VIO�в����IMUԤ����
һ��VIO�в���Ĺ���
1. ϵͳ�����״̬����
Ϊ�˽�Լ���������û���������ʽ�� Bundle Adjustment, ��
i
i
i ʱ��, ���������ڴ��Ż���ϵͳ״̬����������:
X
=
[
x
n
,
x
n
+
1
,
��
,
x
n
+
N
,
��
m
,
��
m
+
1
,
��
,
��
m
+
M
]
x
i
=
[
p
w
b
i
,
q
w
b
i
,
v
i
w
,
b
a
b
i
,
b
g
b
i
]
?
,
i
��
[
n
,
n
+
N
]
\begin{aligned} &\mathcal{X}=\left[\mathbf{x}_{n}, \mathbf{x}_{n+1}, \ldots, \mathbf{x}_{n+N}, \lambda_{m}, \lambda_{m+1}, \ldots, \lambda_{m+M}\right] \\ &\mathbf{x}_{i}=\left[\mathbf{p}_{w b_{i}}, \mathbf{q}_{w b_{i}}, \mathbf{v}_{i}^{w}, \mathbf{b}_{a}^{b_{i}}, \mathbf{b}_{g}^{b_{i}}\right]^{\top}, i \in[n, n+N] \end{aligned}
?X=[xn?,xn+1?,��,xn+N?,��m?,��m+1?,��,��m+M?]xi?=[pwbi??,qwbi??,viw?,babi??,bgbi??]?,i��[n,n+N]?
����:
- x i \mathbf{x}_{i} xi? ���� i i i ʱ�� IMU ������ڹ�������ϵ�е�λ��,�ٶ�,��̬, �Լ� IMU ��������ϵ�еļ��ٶȺͽ��ٶȵ�ƫ�������ơ�
- n , m n, m n,m �ֱ��ǻ���״̬��, ·���ڻ������������ʼʱ�̡�
- N N N ���������йؼ�֡������
- M M M �DZ��������������йؼ�֡�۲��·��������
2. �Ӿ���ͶӰ���
2.1 �Ӿ���ͶӰ���
����: һ������������һ���������ϵ���Ĺ���ֵ��۲�ֵ�IJ
r
c
=
[
x
z
?
u
y
z
?
v
]
\mathbf{r}_{c}=\left[\begin{array}{l} \frac{x}{z}-u \\ \frac{y}{z}-v \end{array}\right]
rc?=[zx??uzy??v?]
����,�����Ƶ�״̬��Ϊ���������ά�ռ�����
(
x
,
y
,
z
)
?
(x, y, z)^{\top}
(x,y,z)?, �۲�ֵ
(
u
,
v
)
?
(u, v)^{\top}
(u,v)? Ϊ�����������һ��ƽ������ꡣ
2.2 ����Ȳ�����
�������ڹ�һ���������ϵ�����������ϵ�µ������ϵΪ:
[
x
y
z
]
=
1
��
[
u
v
1
]
\left[\begin{array}{l} x \\ y \\ z \end{array}\right]=\frac{1}{\lambda}\left[\begin{array}{l} u \\ v \\ 1 \end{array}\right]
???xyz????=��1????uv1????
����
��
=
1
/
z
\lambda=1 / z
��=1/z ��Ϊ����ȡ�
- Ϊʲôʹ������ȱ�ʾ���������ֵ��?
- ʹ������ȵ�Ե������������ֵ��
�����ϸ�˹�ֲ�������; - ���ֵһ��ܴ�,��Ӱ���Ż��Ľ���,ʹ��
�������ܱ�֤��ֵ���ȶ�����
2.3 VIO �л�������ȵ���ͶӰ���
������������ڵ�
i
i
i ֡�г�ʼ����
��,�ڵ�
j
j
j ֡�ֱ��۲,Ԥ���� �ڵ�
j
j
j �е�����Ϊ:
[
x
c
j
y
c
j
z
c
j
1
]
=
T
b
c
?
1
T
w
b
j
?
1
T
w
b
i
T
b
c
[
1
��
u
c
i
1
��
v
c
i
1
��
1
]
\left[\begin{array}{c}x_{c_{j}} \\ y_{c_{j}} \\ z_{c_{j}} \\ 1\end{array}\right]=\mathbf{T}_{b c}^{-1} \mathbf{T}_{w b_{j}}^{-1} \mathbf{T}_{w b_{i}} \mathbf{T}_{b c}\left[\begin{array}{c}\frac{1}{\lambda} u_{c_{i}} \\ \frac{1}{\lambda} v_{c_{i}} \\ \frac{1}{\lambda} \\ 1\end{array}\right]
?????xcj??ycj??zcj??1??????=Tbc?1?Twbj??1?Twbi??Tbc??????��1?uci??��1?vci??��1?1??????
����:
T
=
[
R
t
0
T
1
]
\begin{aligned} T=\left[\begin{array}{ll} R & t \\ 0^{T} & 1 \end{array}\right] \end{aligned}
T=[R0T?t1?]?
- ��i֡�й۲�����ݱ任���������ϵ,��
�������ϵ�任��body����ϵ; - ����i��body����ϵ�任����������ϵ;
- ����������ϵ�任����j��body����ϵ;
- ��
body����ϵ�任���������ϵ,�õ���j֡��Ԥ��ֵ��
���ڼ�����ڴ��Ӿ������������ϵ�任��body����ϵ,Ȼ������body����ϵ�任���������ϵ�Ĺ��̡�
�Ӿ���ͶӰ���Ϊ:
r
c
=
[
x
c
j
z
c
j
?
u
c
j
y
c
j
z
c
j
?
v
c
j
]
\begin{aligned} &\mathbf{r}_{c}=\left[\begin{array}{l} \frac{x_{c_{j}}}{z_{c_{j}}}-u_{c_{j}} \\ \frac{y_{c_{j}}}{z_{c_{j}}}-v_{c_{j}} \end{array}\right] \\ \end{aligned}
?rc?=???zcj??xcj????ucj??zcj??ycj????vcj???????
3. Ԥ����ģ������������
3.1 Ϊʲô��ҪԤ����?
