??�������Ǵ������ط��ܽ�һЩ���Լ����õ�����,ȫ�Ŀ��ڵײ��ο������в��ġ�
??��ɾ,����ѧϰ���ϸ���~
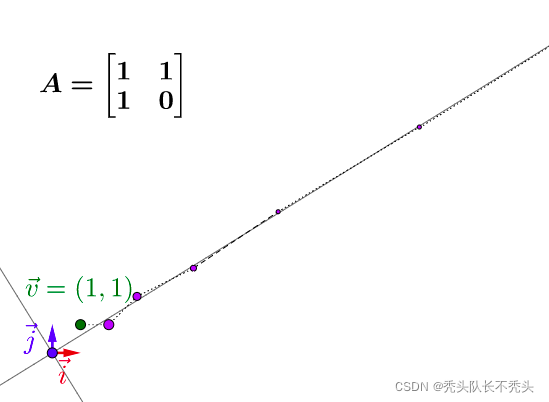
??����֪��,����˷���Ӧ��һ���任,�ǰ�����һ�����������һ������ȶ���ͬ����������������任�Ĺ�����,ԭ������Ҫ������ת�������ı仯����������ijһ��������ijЩ����ֻ���������任,������Щ����������ת��Ч��,��ô��Щ�����ͳ�Ϊ����������������,�����ı�����������ֵ��
??ʵ����,������һ�λ��Ƚ��˾���任����ֵ�����������ļ�������(ͼ�α任)Ҳ�������������塣�����ĺ�������˶���ͼ��:����������һ��������������������˶�,�����ķ���������ֵȷ��������ֵ����1,�������ڴ�����ֵ�������������α���;����ֵ����0С��1,����������������;����ֵС��0,�������������˽�,������0���DZ�ȥ�ˡ�
??��������ֵ����������,������ע���������㡣����������һ�������Բ������ĺ���,�����������塣
??????????????????????????????????���������Դ����ļ������塷
??�������ij����ijЩ������A����֮��,��ֻ���쳤��������,��λ����ͣ������ԭ���ųɵ�ֱ����,��ô��֮ΪA����������,�쳤�������̵ı�����Ϊ��Ӧ��������������ֵ����ʽ����Ϊ:
A
v
��
=
��
v
��
,
�O
A
?
��
I
�O
=
0
(1)
A\overline v=��\overline v ,\quad|A?��I|=0 \tag{1}
Av=��v,�OA?��I�O=0(1)
??
N
N
N ��������������
N
N
N ����������,������ֵ��ģ�����������ÿ�����ϵ�ͶӰ���ȡ�
??�ڲ����������ʱ,֪����ͬѧ���н���ķdz���ϸ,�������ܽ�һ��!����ֵ����������,��Ϊһ�������ռ�,���������һ������,��������Խ�������ֵ����Ӧ����������!������ͬѧ֪���е�һ��ͼ��
[
x
x
+
1
y
x
+
1
]
=
A
[
x
x
y
x
]
\begin{bmatrix} x_{x+1} \\ y_{x+1}\\ \end{bmatrix} =A \begin{bmatrix} x_{x} \\ y_{x}\\ \end{bmatrix}
[xx+1?yx+1??]=A[xx?yx??]
??����������������ֵ���������ռ�ķ���!һ������Ҫ������!�д����ϴ�����Ƶ��YouKu������
??���AΪ������Э�������,����ֵ �� \lambda �� �Ĵ�С�ͷ�ӳ�˱任�����������������ϱ任�ķ���,����Խ��,˵����������ϵ�Ԫ�ز���ҲԽ��,���仰˵��������ϵ�Ԫ�ظ���ɢ��
??���ھ���ֽ�,����Ϊ�˵õ�����ֵ����������,���ھ���
A
A
A���ԶԽǻ��Ļ�,����ͨ�����ƾ��������������������ֵ�ֽ�:
A
=
P
��
P
?
