(p1){//优先数加1
printf("\t%10d %10d %10d %10d %10d %10d %10d\n",
p1->ID, p1->priority, p1->cpuTime, p1->allTime, p1->startBlock, p1->blockTime, p1->state);
p1 = p1->next;
}
printf("\n阻塞队列:\n");
p1=BlockQueue;
while(p1){//阻塞时间-1
printf("\t%10d %10d %10d %10d %10d %10d %10d\n",
p1->ID, p1->priority, p1->cpuTime, p1->allTime, p1->startBlock, p1->blockTime, p1->state);
p1 = p1->next;
}
printf("\n完成队列:\n");
p1 = accQueue;
while (1){
p1 = p1->next;
if(p1) printf("\t%10d %10d %10d %10d %10d %10d %10d\n",
p1->ID, p1->priority, p1->cpuTime, p1->allTime, p1->startBlock, p1->blockTime, p1->state);
if(p1==NULL||p1==acclast) break;
}
}
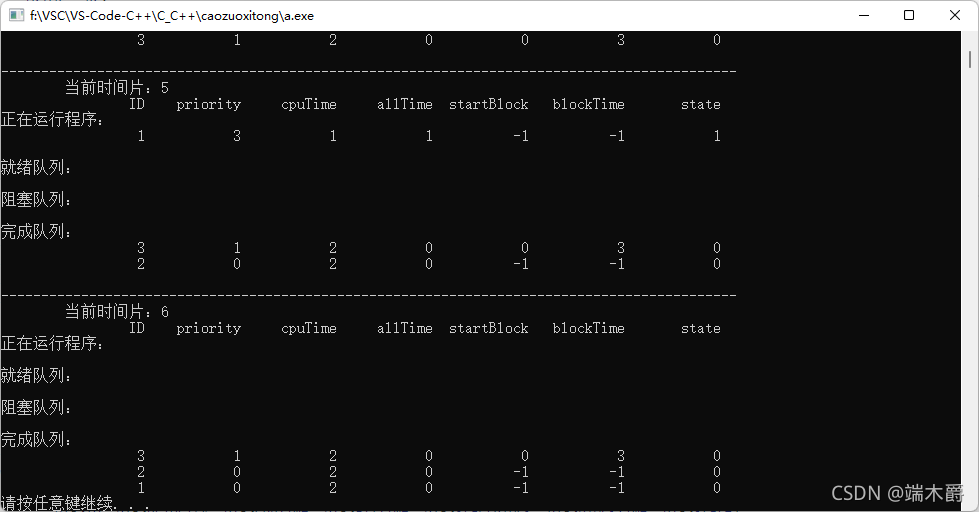
运行截图