вЛЁЂМђНщ
вЛАуЕФЯпЦЅХфЕФЗНЗЈЗжЮЊСНжж:ЛљгкИіЬхЕФКЭЛљгкаЁзщЕФЁЃМђЕЅРДЫЕОЭЪЧвЛДЮЦЅХфвЛИіЛЙЪЧвЛДЮЦЅХфвЛзщЁЃ
ЖдгкЛљгкИіЬхЕФЦЅХфЗНЗЈ,жївЊЪЧЙтЖШаХЯЂ,етжжЗНЗЈжївЊЖМЪЧЛљгкЦЅХфЕФЯпЖЮжЎМфЖМЛсДцдквЛЖЈЕФжиЕўВПЗжетИіМйЩш,ЕБШЛетИіМйЩшвВЛсШУвЛаЉжиЕўВПЗжВЛзуЕФЯпЖЮЦЅХфЪЇАм,дкетжжЦЅХфЗНЗЈЯТ,вЛДЮЦЅХфСНеХЭМжаЕФвЛЖдЯп,вЛАуЛсРћгУжмЮЇЕФЛЗОГаХЯЂЛђепРћгУжмЮЇЕФЬиеїЕузщГЩЕуЯпЖдНјааЦЅХфЁЃЕБШЛ,дкЕЭЮЦРэГЁОАЯТ,ЛсвђЮЊЬсШЁЕНЕФЬиеїЕуЕФЪ§ФПВЛзуЖјЕМжТЦЅХфаЇЙћЕФЯТНЕ,ЮЪЬтжївЊЛЙЪЧГіЯждкЕуЬсШЁЕФаЇЙћЩЯЁЃ
ЖјЖдгкЛљгкаЁзщЕФЦЅХф,ЪЧгУЯпзщГЩЯпЖд,ЪЧвЛДЮЦЅХфСНеХЭМжаЕФвЛзщЯп,РћгУЕФЪЧЯпзщжЎМфЕФЯрЖдМИКЮЙиЯЕ,АќРЈЯпзщФкВПЕФНЛЕуЁЂНЧЖШвдМАЭЖгАОрРы,РћгУБфЛЛЙ§ГЬжаЕФЯрЖдМИКЮЙиЯЕЕФВЛБфад,ЯрЕБгкРЉеЙСЫЯпЕФЬиеїФкШн,ДгЖјЬсИпЦЅХфаЇЙћЁЃ
етЦЊТлЮФЬсГіЕФЫуЗЈЭЌЪБећКЯСЫЛљгкИіЬхЕФЗНЗЈКЭЛљгкаЁзщЕФЗНЗЈ,ДгЖјШУЦЅХфЕФаЇЙћИќМгГіЩЋЁЃ
ЖўЁЂГѕЪМLJLЦЅХфЖдЕФЩњГЩ
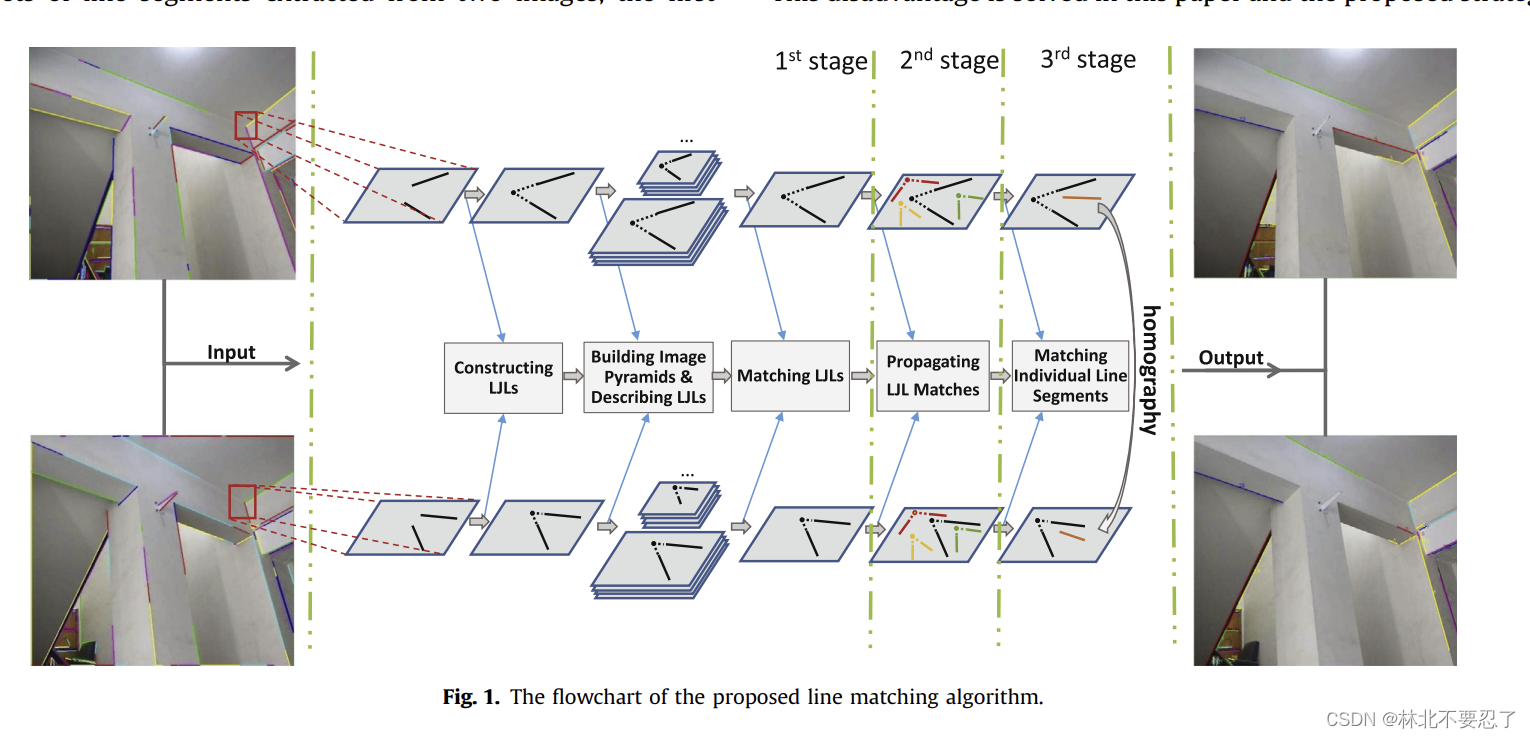