IMU�IJ���ֵΪ
��
,
b
\omega, b
��,b ,����
��
~
b
=
��
b
+
b
g
+
n
g
a
~
b
=
q
b
w
(
a
w
+
g
w
)
+
b
a
+
n
a
\begin{gathered} \tilde{\omega}^{b}=\omega^{b}+b^{g}+n^{g} \\ \tilde{a}^{b}=q_{b w}\left(a^{w}+g^{w}\right)+b^{a}+n^{a} \end{gathered}
��~b=��b+bg+nga~b=qbw?(aw+gw)+ba+na?
PVQ��ʱ��ĵ�����д��
p
�B
w
b
t
=
v
t
w
v
�B
t
w
=
a
t
w
q
�B
w
b
t
=
q
w
b
t
?
[
0
1
2
��
b
t
]
\begin{gathered} \dot{p}_{w b_{t}}=v_{t}^{w} \\ \dot{v}_{t}^{w}=a_{t}^{w} \\ \dot{q}_{w b_{t}}=q_{w b_{t}} \otimes\left[\begin{array}{c} 0 \\ \frac{1}{2} \omega^{b_{t}} \end{array}\right] \end{gathered}
p�B?wbt??=vtw?v�Btw?=atw?q�B?wbt??=qwbt???[021?��bt??]?
��������ĵ�����ϵ,���Դӵ�
i
\mathrm{i}
i ʱ�̵�
P
V
Q
\mathrm{PVQ}
PVQ ,ͨ����
I
M
U
\mathrm{IMU}
IMU �IJ���ֵ���л���,�õ���ʱ�̵� PVQ:
p
w
b
j
=
p
w
b
i
+
v
i
w
��
t
+
?
t
��
[
i
,
j
]
(
q
w
b
t
a
b
t
?
g
w
)
��
t
2
v
j
w
=
v
i
w
+
��
t
��
[
i
,
j
]
(
q
w
b
t
a
b
t
?
g
w
)
��
t
q
w
b
j
=
��
t
��
[
i
,
j
]
q
w
b
t
?
[
0
1
2
��
b
t
]
��
t
\begin{aligned} &\mathbf{p}_{w b_{j}}=\mathbf{p}_{w b_{i}}+\mathbf{v}_{i}^{w} \Delta t+\iint_{t \in[i, j]}\left(\mathbf{q}_{w b_{t}} \mathbf{a}^{b_{t}}-\mathbf{g}^{w}\right) \delta t^{2} \\ &\mathbf{v}_{j}^{w}=\mathbf{v}_{i}^{w}+\int_{t \in[i, j]}\left(\mathbf{q}_{w b_{t}} \mathbf{a}^{b_{t}}-\mathbf{g}^{w}\right) \delta t \\ &\mathbf{q}_{w b_{j}}=\int_{t \in[i, j]} \mathbf{q}_{w b_{t}} \otimes\left[\begin{array}{c} 0 \\ \frac{1}{2} \boldsymbol{\omega}^{b_{t}} \end{array}\right] \delta t \end{aligned}
?pwbj??=pwbi??+viw?��t+?t��[i,j]?(qwbt??abt??gw)��t2vjw?=viw?+��t��[i,j]?(qwbt??abt??gw)��tqwbj??=��t��[i,j]?qwbt???[021?��bt??]��t?
- ����: Ϊʲô��ҪԤ����?
ÿ��q �� b t q_{\omega b_{t}} q��bt??���º�,����Ҫ���½��л���,��������;����֪���ڽ�����д��Ż���״̬������ p p p, q q q, v v v���Ż���һ�δε�������Щ�������ڲ�ͣ�仯�ġ��ɹ�ʽ���Կ����� b i b_i bi?ʱ�̵�״̬�����ı��ʱ��,������Ҫһ�δεĻ�������ȡ b j b_j bj?ʱ�̵�״̬,����ǺܺķѼ�����Դ��,Ϊ�˽�ʡ������Դ��ʱ��,����ϣ���ܹ�������ֲ��ֵ��ظ����㡣
3.2 ��ôԤ����?
һ���ܼĹ�ʽת��,�Ϳ��Խ�����ģ��תΪԤ����ģ��:
q
w
b
t
=
q
w
b
i
?
q
b
i
b
t
\mathbf{q}_{w b_{t}}=\mathbf{q}_{w b_{i}} \otimes \mathbf{q}_{b_{i} b_{t}}
qwbt??=qwbi???qbi?bt??
��ô,PVQ ���ֹ�ʽ�еĻ�������������ڵ�i ʱ�̵���̬,�������������������ϵ����̬(ע��,���ֵı仯):
p
w
b
j
=
p
w
b
i
+
v
i
w
��
t
?
1
2
g
w
��
t
2
+
q
w
b
i
?
t
��
[
i
,
j
]
(
q
b
i
b
t
a
b
t
)
��
t
2
v
j
w
=
v
i
w
?
g
w
��
t
+
q
w
b
?
��
t
��
[
i
,
j
]
(
q
b
z
b
t
a
b
t
)
��
t
q
w
b
j
=
q
w
b
i
��
t
��
[
i
,
j
]
q
b
i
b
t
?
[
0
1
2
��
b
t
]
��
t
\begin{aligned} &\mathbf{p}_{w b_{j}}=\mathbf{p}_{w b_{i}}+\mathbf{v}_{i}^{w} \Delta t-\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}+\mathbf{q}_{w b_{i}} \iint_{t \in[i, j]}\left(\mathbf{q}_{b_{i} b_{t}} \mathbf{a}^{b_{t}}\right) \delta t^{2} \\ &\mathbf{v}_{j}^{w}=\mathbf{v}_{i}^{w}-\mathbf{g}^{w} \Delta t+\mathbf{q}_{w b_{\imath}} \int_{t \in[i, j]}\left(\mathbf{q}_{b_{z} b_{t}} \mathbf{a}^{b_{t}}\right) \delta t \\ &\mathbf{q}_{w b_{j}}=\mathbf{q}_{w b_{i}} \int_{t \in[i, j]} \mathbf{q}_{b_{i} b_{t}} \otimes\left[\begin{array}{c} 0 \\ \frac{1}{2} \omega^{b_{t}} \end{array}\right] \delta t \end{aligned}
?pwbj??=pwbi??+viw?��t?21?gw��t2+qwbi???t��[i,j]?(qbi?bt??abt?)��t2vjw?=viw??gw��t+qwb???��t��[i,j]?(qbz?bt??abt?)��tqwbj??=qwbi??��t��[i,j]?qbi?bt???[021?��bt??]��t?
