八大排序算法


如果点个赞
万字总结
文章目录
前言
排序是数据结构中很重要的一章,先介绍几个基本概念。
-
排序稳定性:多个具有相同的关键字的记录,若经过排序,这些记录的相对次
序保持不变,即在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的;否则称为不稳定的。 -
内部排序:数据元素全部放在内存中的排序。
-
外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序。
一、插入排序
时间复杂度
最坏:-----------O(N^2)
最好:-----------O(N)
平均:-----------O(N^2)
空间复杂度
O(1)
稳定性:稳定
-『 插入排序 』:顾名思义就是把每一个数插入到有序数组中对应的位置。
就相当于你玩扑克牌的过程,抓来一张牌,就放在对应有序位置
- 直接插入排序:
当插入第i(i>=1)个元素时,前面的array[0],array[1],…,array[i-1]已经排好序,此时用array[i]的排序码与array[i-1],array[i-2],…的排序码顺序进行比较,找到插入位置即将array[i]插入,原来位置上的元素顺序后移

代码实现(升序):
void InsertSort(int* a, int n)
{
for (int i = 0; i < n - 1; i++)
{
int x = a[end+1];//x为待排序的值
int end = i;//从end开始往前和x依次比较
while (end >= 0)
{
if (a[end] > x)//只要当前的值大于x继续往前找
{
a[end+1] = a[end];
end--;
}
else
{
break;//跳出循环说明a[end] <= x
}
}
a[end + 1] = x;//跳出循环说明a[end] <= x,需要把x插入到end前边
}
}
- 那么我们可以看到,越是接近有序的数组,插入排序的效率越高(有序时对于任何一个数只需要和前边的数比较一次)。
二、希尔排序
时间复杂度
O(n^(1.3―2))
空间复杂度
O(1)
稳定性:稳定
- 『 希尔排序 』(Shell’s Sort)是插入排序的一种又称“缩小增量排序”(Diminishing Increment Sort),是直接插入排序算法的一种更高效的改进版本。希尔排序是非稳定排序算法。该方法因 D.L.Shell 于 1959 年提出而得名。
- 该方法实质上是一种『 分组插入 』方法,因为插入排序对于接近有序的数组排序效率非常高,那么希尔提出:
- 算法先将要排序的一组数按某个增量d分成若干组,每组中记录的下标相差d.对每组中全部元素进行排序,然后再用一个较小的增量对它进行分组,在每组中再进行排序。当增量减到1时,整个要排序的数被分成一组,排序完成。
- 一般的初次取序列的一半为增量,以后每次减半,直到增量为1。
并且插入排序可以看成分组是1的希尔排序。动图如下:

- 因为插入排序可以看做gap==1的希尔排序,因此只需要改变插入排序中for循环的增量控制排序即可。
代码:
void ShellSort(int* a, int n)
{
//按gap分组进行预排序
int gap = n;
while (gap>1)
{
//gap = gap / 2;
gap = gap / 3 + 1;//这里分组选每次折半或者/3都可以
for (int j = 0; j < gap; j++)//gap个组
for (int i = j; i < n - gap; i+=gap)//每个组从j开始每个增量gap