ШЗЖЈСНЬѕЯпдк3dГЁОАЯТЕФЪЧЗёЪЧЙВУцЕФЪЧвЛИіБШНЯРЇФбЕФЮЪЬт,ЕЋЪЧСйНќЕФЯпЖЮгЩгкПеМфЯрЫЦад,ЙВУцЕФПЩФмадУїЯдвЊИп,ЫљвддкетРяТлЮФЬсГіСЫвЛжаРћгУСкНќЧјгђШЅЩИбЁЙВУцЯпЕФЗНЗЈЁЃ
ЖдгквЛЬѕЯп,ТлЮФЙцЖЈСЫвЛИіОиаЮЕФгАЯьЧјгђ,ШчЯТЭМЫљЪО:
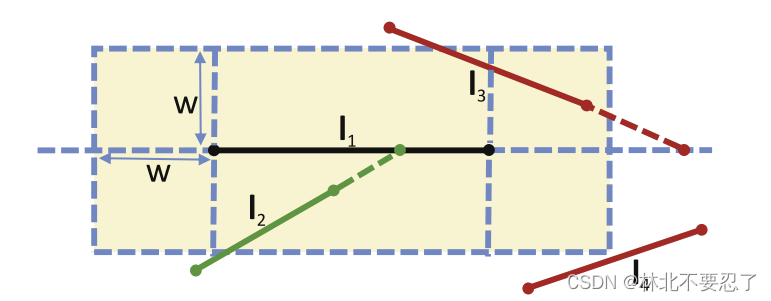
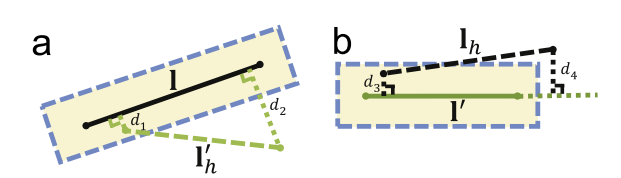
ЖдгквЛЬѕГЄЖШЮЊ|l1|ЕФЯпЖЮl1,вдЦфжаЕуЮЊжааФ,ЙЙНЈвЛИіГЄЮЊ|l1|+2w,ПэЮЊ2wЕФОиаЮЧјгђ,етИіЧјгђОЭБэЪОжБЯпЕФгАЯьЧјгђ,ЖдгкСйНќЕФЯп,ЮвУЧШЯЮЊТњзуЯТУцСНИіЬѕМўЕФЯпЖЮЪЧКЭl1ЙВУцЕФ:
ЂйСйНќЯпЖЮжСЩйгавЛИіЖЫЕуТфдкl1ЕФгАЯьЧјгђФк
ЂкСйНќЯпЖЮгыl1ЕФбгГЄЯпЕФНЛЕуТфдкl1ЕФгАЯьЧјгђФк
ИљОнетСНИіЬѕМў,ЩЯУцЭМжаЕФl2ЖМЗћКЯЬѕМў,ЫљвдШЯЮЊl1l2ЪЧЙВУцЕФ,l3ВЛТњзуНЛЕуЕФЯожЦ,l4ВЛТњзуНЛЕуКЭЖЫЕуЕФЯожЦ,ЫљвдЖМБЛЩсЦњЕєЁЃЖдгкЦЅХфЕФУПЖдЯп,ЖМПЩвдЪгЮЊвЛИіLJLЁЃ
Яждк,ЖдгквбОХаЖЯЮЊЙВУцЕФСНЬѕЯпЖЮ,ЯИЗжжЎЯТПЩвдЗжЮЊСНжжЧщПі:
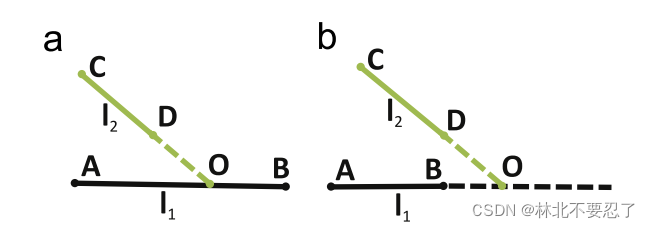
зѓЭМБэЪОНЛЕуЮЛгкСНЬѕЯпЖЮжаЕФвЛЬѕЩЯ,ЖјгвЭМБэЪОНЛЕуТфдкЯпЖЮЕФбгГЄЯпЩЯ,етСНжжЧщПіжа,зѓЭМЕФЧщПіЯТЦфЪЕПЩвдНЋl1В№ПЊ,ЙЙГЩСНИіЖРСЂЕФLJLЁЃ