�����Ԥ������������IMU ����ֵ�й�,����һ��ʱ���ڵ�IMU ����ֱ�ӻ��������͵õ���Ԥ������:
��
b
i
b
j
=
?
t
��
[
i
,
j
]
(
q
b
i
b
t
a
b
t
)
��
t
2
��
b
i
b
j
=
��
t
��
[
i
,
j
]
(
q
b
i
b
t
a
b
t
)
��
t
q
b
i
b
j
=
��
t
��
[
i
,
j
]
q
b
i
b
t
?
[
0
1
2
��
b
t
]
��
t
\begin{aligned} \boldsymbol{\alpha}_{b_{i} b_{j}} &=\iint_{t \in[i, j]}\left(\mathbf{q}_{b_{i} b_{t}} \mathbf{a}^{b_{t}}\right) \delta t^{2} \\ \boldsymbol{\beta}_{b_{i} b_{j}} &=\int_{t \in[i, j]}\left(\mathbf{q}_{b_{i} b_{t}} \mathbf{a}^{b_{t}}\right) \delta t \\ \mathbf{q}_{b_{i} b_{j}} &=\int_{t \in[i, j]} \mathbf{q}_{b_{i} b_{t}} \otimes\left[\begin{array}{c} 0 \\ \frac{1}{2} \boldsymbol{\omega}^{b_{t}} \end{array}\right] \delta t \end{aligned}
��bi?bj??��bi?bj??qbi?bj???=?t��[i,j]?(qbi?bt??abt?)��t2=��t��[i,j]?(qbi?bt??abt?)��t=��t��[i,j]?qbi?bt???[021?��bt??]��t?
����������PVQ �Ļ��ֹ�ʽ,��:
[
p
w
b
j
v
j
w
q
w
b
j
b
j
a
b
j
g
]
=
[
p
w
b
i
+
v
i
w
��
t
?
1
2
g
w
��
t
2
+
q
w
b
i
��
b
i
b
j
v
i
w
?
g
w
��
t
+
q
w
b
i
��
b
i
b
j
q
w
b
q
q
b
i
b
j
b
i
a
b
i
g
]
\left[\begin{array}{c} \mathbf{p}_{w b_{j}} \\ \mathbf{v}_{j}^{w} \\ \mathbf{q}_{w b_{j}} \\ \mathbf{b}_{j}^{a} \\ \mathbf{b}_{j}^{g} \end{array}\right]=\left[\begin{array}{c} \mathbf{p}_{w b_{i}}+\mathbf{v}_{i}^{w} \Delta t-\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}+\mathbf{q}_{w b_{i}} \alpha_{b_{i} b_{j}} \\ \mathbf{v}_{i}^{w}-\mathbf{g}^{w} \Delta t+\mathbf{q}_{w b_{i}} \boldsymbol{\beta}_{b_{i} b_{j}} \\ \mathbf{q}_{w b_{\mathbf{q}}} \mathbf{q}_{b_{i} b_{j}} \\ \mathbf{b}_{i}^{a} \\ \mathbf{b}_{i}^{g} \end{array}\right]
???????pwbj??vjw?qwbj??bja?bjg?????????=???????pwbi??+viw?��t?21?gw��t2+qwbi??��bi?bj??viw??gw��t+qwbi??��bi?bj??qwbq??qbi?bj??bia?big?????????
3.3 Ԥ������ʲô?
Ԥ������ʵ�����ٶȺͽ��ٶ������
b
j
b_j
bj?ʱ�̵�״̬������
b
i
b_i
bi?ʱ�̵�������
��ν��Ԥ����,����Ԥ�Ȼ��ֺ�,֮����Ҫ��ʱ�������á�����֪��IMU�����������Լ��ٶȺͽ��ٶȡ�״̬�����ٶ��ǹ��ڼ��ٶȵĻ���,λ���ǹ��ڼ��ٶȵĶ��λ���,��̬�ǹ��ڽ��ٶȵĻ��֡����,�ڵ�ǰ����ϵ��(��ΪIMU�IJ���ֵ�����ڵ�ǰ����ϵ�µ�)��IMU����ֵ���ֺ�,����Ҫ����,ֻ��Ҫ���������������ϵת���ͼӼ��ˡ�
���Կ���Ԥ��������Ż���״̬��(������ƫ)��,����һ���̶���ֵ��
4. Ԥ����������ļ���
Ԥ��������:һ��ʱ����IMU ������Ԥ��������Ϊ����ֵ,����ʱ��֮���״̬������Լ��
[
r
p
r
q
r
v
r
b
a
r
b
g
]
15
��
1
=
[
q
b
i
w
(
p
w
b
j
?
p
w
b
i
?
v
i
w
��
t
+
1
2
g
w
��
t
2
)
?
��
b
i
b
j
2
[
q
b
j
b
i
?
(
q
b
i
w
?
q
w
b
j
)
]
x
y
z
q
b
i
w
(
v
j
w
?
v
i
w
+
g
w
��
t
)
?