1
A = P\wedge P^{-1}
A=P��P?1
����
��
\wedge
��Ϊ�Խ���,
P
P
P���������ǵ�λ������������������ֵ��������ı���,��������ȷ��������ķ���
??������������,�����任����ܱ�֤�任���ķ����ڻ�������������������������п��ܲ��DZ仯���ķ���
??��������ֵ�Ƕ���������������������ת�̶ȵĶ���,ʵ����ֻ��������,������ֻ������ת,������������������ת����ʵ����Ҫ������������,�����Ķ�����Կ�����,�����������ھ���任��ֻ���С����任������,���������������ֵ��
1)
A
A
A ��
A
T
A^{T}
AT ����ͬ������ֵ,��������������һ����ͬ
֤��:
�O
��
E
?
A
T
�O
=
�O
��
E
T
?
A
T
�O
=
�O
(
��
E
?
A
)
T
�O
=
�O
��
E
?
A
�O
=
0
|\lambda E-A^{T}| = |\lambda E^{T}-A^{T}|=|(\lambda E - A)^{T}|=|\lambda E-A|=0
�O��E?AT�O=�O��ET?AT�O=�O(��E?A)T�O=�O��E?A�O=0
2)��
��
�O
a
i
j
<
1
,
j
=
1
,
2
,
.
.
.
,
n
�O
\sum|a_{ij}<1,j=1,2,...,n| \quad
���Oaij?<1,j=1,2,...,n�O ��
��
�O
a
i
j
?
�O
<
1
,
j
=
1
,
2
,
.
.
.
,
n
,
�ƨOa_{ij}?�O<1,j=1,2,...,n,
���Oaij??�O<1,j=1,2,...,n, ��
�O
��
k
�O
<
1
|\lambda_{k}| < 1
�O��k?�O<1
3)�������n������ֵΪ
��
1
,
��
2
,
.
.
.
,
��
n
?
\lambda_{1},\lambda_{2},...,\lambda_{n} ?
��1?,��2?,...,��n??,����
��
i
=
1
n
��
i
=
��
i
=
1
n
a
i
i
\sum_{i=1}^{n}\lambda_{i} =\sum_{i=1}^{n}a_{ii}
��i=1n?��i?=��i=1n?aii??,Ҳ�������е�����ֵ֮�;�Ϊ����Խ���Ԫ��֮��;��
��
1
,
��
2
,
.
.
.
,
��
n
=
�O
A
�O
\lambda_{1},\lambda_{2},...,\lambda_{n}=|A|
��1?,��2?,...,��n?=�OA�O
4)������ͬ������ֵ
��
1
,
��
2
,
.
.
.
,
��
n
\lambda_{1},\lambda_{2},...,\lambda_{n}
��1?,��2?,...,��n??��Ӧ����������
��
1
,
��
2
,
.
.
.
,
��
n
\alpha_{1},\alpha_{2},...,\alpha_{n}
��1?,��2?,...,��n??������
5)��4)���в���,���ÿ�����������ж������ֵ,��ô��Щ��������Ҳ�������ص�
6)
k
k
k ��������,��Ӧ�������ص����������ĸ���С�ڵ���
k
k
k
��������:
1)
k
��
k\lambda
k����
k
A
kA
kA ������ֵ
2)
��
2
\lambda^{2}
��2 ��
A
2
A^{2}
A2������ֵ,
��
k
\lambda^{k}
��k ��
A
k
A^{k}
Ak ������ֵ
3)
1
��
\frac{1}{\lambda}
��1? ?��
A
?
1
A^{-1}
A?1 ������ֵ;
1
��
�O
A
�O
\frac{1}{\lambda}|A|
��1?�OA�O ��
A
?
A^?
A? ������ֵ
�����:
1.����ֵ����������
2.����ֵ(eigenvalue)��������(eigenvector)����ֵ�ֽ�(eigenvalue decomposition)
3.��������������ֵ?
4.�����Դ���(13)�����������ֵ�������������弰����