гХЛЏЙЄОпАќЁЊЮодМЪјЗЧЯпадгХЛЏЧѓНтЦї(fminsearch)
дДДВЛвз,ТЗЙ§ЕФИїЮЛДѓРаЧыЕуИідо
ФПТМ
fminsearchКЏЪ§:ЧѓЮодМЪјЖрБфСПКЏЪ§ЕФзюаЁжЕ
ЯрБШfminunc(ЭЌбљвВЪЧЧѓЮодМЪјЖрБфСПКЏЪ§ЕФзюаЁжЕ),fminsearchЪЙгУЮоЕМЪ§ЗЈМЦЫузюаЁжЕ
вЛЁЂfminuncзмЬхНщЩм
гяЗЈ:
x = fminsearch(fun,x0)
x = fminsearch(fun,x0,options)
x = fminsearch(problem)
[x,fval] = fminsearch(___)
[x,fval,exitflag] = fminsearch(___)
[x,fval,exitflag,output] = fminsearch(___)
ЫЕУї:
ЗЧЯпадЙцЛЎЧѓНтЦїЁЃЫбЫїгЩвдЯТЙЋЪНжИЖЈЕФЮЪЬтЕФзюаЁжЕ:
min
?
x
f
(
x
)
\min_xf(x)
xmin?f(x)
f
(
x
)
f(x)
f(x)ЪЧЗЕЛиБъСПЕФКЏЪ§,
x
x
xЪЧЯђСПЛђОиеѓ;fminsearchЧѓНтЦїУцЯђЖрБфСПКЏЪ§;fminsearchЪЪгУгкЮодМЪјЗЧЯпадЮЪЬтЁЃШчЙћашвЊгХЛЏЕФЮЪЬтгадМЪј,ЭЈГЃЪЙгУ fminconЁЃ
ЯрБШfminunc(ЭЌбљвВЪЧЧѓЮодМЪјЖрБфСПКЏЪ§ЕФзюаЁжЕ),fminsearchЪЙгУЮоЕМЪ§ЗЈМЦЫузюаЁжЕ
x = fminsearch(fun,x0) дкЕу x0 ДІПЊЪМВЂГЂЪдЧѓ fun жаУшЪіЕФКЏЪ§ЕФОжВПзюаЁжЕ xЁЃ
ЖўЁЂfminsearchЧѓНтЦїЕФОпЬхгУЗЈ
ЯТУцОпЬхНщЩмfminuncЧѓНтЦїЕФгУЗЈ
1)x = fminsearch(fun,x0) дкЕу x0 ДІПЊЪМВЂГЂЪдЧѓ fun жаУшЪіЕФКЏЪ§ЕФОжВПзюаЁжЕ x;
2)x = fminsearch(fun,x0,options) ЪЙгУ options ЫљжИЖЈЕФгХЛЏбЁЯюжДаазюаЁЛЏЁЃЪЙгУ optimset ПЩЩшжУетаЉбЁЯюЁЃ;
3)x = fminsearch(problem) Чѓ problem ЕФзюаЁжЕ,ЫќЪЧ problem жаЫљЪіЕФвЛИіНсЙЙЬх;
4)[x,fval] = fminsearch(___),ЖдШЮКЮЩЯЪіЪфШыгяЗЈ,дк fval жаЗЕЛиФПБъКЏЪ§ fun дкНт x ДІЕФжЕЁЃ
5)[x,fval,exitflag] = fminsearch(___) ЛЙЗЕЛиУшЪіЭЫГіЬѕМўЕФжЕ exitflagЁЃ
6)[x,fval,exitflag,output] = fminsearch(___) ЛЙЛсЗЕЛиНсЙЙЬх output вдМАгаЙигХЛЏЙ§ГЬЕФаХЯЂЁЃ
Ш§ЁЂОйР§:МЦЫу Rosenbrock КЏЪ§ЕФзюаЁжЕ
МЦЫу Rosenbrock КЏЪ§ЕФзюаЁжЕ,ЖдгкаэЖрЫуЗЈРДЫЕ,етЪЧМЋФбЕФгХЛЏЮЪЬт:
RosenbrockФПБъКЏЪ§:
f
(
x
)
=
100
(
x
2
?
x
1
2
)
2
+
(
1
?
x
1
)
2
f(\bm{x})=100(x_2-x_1^2)^2+(1-x_1)^2
f(x)=100(x2??x12?)2+(1?x1?)2
Цфжа
x
=
[
x
1
,
x
2
]
x=[x_1,x_2]
x=[x1?,x2?]ЮЊвЛИіЖўЮЌЯђСПЁЃ
ИУКЏЪ§ЕФзюаЁжЕдк
x
=
[
1
,
1
]
\bm{x}=[1,1]
x=[1,1]ДІ,зюаЁжЕЮЊ0;
ЯТУцЮвУЧНЋГѕЪМЕуЩшЮЊ
x
0
=
[
?