ЙЙНЈКУLJLЖджЎКѓ,ОЭашвЊгУвЛЖЈЕФУшЪіЗНЗЈШЅУшЪіетИіLJL,УшЪіЕФЗНЗЈгыSIFTЕФУшЪіЗНЗЈРрЫЦ,ФУЩЯЭМжаНЛЕуТфдкбгГЄЯпЩЯЕФЧщПіЮЊР§,ЙЙНЈЯТУцетбљвЛИіЧјгђ:
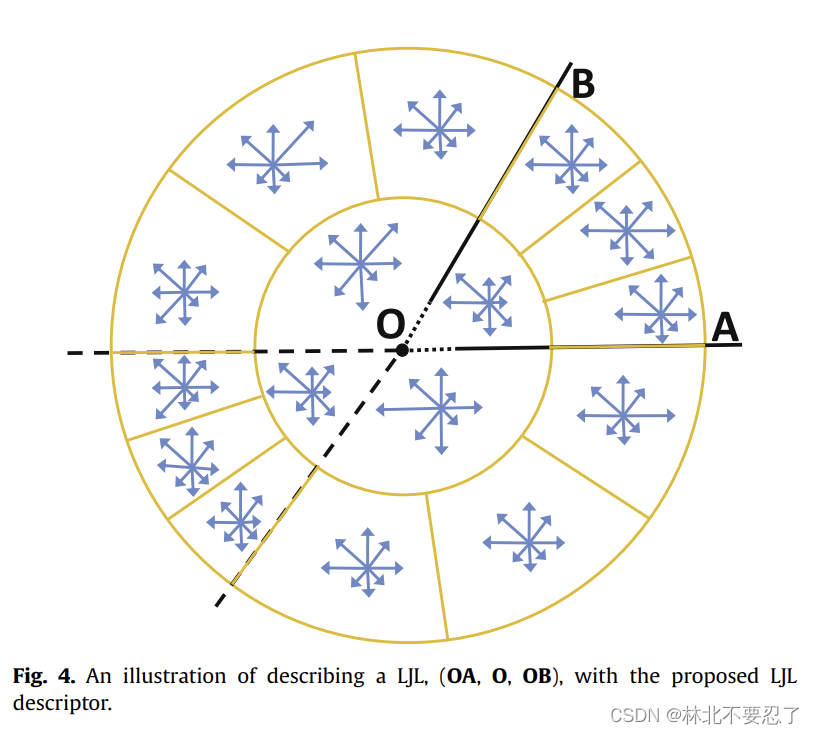
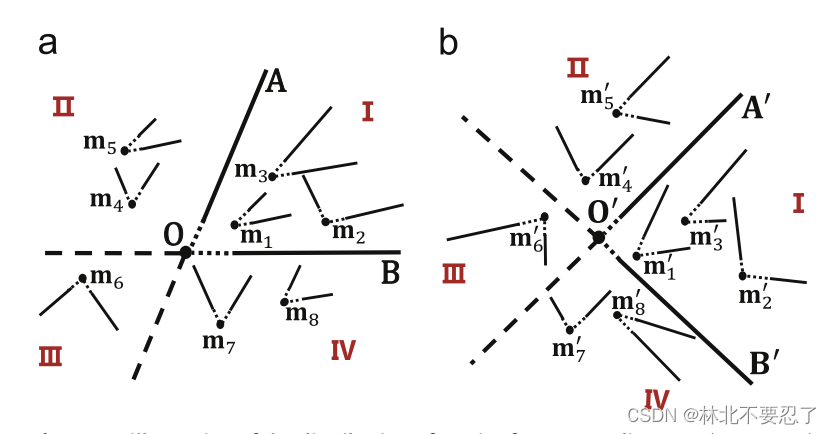
ЪзЯШ,вдНЛЕуoЮЊдВаФ,ЙЙНЈСНИіЭЌаФдВ,ЫћУЧЕФАыОЖЗжБ№ЮЊrКЭ2r,ИљОнСНЬѕЯпЖЮМАЦфбгГЄЯп,ЮвУЧПЩвдНЋетСНИіЭЌаФдВВ№ЗжЮЊАЫИіВПЗж:ФкВПЕФЫФИіЩШаЮЧјгђКЭЭтВПЕФЫФИіЛЗаЭЧјгђ,дйЖдЛЗаЭЧјгђзіЛЎЗж,УПИіЛЗаЮВПЗжВ№ЗжЮЊШ§ВПЗж,етбљзіЕФФПЕФЪЧЮЊСЫШУВ№ЗжКѓУПИіВПЗжЕФУцЛ§гыФкВПЖдгІЕФЩШаЮЧјгђЕФУцЛ§ЯрЕШЁЃ
ОЙ§ЛЎЗжжЎКѓ,ЮвУЧвЛЙВЕУЕНСЫ16ИіЧјгђ,НгЯТРДЖдгкУПИіЧјгђ,МЦЫуТфШыЦфжаЕФЯёЫиЕФЬнЖШЗНЯђКЭЬнЖШжЕ,НЋЬнЖШжЕИљОнЬнЖШЗНЯђ,В№ЗжЕНАЫИіЬнЖШЩЯ,РлЛ§жЎКѓЕУЕНСЫетИіЧјгђФкВПАЫИіЬнЖШЗНЯђЩЯЕФЬнЖШжЕ,вВОЭЪЧЫЕвЛИіЧјгђОЭашвЊгУАЫИіЪ§жЕНјааУшЪі,ЫљвдЖдгквЛИіLJLРДЫЕ,змЙВашвЊ128ИіжЕ,вВОЭЪЧвЛИі128ЮЌЕФЯђСПШЅУшЪіЁЃ