��
b
i
b
j
b
j
a
?
b
i
a
b
j
g
?
b
i
g
]
\left[\begin{array}{c} \mathbf{r}_{p} \\ \mathbf{r}_{q} \\ \mathbf{r}_{v} \\ \mathbf{r}_{b a} \\ \mathbf{r}_{b g} \end{array}\right]_{15 \times 1}=\left[\begin{array}{c} \mathbf{q}_{b_{i} w}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)-\alpha_{b_{i} b_{j}} \\ 2\left[\mathbf{q}_{b_{j} b_{i}} \otimes\left(\mathbf{q}_{b_{i} w} \otimes \mathbf{q}_{w b_{j}}\right)\right]_{x y z} \\ \mathbf{q}_{b_{i} w}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)-\beta_{b_{i} b_{j}} \\ \mathbf{b}_{j}^{a}-\mathbf{b}_{i}^{a} \\ \mathbf{b}_{j}^{g}-\mathbf{b}_{i}^{g} \end{array}\right]
???????rp?rq?rv?rba?rbg?????????15��1?=???????qbi?w?(pwbj???pwbi???viw?��t+21?gw��t2)?��bi?bj??2[qbj?bi???(qbi?w??qwbj??)]xyz?qbi?w?(vjw??viw?+gw��t)?��bi?bj??bja??bia?bjg??big?????????
���������λ��,�ٶ�,ƫ�ö���ֱ������õ����ڶ����ǹ�����Ԫ������ת���,���� [.] xyz ��ʾֻȡ��Ԫ�����鲿
(
x
,
y
,
z
)
(x, y, z)
(x,y,z) ��ɵ���ά������
5. Ԥ������ɢ����
����Ԥ���ֵļ���,ǰ���ᵽ����ŷ��������ֵ��������ʹ��mid-point ����,����������ʱ��k ��
k
+
1
k+1
k+1 ��λ����������ʱ�̵IJ���ֵ
a
,
w
a, w
a,w ��ƽ��ֵ������:
��
=
1
2
(
(
��
b
k
?
b
k
g
)
+
(
��
b
k
+
1
?
b
k
g
)
)
q
b
i
b
k
+
1
=
q
b
i
b
k
?
[
1
1
2
��
��
t
]
a
=
1
2
(
q
b
i
b
k
(
a
b
k
?
b
k
a
)
+
q
b
i
b
k
+
1
(
a
b
k
+
1
?
b
k
a
)
)
��
b
i
b
k
+
1
=
��
b
i
b
k
+
��
b
i
b
k
��
t
+
1
2
a
��
t
2
��
b
i
b
k
+
1
=
��
b
i
b
k
+
a
��
t
b
k
+
1
a
=
b
k
a
+
n
b
k
a
��
t
b
k
+
1
g
=
b
k
g
+
n
b
k
g
��
t
\begin{aligned} \boldsymbol{\omega} &=\frac{1}{2}\left(\left(\boldsymbol{\omega}^{b_{k}}-\mathbf{b}_{k}^{g}\right)+\left(\boldsymbol{\omega}^{b_{k+1}}-\mathbf{b}_{k}^{g}\right)\right) \\ \mathbf{q}_{b_{i} b_{k+1}} &=\mathbf{q}_{b_{i} b_{k}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \boldsymbol{\omega} \delta t \end{array}\right] \\ \mathbf{a} &=\frac{1}{2}\left(\mathbf{q}_{b_{i} b_{k}}\left(\mathbf{a}^{b_{k}}-\mathbf{b}_{k}^{a}\right)+\mathbf{q}_{b_{i} b_{k+1}}\left(\mathbf{a}^{b_{k+1}}-\mathbf{b}_{k}^{a}\right)\right) \\ \alpha_{b_{i} b_{k+1}} &=\alpha_{b_{i} b_{k}}+\beta_{b_{i} b_{k}} \delta t+\frac{1}{2} \mathbf{a} \delta t^{2} \\ \beta_{b_{i} b_{k+1}} &=\beta_{b_{i} b_{k}}+\mathbf{a} \delta t \\ \mathbf{b}_{k+1}^{a} &=\mathbf{b}_{k}^{a}+\mathbf{n}_{\mathbf{b}_{k}^{a} \delta t} \\ \mathbf{b}_{k+1}^{g} &=\mathbf{b}_{k}^{g}+\mathbf{n}_{\mathbf{b}_{k}^{g} \delta t} \end{aligned}
��qbi?bk+1??a��bi?bk+1??��bi?bk+1??bk+1a?bk+1g??=21?((��bk??bkg?)+(��bk+1??bkg?))=qbi?bk???[121?����t?]=21?(qbi?bk??(abk??bka?)+qbi?bk+1??(abk+1??bka?))=��bi?bk??+��bi?bk??��t+21?a��t2=��bi?bk??+a��t=bka?+nbka?��t?=bkg?+nbkg?��t??
6. Ԥ�������ķ���
����?:
һ�� IMU ������Ϊ����ֵ���������������ܹ��궨������,һ��ʱ���ڶ�� IMU ���ݻ����γɵ�Ԥ�������ķ�����?
Covariance Propagation(�����)
����˵��:
��֪һ������
y
=
A
x
,
x
��
N
(
0
,
��
x
)
y=A x, x \in N\left(0, \Sigma_{x}\right)
y=Ax,x��N(0,��x?), ����
��
y
=
A
��
x
A
?
\Sigma_{y}=A \Sigma_{x} A^{\top}
��y?=A��x?A?
��
y
=
E
(
(
A
x
)
(
A
x
)
?
)
=
E
(
A
x
x
?
A
?
)
=
A
��
x
A
?
\begin{aligned} \Sigma_{y}=& E\left((A x)(A x)^{\top}\right) \\ =& E\left(A x x^{\top} A^{\top}\right) \\ &=A \Sigma x A^{\top} \end{aligned}
��y?==?E((Ax)(Ax)?)E(Axx?A?)=A��xA??
����,Ҫ�Ƶ�Ԥ��������Э����,������Ҫ֪�� imu ������Ԥ������֮������Ե��ƹ�ϵ��
������֪������ʱ���������Դ��ݷ���:
��
i
k
=
F
k
?
1
��
i
k
?
1
+
G
k
?
1
n
k
?
1
\eta_{i k}=F_{k-1} \eta_{i k-1}+G_{k-1} n_{k-1}
��ik?=Fk?1?��ik?1?+Gk?1?nk?1?
