���
����ֽ������䷽�,���ձ�ѧ�ߴ��չ֮��1979������Ķ�ͼ���ֵ����Ч�㷨.
����һ֡�Ҷ�ͼ��,һ�������ɰ�λ0~255��ʾ,��Ƭ���Ǻ���ʵʱ������ô������ݵ�,������Ҫͨ��һ����ֵ�����ֵ��,С�������ֵ�������ж���ɫ,���ڵ��ж���ɫ.
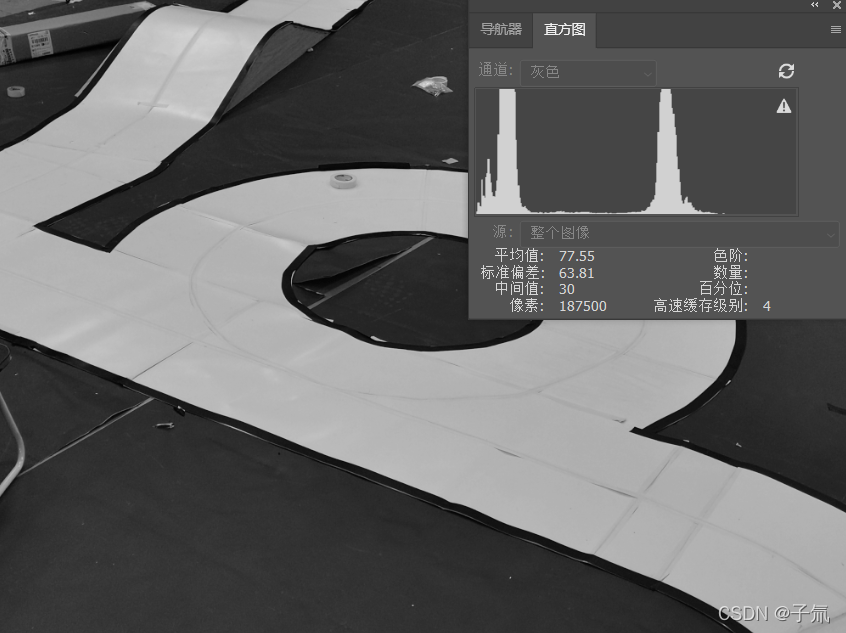
����ͷ��Ұ��,����Ҫ����ɫ����������ɫ��������ɫ,����������ȡ�ĻҶ�ͼҲ����ͨ���Ҷ�ֱ��ͼ������,��ͼ��photoshop��ȡ�ĻҶ�ֱ��ͼ,���Էdz����Եؿ���������,������Ҫ�ҵ�һ��ֵ(һ��������֮��),ʹ���ֵ����������.
ԭ��
��ֱ��ͼ��һ��ֵ�ָ�Ϊ����,ʹ������֮�䷽�����.
��һ��ͼ��
- m m m: �Ҷ�ֵΪ 1 �� m 1\sim m 1��m��
- n i n_i ni?: �Ҷ�ֵ i i i����������
- N N N: �������� N = �� i = 0 n x i N=\sum_{i=0}^n x_i N=��i=0n?xi?
- p i p_i pi?: �����Ҷȸ��� p i = n i N p_i=\frac{n_i}{N} pi?=Nni??
��һ���Ҷ���ֵ k k k�����ط�Ϊǰ�� C 0 = �O 1 �� k �O C_0=|1 \sim k| C0?=�O1��k�O�ͱ��� C 1 = �O k + 1 �� m �O C_1=|k+1\sim m| C1?=�Ok+1��m�O����,�õ�
- �� 0 \omega_0 ��0?: ǰ�� C 0 C_0 C0?�����س��ֵĸ��� �� 0 = �� ( k ) = �� i = 1 k p i \omega_0=\omega(k)=\sum_{i=1}^kp_i ��0?=��(k)=��i=1k?pi?
- �� 0 \mu_0 ��0?: ǰ�� C 0 C_0 C0?��Ҷ�ƽ��ֵ �� 0 = �� ( k ) = �� ( k ) �� ( k ) = �� i = 1 k i ? p i �� 0 \mu_0=\mu(k)=\frac{\mu(k)}{\omega(k)}=\sum_{i=1}^k\frac{i\cdot p_i}{\omega_0} ��0?=��(k)=��(k)��(k)?=��i=1k?��0?i?pi??
- �� 1 \omega_1 ��1?: ���� C 1 C_1 C1?�����س��ֵĸ��� �� 1 = 1 ? �� 0 = �� i = k + 1 m p i \omega_1=1-\omega_0=\sum_{i=k+1}^m p_i ��1?=1?��0?=��i=k+1m?pi?