{
int end = i;
int x = a[end + gap];
while (end >= 0)
{
if (a[end] > x)
{
a[end + gap] = a[end];
end -= gap;
}
else
{
break;
}
}
a[end + gap] = x;
}
}
}
- 关于希尔排序时间复杂度证明比较复杂,取决于gap怎么取,如果按照Knuth提出的/3,来取是O(n^(1.25)- 1.6*O(n^1.25).
- 希尔排序的特性总结:
- 希尔排序是对直接插入排序的优化。
- 当gap > 1时都是预排序,目的是让数组更接近于有序。当gap == 1时,数组已经接近有序的了,这样就
会很快。这样整体而言,可以达到优化的效果。我们实现后可以进行性能测试的对比。 - 希尔排序的时间复杂度不好计算,因为gap的取值方法很多,导致很难去计算,因此在好些树中给出的希尔排序的时间复杂度都不固定
三、选择排序
时间复杂度
最坏:-----------O(N^2)
最好:-----------O(N^2)
平均:-----------O(N^2)
空间复杂度
O(1)
稳定性:不稳定
- 『 基本思想 』:
每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始(末尾)位置,直到全部待排序的数据元素排完 。如图:

代码:
void SelectSort(int* a, int n)
{
int begin = 0;
int end = n - 1;
int mini = begin;//记录最小值下标
while (begin<end)
{
for (int i = begin; i < end; i++)
{
if (a[i] < a[mini])
{
mini = i;//更新最小值下标
}
}
Swap(&a[mini],&a[begin]);//把最小值放到左边
++begin;//左边对应起始位置++
}
}
- 直接选择排序思考非常好理解,但是效率不是很好。实际中很少使用。
四、堆排序
时间复杂度
最坏:-----------O(N * logN)
最坏:-----------O(N * logN)
平均:-----------O(N*logN)
空间复杂度
O(1)
- 堆排序(Heapsort)是指利用堆积树(堆)这种数据结构所设计的一种排序算法,它是选择排序的一种。它是通过堆来进行选择数据。需要注意的是排升序要建大堆,排降序建小堆。
- 具体可见另一篇文章堆排序和TopK问题
- 动图:

代码:
void Swap(int* px,int* py)
{
int t = (*px);
(*px) = (*py);
(*py)= t ;
}
void AdjustDown(int* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
if (child + 1 < n && a[child + 1] > a[child])
{
child++;
}
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
for (int i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(a, n, i);
}
for (int i = n - 1; i > 0; i--)
{
Swap(&a[0], &a[i]);
AdjustDown(a, i, 0);
}
}
五、冒泡排序
时间复杂度
最坏:-----------O(N^2)
最好:-----------O(N)