ДЫЭт,ДгетИіУшЪіЗНЗЈРДПДвВФмПДГі,ЕБНЛЕуТфдкСНЬѕЯпЖЮжаЕФвЛЬѕЩЯЕФЪБКђ,ОЭУЛгаАьЗЈжБНгШЅАДееетжжУшЪіЗНЗЈНјааУшЪі,ЫљвдТлЮФЫЕСЫвЊНЋСНИіВПЗжВ№ПЊШЅУшЪіЁЃ
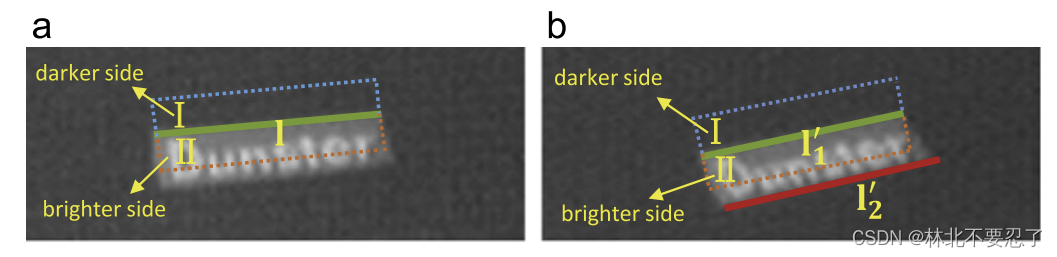
УшЪіКУжЎКѓОЭПЩвдНјааГѕВНЕФЦЅХф,ЪзЯШ,ЖдгкСНИіе§ШЗЦЅХфЕФLJLЖд,ЦфНЛВцНЧВЛгІИУгаЬЋДѓЕФЦЋВю,вВОЭЪЧЫЕЩЯЭМжаЁЯAOBдкСНеХЭМжаЦЋВюВЛФмЬЋДѓ,ЦЋВюЬЋДѓЕФОЭБЛЩсЦњЕєЁЃ
НЧЖШЕФЩИбЁжЎКѓ,ОЭНјШыУшЪізгОрРыЕФЩИбЁЁЃгЩгкLJLЪЧвЛИіЛљгкЙЬЖЈДѓаЁДАПкШЅЙЙНЈЕФ,ЫљвдУЛгаАьЗЈДІРэГпЖШБфЛЏ,вђДЫдкМЦЫуУшЪізгОрРыЕФЪБКђ,ашвЊШЅВЩгУвЛЖЈЕФЗНЗЈУжВЙГпЖШБфЛЏЁЃТлЮФЪЙгУИпЫЙН№зжЫўЕФЗНЗЈ,НЈСЂСЫЫФВуЕФИпЫЙН№зжЫў,УПВуАќРЈСНИізгВу,жЎКѓ,БЉСІЦЅХфетСНеХЭМжаLJLЕФАЫВуУшЪізгОрРы:
ШЁЦфжаЕФзюаЁжЕзїЮЊСНИіLJLЖдЕФУшЪізгОрРыЁЃВЛФбПДГі,етИіЗНЗЈКЭLBDЕФЗНЗЈЪЧРрЫЦЕФ,жївЊЪЧвђЮЊУшЪізгЕФУшЪіЗНЗЈВЛжЇГжГпЖШБфЛЏ,ЫљвдВЩгУИпЫЙН№зжЫўШЅШЫЮЊФЃЗТГпЖШБфЛЏ,ЭЈЙ§ПчВуЕФОрРыМЦЫу,РДБэЪОЛжИДЕНЭЌвЛИіГпЖШЯТжЎКѓЕФУшЪізгОрРы,ДгЖјШУМЦЫуНсЙћИќМгзМШЗЁЃ
ЖдгкМЦЫуКУЕФУшЪізгОрРы,вЛАуШЯЮЊаЁгквЛЖЈуажЕЕФLJLЖдЪЧКђбЁЦЅХфЕФЁЃ