����: ״̬�����Ϊ
��
i
k
=
[
��
��
i
k
,
��
v
i
k
,
��
p
i
k
]
\eta_{i k}=\left[\delta \theta_{i k}, \delta v_{i k}, \delta p_{i k}\right]
��ik?=[����ik?,��vik?,��pik?], ��������Ϊ
n
k
=
[
n
k
g
,
n
k
a
]
n_{k}=\left[n_{k}^{g}, n_{k}^{a}\right]
nk?=[nkg?,nka?] ��
���Ĵ�������������ɵ�ǰʱ�̵���� ���ݸ���һʱ��,��ǰʱ�������������ݸ���һʱ�̡�
һ����Ȥ������:
���ս�Ŀ�г��д�����Ϣ�Ľ�Ŀ,ǰһ���˸�����һ���˵���Ϣ + �Լ�������(����)���ݸ���һ����,���������ϢԽ��Խ���� Э����������ͨ�����Ƽ���õ�:
��
i
k
=
F
k
?
1
��
i
k
?
1
F
k
?
1
?
+
G
k
?
1
��
n
G
k
?
1
T
\Sigma_{i k}=F_{k-1} \Sigma_{i k-1} F_{k-1}^{\top}+G_{k-1} \Sigma_{n} G_{k-1}^{T}
��ik?=Fk?1?��ik?1?Fk?1??+Gk?1?��n?Gk?1T?
����,
��
n
\Sigma_{n}
��n? �Dz���������Э�������, ����� i ʱ�̿�ʼ���е���,
��
i
i
=
0
\Sigma_{i i}=0
��ii?=0 ��
7. ״̬������Ե��ƹ�ʽ���Ƶ�
ͨ������״̬��֮��ĵ��ƹ�ϵ�Ƿ����Եķ����� x k = f ( x k ? 1 , u k ? 1 ) x_{k}=f\left(x_{k-1}, u_{k-1}\right) xk?=f(xk?1?,uk?1?), ����״̬��Ϊ x , u x, u x,u Ϊϵͳ����������
- ���ǿ��������ַ������Ƶ�״̬���ݵ����Ե��ƹ�ϵ:
- һ���ǻ���
һ��̩��չ���������Ʒ��̡� - һ���ǻ���
�����ʱ��仯�ĵ��Ʒ��̡�
7. 1����̩��չ��������(Ӧ���� EKF ��Э����Ԥ��)
��״̬��Ϊ
x
=
x
^
+
��
x
x=\hat{x}+\delta x
x=x^+��x, ����, ��ֵΪ
x
^
\hat{x}
x^, ���Ϊ
��
x
\delta x
��x ������, ������
u
u
u ������Ϊ
n
n
n ��
������ϵͳ
x
k
=
f
(
x
k
?
1
,
u
k
?
1
)
x_{k}=f\left(x_{k-1}, u_{k-1}\right)
xk?=f(xk?1?,uk?1?) ��״̬�������Ե��ƹ�ϵ����:
��
x
k
=
F
��
x
k
?
1
+
G
n
k
?
1
\delta x_{k}=F \delta x_{k-1}+G n_{k-1}
��xk?=F��xk?1?+Gnk?1?
����,
F
\mathrm{F}
F ��״̬��
x
k
x_{k}
xk? ��״̬��
x
k
?
1
x_{k-1}
xk?1? ���ſ˱Ⱦ���,
G
\mathrm{G}
G ��״̬��
x
k
x_{k}
xk? ��������
u
k
?
1
u_{k-1}
uk?1? ���ſ˱Ⱦ���
֤��:��������״̬��������һ��̩��չ����:
x
k
=
f
(
x
k
?
1
,
u
k
?
1
)
x
^
k
+
��
x
k
=
f
(
x
^
k
?
1
+
��
x
k
?
1
,
u
^
k
?
1
+
n
k
?
1
)
x
^
k
+
��
x
k
=
f
(
x
^
k
?
1
,
u
^
k
?
1
)
+
F
��
x
k
?
1
+
G
n
k
?
1
\begin{gathered} x_{k}=f\left(x_{k-1}, u_{k-1}\right) \\ \hat{x}_{k}+\delta x_{k}=f\left(\hat{x}_{k-1}+\delta x_{k-1}, \hat{u}_{k-1}+n_{k-1}\right) \\ \hat{x}_{k}+\delta x_{k}=f\left(\hat{x}_{k-1}, \hat{u}_{k-1}\right)+F \delta x_{k-1}+G n_{k-1} \end{gathered}
xk?=f(xk?1?,uk?1?)x^k?+��xk?=f(x^k?1?+��xk?1?,u^k?1?+nk?1?)x^k?+��xk?=f(x^k?1?,u^k?1?)+F��xk?1?+Gnk?1??
7.2 ���������ʱ��仯�ĵ��Ʒ���
��������ܹ��Ƶ�״̬�����ʱ��仯�ĵ�����ϵ, ����:
��
x
��
=
A
��
x
+
B
n
\delta x^{\prime}=A \delta x+B n
��x��=A��x+Bn
�����״̬�Ĵ��ݷ���Ϊ:
��
x
k
=
��
x
k
?
1
+
��
x
k
?
1
��
��
t
��
��
x
k
=
(
I
+
A
��
t
)
��
x
k
?
1
+
B
��
t
n
k
?
1
\begin{gathered} \delta x_{k}=\delta x_{k-1}+\delta x_{k-1}^{\prime} \Delta t \\ \rightarrow \delta x_{k}=(I+A \Delta t) \delta x_{k-1}+B \Delta t n_{k-1} \end{gathered}
��xk?=��xk?1?+��xk?1��?��t����xk?=(I+A��t)��xk?1?+B��tnk?1??
�������Ƶ���ʽ�Ŀ��Կ�����:
F
=
I
+
A
��
t
,
G
=
B
��
t
F=I+A \Delta t, G=B \Delta t
F=I+A��t,G=B��t
- ��һ�ַ������Ǻܺ�ô,Ϊʲô������ȥŪ�����ʱ��ı仯��?
