graph_decoder系列(2)

? ? ? ? 承接上文 我们接着来看decoder_node.cpp的代码部分
void GraphDecoder::Init() {
/* initialize subscriber and publisher */
//graph_sub_ 订阅节点/robot_vgraph 其类型是visibility_graph_msg/Graph的消息
graph_sub_ = nh.subscribe("/robot_vgraph", 5, &GraphDecoder::GraphCallBack, this);
graph_pub_ = nh.advertise<visibility_graph_msg::Graph>("decoded_vgraph", 5);
graph_viz_pub_ = nh.advertise<MarkerArray>("/graph_decoder_viz",5);
this->LoadParmas();
save_graph_sub_ = nh.subscribe("/save_file_dir", 5, &GraphDecoder::SaveGraphCallBack, this);
read_graph_sub_ = nh.subscribe("/read_file_dir", 5, &GraphDecoder::ReadGraphCallBack, this);
request_graph_service_ = nh.advertiseService("/request_graph_service", &GraphDecoder::RequestGraphService, this);
robot_id_ = 0;
this->ResetGraph(received_graph_);
}? ? ? ? ?上回说完了GraphCallBack函数 也就是grap_sub_订阅到msg消息以后的回调机制,接着这个?graph_pub_?定义了一个发送节点,他将visibility_graph_msg::Graph类型的消息发送到decoded_vgraph上,我们待会可以看到它的调用。graph_viz_pub_同样的,将MarkerArray发送到/graph_decoder_viz上。
? ? ? ? 接着初始化加载Params? 也就是this->LoadParmas();
void GraphDecoder::LoadParmas() {
const std::string prefix = "/graph_decoder/";
// param(param_name,param_val,param_default_val) 这个param_name必须要在parameter server里能找得到
// /graph_decoder/"world_frame 这个必须要在parameter server里能找得到
/*
在launch里:
<node pkg="graph_decoder" type="graph_decoder" name="graph_decoder" output="screen">
<rosparam command="load" file="$(find graph_decoder)/config/default.yaml" />
<remap from="/planner_nav_graph" to="$(arg graph_topic)"/>
</node>
在launch提到的default.yaml里:
world_frame : map
visual_scale_ratio : 0.5
*/
nh.param<std::string>(prefix + "world_frame", gd_params_.frame_id, "map");
nh.param<float>(prefix + "visual_scale_ratio", gd_params_.viz_scale_ratio, 1.0);
}? ? ? ? 这LoadParam就是在对应的launch里和yaml配置文件里找到相应的param。这么做是为了方便调参,我们改yaml的配置文件即可调整参数。
save_graph_sub_ = nh.subscribe("/save_file_dir", 5, &GraphDecoder::SaveGraphCallBack, this);? ? ? ? 接着,这里定义了一个save_graph_sub_,订阅/save_file_dir,当订阅到信息后,执行它的回调函数SaveGraphCallBack。
? ? ? ? 补充一下:c++中的lambda表达式是c++11引用的最重要的特性之一,它定义了一个匿名函数,可以捕获一定范围的变量在函数内部使用,一般有如下语法形式:
auto func = [capture] (params) opt -> ret { func_body; };一个完整的lambda表达式:
auto func1 = [](int a) -> int { return a + 1; }; auto func2 = [](int a) { return a + 2; }; cout << func1(1) << " " << func2(2) << endl;
? ? ? ? 我们来看看它订阅节点,再看它的回调函数?SaveGraphCallBack:
????????其中,订阅节点在teleop_panel.cpp?中声明了save_publisher_:
save_publisher_ = nh_.advertise<std_msgs::String>( "/save_file_dir", 5 );? ? ? ? 在teleop_panel.cpp?中可以看到保存地图信息的qt button部分的代码:
void TeleopPanel::pressButton4()
{
if ( ros::ok() && velocity_publisher_ )
{
QString qFilename = QFileDialog::getSaveFileName(this, tr("Save File"), "/", tr("VGH - Visibility Graph Files (*.vgh)"));
