写在前面
之前自己写的word丢了,为避免丢失,在网上发一下,主要是备忘,有些表达不严谨请,见谅。
方法和模型图片来自引文:张静.杜剑平.蒋俊,基于球体模型的短波固定多站交叉定位选站方法[j].信息工程大学学报,2020,(1),9-14 26
再吐槽知网:下个论文收费3.5,表示理解;充值最小30,每次下载都要收一遍,手机app上藏得老深了,我就想要张图,有这功夫自己都画出来了。
另外,电脑没在身边,手机码字,写公式不易,转发引用请注明出处。
计算模型
当目标与侧向站不在同一平面时,侧向交叉定位必须考虑地球曲率的影响,将地球看成球体,半径 R = 6731 k m R=6731km R=6731km,考虑到侧向误差远大于地球椭球偏心率影响,简化计算把地球看成正球。此时,侧向交叉定位如图1所示。
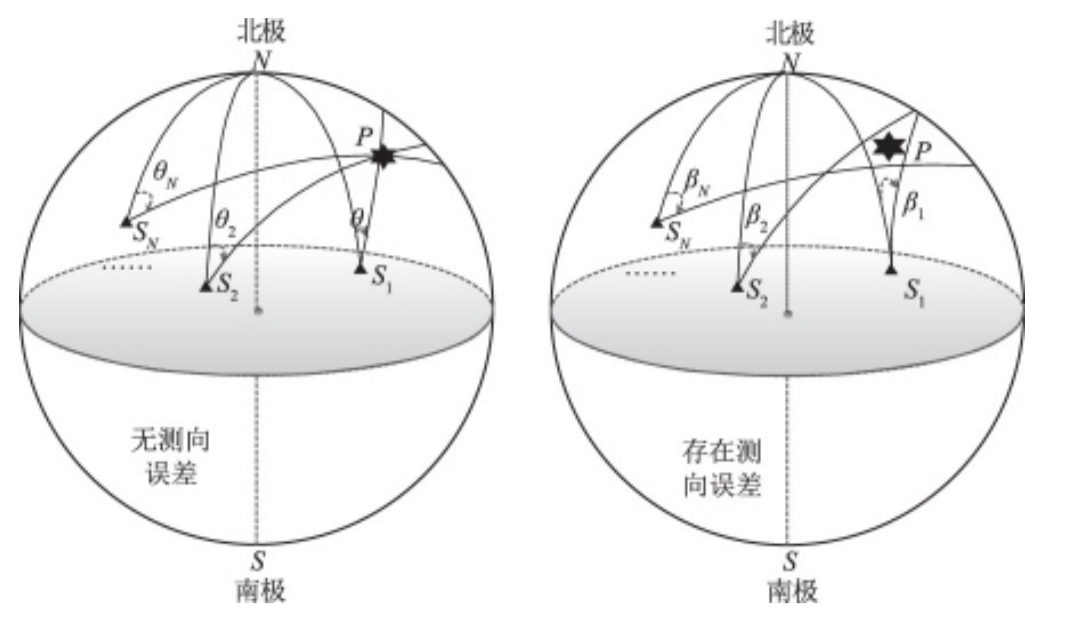
图中
P
(
?
s
,
λ
s
)
P(\phi_s,\lambda_s)
P(?s?,λs?)为辐射源;
S
n
(
?
n
,
λ
n
)
,
n
=
1
,
2
,
3...
S_n(\phi_n,\lambda_n),n=1,2,3...
Sn?(?n?,λn?),n=1,2,3...,为侧向站,
θ
n
\theta_n
θn?为
S
n
S_n
Sn?对
P
P
P的侧向角真实值,
β
n
\beta_n
βn?为测量值。
为便于描述观察模型,建立以球形为原点的空间大地坐标系,用纬度
?