平均:-----------O(N^2)
空间复杂度
O(1)
- 『 冒泡排序 』是大家最熟悉的也是最容易理解的排序,如下图:

- 『 冒泡排序基本思想 』就是每一次将相邻的数据进行『 两两比较 』,选出最大的依次比较送到右边,那么最右边就是最大值,而左边留下的自然就是小的(排升序)
-『 冒泡排序 』需要两层循环
『 内层循环 』表示一次冒泡,也就是两两比较先选出最大的放到最右边,同时注意每一次冒泡选出最大元素,那么两两比较次数-1(下一次不用比较选好的最右边)
『 外层循环 』控制的是冒泡的次数(假设数组N 个元素)也就是N-1次冒泡选出N-1个最大的元素
初版代码如下:
//初版:
void Swap(int* px, int* py)
{
int t = (*px);
*px = (*py);
(*py) = t;
}
void BubbleSort(int* a, int n)
{
for (int i = 0; i < n-1; i++)//外层循环
{
for (int j = 0; j < n-1-i; j++)
{
if(a[j]>a[j+1])
Swap(&a[j],& a[j + 1]);//交换
flag = 1;
}
}
}
- 时间复杂度分析:每一次比较次数是N-1,N-2,N-3***1.因此是N(N-1)/2
- 但是这种写法还是有缺陷,时间复杂度永远是O(N^2) , 对于一个已经排好序的数组来说,还是需要N^2的复杂度,但对于有序的数组,每一次冒泡都不会进行交换因为有序,因此如果只要任何一次冒泡中没有数据交换就证明数组有序了。时间复杂度最好也可以达到0(N)。
代码优化如下:
//优化:
void BubbleSort(int* a, int n)
{
for (int i = 0; i < n-1; i++)
{
int flag = 0;
for (int j = 0; j < n-1-i; j++)
{
if(a[j]>a[j+1])
Swap(&a[j],& a[j + 1]);
flag = 1;
}
if (flag == 0)
break;
}
}
六、快排排序
时间复杂度
最坏:-----------O(N^2)
最好:-----------O(logN)
平均:-----------O(logN)
空间复杂度
O(logN)
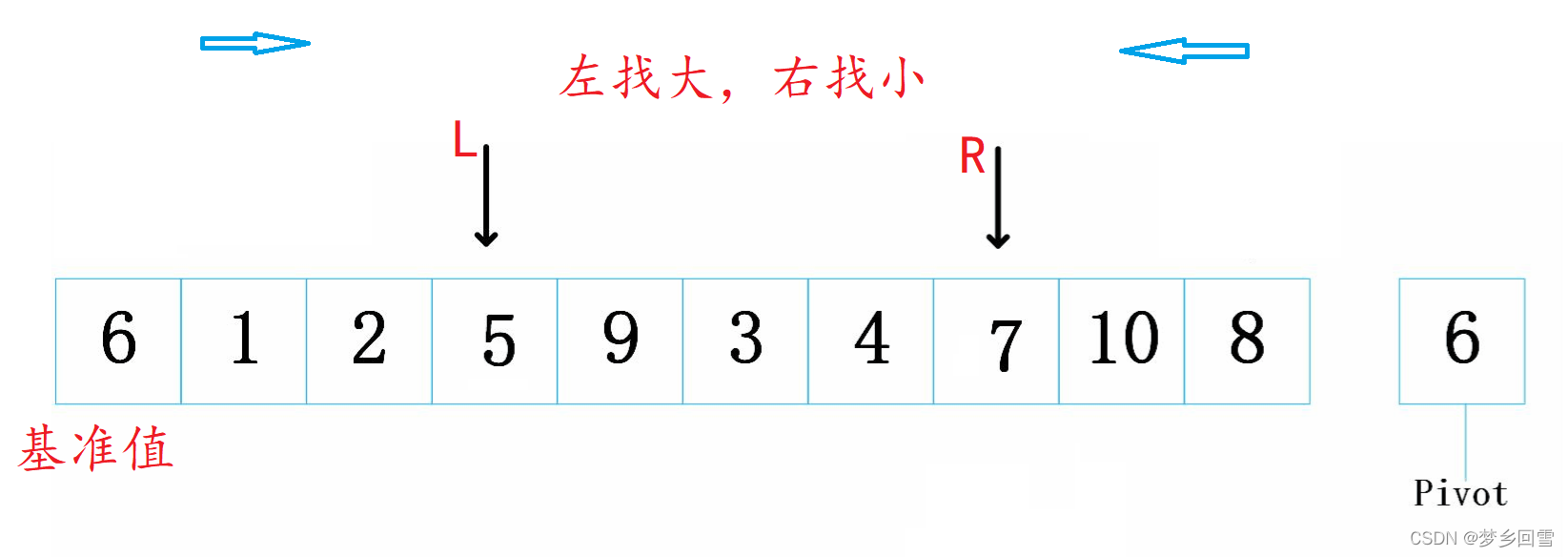
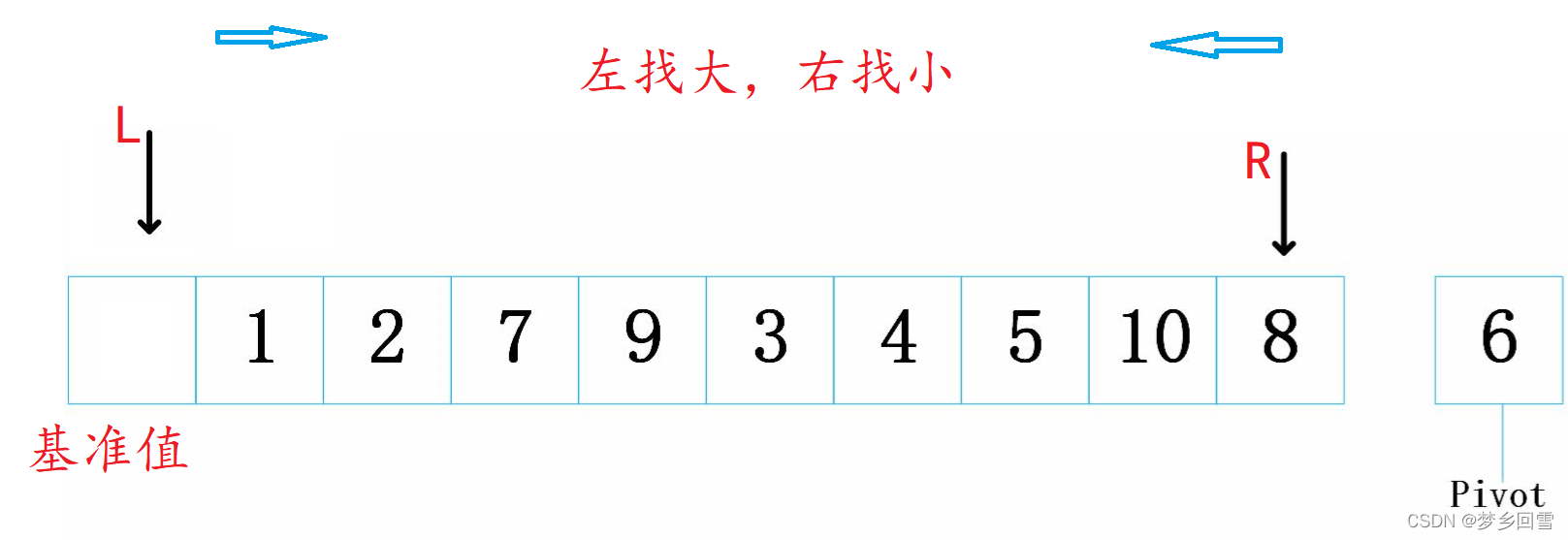
- 『 快速排序 』是Hoare于1962年提出的一种二叉树结构的交换排序方法,其『 基本思想 』为:任取待排序元素序列中的某元素作为『 基准值 』,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。如图:

递归写法:
- 框架:
// 假设按照升序对a数组中[left, right)区间中的元素进行排序
void QuickSort(int* a, int left, int right) {
if(right >= left )
return;//递归截止条件
// 按照基准值对a数组的 [left, right]区间中的元素进行划分
int keyi= partion(a, left, right);
// 划分成功后以keyi为边界形成了左右两部分 [left, keyi-1] 和 [keyi+1, right]
// 递归排[left, keyi-1]
QuickSort(a, left, keyi-1);
// 递归排[keyi+1, right]
QuickSort(a, keyi+1, right);