- �� 1 \mu_1 ��1?: ���� C 1 C_1 C1?��Ҷ�ƽ��ֵ �� 1 = �� ? �� ( k ) 1 ? �� ( k ) = �� i = k + 1 m i ? p i �� 1 \mu_1=\frac{\mu-\mu(k)}{1-\omega(k)}=\sum_{i=k+1}^m\frac{i\cdot p_i}{\omega_1} ��1?=1?��(k)��?��(k)?=��i=k+1m?��1?i?pi??
- �� \mu ��: ����ͼ��Ҷ�ƽ��ֵ �� = �� 0 �� 0 + �� 1 �� 1 \mu=\omega_0\mu_0+\omega_1\mu_1 ��=��0?��0?+��1?��1?
- �� 2 \delta^2 ��2: ����䷽�� �� 2 = �� 0 ( �� 0 ? �� ) 2 + �� 1 ( �� 1 ? �� ) 2 = �� 0 �� 1 ( �� 1 ? �� 0 ) 2 \delta^2=\omega_0(\mu_0-\mu)^2+\omega_1(\mu_1-\mu)^2=\omega_0\omega_1(\mu_1-\mu_0)^2 ��2=��0?(��0??��)2+��1?(��1??��)2=��0?��1?(��1??��0?)2
������Ҫ���������һ�� k k kֵ,ʹ������䷽�� �� 2 \delta^2 ��2���,�����ͼ����ж�ֵ�ָ����ֵ,���Եõ��������Ч��.
ʵ��
����Ҷ�ֱ��ͼ����grayhist,�Ҷ���16��,32��,64�����ּ���,���Ҷ�ͼһ��������8λ����(0~255)��ʾ,64���Ҷȼ���256��Ϊ64��,����Ƕ��forѭ����������ͼ��,��ȡ��ֵ�ٳ���4�õ��Ҷ�ֵ(����2λ),ͬʱ���ܻҶ�ֵ����������,���ﲽ��Ϊ�β�step������10�ɽ�ʡ������.
for~for~
temp_this_pixel = img[n] >> 2;
if (temp_this_pixel < 64)
grayhist[temp_this_pixel]++;
gray_sum_all += temp_this_pixel;
px_sum_all++;
�������õ�������ȡ������䷽��fCal_var����kֵ
for
w0 = px_sum / px_sum_all;
w1 = 1 - w0;
u0 = gray_sum / px_sum;
u1 = (gray_sum_all - gray_sum) / (px_sum_all - px_sum);
fCal_var = w0 * w1 * (u0 - u1) * (u0 - u1);
// �ҵ�ʹ��������kֵ
if (fCal_var > fTemp_maxvar)
fTemp_maxvar = fCal_var;
temp_best_th = k;
������õ�
k
k
kֵ��64�Ҷȼ����µ�k,��Ҫ����256�Ҷ��µ���ֵreturn k*4.
�����õ�����ֵ������if��else�����ж�ֵ����
if(temp >= threshold)
bitmap = 1;
else
bitmap = 0;
����
int img_otsu(uint8_t *img, uint8_t img_v, uint8_t img_h)
{
uint8_t grayhist[64] = {0}; //�Ҷ�ֱ��ͼ
uint16_t px_sum_all = 0; //���ص�����
uint32_t gray_sum_all = 0; //�ܻҶȻ���
uint16_t px_sum = 0; //���ص�����
uint32_t gray_sum = 0; //�ҶȻ���
float fCal_var;
//����:1. �Ҷ�ֱ��ͼ 2. ���ص����� 3. �ܻҶȻ���
for (int i = 0; i < img_v; i += 10)
{
for (int j = 0; j < img_h; j += 10)
{
temp_this_pixel = img[i * img_h + j] /4;
grayhist[temp_this_pixel]++;
gray_sum_all += temp_this_pixel;
px_sum_all++;
}
}
//������������䷽�����ֵ
float fTemp_maxvar = 0;
uint8_t temp_best_th = 0;
uint8_t temp_this_pixel = 0;
float u0, u1, w0, w1;
for (uint8_t k = 0; k < 64; k++)
{
px_sum += grayhist[k]; //�ûҶȼ����µ����ص�����
gray_sum += k * grayhist[k]; //�ûҶȼ����µ����ص�ĻҶȺ�
w0 = 1.0 * px_sum / px_sum_all;
w1 = 1.0 - w0;
u0 = 1.0 * gray_sum / px_sum;
u1 = 1.0 * (gray_sum_all - gray_sum) / (px_sum_all - px_sum);
fCal_var = w0 * w1 * (u0 - u1) * (u0 - u1);
if (fCal_var > fTemp_maxvar)
{
fTemp_maxvar = fCal_var;
temp_best_th = k;
}
}
return temp_best_th * 4;
}