Ш§ЁЂLJLЕФРЉеЙЦЅХф
ОЙ§ЩЯвЛВН,ЮвУЧЕУЕНСЫLJLЕФКђбЁЦЅХфЖд,етЦфжаДцдквЛаЉЮѓЦЅХф,вВДцдквЛаЉЦЅХфЕФЕЋЪЧУЛгаМгШыНјШЅЕФ,ашвЊНјвЛВННјааДІРэЁЃ
ЪзЯШ,ЮвУЧЪЙгУRANSACШЅЬсГіКђбЁЦЅХфЖджаЕФЮѓЦЅХфЁЃ
жЎКѓ,ТлЮФЬсГіСЫвЛжжЭиЦЫЗжВМЕФЯожЦШЅНјвЛВНЩИбЁ,ЖдгквЛЖдLJL,ЦфЯпЖЮЕФНЛЕуЮЊOКЭOЁЎ,ЖдгкжмЮЇЕФLJL,МЦЫуНЛЕуЕНOКЭOЁЏЕФОрРы,ШЁЦфжазюНќЕФnИіLJLЕФНЛЕу,МЧЮЊMКЭMЁЎ,Ждгке§ШЗЦЅХфЕФLJLЖд,гІИУТњзуЯТУцСНИівЊЧѓ:
ЂйMКЭMЁЏЕФжиЕўВПЗжЕФБШР§гІИУДѓгквЛЖЈЕФуажЕ,вВОЭЪЧЫЕ,OКЭOЁЏИННќЕФLJLгІИУБЃГжвЛЖЈЕФЦЅХфЙиЯЕ
ЂквбОЦЅХфЕФLJLЕФНЛЕугІИУгаНЯДѓБШР§ТфдкД§МьВтЕФLJLЕФЭЌвЛИіЯѓЯоРя
ПЩвдПДГі,вЛИіLJLЯрЕБгкНЋећИіЖўЮЌПеМфЛЎЗжГЩСЫЫФВПЗж,ЩЯУцЕФСНИівЊЧѓЪЧЫЕ,ЪзЯШOИННќЕФЕуКЭOЁЏИННќЕФЕуБиаыБЃжЄгаЦЅХфЕФНЛЕу,СэЭтвЛИіЪЧЫЕЦЅХфЕФНЛЕуТфдкЫФИіЯѓЯоБиаыЪЧБЃГжвЛжТЕФЁЃ
ОЙ§RANSACжЎКѓ,ЮвУЧЯждкЯрЕБгкЕУЕНСЫШ§ВПЗжЕФLJL,ЪзЯШЪЧвбОЦЅХфЕФLJLЖд,етВПЗжМЧЮЊML,ЪЃЯТЕФВЛЦЅХфЕФLJLИљОнЭМЕФРДдД,ЗжЮЊULКЭULЁЏ,ЯждкЮвУЧдкРЉеЙЦЅХфЕФЙ§ГЬжа,ОЭЪЧвЊЬэМгПЩФмБЛКіТдЕФ,ЭЌЪБЩИШЅЮѓЦЅХфЕФЁЃ