}
-
. 递归框架写完了接下来就差partion函数的实现也就是快排的灵魂,去每一次找基准值。那么一共有三种写法如下:
-
hoare版本

-
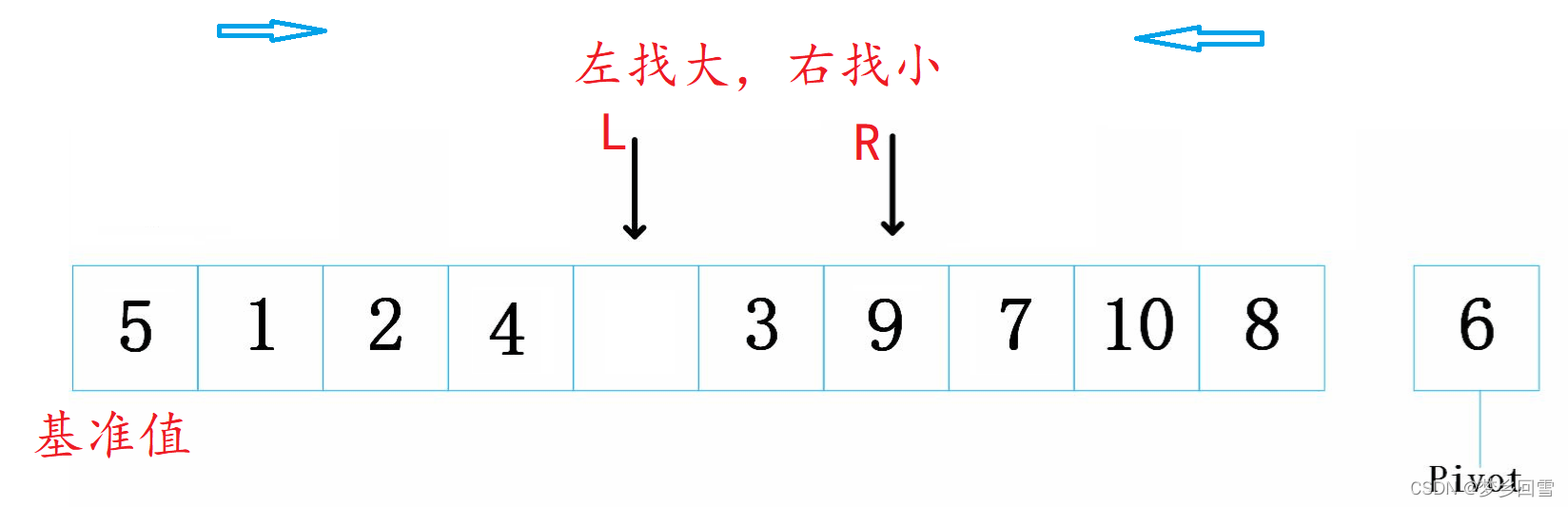
- 首先就是要找基准值,这里你可以选最左边或最右边的值(图中是6)
-
- 两个指针指向头(这里选左为基准值,头指针指向第二个)和尾,基准值选左,则右指针先走,反之左指针先走。
-
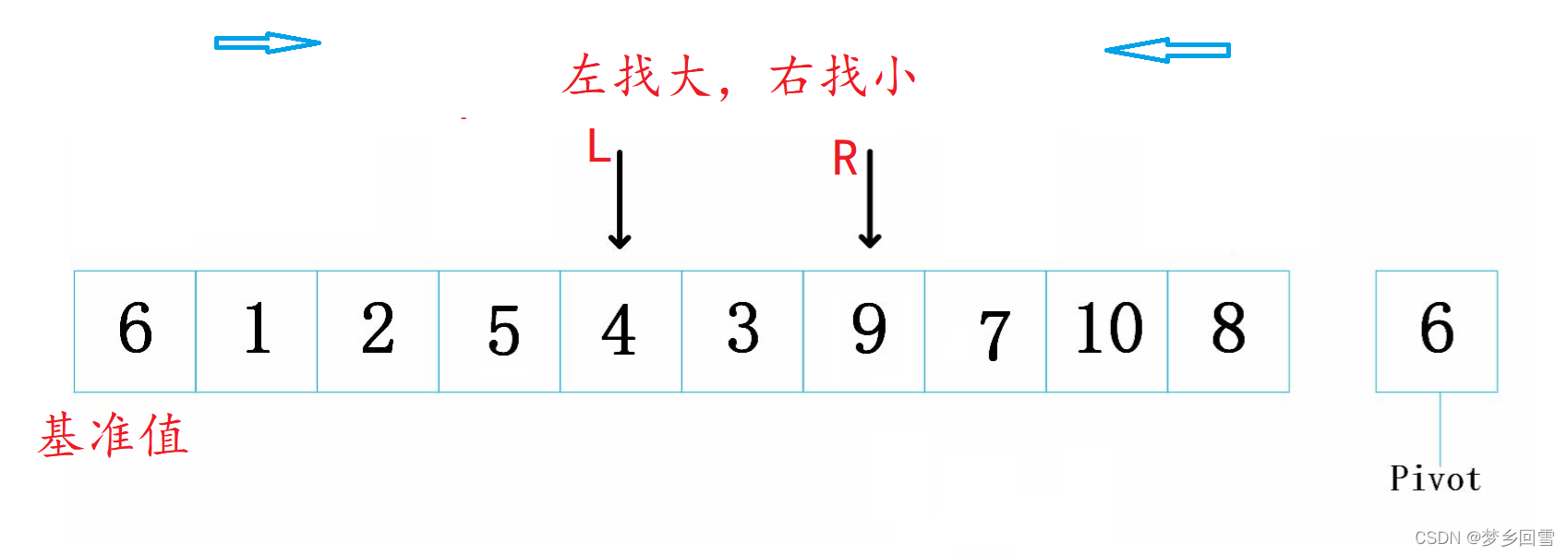
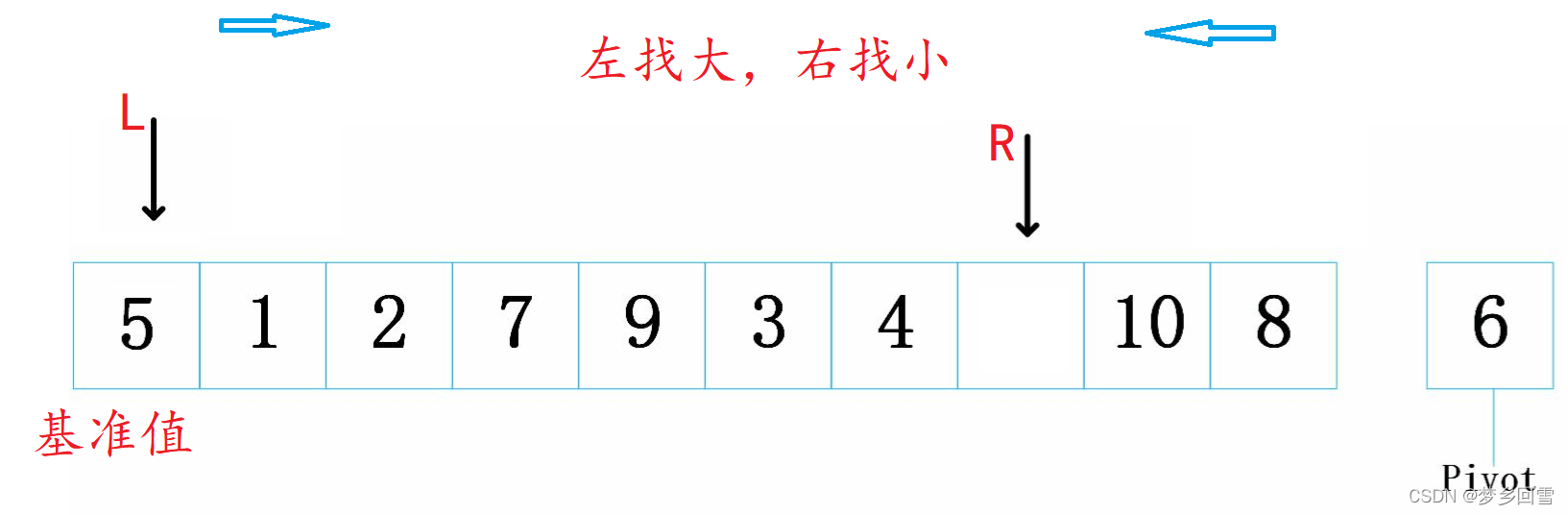
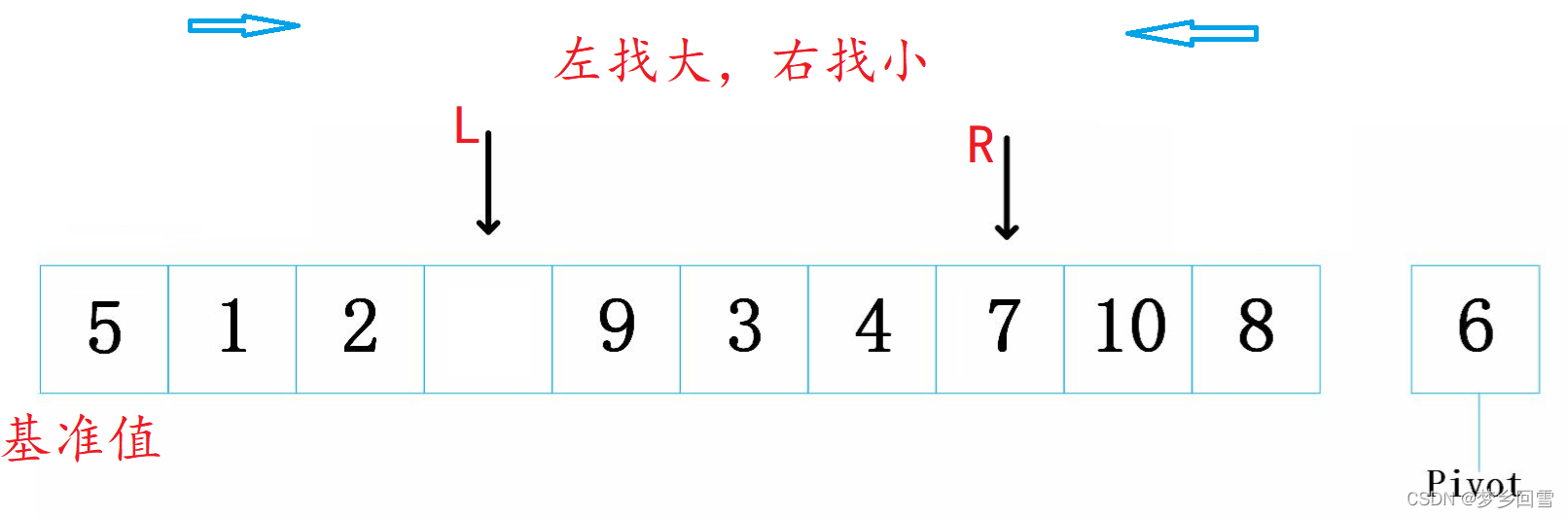
- 左指针找到比基准值大的停下,右指针找比基准值小的停下,交换左右指针指向值
-
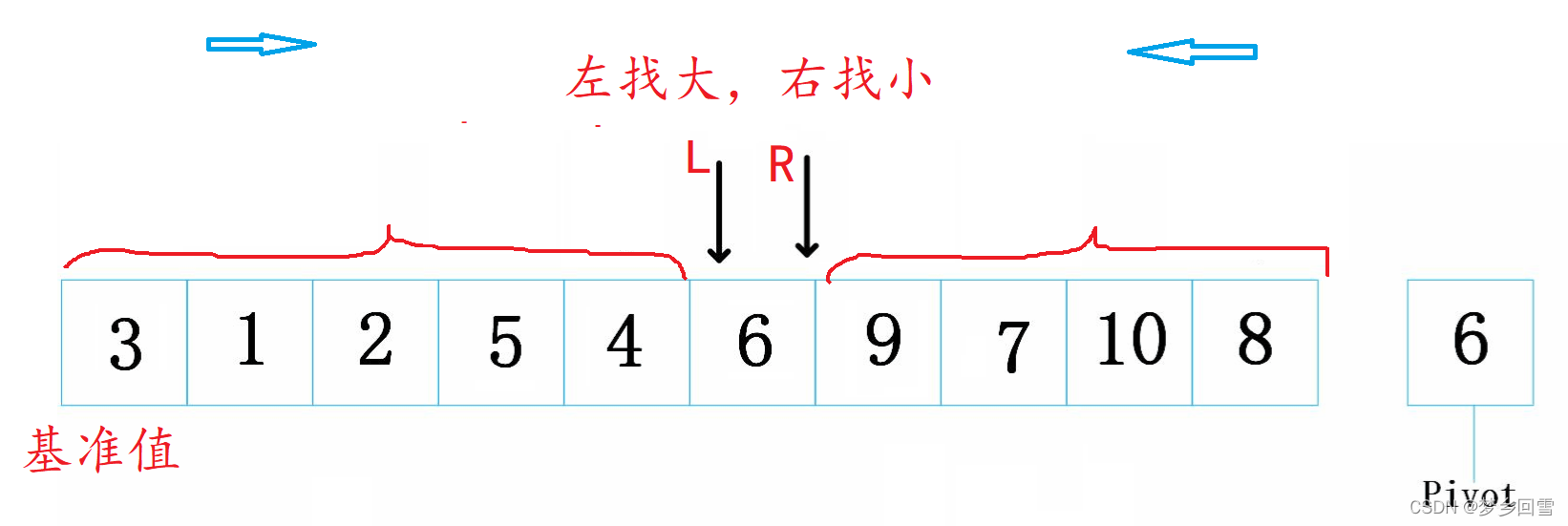
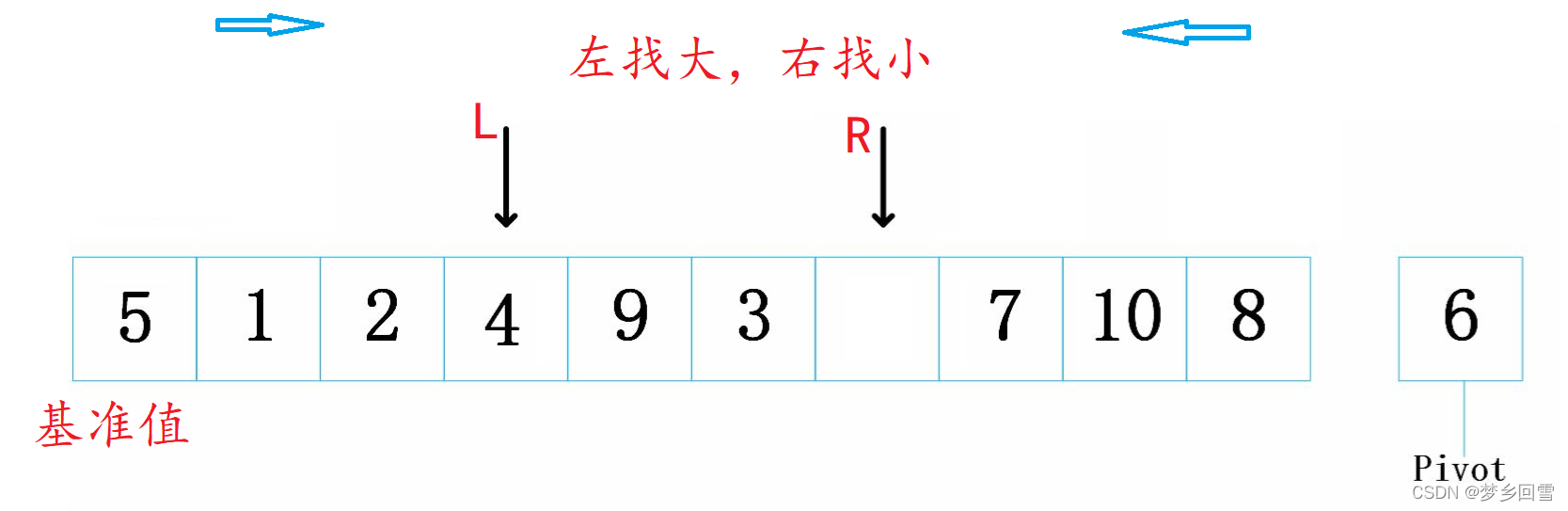
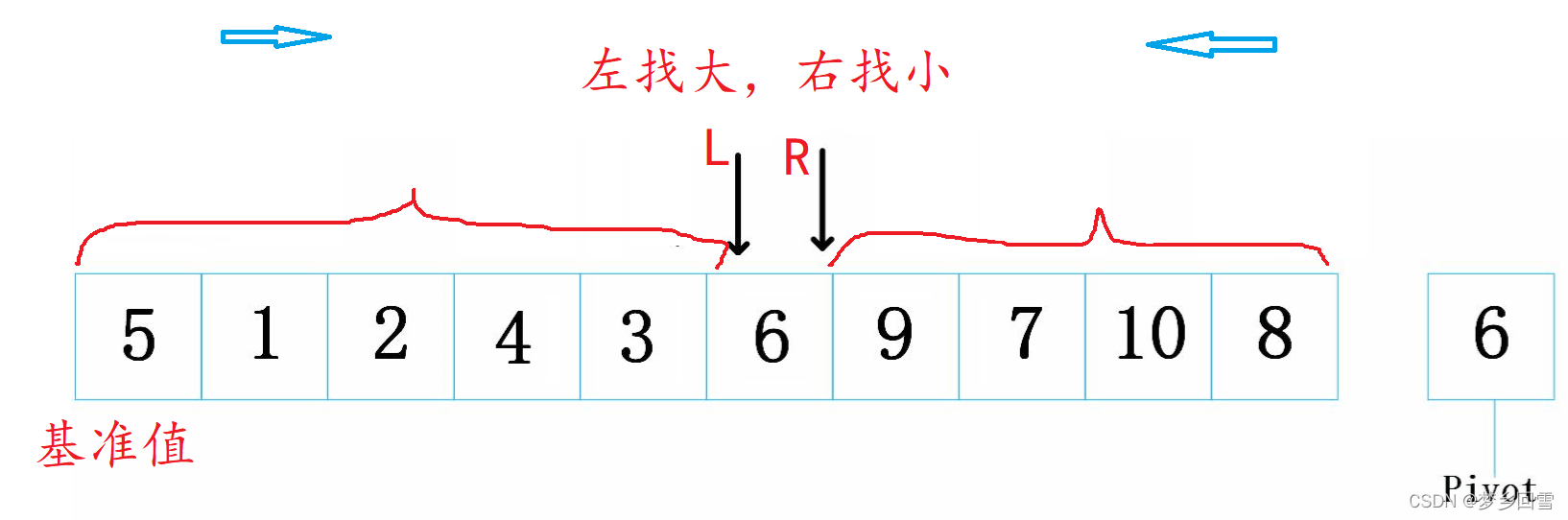
- 重复2.3动作,直到左右指针相遇,交换左指针值和基准值

- 重复2.3动作,直到左右指针相遇,交换左指针值和基准值
-
左值为基准,右指针先走找比6小的:

-
左值为基准,右指针先走找比6小的:

-
交换:
最终效果:相遇交换左指针和基准值,保证了6的左边都比6小,右边比6大。
- 并且除此之外,由于我们看到这种算法类似于二叉树的思想排好中间再排左右子树,因此我要保证选取的随机值尽量位与中位数。所以我们采取三数取中的方法。(选取最左值最右最中间的数的中位数)效率是可以提升5%到10%的。
//三数取中
int GetMidIndex(int* a, int left, int right)
{
//int mid = (left + right) / 2;
//int mid = left + (right - left) / 2;
int mid = left + ((right - left)>>1);
if (a[left] < a[mid])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[left] > a[right])
{
return left;
}
else
{
return right;
}
}
else//a[left] > a[mid]
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[left] < a[right])
{
return left;
}
else
{
return right;
}
}
}
int Partion(int* a, int left,int right)
{
int mini = GetMidIndex(a, left, right);
Swap(&a[mini], &a[left]);
int keyi = left;
while (left < right)
{
while (left < right && a[right] >= a[keyi])
{
right--;
}
while (left < right && a[left] <= a[keyi])
{
left++;
}
Swap(&a[left], &a[right]);
}Swap(&a[left], &a[keyi]);
return left;
}
-
挖坑法
-
挖坑法就是对hoare版本的一种变形,过程如下:
初始如下:先保存基准值,基准值形成一个坑位!