std::string filename = qFilename.toStdString();
if (filename != "") {
int length = filename.length();
if (length < 4) {
filename += ".vgh";
} else if (filename[length - 4] != '.' || filename[length - 3] != 'v' || filename[length - 2] != 'g' || filename[length - 1] != 'h') {
filename += ".vgh";
}
}
std_msgs::String msg;
msg.data = filename;
save_publisher_.publish(msg);
}
}? ? ? ? 其中就有std_msg::String msg 以及它的data属性
save_publisher_.publish(msg);????????从这里也可以看到save_publisher_它发布了消息。所以SaveGraphCallBack就是来处理这个消息的。我们回到decoder_node.cpp中:
void GraphDecoder::SaveGraphCallBack(const std_msgs::StringConstPtr& msg) {
if (received_graph_.empty()) return; //reveived_graph为空 直接返回
const std::string file_path = msg->data; //把msg中的data提取出来 也就是teleop_panel.cpp中的file_name
if (file_path == "") return; //如果file_path为空 直接返回
std::ofstream graph_file; //定义输出流字节了
graph_file.open(file_path);
// Lambda function
auto OutputPoint3D = [&](const Point3D& p) {
graph_file << std::to_string(p.x) << " ";
graph_file << std::to_string(p.y) << " ";
graph_file << std::to_string(p.z) << " ";
};
for (const auto& node_ptr : received_graph_) {
graph_file << std::to_string(node_ptr->id) << " ";
graph_file << std::to_string(static_cast<int>(node_ptr->free_direct)) << " ";
OutputPoint3D(node_ptr->position);
OutputPoint3D(node_ptr->surf_dirs.first);
OutputPoint3D(node_ptr->surf_dirs.second);
graph_file << std::to_string(static_cast<int>(node_ptr->is_covered)) << " ";
graph_file << std::to_string(static_cast<int>(node_ptr->is_frontier)) << " ";
graph_file << std::to_string(static_cast<int>(node_ptr->is_navpoint)) << " ";
graph_file << std::to_string(static_cast<int>(node_ptr->is_boundary)) << " ";
for (const auto& cidx : node_ptr->connect_idxs) {
graph_file << std::to_string(cidx) << " ";
}
graph_file << "|" << " ";
for (const auto& cidx : node_ptr->poly_idxs) {
graph_file << std::to_string(cidx) << " ";
}
graph_file << "|" << " ";
for (const auto& cidx : node_ptr->contour_idxs) {
graph_file << std::to_string(cidx) << " ";
}
graph_file << "|" << " ";
for (const auto& cidx : node_ptr->traj_idxs) {
graph_file << std::to_string(cidx) << " ";
}
graph_file << "\n";
}
graph_file.close();
}????????我们可以看看它保存的格式 就明白了:
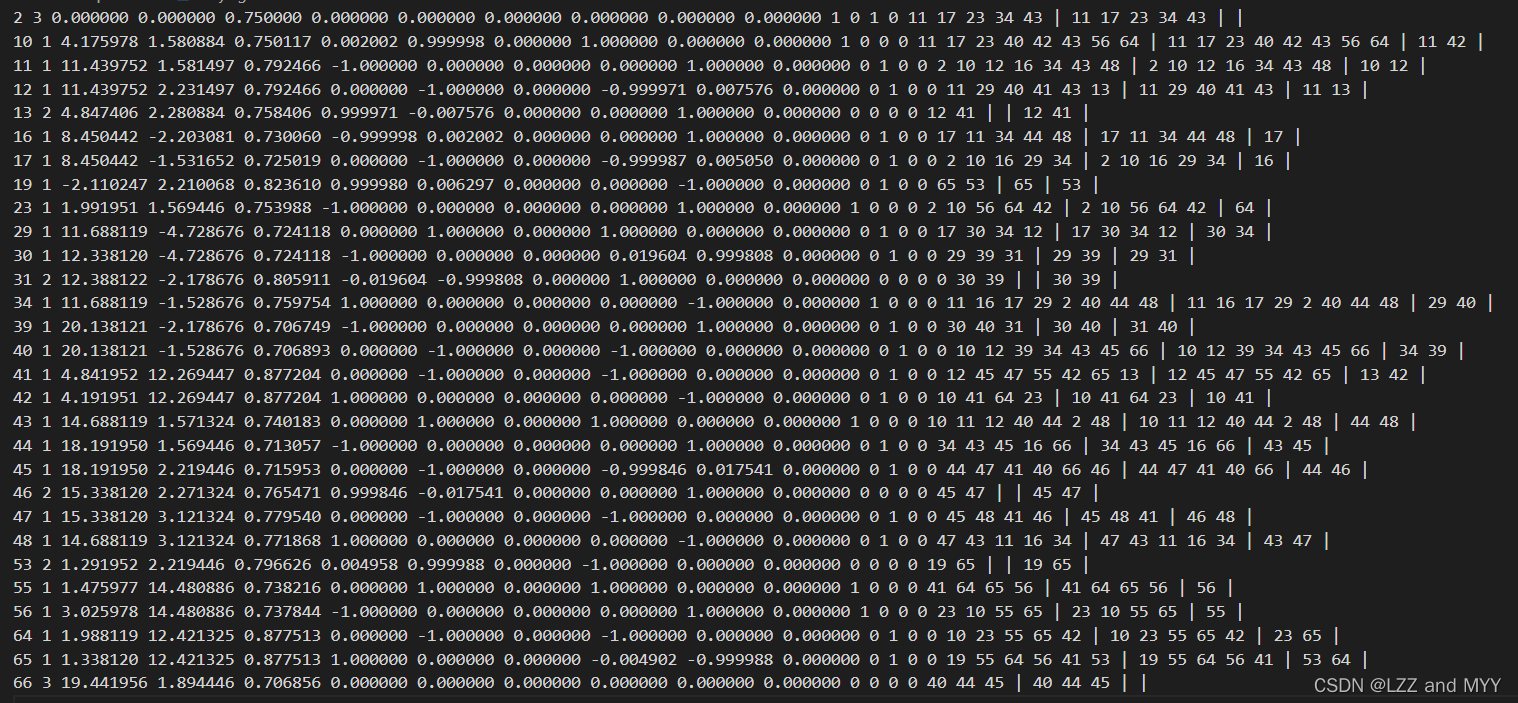
?????????其存下来的格式为:
id?NodeFreeDirect p.x p.y p.z surf_dirs.first.x?surf_dirs.first.y?surf_dirs.first.z?surf_dirs.second.x?surf_dirs.second.y?surf_dirs.second.z is_covered is_frontier is_navpoint is_boundary connect_idx | poly_idx | contour_idx | traj_idx????????SaveGraphCallBack函数这一部分就结束了????
? ?
read_graph_sub_ = nh.subscribe("/read_file_dir", 5, &GraphDecoder::ReadGraphCallBack, this);? ? ? ? 接下来我们来看它订阅的 /read_file_dir ,可以搜到也是从teletop_panel.cpp里写到的:
read_publisher_ = nh_.advertise<std_msgs::String>( "/read_file_dir", 5 );void TeleopPanel::pressButton3()
{
if ( ros::ok() && velocity_publisher_ )
{
QString qFilename = QFileDialog::getOpenFileName(this, tr("Read File"), "/", tr("VGH - Visibility Graph Files (*.vgh)"));
std::string filename = qFilename.toStdString();
std_msgs::String msg;
msg.data = filename;
read_publisher_.publish(msg);
}
}? ? ? ? 我们来看一下它执行的回调函数ReadGraphCallBack
void GraphDecoder::ReadGraphCallBack(const std_msgs::StringConstPtr& msg) {
const std::string file_path = msg->data;
if (file_path == "") return;
std::ifstream graph_file(file_path);
NodePtrStack loaded_graph; //相当于之前的received_graph
std::string str;
std::unordered_map<std::size_t, std::size_t> nodeIdx_idx_map;
std::size_t ic = 0;
NavNodePtr temp_node_ptr = NULL;
loaded_graph.clear();
// 读取vgh里面保存的内容了
while (std::getline(graph_file, str)) {
CreateNavNode(str, temp_node_ptr);
if (AddNodePtrToGraph(temp_node_ptr, loaded_graph)) {
nodeIdx_idx_map.insert({temp_node_ptr->id, ic});
ic ++;
}
}
for (const auto& node_ptr : loaded_graph) { // add connections to nodes
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->connect_idxs, node_ptr->connect_nodes);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->poly_idxs, node_ptr->poly_connects);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->contour_idxs, node_ptr->contour_connects);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->traj_idxs, node_ptr->traj_connects);
}
this->VisualizeGraph(loaded_graph);
visibility_graph_msg::Graph graph_msg;
ConvertGraphToMsg(loaded_graph, graph_msg);
graph_pub_.publish(graph_msg);
}? ? ? ? 我们重点来看读取.vgh里面内容并且把它放进去成为loaded_graph的这个循环:
while (std::getline(graph_file, str)) { 把当前一行行读出来 赋值给str
CreateNavNode(str, temp_node_ptr);
if (AddNodePtrToGraph(temp_node_ptr, loaded_graph)) {
nodeIdx_idx_map.insert({temp_node_ptr->id, ic});
ic ++;
}
}? ? ? ? 这里重载了CreateNavNode函数,他输入的是str和temp_node_ptr。在循环里,str是读到的当前行,我们看看这个CreateNavNode函数:
void GraphDecoder::CreateNavNode(std::string str, NavNodePtr& node_ptr) {
node_ptr = std::make_shared<NavNode>();
std::vector<std::string> components;
std::size_t pos = 0;
std::string delimiter = " "; //分隔符
//pos到达分隔符,把从0-pos的字串读出来,放到c,判断c的长度是否>0
//如果大于0 那么就把c存到components的vector容器里。
//再把str的0到pos+pos + delimiter.length()的部分删掉
//比如 "hei yo" -> "yo"
while ((pos = str.find(delimiter)) != std::string::npos) { //npos表示size_t的最大值
std::string c = str.substr(0, pos);
if (c.length() > 0) {
components.push_back(str.substr(0, pos));
}
str.erase(0, pos + delimiter.length());
}
bool is_connect, is_poly, is_contour;