������Ϊ VIO ϵͳ���Ѿ�֪����״̬�ĵ�����״̬֮���ת�ƾ�������:�����Ѿ�֪���ٶȺ�״̬��֮��Ĺ�ϵ:
v
�B
=
R
a
b
+
g
\dot{v}=R a^{b}+g
v�B=Rab+g
�����ǾͿ����Ƶ��ٶȵ�����״̬���֮��Ĺ�ϵ,��ÿһ���϶����ϸ��Ե���� ����:
v
�B
+
��
v
�B
=
R
(
I
+
[
��
��
]
��
)
(
a
b
+
��
a
b
)
+
(
g
+
��
g
)
��
v
�B
=
R
��
a
b
+
R
[
��
��
]
��
(
a
b
+
��
a
b
)
+
��
g
��
v
�B
=
R
��
a
b
?
R
[
a
b
]
��
��
��
+
��
g
\begin{gathered} \dot{v}+\delta \dot{v}=R\left(I+[\delta \theta]_{\times}\right)\left(a^{b}+\delta a^{b}\right)+(g+\delta g) \\ \delta \dot{v}=R \delta a^{b}+R[\delta \theta]_{\times}\left(a^{b}+\delta a^{b}\right)+\delta g \\ \delta \dot{v}=R \delta a^{b}-R\left[a^{b}\right]_{\times} \delta \theta+\delta g \end{gathered}
v�B+��v�B=R(I+[����]��?)(ab+��ab)+(g+��g)��v�B=R��ab+R[����]��?(ab+��ab)+��g��v�B=R��ab?R[ab]��?����+��g?
�ɴ˾�����������,����д������
A
A
A ��
B
B
B ���������ˡ�
8. Ԥ���ֵ������ƹ�ʽ�Ƶ�
���Ȼع�Ԥ���ֵ������ƹ�ʽ, ����������Ҳ���ǽ�ģ��:
��
=
1
2
(
(
��
b
k
+
n
k
g
?
b
k
g
)
+
(
��
b
k
+
1
+
n
k
+
1
g
?
b
k
g
)
)
q
b
i
b
k
+
1
=
q
b
i
b
k
?
[
1
1
2
��
��
t
]
a
=
1
2
(
q
b
i
b
k
(
a
b
k
+
n
k
a
?
b
k
a
)
+
q
b
i
b
k
+
1
(
a
b
k
+
1
+
n
k
+
1
a
?
b
k
a
)
)
��
b
i
b
k
+
1
=
��
b
i
b
k
+
��
b
i
b
k
��
t
+
1
2
a
��
t
2
��
b
i
b
k
+
1
=
��
b
i
b
k
+
a
��
t
b
k
+
1
a
=
b
k
a
+
n
b
k
a
��
t
b
k
+
1
g
=
b
k
g
+
n
b
k
g
��
t
\begin{aligned} \boldsymbol{\omega} &=\frac{1}{2}\left(\left(\boldsymbol{\omega}^{b_{k}}+\mathbf{n}_{k}^{g}-\mathbf{b}_{k}^{g}\right)+\left(\boldsymbol{\omega}^{b_{k+1}}+\mathbf{n}_{k+1}^{g}-\mathbf{b}_{k}^{g}\right)\right) \\ \mathbf{q}_{b_{i} b_{k+1}} &=\mathbf{q}_{b_{i} b_{k}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \boldsymbol{\omega} \delta t \end{array}\right] \\ \mathbf{a} &=\frac{1}{2}\left(\mathbf{q}_{b_{i} b_{k}}\left(\mathbf{a}^{b_{k}}+\mathbf{n}_{k}^{a}-\mathbf{b}_{k}^{a}\right)+\mathbf{q}_{b_{i} b_{k+1}}\left(\mathbf{a}^{b_{k+1}}+\mathbf{n}_{k+1}^{a}-\mathbf{b}_{k}^{a}\right)\right) \\ \boldsymbol{\alpha}_{b_{i} b_{k+1}} &=\boldsymbol{\alpha}_{b_{i} b_{k}}+\boldsymbol{\beta}_{b_{i} b_{k}} \delta t+\frac{1}{2} \mathbf{a} \delta t^{2} \\ \boldsymbol{\beta}_{b_{i} b_{k+1}} &=\boldsymbol{\beta}_{b_{i} b_{k}}+\mathbf{a} \delta t \\ \mathbf{b}_{k+1}^{a} &=\mathbf{b}_{k}^{a}+\mathbf{n}_{\mathbf{b}_{k}^{a}} \delta t \\ \mathbf{b}_{k+1}^{g} &=\mathbf{b}_{k}^{g}+\mathbf{n}_{\mathbf{b}_{k}^{g}} \delta t \end{aligned}
��qbi?bk+1??a��bi?bk+1??��bi?bk+1??bk+1a?bk+1g??=21?((��bk?+nkg??bkg?)+(��bk+1?+nk+1g??bkg?))=qbi?bk???[121?����t?]=21?(qbi?bk??(abk?+nka??bka?)+qbi?bk+1??(abk+1?+nk+1a??bka?))=��bi?bk??+��bi?bk??��t+21?a��t2=��bi?bk??+a��t=bka?+nbka??��t=bkg?+nbkg??��t?
ȷ�����ݵ�״̬��,������,Ȼ��ʼ�������ݷ��̡�
��ǰ��һ��̩��չ�����Ƶ���ʽ
��
x
k
=
F
��
x
k
?
1
+
G
n
k
?