-
左为基准,右指针先走,找到小的送到坑位,那么此刻右指针形成了新的坑位
-
左指针出动,找到大的继续送到坑位,左指针形成了新的坑位
-
指针相遇,把6写入。也保证左边比6小,右边比6大。代码如下:
//挖坑法
int Partion2(int* a, int left, int right)
{
int mini = GetMidIndex(a, left, right);
Swap(&a[mini], &a[left]);
int key = a[left];
int pivot = left;
while (left < right)
{
//右边先找小
while (left< right && a[right] >= key)
{
--right;
}
a[pivot] = a[right];
pivot = right;
while (left < right && a[left] <= key)
{
++left;
}
a[pivot] = a[left];
pivot = left;
}
a[pivot] = key;
return pivot;
}
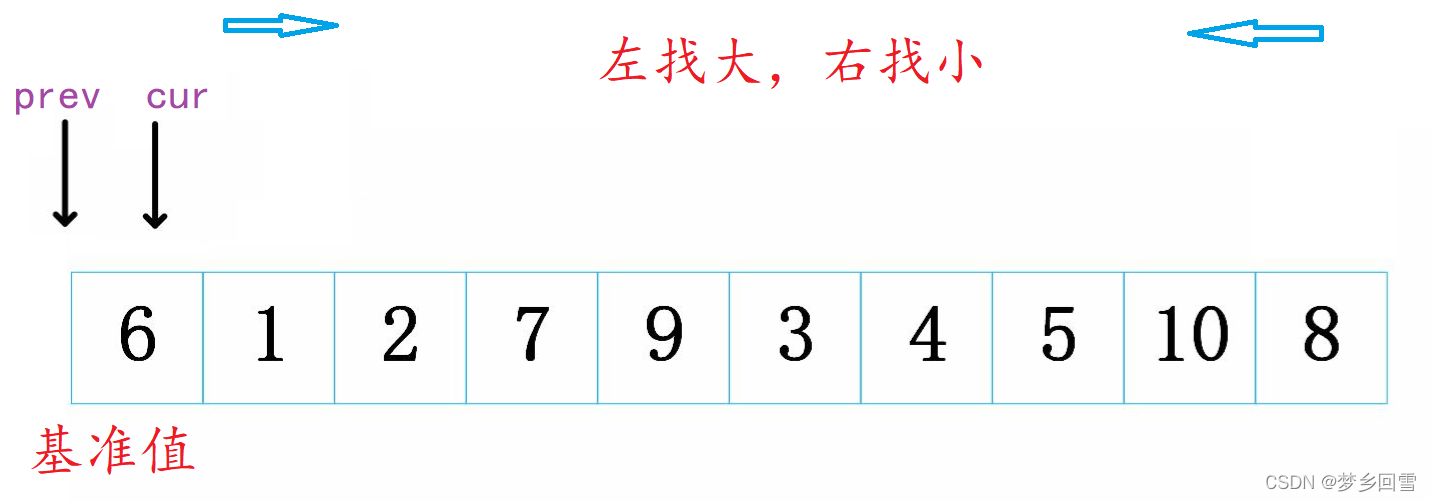
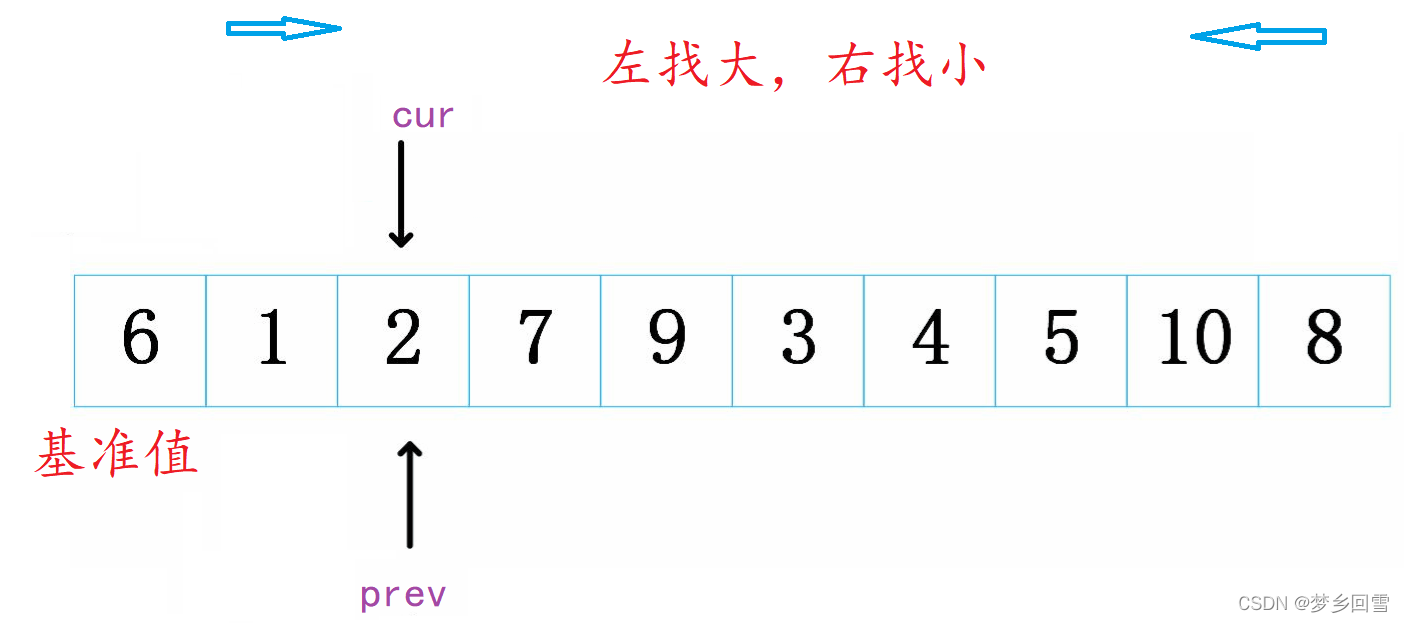
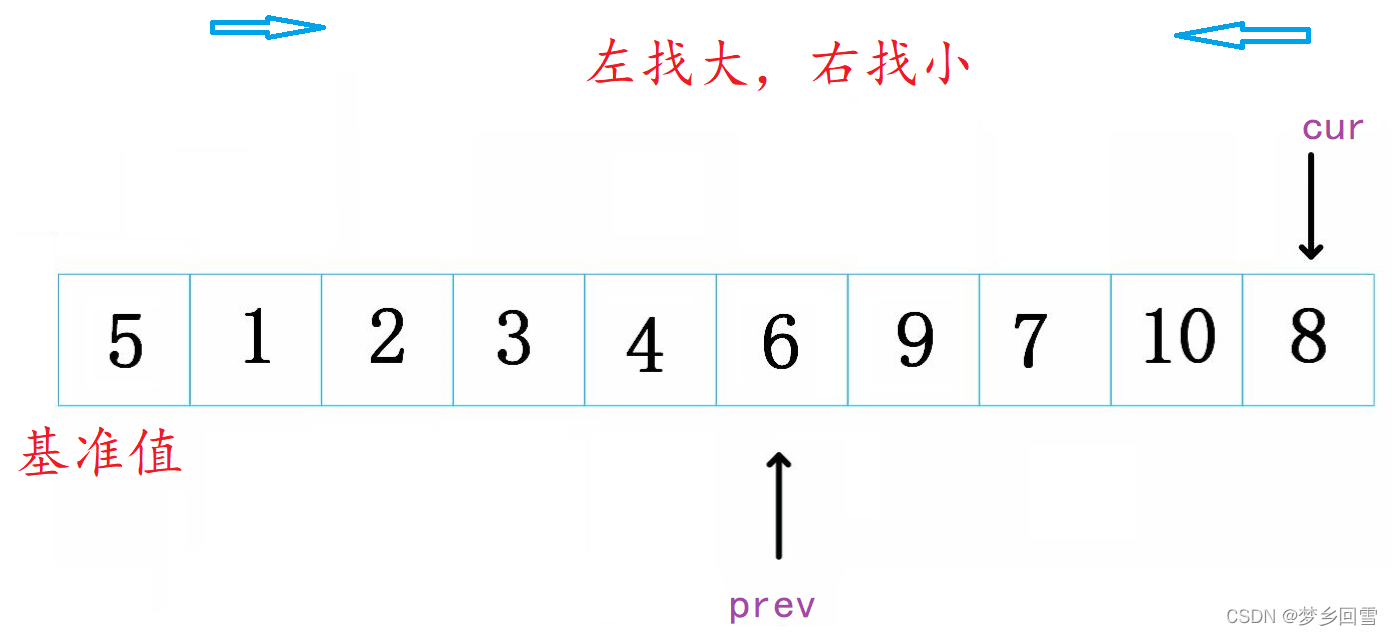
- 前后指针版本
- 顾名思义,使用两个指针,这里选取左为基准值为例,两个指针从左开始出发一个cur,一个prev。
- 要求:
cur指针先走,一旦找到比基准值小的就停下,++prev,并交换。
cur指针一直到头为止,最后交换prev指向值和基准值
-
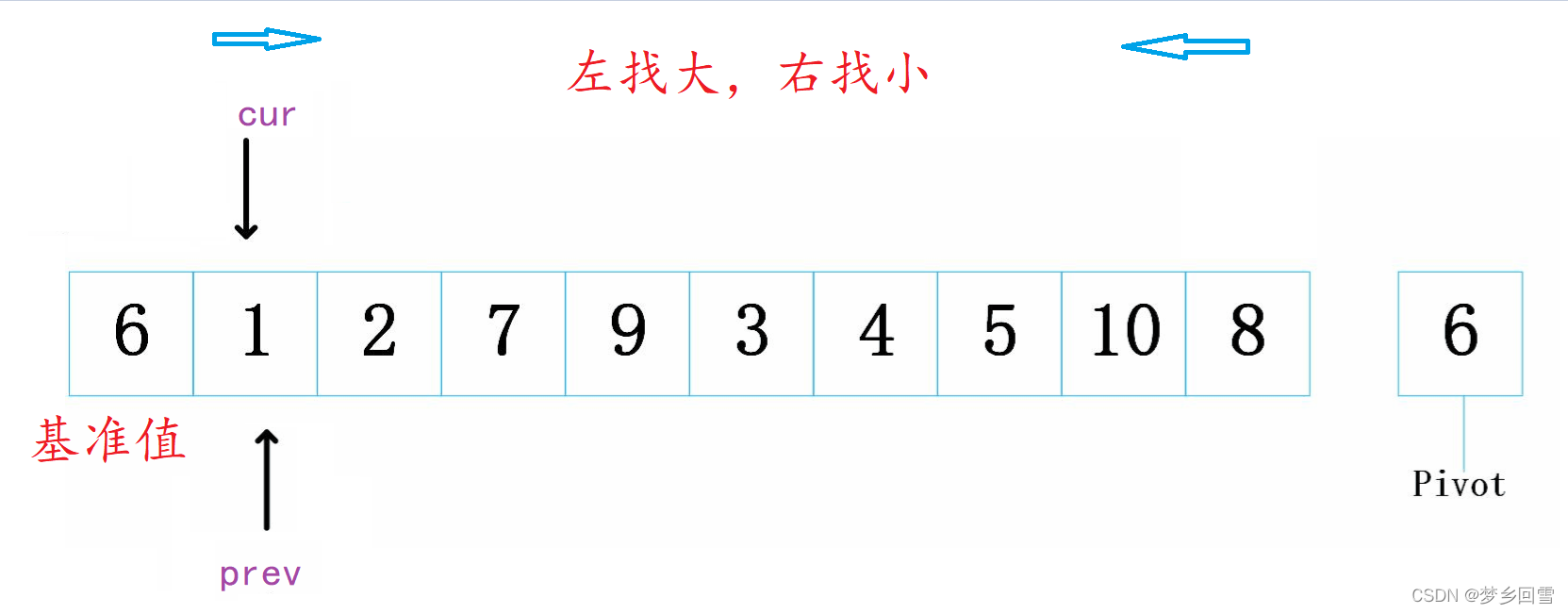
1和2都比6小cur走一步停一步,prev++并交换,指向相等。
-
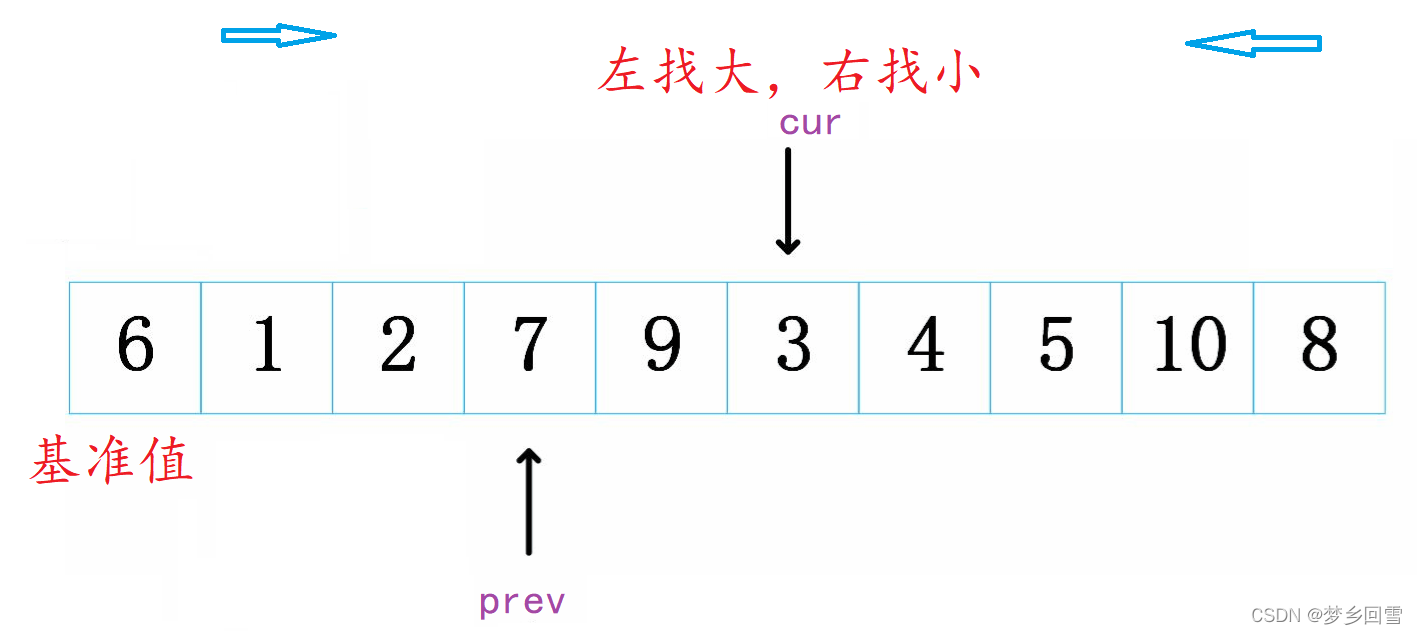
cur越过7和9去找小的3,此时停下,prev++指向7交换。(我们注意到prev和cur不等时prev永远是去找大的,cur是找小的,因此交换就做到把cur指向的小的往前扔,大的往后仍,)
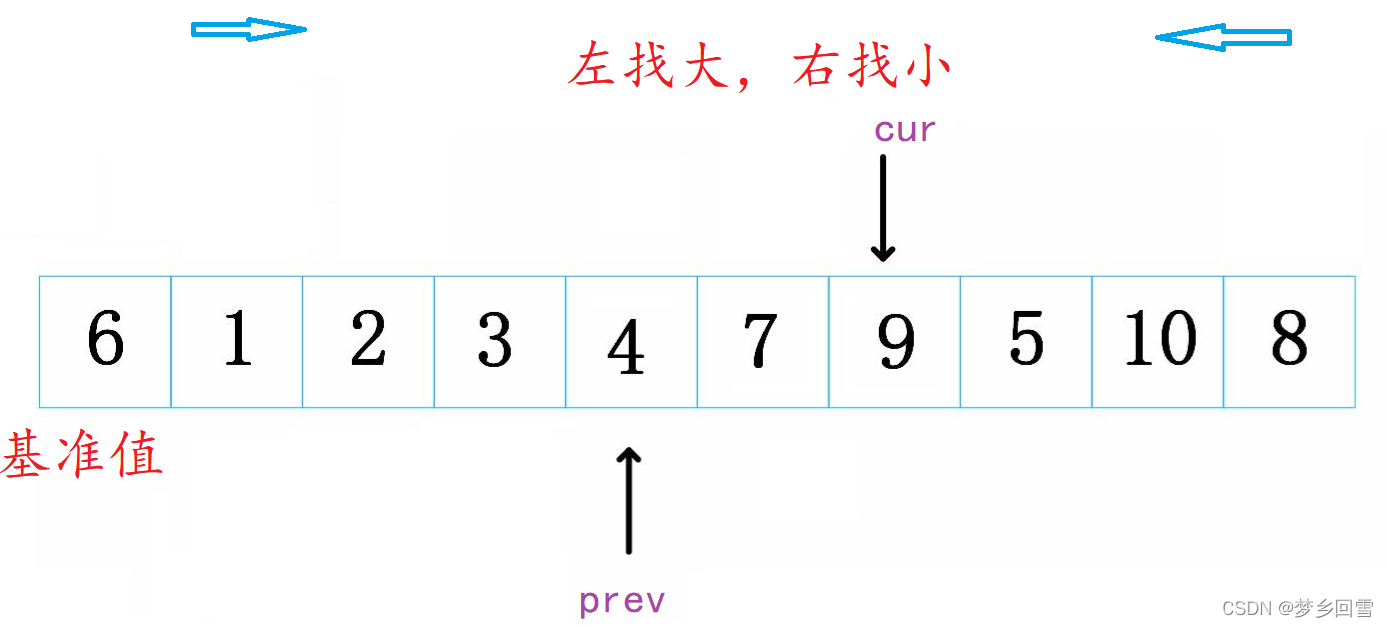
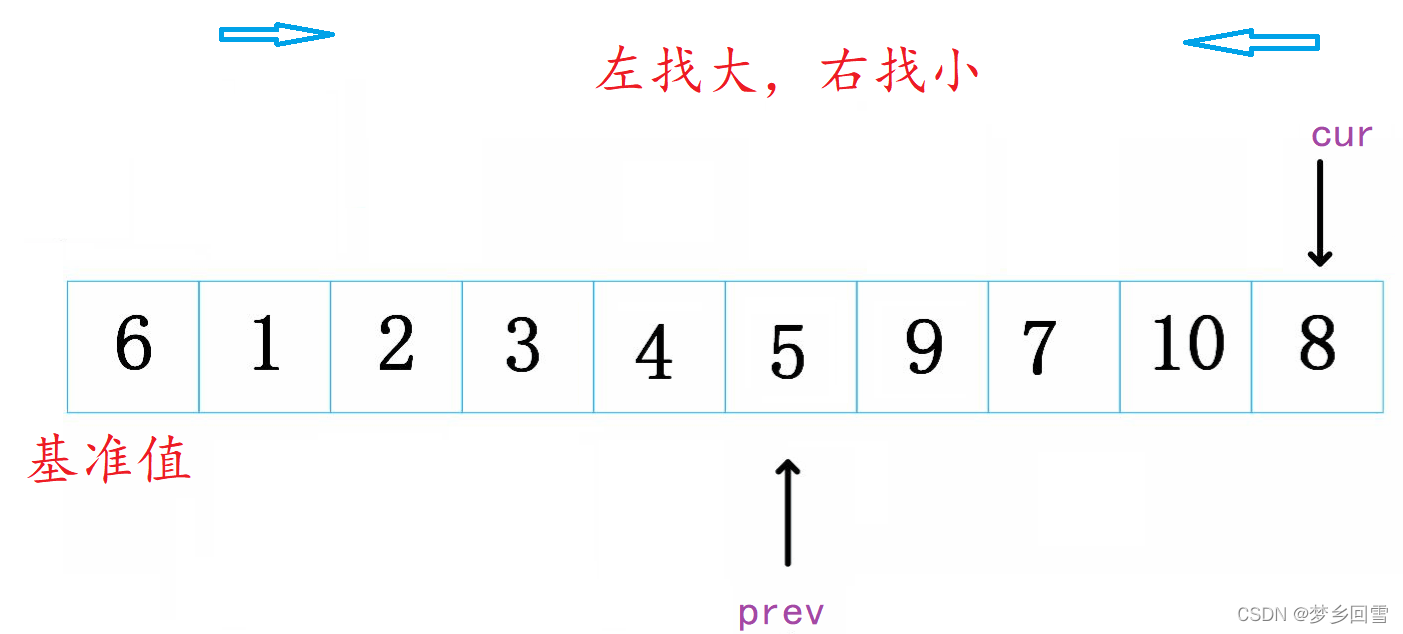
- 整个过程如上,代码:
//前后指针法
int Partion3(int* a, int left, int right)
{
int mini = GetMidIndex(a, left, right);
Swap(&a[mini], &a[left]);
int prev = left, cur = left+1;
int keyi = left;
while (cur<=right)
{
if (a[cur] < a[keyi] && ++prev !=cur)
{
Swap(&a[prev], &a[cur]);
}
cur++;
}
Swap(&a[prev], &a[keyi]);
return prev;