\phi
?,经度
λ
\lambda
λ和大地高
H
H
H来表示空间位置,如图2所示。
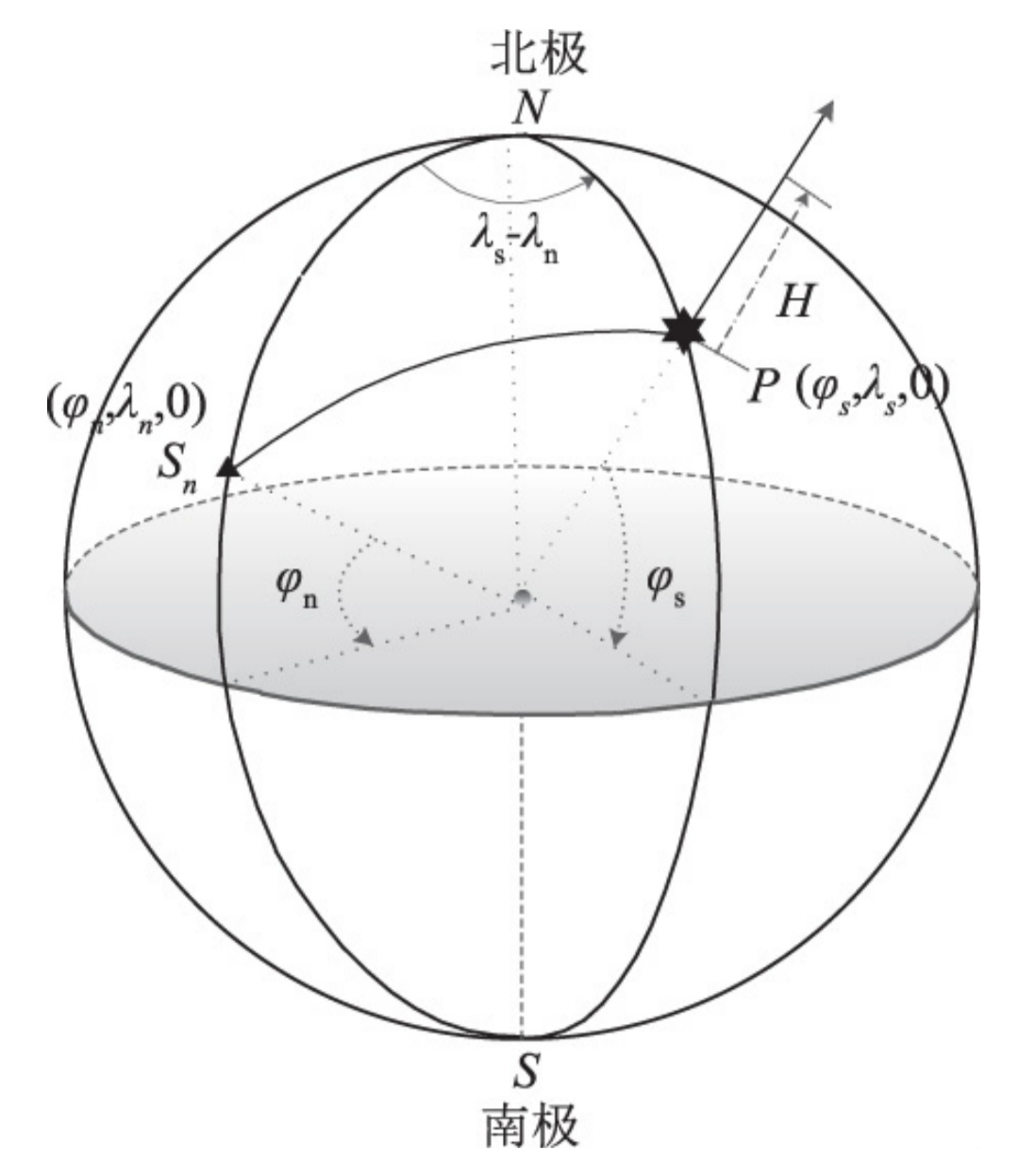
在空间大地坐标系中,
S
n
S_n
Sn?的坐标为
S
n
(
?
n
,
λ
n
,
0
)
,
P
(
?
s
,
λ
s
,
0
)
S_n(\phi_n,\lambda_n,0),P(\phi_s,\lambda_s,0)
Sn?(?n?,λn?,0),P(?s?,λs?,0),两点与北极点形成球面三角形
S
n
N
P
S_nNP
Sn?NP,以
S
n
N
?