1
\delta x_{k}=F \delta x_{k-1}+G n_{k-1}
��xk?=F��xk?1?+Gnk?1?, ����?�����Ƶ������µ���ʽ:
[
��
��
b
k
+
1
b
k
+
1
��
��
��
b
k
+
1
b
k
+
1
��
��
��
b
k
+
1
b
k
+
1
��
��
b
k
+
1
a
��
b
k
+
1
g
]
=
F
[
��
��
b
k
b
k
��
��
��
b
k
b
k
��
��
��
b
k
b
k
��
��
b
k
a
��
b
k
g
]
+
G
[
n
k
a
n
k
g
n
k
+
1
a
n
k
+
1
g
n
b
k
a
n
b
k
g
]
\left[\begin{array}{c} \delta \boldsymbol{\alpha}_{b_{k+1} b_{k+1}^{\prime}} \\ \delta \boldsymbol{\theta}_{b_{k+1} b_{k+1}^{\prime}} \\ \delta \boldsymbol{\beta}_{b_{k+1} b_{k+1}^{\prime}} \\ \delta \mathbf{b}_{k+1}^{a} \\ \delta \mathbf{b}_{k+1}^{g} \end{array}\right]=\mathbf{F}\left[\begin{array}{c} \delta \boldsymbol{\alpha}_{b_{k} b_{k}^{\prime}} \\ \delta \boldsymbol{\theta}_{b_{k} b_{k}^{\prime}} \\ \delta \boldsymbol{\beta}_{b_{k} b_{k}^{\prime}} \\ \delta \mathbf{b}_{k}^{a} \\ \delta \mathbf{b}_{k}^{g} \end{array}\right]+\mathbf{G}\left[\begin{array}{c} \mathbf{n}_{k}^{a} \\ \mathbf{n}_{k}^{g} \\ \mathbf{n}_{k+1}^{a} \\ \mathbf{n}_{k+1}^{g} \\ \mathbf{n}_{\mathbf{b}_{k}^{a}} \\ \mathbf{n}_{\mathbf{b}_{k}^{g}} \end{array}\right]
???????����bk+1?bk+1��??����bk+1?bk+1��??����bk+1?bk+1��??��bk+1a?��bk+1g?????????=F???????����bk?bk��??����bk?bk��??����bk?bk��??��bka?��bkg?????????+G?????????nka?nkg?nk+1a?nk+1g?nbka??nbkg????????????
F
,
G
\mathrm{F}, \mathrm{G}
F,G Ϊ����ʱ�̼��Э����ݾ���
��������ֱ�Ӹ���
F
,
G
F, G
F,G ��������ʽ,�����Բ����������ϸ�Ƶ�:
F
=
[
I
f
12
I
��
t
?
1
4
(
q
b
i
b
k
+
q
b
i
b
k
+
1
)
��
t
2
f
15
0
I
?
[
��
]
��
0
0
?
I
��
t
0
f
32
I
?
1
2
(
q
b
i
b
k
+
q
b
i
b
k
+
1
)
��
t
f
35
0
0
0
I
0
0
0
0
0
I
]
\mathbf{F}=\left[\begin{array}{ccccc} \mathbf{I} & \mathbf{f}_{12} & \mathbf{I} \delta t & -\frac{1}{4}\left(\mathbf{q}_{b_{i} b_{k}}+\mathbf{q}_{b_{i} b_{k+1}}\right) \delta t^{2} & \mathbf{f}_{15} \\ \mathbf{0} & \mathbf{I}-[\boldsymbol{\omega}]_{\times} & \mathbf{0} & \mathbf{0} & -\mathbf{I} \delta t \\ \mathbf{0} & \mathbf{f}_{32} & \mathbf{I} & -\frac{1}{2}\left(\mathbf{q}_{b_{i} b_{k}}+\mathbf{q}_{b_{i} b_{k+1}}\right) \delta t & \mathbf{f}_{35} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I} \end{array}\right]
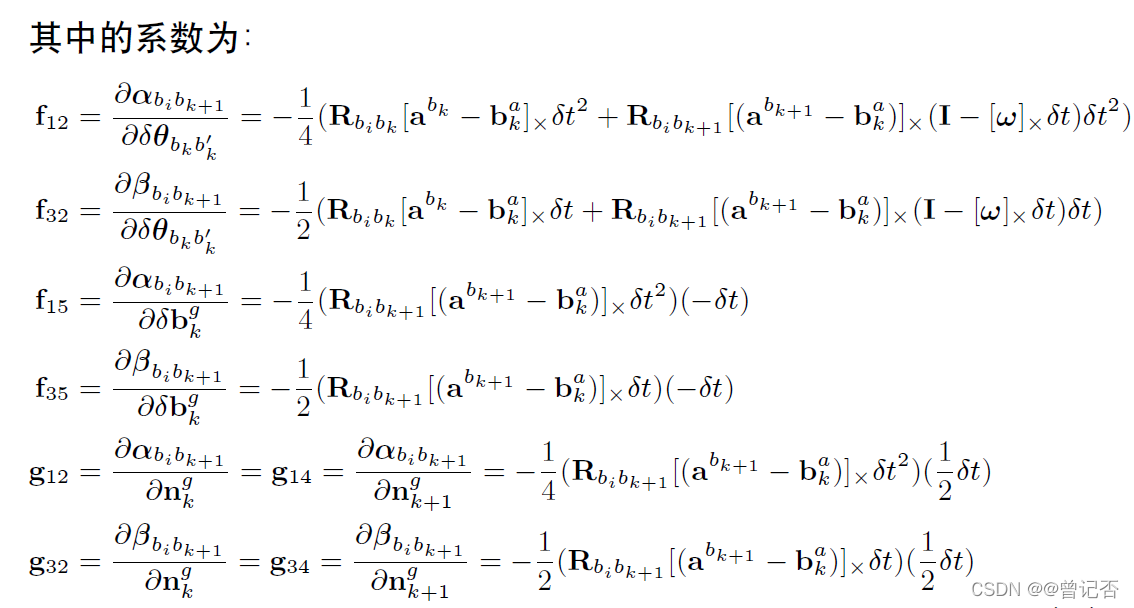
F=???????I0000?f12?I?[��]��?f32?00?I��t0I00??41?(qbi?bk??+qbi?bk+1??)��t20?21?(qbi?bk??+qbi?bk+1??)��tI0?f15??I��tf35?0I????????