}
小结
递归版本三种方法如上,但是递归毕竟有缺陷,就是需要不断开辟栈帧,当数据量超过10W以上时就会有栈溢出的风险。
并且递归类似二叉树的结构越往下递归调用越多,栈帧翻倍开辟,因此我们还可以去优化一下,就是当递归到左右区间比较小时,我们去控制剩下的排序用别的排序来代替它。
//优化:
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
if (right - left + 1 < 10)
{
//小区间优化
InsertSort(a + left , right - left + 1);
}
else
{
int keyi = Partion3(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi + 1, right);
}
}
非递归:
- 非递归版本就是改变了快排的框架,用一个栈和循环来代替递归实现。依次将左右下标入栈出栈(出栈之前排序)来模拟递归。
void QuickSortNonR(int* a, int left, int right)
{
Stack st;//定义一个栈
StackInit(&st);//初始化
StackPush(&st, left);//左下标入栈
StackPush(&st, right);//右下标入栈
while (StackEmpty(&st)!=0)
{
int end = StackTop(&st);//获取栈顶元素即后入栈的右下标
StackPop(&st);//出栈
int begin = StackTop(&st);//获取栈顶元素即先入栈的左下标
StackPop(&st);//出栈
int keyi = Partion3(a, begin, end);
if (keyi + 1 < end)//相当于递归左半部分
{
StackPush(&st, keyi + 1);
StackPush(&st, right);
}
if (begin < keyi-1)
{
StackPush(&st, begin);
StackPush(&st, keyi-1);
}
}
}
七、归并排序
时间复杂度
最坏:-----------O(NlogN)
最好:-----------O(NlogN)
平均:-----------O(NlogN)
空间复杂度
O(N)
稳定性:稳定
- 基本思想:
归并排序(MERGE-SORT)是建立在归并操作上的一种有效的排序算法,该算法是采用分治法(Divide andConquer)的一个非常典型的应用。将已有序的子序列合并,得到完全有序的序列;即先使每个子序列有序,再使子序列段间有序。若将两个有序表合并成一个有序表,称为二路归并。 动图演示:

- 归并的思想就是把先假设数组分成两个有序,对其进行筛选排序,如上图:
- 但是问题来了我们怎么保证数组是有序的?因此就要求我们从小区间开始对数组归并排序,对于上图中的数据,先对开始3和3归并,小的先进入到tmp数组,因此前两个就是有序,再对,5和6归并,5,6有序后,在归并3,3,5,6……以此类推