,
S
n
P
?
,
N
P
?
\overset{\frown} {S_nN},\overset{\frown} {S_nP},\overset{\frown} {NP}
Sn?N??,Sn?P??,NP?表示球面三角形大圆弧,以球面角
∠
N
S
n
P
,
∠
P
N
S
n
,
∠
N
P
S
n
\angle NS_nP,\angle PNS_n,\angle NPS_n
∠NSn?P,∠PNSn?,∠NPSn?表示球面三角形中的三个角,则由球面三角形的余切定理可得:
cot
?
(
∠
N
S
n
P
)
sin
?
(
∠
P
N
S
n
)
=
cot
?
(
N
P
?
)
sin
?
(
S
n
N
?
)
?
cos
?
(
S
n
N
?
)
cos
?
(
∠
P
N
S
n
)
\cot(\angle NS_nP)\sin(\angle PNS_n)=\cot(\overset{\frown} {NP})\sin(\overset{\frown} {S_nN})-\cos(\overset{\frown} {S_nN})\cos(\angle PNS_n)
cot(∠NSn?P)sin(∠PNSn?)=cot(NP?)sin(Sn?N??)?cos(Sn?N??)cos(∠PNSn?) (1)
由经纬度的定义可知:
{
∠
P
N
S
n
=
λ
s
?
λ
n
S
n
N
?
=
π
2
?
?
n
N
P
?
=
π
2
?
?
s
\left\{ \begin{aligned} \angle PNS_n&=\lambda_s-\lambda_n \\ \overset{\frown} {S_nN}&=\frac \pi 2 - \phi_n \\ \overset{\frown} {NP}&=\frac \pi 2 - \phi_s \\ \end{aligned} \right .
????????????∠PNSn?Sn?N??NP??=λs??λn?=2π???n?=2π???s?? (2)
由侧向角的定义可知:
∠
N
S
n
P
=
θ
n
\angle NS_nP=\theta_n
∠NSn?P=θn? (3)
求解过程
将式(2)(3)代入(1)得:
cot
?
(
θ
)
sin
?
(
λ
s
?
λ
n
)
=
cot
?
(
π
2
?
?
s
)
sin
?
(
π
2
?
?
n
)
?
cos
?
(
π
2
?
?
n
)
cos
?
(
λ
s
?
λ
n
)
\cot(\theta)\sin(\lambda_s-\lambda_n)=\cot(\frac \pi 2 -\phi_s )\sin(\frac \pi 2 - \phi_n) - \cos(\frac \pi 2 - \phi_n)\cos(\lambda_s - \lambda_n)
cot(θ)sin(λs??λn?)=cot(2π???s?)sin(2π???n?)?cos(2π???n?)cos(λs??λn?) (4)
即:
sin
?
θ
n
cos
?
θ
n
=
cos
?
?
s
sin
?
(
λ
s
?
λ
n
)
cos
?
?
n
sin
?
?
s
?
sin
?
?
n
cos
?
?
s
cos
?
(
λ
s
?
λ
n
)
\frac {\sin \theta_n} {\cos \theta_n}=\frac {\cos \phi_s \sin(\lambda_s-\lambda_n)} {\cos \phi_n\sin \phi_s - \sin \phi_n \cos \phi_s \cos(\lambda_s- \lambda_n)}
cosθn?sinθn??=cos?n?sin?s??sin?n?cos?s?cos(λs??λn?)cos?s?sin(λs??λn?)? (5)
和差化积:
sin
?
θ
n
cos
?
θ
n
=
cos
?
?
s
(
sin
?
λ
s
cos
?
λ
n
?
cos
?