ЪзЯШгУБЉСІЦЅХфЕФЗНЗЈ,евГіULКЭULЁЏжаЗћКЯЬѕМўЕФЧБдкЦЅХф,ЬѕМўгаШ§Иі:
ЂйНЛЕуЕНМЋЯпЕФОрРыгІИУаЁгкуажЕ
ЂкУшЪізгОрРывЊаЁгкуажЕ
ЂлТњзуЩЯУцНщЩмЕФЭиЦЫЗжВМЕФЯожЦ
ТњзуетШ§ИіЬѕМўЕФLJLЖд,ОЭЛсБЛЕБзїКђбЁЖдМгШыЕНMLжа,етПЩФмЛсЕМжТMLжавЛаЉдРДЗћКЯЭиЦЫЗжВМЯожЦЕФLJLЖдЯждкВЛЗћКЯСЫ,ФЧУДОЭашвЊНЋЫћУЧДгMLжаЬоГ§ЁЃ
жиИДетИіВйзї,жБЕНУЛгааТЕФLJLМгШыMLЛђепЕќДњЕФДЮЪ§ГЌЙ§СЫЮхДЮЁЃОЙ§етВПЗжЕФРЉеЙЦЅХф,ЮвУЧЯрЕБгкгжвЛДЮЩИбЁСЫЮѓЦЅХф,ЖјЧвНЋвЛаЉТфЯТЕФLJLЦЅХфЖдИјевСЫЛиРДЁЃжСДЫЛљгкаЁзщЕФЦЅХфОЭНсЪјСЫ,КѓУцзЊЖјНјааЛљгкИіЬхЕФЦЅХфЁЃ
ЫФЁЂЛљгкИіЬхЕФЯпЖЮЦЅХф
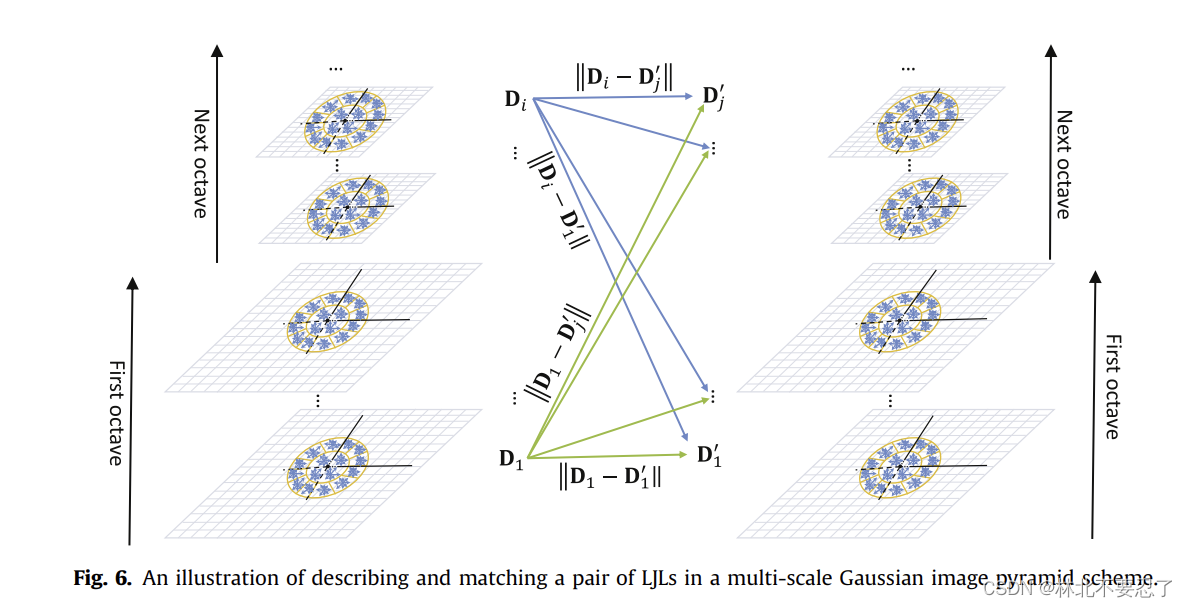
етВПЗжжївЊЪЧеыЖдФЧаЉЙЙВЛГЩLJLЕФЯпЖЮ,КѓУцЮвМђГЦЮЊЙТЯп,ЖдгквЛЬѕЙТЯп,ВщевЫљдкЭМжмЮЇЕФвбОЦЅХфЕФLJL,МЦЫуLJLЕФНЛЕуЕНЙТЯпЕФОрРы,ИљОнОрРы,ЩИбЁзюНќЕФuИіLJL,НЋетаЉЙТЯпЛЎЗжЕНетuИіLJLЕФЗЖЮЇЯТ,АДееетжжЛЎЗжЗНЪН,вЛеХЭМжаЫљгаЕФЦЅХфЕФLJLЖМПЩвдЗжХфЕН0ИіЕНЖрИіЙТЯпЁЃ