递归写法
- 框架:
void MergeSort(int* a,int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);//开辟N个大小数组
if (tmp == NULL)
{
exit(-1);
}
_MergeSort(a, 0, n - 1, tmp);//进行归并操作
free(tmp);
tmp = NULL;
}
-
归并排序:
-
运用递归先不断缩小偏序区间,在递归层层退出时一遍退出,一边对不断回大的区间归并排序:
void _MergeSort(int* a, int left, int right,int* tmp)
{
if (left >= right)
{
return;//递归截止条件left >= right区间中数的个数<=0个
}
int mid = left + (right - left) / 2;//取中
_MergeSort(a, left, mid, tmp);//对左区间递归
_MergeSort(a, mid+1, right, tmp);//对右区间递归
int begin1 = left, end1 = mid;//左区间
int begin2 = mid+1, end2 = right;//右区间
int i = left;
while (begin1 <= end1 && begin2 <= end2)
{
if (a[begin1] < a[begin2])
{
tmp[i++] = a[begin1++];
}
else
{
tmp[i++] = a[begin2++];
}
}
while (begin1 <= end1 )
{
tmp[i++] = a[begin1++];
}
while (begin2 <= end2)
{
tmp[i++] = a[begin2++];
}
for (size_t i = left; i <= right; i++)
{
a[i] = tmp[i];//把排好序[left,right]的tmp赋值给原数组
}
}
非递归
- 非递归的不同就是需要手动控制区间大小,也就是不断2倍扩大区间归并。
但是还需要注意就是当下标是奇数,无法分成整数个组的时候,需要考虑剩余的数,以及是否越界的问题
void MergeSortNonR(int* a, int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);
if (tmp == NULL)
{
exit(-1);
}
int gap = 1;
while (gap < n)
{
for (int i = 0; i < n; i += 2 * gap)
{
//[i][i+gap-1] [i+gap][i+2*gap-1]
int begin1 = i, end1 = i + gap-1;
int begin2 = i + gap, end2 = i + 2 * gap - 1;
int index = i;
if (end1 >= n || begin2 >= n)
{
break;