λ
s
sin
?
λ
n
)
cos
?
?
n
sin
?
?
s
?
sin
?
?
n
cos
?
?
s
(
cos
?
λ
s
cos
?
λ
n
+
sin
?
λ
s
sin
?
λ
n
)
\frac {\sin \theta_n} {\cos \theta_n}=\frac {\cos \phi_s (\sin \lambda_s \cos \lambda_n - \cos \lambda_s \sin\lambda_n)} {\cos \phi_n\sin \phi_s - \sin \phi_n \cos \phi_s (\cos \lambda_s \cos \lambda_n + \sin \lambda_s \sin\lambda_n)}
cosθn?sinθn??=cos?n?sin?s??sin?n?cos?s?(cosλs?cosλn?+sinλs?sinλn?)cos?s?(sinλs?cosλn??cosλs?sinλn?)? (6)
令已知数:
a
,
b
,
c
,
d
,
e
,
f
=
sin
?
λ
n
,
cos
?
λ
n
,
sin
?
?
n
,
cos
?
?
n
,
sin
?
θ
n
,
cos
?
θ
n
a,b,c,d,e,f=\sin \lambda_n,\cos \lambda_n,\sin \phi_n,\cos \phi_n,\sin \theta_n,\cos \theta_n
a,b,c,d,e,f=sinλn?,cosλn?,sin?n?,cos?n?,sinθn?,cosθn? (7)
令未知数:
x
,
y
,
u
,
v
=
sin
?
λ
s
,
cos
?
λ
s
,
sin
?
?
s
,
cos
?
?
s
x,y,u,v=\sin \lambda_s,\cos \lambda_s,\sin \phi_s,\cos \phi_s
x,y,u,v=sinλs?,cosλs?,sin?s?,cos?s? (8)
将(7)(8)代入(6)简化后得:
e
d
u
=
(
e
c
f
?
f
a
)
v
y
+
(
e
c
a
+
f
b
)
v
x
edu=(ecf - fa)vy+(eca+fb)vx
edu=(ecf?fa)vy+(eca+fb)vx (9)
令已知数:
l
i
=
e
d
,
m
i
=
e
c
b
?
f
a
,
n
i
=
c
a
?
f
b
,
i
=
1
?
o
r
?
2
l_i=ed,m_i=ecb-fa,n_i=ca-fb,i=1\ or\ 2
li?=ed,mi?=ecb?fa,ni?=ca?fb,i=1?or?2(10)
将(10)代入(9)简化后:
l
i
u
=
m
i
v
y
+
n
i
x
l_i u= m_ivy+n_ix
li?u=mi?vy+ni?x (11)
已知两个侧向站的坐标和基本三角公式可联立方程组:
{
l
1
u
=
m
1
v
y
+
n
1
x
l
2
u
=
m
2
v
y
+
n
2
x
1
=
x
2
+
y
2
1
=
u
2
+
v
2
\left\{ \begin{aligned} l_1u &= m_1vy+n_1x \\ l_2u &= m_2vy+n_2x \\ 1 &= x^2+y^2 \\ 1 &= u^2+v^2 \\ \end{aligned} \right .
????????????l1?ul2?u11?=m1?vy+n1?x=m2?vy+n2?x=x2+y2=u2+v2? (12)
令已知数:
A
=
l
1
n
2
?
l
2
n
1
l
2
m
1
?
l
1
m
2
A=\frac {l_1 n_2-l_2 n_1}{l_2m_1-l_1m_2}
A=l2?m1??l1?m2?l1?n2??l2?n1?? (13)
如果
l
2
m
1
?