is_connect = is_poly = is_contour = false;
node_ptr->connect_idxs.clear(), node_ptr->contour_idxs.clear(), node_ptr->traj_idxs.clear();
for (std::size_t i=0; i<components.size(); i++) {
if (i == 0) node_ptr->id = (std::size_t)std::stoi(components[i]);
if (i == 1) node_ptr->free_direct = static_cast<NodeFreeDirect>(std::stoi(components[i]));
// position
if (i == 2) node_ptr->position.x = std::stof(components[i]);
if (i == 3) node_ptr->position.y = std::stof(components[i]);
if (i == 4) node_ptr->position.z = std::stof(components[i]);
// surface direcion first
if (i == 5) node_ptr->surf_dirs.first.x = std::stof(components[i]);
if (i == 6) node_ptr->surf_dirs.first.y = std::stof(components[i]);
if (i == 7) node_ptr->surf_dirs.first.z = std::stof(components[i]);
// surface direction second
if (i == 8) node_ptr->surf_dirs.second.x = std::stof(components[i]);
if (i == 9) node_ptr->surf_dirs.second.y = std::stof(components[i]);
if (i == 10) node_ptr->surf_dirs.second.z = std::stof(components[i]);
// node internal infos
if (i == 11) node_ptr->is_covered = std::stoi(components[i]) == 0 ? false : true;
if (i == 12) node_ptr->is_frontier = std::stoi(components[i]) == 0 ? false : true;
if (i == 13) node_ptr->is_navpoint = std::stoi(components[i]) == 0 ? false : true;
if (i == 14) node_ptr->is_boundary = std::stoi(components[i]) == 0 ? false : true;
if (i > 14 && !is_connect && !is_poly && !is_contour) {
if (components[i] != "|") {
node_ptr->connect_idxs.push_back((std::size_t)std::stoi(components[i]));
} else {
is_connect = true;
}
} else if (i > 14 && is_connect && !is_poly && !is_contour) {
if (components[i] != "|") {
node_ptr->poly_idxs.push_back((std::size_t)std::stoi(components[i]));
} else {
is_poly = true;
}
} else if (i > 14 && is_connect && is_poly && !is_contour) {
if (components[i] != "|") {
node_ptr->contour_idxs.push_back((std::size_t)std::stoi(components[i]));
} else {
is_contour = true;
}
} else if (i > 14 && is_connect && is_poly && is_contour) {
node_ptr->traj_idxs.push_back((std::size_t)std::stoi(components[i]));
}
}
}
????????这样子处理好以后就得到了一个由str?“填充” 好的temp_node_ptr 相当于把一个Navpoint的属性填充好了。接着看while循环里剩下的:
if (AddNodePtrToGraph(temp_node_ptr, loaded_graph)) {
nodeIdx_idx_map.insert({temp_node_ptr->id, ic});
ic ++;
}? ? ? ? 这里面的loaded_graph相当于之前的received_graph,这一部分和GraphCallBack之前的一样。用AddNodePtrToGraph来判断temp_node_ptr是否在loaded_graph里,如果在的话,往nodeIdx_idx_map里插入{id, ic},不同的是它多了个ic++。
? ? ? ? 同时AddNodePtrToGraph本身如果node_ptr非空 也就是上面的temp_node_ptr非空,他会执行操作graphOut.push_back(node_ptr)?也就是把temp_node_ptr添加进loaded_graph。
? ? ? ? 接下来再看ReadGraphCallBack剩下的部分:
for (const auto& node_ptr : loaded_graph) { // add connections to nodes