}
if (end2 >= n)
{
end2 = n - 1;
}
while (begin1<=end1 && begin2<=end2)
{
if (a[begin1] <= a[begin2])
{
tmp[index++] = a[begin1++];
}
else
{
tmp[index++] = a[begin2++];
}
}
while (begin1 <= end1)
{
tmp[index++] = a[begin1++];
}
while (begin2 <= end2)
{
tmp[index++] = a[begin2++];
}
//控制越界问题三种情况
if (end1 >= n)
{
end1 = n - 1;
}
if (end1 >= n)
{
end1 = n - 1;
}
if (end1 >= n)
{
end1 = n - 1;
}
for (int j = i; j <= end2; j++)
{
a[j] = tmp[j];
}
}
gap *= 2;
}
free(tmp);
tmp = NULL;
}
八、计数排序
时间复杂度
最坏:-----------O(MAX(N,范围))
最好:-----------O(MAX(N,范围))
平均:-----------O(MAX(N,范围))
空间复杂度
O(范围)
稳定性:不稳定
- 思想:计数排序又称为鸽巢原理,是对哈希直接定址法的变形应用。 操作步骤:
- 统计相同元素出现次数
- 根据统计的结果将序列回收到原来的序列中
动图如下:

- 类似桶排序的思想,如上图,先开辟数组统计数组中某一个数出现的次数,比如2出现1次,3出现两次,那么我们直接按顺序读入开辟的数组,在原数组写1一个2,两个3以此类推……
void CountSort(int* a, int n)
{
int max=a[0], min= a[0];
for (int i = 0; i < n; i++)
{
if (a[i] > max)
{
max = a[i];
}
if (a[i] < min)
{
min = a[i];
}
}
int range = max - min + 1;
int* count = (int*)malloc(sizeof(int) * range);
memset(count, 0, sizeof(int)*range);
for (int i = 0; i < n; i++)
{
count[a[i] - min]++;
}
int j = 0;
for (int i = 0; i < range; i++)
{
while (count[i]--)
{
a[j++] = i + min;
}
}
}
计数排序的特性总结:
计数排序在数据范围集中时,效率很高,但是适用范围及场景有限。
九、各种排序总结比较
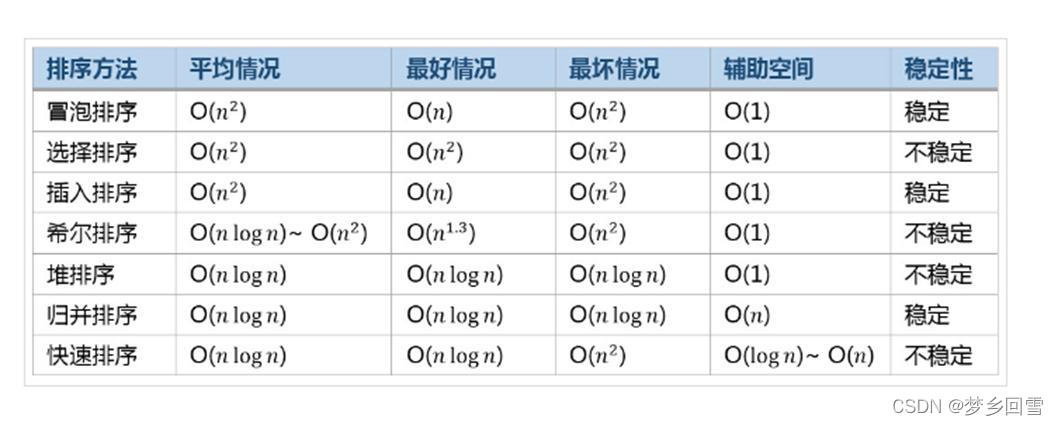
1. 复杂度总结
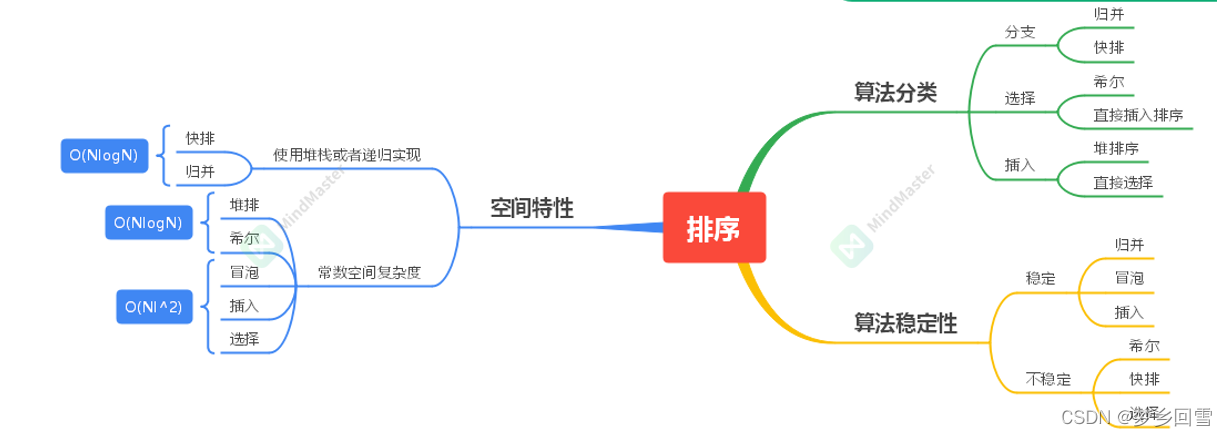
2. 性质分类
总结
以上就是八大排序算法,希望对你有所帮助