1.2
,
1
]
x_0 = [-1.2,1]
x0?=[?1.2,1],ЪЙгУ fminsearchКЏЪ§ЧѓНт
ДњТы:
fun = @(x)100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
x0 = [-1.2,1];
x = fminsearch(fun,x0)
ЧѓНтНсЙћ:
x = 1ЁС2
1.0000 1.0000
ЫФЁЂЩшжУбЁЯю:МрЪггХЛЏЙ§ГЬ/МьВщгХЛЏЙ§ГЬ
4.1 МрЪггХЛЏЙ§ГЬ
ЩшжУбЁЯю,вдМрЪг fminsearch ГЂЪдЖЈЮЛзюаЁжЕЕФЙ§ГЬЁЃ
ЩшжУбЁЯю,вддкУПДЮЕќДњЪБЛцжЦФПБъКЏЪ§ЭМЁЃ
options = optimset(ЁЎPlotFcnsЁЏ,@optimplotfval);
НЋФПБъКЏЪ§ЩшжУЮЊ Rosenbrock КЏЪ§,
f
(
x
)
=
100
(
x
2
?
x
1
2
)
2
+
(
1
?
x
1
)
2
f(\bm{x})=100(x_2-x_1^2)^2+(1-x_1)^2
f(x)=100(x2??x12?)2+(1?x1?)2
НЋЦ№ЪМЕуЩшжУЮЊ
x
0
=
[
?
1.2
,
1
]
x_0 = [-1.2,1]
x0?=[?1.2,1] ВЂЪЙгУ fminsearch МЦЫу Rosenbrock КЏЪ§ЕФзюаЁжЕЁЃ
fun = @(x)100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
x0 = [-1.2,1];
x = fminsearch(fun,x0,options)
НсЙћЮЊ:
x = 1ЁС2
1.0000 1.0000
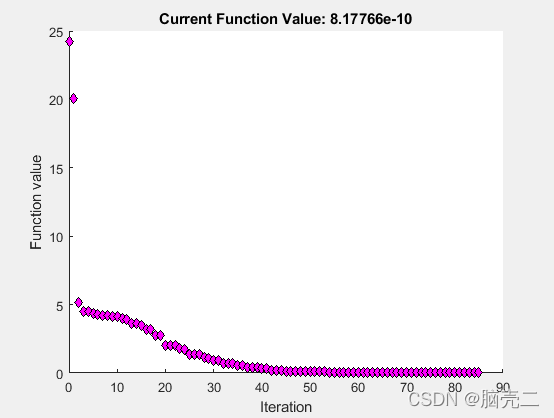
4.2 МьВщгХЛЏЙ§ГЬ
дкгХЛЏНјааЦкМфКЭгХЛЏНсЪјКѓМьВщгХЛЏНсЙћЁЃ
НЋбЁЯюЩшжУЮЊЬсЙЉЕќДњЪфГі,ДгЖјдкЧѓНтЦїдЫааЪБЬсЙЉгаЙигХЛЏЕФаХЯЂЁЃДЫЭт,НЋЛцЭМКЏЪ§ЩшжУЮЊдкЧѓНтЦїдЫааЪБЯдЪОФПБъКЏЪ§жЕЁЃ
options = optimset(ЁЎDisplayЁЏ,ЁЎiterЁЏ,ЁЎPlotFcnsЁЏ,@optimplotfval);
ЩшжУФПБъКЏЪ§КЭЦ№ЪМЕуЁЃ
function f = objectivefcn1(x)
f = 0;
for k = -10:10
f = f + exp(-(x(1)-x(2))^2 - 2*x(1)^2)*cos(x(2))*sin(2*x(2));
end
НЋ objectivefcn1 ЕФДњТызїЮЊЮФМўАќКЌдкФњЕФ MATLAB? ТЗОЖжа
x0 = [0.25,-0.25];
fun = @objectivefcn1;
ЛёШЁЫљгаЧѓНтЦїЪфГіЁЃдкЧѓНтЦїдЫааЭъБЯКѓ,ЪЙгУетаЉЪфГіМьВщНсЙћЁЃ
[x,fval,exitflag,output] = fminsearch(fun,x0,options)
ОпЬхНсЙћЯдЪОВЛНиЭМСЫ
ЩшжУбЁЯюoptions ЕФЯИНкМћЕкСљНк
ЮхЁЂОпгаЖюЭтВЮЪ§ЪБЧѓзюаЁжЕ
гаЪБФњЕФФПБъКЏЪ§ОпгаЖюЭтВЮЪ§ЁЃетаЉВЮЪ§ВЛЪЧвЊгХЛЏЕФБфСП,ЫќУЧЪЧгХЛЏЙ§ГЬжаЕФЙЬЖЈжЕЁЃР§Шч,МйЩшФњдквдЯТ Rosenbrock РраЭКЏЪ§жагавЛИіВЮЪ§ a:
f ( x , a ) = 100 ( x 2 ? x 1 2 ) 2 + ( a ? x 1 ) 2 f(\bm{x},a)=100(x_2-x_1^2)^2+(a-x_1)^2 f(x,a)=100(x2??x12?)2+(a?x1?)2