жЎКѓ,ЖдгкУПИівбОЦЅХфЕФLJL,ЮвУЧвЊЖдТфШыЦфЪЦСІЗЖЮЇФкЕФЙТЯпдйзівЛДЮЛЎЗж,ЧАУцЬсЕНСЫИљОнНЛЕуКЭСНЬѕЯпЖЮ,вЛИіLJLЯрЕБгкБЛВ№ЗжГЩСЫЫФИіРрзјБъЯЕЕФЧјгђ,Яждк,ЖдгкдквЛИіLJLЧјгђФквЛЬѕЙТЯп,ШчЙћЫќЕФСНИіЖЫЕуЖМТфдкСЫЧјгђФкЕФвЛИіЯѓЯо,ФЧУДОЭНЋетЬѕЙТЯпЗжХфЕНетИіЯѓЯоРя,вВОЭЪЧЯТУцЕФБэЪО:


ЩЯУцЕФqБэЪОЕФЪЧЕкМИИіЯѓЯо,ЖјnКЭmдђБэЪОЪЧЕкМИИіLJL,ЯждкЖдгквбОЛЎЗжКУЕФЙТЯп,ЮвУЧвЊНшжњСйНќЕФLJLРДНјааЙТЯпЕФЦЅХф,ЕБШЛ,жЛгадкЭЌвЛИіЦЅХфЕФLJLЕФЭЌвЛИіЧјгђФкВХФмНјааЦЅХфЕФМьВт,вВОЭЪЧЕБm=nЧвq=pЕФЧщПіЯТ,ВХЛсМьВтСНЬѕЙТЯпЪЧЗёЪЧЦЅХфЕФЁЃ
МьВтСНЬѕЙТЯпЪЧЗёЦЅХфЪзЯШЪЧвЊМьВта§зЊНЧЖШ,вВОЭЪЧБШНЯЙТЯпЕФНЧЖШБфЛЏЁЂLJLжаСНЬѕЯпЕФНЧЖШБфЛЏетШ§ИіНЧЖШЕФВюОр:
ТњзуЩЯУцЬѕМўдђШЯЮЊЭЈЙ§СЫНЧЖШЕФЯожЦ,жЎКѓРћгУЕЅгІОиеѓНјааЩИбЁЁЃЙигкЕЅгІОиеѓЕФМЦЫу,вВОЭЪЧТлЮФЕФ4.2Нк,ШЋЪЧЪ§бЇЙЋЪН,етРяВЛдйМЧТМСЫ,жБНггУИјГіЕФМЦЫуЗНЗЈРДМЦЫуЕЅгІОиеѓЁЃ