l
1
m
2
=
0
{l_2m_1-l_1m_2}=0
l2?m1??l1?m2?=0,辐射源经度为0或180度,或者3点在同一经线圆上。
得到2组经度解:
x
=
±
1
A
2
+
1
,
y
=
A
x
x=\pm \sqrt{ \frac 1 {A^2+1}},y=Ax
x=±A2+11??,y=Ax (14)
令已知数:
B
=
m
i
y
+
n
i
x
l
i
B=\frac {m_iy+n_ix}{l_i}
B=li?mi?y+ni?x? (15)
由(14)代入可知B有2个值,已知数,也可以使用1号或者2号侧向站代入计算,避免
l
i
=
0
l_i=0
li?=0,如果
l
1
=
l
2
=
0
l_1=l_2=0
l1?=l2?=0,代表
P
P
P在两极。
得到2组纬度解:
v
=
±
1
B
2
+
1
,
u
=
B
v
v=\pm \sqrt{ \frac 1 {B^2+1}},u=Bv
v=±B2+11??,u=Bv (16)
对应每个
A
A
A有2个解,共4组解。
分别对
(
x
,
y
)
,
(
u
,
v
)
(x,y),(u,v)
(x,y),(u,v)使用atan2函数计算经纬度得到4组经纬度坐标,其中两组纬度坐标不在
[
?
π
2
,
π
2
]
[-\frac \pi 2,\frac \pi 2]
[?2π?,2π?]范围内,剔除后得到两组坐标,是球面上的过心对称点。
是用Haversin函数,分别求两个侧向站到两组坐标的距离,得到4个值,其中最小值就是目标点到其中一个站的最小距离,对应的坐标就是最终目标点
P
(
?
s
,
λ
s
)
P(\phi_s,\lambda_s)
P(?s?,λs?)的坐标。
Python 测试代码
import numpy as np
import math
def get_lmn(s):
lon,lat,az = s
a,b,c,d,e,f = np.sin(lon),np.cos(lon),np.sin(lat),np.cos(lat),np.sin(az),np.cos(az)
return (e*d,e*c*b-f*a,e*c*a+f*b)
def cov2cood(sincos):
claCoord = lambda scsc:(math.atan2(scsc[2],scsc[3]),math.atan2(scsc[0],scsc[1]))
result = [claCoord(sincos[0]),claCoord(sincos[1]),claCoord(sincos[2]),claCoord(sincos[3])]
return np.rad2deg(result)
#在s点在p1,p2 的连线上,没有处理
def cross_location(s1,s2):
'''
目标点为S(xlon,xlat)
点P(lon,lat,az)与S的关系(1)
(1):sin(az)/cos(az) = cos(xlat)sin(xlon-lon)/[cos(lat)sin(xlat)-sin(lat)cos(xlat)cos(xlon-lon)]
令x,y,u,v = sin(xlon),cos(xlon),sin(xlat),cos(xlat)
(1)可将简化为(2):l*u=m*vy+n*vx
两点分别带入(2),得到2个方程
加上(3):u^2+v^2=1,(4):x^2+y^2=1,共4个方程形成的4元2次方程组
令 a = (l1*n2-l2*n1)/(l2*m1-l1*m2)
x=±√(1/(a^2+1)),y=ax
令 b = (m1*y+n1*x)/l2,换成m2,n2,l2也可以
v=±√(1/(b^2+1)),u=bv
得到4组(x,y,u,v)
换算成经纬角(arctan2(x,y),arctan2(u,v)) =>(xlon,xlat)
排除xlat < -pi/2 ,或 xlat > pi/2 ,只剩两组坐标
这两个点是过心对称点
'''
s1 = np.deg2rad(s1)
s2 = np.deg2rad(s2)
l1,m1,n1 = get_lmn(s1)
l2,m2,n2= get_lmn(s2)
if (l2*m1-l1*m2) != 0:
A = (l1*n2-l2*n1)/(l2*m1-l1*m2)
X = np.array([np.sqrt(1/(A**2+1)),-np.sqrt(1/(A**2+1))])
Y = A * X
else:
X = np.array([0,0])
Y = np.array([1,-1])
#防止除0错误
if l1!=0 or l2!=0:
L,M,N = l1,m1,n1
if l1 == 0:
L,M,N = l2,m2,n2
calb = lambda x,y:(M*y+N*x)/L
b0 = calb(X[0],Y[0])
b1 = calb(X[1],Y[1])
V0 = np.array([np.sqrt(1/(b0**2+1)),-np.sqrt(1/(b0**2+1))])
U0 = V0*b0
V1 = np.array([np.sqrt(1/(b1**2+1)),-np.sqrt(1/(b1**2+1))])
U1 = V1*b1
else:
# cos(lat)不会为0 ,不然就az就没有意义只有 sin(az)==0 即az均为 =0 或 180,指向极点
U0=[1,1]
U1=[-1,1]
V0=[0,-0.1]
V1=[0,-0.1]
result = [(U0[0],V0[0],X[0],Y[0]),(U0[1],V0[1],X[0],Y[0]),(U1[0],V1[0],X[1],Y[1]),(U1[1],V1[1],X[1],Y[1])]
result = cov2cood(result)
frsl = []
for i in range(4):
lat = result[i][1]
if lat>= -90 and lat <=90:
frsl.append(result[i])
return np.array(frsl)
def distance_haversine(p1,p2,r=1):
'''
hav(x) = sin(x/2)^2 = (1-cos(x))/2
a(alpha) 两点过心角
hav(a) = hav(lat1-lat2)+cos(lat1)*cos(lat2)*hav(lon1-lon2)
input:
p1:[lon,lat] in degree
p2:[lon,lat] in degree
r:球半径
return:球面距离
'''
p1=np.deg2rad(p1)
p2=np.deg2rad(p2)
hav_lon = math.sin((p1[0]-p2[0])/2)**2
hav_lat = math.sin((p1[1]-p2[1])/2)**2
hav_a = hav_lat + math.cos(p1[1])*math.cos(p2[1])*hav_lon
a = 2*math.atan2(math.sqrt(hav_a),math.sqrt(1-hav_a))
return a*r
def distance_greate_circle(p1,p2,r=1):
'''
使用弦长计算角,求弧长
'''
dpp = distance_chord_line(p1,p2)
#余弦定理求角
a = math.acos((2-dpp**2)/2)
return r*a
def distance_chord_line(p1,p2,r=1):
'''
计算弦长
x= cos(lat)sin(lon)
y= cos(lat)cos(lon)
z= sin(lat)
'''
to_xyz = lambda lon,lat:(math.cos(lat)*math.sin(lon),math.cos(lat)*math.cos(lon),math.sin(lat))
p1=np.deg2rad(p1)
p2=np.deg2rad(p2)
p1 = to_xyz(p1[0],p1[1])
p2 = to_xyz(p2[0],p2[1])
d = (p1[0]-p2[0])**2+(p1[1]-p2[1])**2+(p1[2]-p2[2])**2
d = math.sqrt(d)
return r*d
def pick_nearest_root(s1,s2,roots):
'''
选出离侧向站最近的点
'''
nroot = len(roots)
adist = []
for i in range(nroot):
adist.append(distance_chord_line(s1,roots[i]))
adist.append(distance_chord_line(s2,roots[i]))
minv = math.pi*2
min_i = 0
for i in range(len(adist)) :
if minv > adist[i] :
minv = adist[i]
min_i = i
return roots[min_i//2]
def cross_location_nearest(s1,s2):
roots = cross_location(s1,s2)
return pick_nearest_root(s1[:2],s2[:2],roots)
if __name__ == "__main__":
s1,s2 = [61.1,32.2,120],[52,28.1,33]
print("s1[lon,lat,az] ---------------------------\n",s1)
print("s2[lon,lat,az] ---------------------------\n",s2)
locs = cross_location(s1,s2)
print("roots of equation set[lon,lat] -----------\n",locs)
loc=cross_location_nearest(s1,s2)
print("nearest loaction[lon,lat] ----------------\n",loc)
print("dist to s1 ---------------------------\n",distance_haversine(s1[:2],loc))
print("dist to s2 ---------------------------\n",distance_haversine(s2[:2],loc))