ДЫКЏЪ§дк x 1 = a x_1=a x1?=a, x 2 = a 2 x_2=a^2 x2?=a2ДІОпгазюаЁжЕ 0ЁЃ
МйШч a = 3 a=3 a=3,ДДНЈФфУћКЏЪ§НЋИУВЮЪ§АќКЌдкДДНЈЕФФПБъКЏЪ§жаЁЃ
f = @(x,a)100*(x(2) - x(1)^2)^2 + (a-x(1))^2;
НЋВЮЪ§ЗХдкФњЕФ MATLAB? ЙЄзїЧјжа,МД
a=3
ЕЅЖРДДНЈАќКЌВЮЪ§ЕФЙЄзїЧјжЕЕФ x ЕФФфУћКЏЪ§ЁЃ
fun = @(x)f(x,a);
дк x 0 = [ ? 1 , 1.9 ] x0 = [-1,1.9] x0=[?1,1.9]ДІПЊЪМНтЫуИУЮЪЬтЁЃ
x0 = [-1,1.9];
x = fminsearch(fun,x0)
НсЙћ:
x = 1ЁС2
3.0000 9.0000
ЮхЁЂМьВщЧѓНтЙ§ГЬ(options ЩшжУ)
гХЛЏбЁЯю,жИЖЈЮЊ optimoptions ЕФЪфГіЛђ optimset ЕШЗЕЛиЕФНсЙЙЬхЁЃ
гяЗЈ:
options = optimoptions(@fminunc,'Algorithm','quasi-newton');
ЦфжаЁЏAlgorithmЁЏЩшжУгХЛЏЙЄОпАќгУЪВУДгХЛЏЫуЗЈЧѓНтЮЪЬт,ЦфжаfminuncКЏЪ§ПЩвдгУФтХЃЖйЗЈКЭаХРЕгђЫуЗЈЁЃ
ЩшжУfminuncВЩгУФтХЃЖйЗЈЧѓНт:ЦфжаИУКЏЪ§ЁЏAlgorithmЁЏЕФФЌШЯжЕЮЊЁЏquasi-newtonЁЏ
options = optimoptions(@fminunc,'Algorithm','quasi-newton');
quasi-newton ЫуЗЈЪЙгУОпгаШ§ДЮЯпЫбЫїЙ§ГЬЕФ BFGS ФтХЃЖйЗЈЁЃетжжФтХЃЖйЗЈЪЙгУ BFGSЙЋЪНРДИќаТ Hessian ОиеѓЕФБЦНќЁЃФњПЩвдЭЈЙ§НЋ HessUpdate бЁЯюЩшжУЮЊ ЁЎdfpЁЏ(ВЂНЋ Algorithm бЁЯюЩшжУЮЊ ЁЎquasi-newtonЁЏ)РДбЁдёБЦНќФц Hessian ОиеѓЕФ DFPЙЋЪНЁЃФњПЩвдЭЈЙ§НЋ HessUpdate ЩшжУЮЊ ЁЎsteepdescЁЏ(ВЂНЋ Algorithm ЩшжУЮЊ ЁЎquasi-newtonЁЏ)РДбЁдёзюЖИЯТНЕЗЈ,ОЁЙмДЫЩшжУЭЈГЃаЇТЪВЛИпЁЃ
ЩшжУfminuncВЩгУаХРЕгђЫуЗЈЧѓНт:БиаыздМКЬсЙЉФПБъКЏЪ§ЕФЬнЖШ,ВЛНЈвщЪЙгУЁЃ
options = optimoptions(@fminunc,'Algorithm','trust-region');
trust-region ЫуЗЈвЊЧѓФњдк fun жаЬсЙЉЬнЖШ,ВЂЪЙгУ optimoptions НЋ SpecifyObjectiveGradient ЩшжУЮЊ trueЁЃДЫЫуЗЈЪЧвЛжжзгПеМфаХРЕгђЗНЗЈ,Лљгк [2] КЭ [3] жаЫљЪіЕФФкВПЗДЩфХЃЖйЗЈЁЃУПДЮЕќДњЖМЩцМАЪЙгУдЄЬѕМўЙВщюЬнЖШЗЈ (PCG) РДНќЫЦЧѓНтДѓаЭЯпадЗНГЬзщЁЃ
гУЗЈ:
fun = @(x)x(1)*exp(-(x(1)^2 + x(2)^2)) + (x(1)^2 + x(2)^2)/20;
x0 = [1,2];
[x,fval,exitflag,output,grad,hessian] = fminunc(fun,x0,options)
ЦфЫќoptionsЕФВЮЪ§БэШчЯТ:

дДДВЛвз,ТЗЙ§ЕФИїЮЛДѓРаЧыЕуИідо