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->connect_idxs, node_ptr->connect_nodes);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->poly_idxs, node_ptr->poly_connects);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->contour_idxs, node_ptr->contour_connects);
AssignConnectNodes(nodeIdx_idx_map, loaded_graph, node_ptr->traj_idxs, node_ptr->traj_connects);
}
this->VisualizeGraph(loaded_graph);
visibility_graph_msg::Graph graph_msg;
ConvertGraphToMsg(loaded_graph, graph_msg);
graph_pub_.publish(graph_msg);? ? ? ? ?首先是建立node之间的连接 这个和之前一样。然后通过VisualizeGraph函数去画出来。再把loaded_graph转变成graph_msg
? ? ? ? 来看看ConvertGraphToMsg,这里主要是填充了Msg里的header,其中EncodeGraph才是最主要的函数。
//ConvertGraphToMsg 把grap变成graph_msg
inline void ConvertGraphToMsg(const NodePtrStack& graph, visibility_graph_msg::Graph& graph_msg) {
graph_msg.header.frame_id = gd_params_.frame_id;
graph_msg.header.stamp = ros::Time::now();
graph_msg.robot_id = robot_id_;
//这个 EncodeGraph 才是最主要的从graph -> graph_msg
EncodeGraph(graph, graph_msg);
}? ? ? ? 来看看?EncodeGraph
void GraphDecoder::EncodeGraph(const NodePtrStack& graphIn, visibility_graph_msg::Graph& graphOut) {
graphOut.nodes.clear(); //先清空node[]
const std::string frame_id = graphOut.header.frame_id;
// 循环graphIn里的每一个值,赋给node_ptr指针
for (const auto& node_ptr : graphIn) {
//这里面又嵌套了Node消息的内容,所以本质就是 node->graph
//因此graph的消息包含了node
visibility_graph_msg::Node msg_node;
msg_node.header.frame_id = frame_id;
msg_node.position = ToGeoMsgP(node_ptr->position);
msg_node.id = node_ptr->id;
msg_node.FreeType = static_cast<int>(node_ptr->free_direct);
msg_node.is_covered = node_ptr->is_covered;
msg_node.is_frontier = node_ptr->is_frontier;
msg_node.is_navpoint = node_ptr->is_navpoint;
msg_node.is_boundary = node_ptr->is_boundary;
msg_node.surface_dirs.clear();
msg_node.surface_dirs.push_back(ToGeoMsgP(node_ptr->surf_dirs.first));
msg_node.surface_dirs.push_back(ToGeoMsgP(node_ptr->surf_dirs.second));
// Encode connections
msg_node.connect_nodes.clear();
for (const auto& cid : node_ptr->connect_idxs) {
msg_node.connect_nodes.push_back(cid);
}
msg_node.poly_connects.clear();
for (const auto& cid : node_ptr->poly_idxs) {
msg_node.poly_connects.push_back(cid);
}
msg_node.contour_connects.clear();
for (const auto& cid : node_ptr->contour_idxs) {
msg_node.contour_connects.push_back(cid);
}
msg_node.trajectory_connects.clear();
for (const auto& cid : node_ptr->traj_idxs) {
msg_node.trajectory_connects.push_back(cid);
}
graphOut.nodes.push_back(msg_node);
}
graphOut.size = graphOut.nodes.size();
}? ? ? ? 大意就是 传入loaded_graph,目标是解析它,并把它放到graph_msg和node的消息里。
graph_pub_.publish(graph_msg) 最后把graph_msg的消息pub到?decoded_vgraph。
????????read_graph_sub_?这部分也就结束了。