дкSLAMЪЎЫФНВРяУцвВгаЬсЕН,ЕЅгІОиеѓЪЧдкДцдкДѓСПЙВУцЕФЕуЕФЪБКђВХМЦЫуЕФОиеѓ,ЦНЪБЧщПіЯТМЦЫуЕФЪЧЛљДЁОиеѓЛђепЙиМќОиеѓ,ТлЮФТлЪіСЫвЛЯТЪЙгУЕЅгІОиеѓШЅМьВтКЯРэад,ЪзЯШЮвУЧдкЗжХфЪБРћгУСЫПеМфЕФОжВПЯрЫЦад,ДгЖјБЃжЄСЫLJLЕФСНЬѕЯпКЭЙТЯпетШ§ЬѕЯпгаКмДѓЕФИХТЪЪЧЙВУцЕФ,ЦфДЮ,ЮвУЧЛЎЗжЪБВЂВЛЪЧвЛЖдвЛЕФЗжХф,ЖјЪЧвЛЬѕЙТЯпЗжХфИјСЫШ§ИіLJL,ВЩгУетИіЗНЗЈвВПЩвдКмДѓГЬЖШЩЯБЃжЄЙВУцЕФЯпВЛБЛЮѓЗжХфЁЃ
ЛиЕНМьВтБОЩэ,ЖдгквЛЖдЙТЯп,ШчЙћЪЧЦЅХфЕФ,ИљОнЕЅгІОиеѓДІРэЖЫЕу,ЭЖгАЧАКѓЕФЙиЯЕгІИУЪЧБЃГжНЯаЁЮѓВюЕФ,ОпЬхРДЫЕЪзЯШЪЧМьВтЭЖгАЕуЕФЮЛжУ,ИљОнЕЅгІОиеѓ,НЋСНЬѕЙТЯпЕФЖЫЕуЭЖгАЕНСэвЛеХЭМЩЯ,ШЛКѓПДЙТЯпЕФгАЯьЧјгђ,ЩИЕєЭЖгАКѓгыгАЯьЧјгђУЛгаНЛЕуЕФЙТЯпЁЃЖдгкБЃСєЯТРДЕФЙТЯпЖд,МЦЫуОрРыЦЋВю:
гЩгкдкЙТЯпЦЅХфЙ§ГЬжа,МЋШнвзГіЯжЯрСкЕФЦНааЯпЮѓЦЅХфЕФЧщПі,вВОЭЪЧЯТЭМЫљЪОЕФЧщПі:
ЖдгкетжжЧщПі,ТлЮФв§ШыСЫЯпЕФВрЕФИХФю,вВОЭЪЧМЦЫуЙТЯпСНВрЕФЦНОљЛвЖШжЕ,гЩДЫРДжИЖЈЯпЕФСНЖЫ,ДгЖјдкЦЅХфЕФЪБКђОЭПЩвдЯћГ§СйНќЦНааЯпВњЩњЕФгАЯьЁЃ
ОЙ§ЩЯУцЕФВНжш,ЦЅХфЕФЙТЯпРяУцПЩФмЛсДцдкжиИДЦЅХф,етЪБКђОЭгУЩЯЧАУцМЦЫуЕФОрРыЦЋВюжЕE,бЁдёЦЋВюжЕзюаЁЕФЙТЯпЖд,ЩИГ§ЕєЦфгрЕФЙТЯпЖдЁЃ