G
=
[
1
4
q
b
i
b
k
��
t
2
g
12
1
4
q
b
i
b
k
+
1
��
t
2
g
14
0
0
0
1
2
I
��
t
0
1
2
I
��
t
0
0
1
2
q
b
i
b
k
��
t
g
32
1
2
q
b
i
b
k
+
1
��
t
g
34
0
0
0
0
0
0
I
��
t
0
0
0
0
0
0
I
��
t
]
\mathbf{G}=\left[\begin{array}{cccccc} \frac{1}{4} \mathbf{q}_{b_{i} b_{k}} \delta t^{2} & \mathbf{g}_{12} & \frac{1}{4} \mathbf{q}_{b_{i} b_{k+1}} \delta t^{2} & \mathbf{g}_{14} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \frac{1}{2} \mathbf{I} \delta t & \mathbf{0} & \frac{1}{2} \mathbf{I} \delta t & \mathbf{0} & \mathbf{0} \\ \frac{1}{2} \mathbf{q}_{b_{i} b_{k}} \delta t & \mathbf{g}_{32} & \frac{1}{2} \mathbf{q}_{b_{i} b_{k+1}} \delta t & \mathbf{g}_{34} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I} \delta t & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I} \delta t \end{array}\right]
G=???????41?qbi?bk??��t2021?qbi?bk??��t00?g12?21?I��tg32?00?41?qbi?bk+1??��t2021?qbi?bk+1??��t00?g14?21?I��tg34?00?000I��t0?0000I��t????????
�����в�Jacobian���Ƶ�
1. �Ӿ���ͶӰ�в��Jacobian
�Ӿ��в�Ϊ:
���ڵ�
i
\mathrm{i}
i ֡�е�������, ��ͶӰ����
j
\mathrm{j}
j ֡�������ϵ�µ�ֵΪ:
[
x
c
j
y
c
j
z
c
j
1
]
=
T
b
c
?
1
T
w
b
j
?
1
T
w
b
i
T
b
c
[
1
��
u
c
i
1
��
v
c
i
1
��
1
]
\left[\begin{array}{c} x_{c_{j}} \\ y_{c_{j}} \\ z_{c_{j}} \\ 1 \end{array}\right]=\mathbf{T}_{b c}^{-1} \mathbf{T}_{w b_{j}}^{-1} \mathbf{T}_{w b_{i}} \mathbf{T}_{b c}\left[\begin{array}{c} \frac{1}{\lambda} u_{c_{i}} \\ \frac{1}{\lambda} v_{c_{i}} \\ \frac{1}{\lambda} \\ 1 \end{array}\right]
?????xcj??ycj??zcj??1??????=Tbc?1?Twbj??1?Twbi??Tbc??????��1?uci??��1?vci??��1?1??????
�����ά������ʽΪ:
f
c
j
=
[
x
c
j
y
c
j
z
c
j
]
=
R
b
c
?
R
w
b
j
?
R
w
b
i
R
b
c
1
��
[
u
c
i
v
c
i
1
]
+
R
b
c
?
(
R
w
b
j
?
(
(
R
w
b
i
p
b
c
+
p
w
b
i
)
?
p
w
b
j
)
?
p
b
c
)
\begin{aligned} \mathbf{f}_{c_{j}}=\left[\begin{array}{c} x_{c_{j}} \\ y_{c_{j}} \\ z_{c_{j}} \end{array}\right] &=\mathbf{R}_{b c}^{\top} \mathbf{R}_{w b_{j}}^{\top} \mathbf{R}_{w b_{i}} \mathbf{R}_{b c} \frac{1}{\lambda}\left[\begin{array}{c} u_{c_{i}} \\ v_{c_{i}} \\ 1 \end{array}\right] \\ &+\mathbf{R}_{b c}^{\top}\left(\mathbf{R}_{w b_{j}}^{\top}\left(\left(\mathbf{R}_{w b_{i}} \mathbf{p}_{b c}+\mathbf{p}_{w b_{i}}\right)-\mathbf{p}_{w b_{j}}\right)-\mathbf{p}_{b c}\right) \end{aligned}
fcj??=???xcj??ycj??zcj???????=Rbc??Rwbj???Rwbi??Rbc?��1????uci??vci??1????+Rbc??(Rwbj???((Rwbi??pbc?+pwbi??)?pwbj??)?pbc?)?
���Ƶ����� Jacobian ֮ǰ, Ϊ�˼�ʽ, �ȶ������±���:
f
b
i
=
R
b
c
f
c
i
+
p
b
c
f
w
=
R
w
b
i
f
b
i
+
p
w
b
i
f
b
j
=
R
w
b
j
?
(
f
w
?
p
w
b
j
)
\begin{aligned} \mathbf{f}_{b_{i}} &=\mathbf{R}_{b c} \mathbf{f}_{c_{i}}+\mathbf{p}_{b c} \\ \mathbf{f}_{w} &=\mathbf{R}_{w b_{i}} \mathbf{f}_{b_{i}}+\mathbf{p}_{w b_{i}} \\ \mathbf{f}_{b_{j}} &=\mathbf{R}_{w b_{j}}^{\top}\left(\mathbf{f}_{w}-\mathbf{p}_{w b_{j}}\right) \end{aligned}
fbi??fw?fbj???=Rbc?fci??+pbc?=Rwbi??fbi??+pwbi??=Rwbj???(fw??pwbj??)?
Jacobian Ϊ�Ӿ���������ʱ�̵�״̬��,���,�Լ��������:
J
=
[
?
r
c
?
[
��
p
b
i
b
i
��
��
��
b
i
b
i
��
]
?
r
c
?
[
p
b
j
b
j
��
��
��
b
j
b
j
��
]
?
r
c
?
[
��
p
c
c
��
��
��
c
c
��
]
?
r
c
?
��
��
]
\mathbf{J}=\left[\begin{array}{lll}\frac{\partial \mathbf{r}_{c}}{\partial\left[\begin{array}{l}\delta \mathbf{p}_{b_{i} b_{i}^{\prime}} \\ \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\end{array}\right]} \quad \frac{\partial \mathbf{r}_{c}}{\partial\left[\begin{array}{l}\mathbf{p}_{b_{j} b_{j}^{\prime}} \\ \delta \boldsymbol{\theta}_{b_{j} b_{j}^{\prime}}\end{array}\right]} \quad \frac{\partial \mathbf{r}_{c}}{\partial\left[\begin{array}{l}\delta \mathbf{p}_{c c^{\prime}} \\ \delta \boldsymbol{\theta}_{c c^{\prime}}\end{array}\right]} \quad \frac{\partial \mathbf{r}_{c}}{\partial \delta \lambda}\end{array}\right]
J=[?[��pbi?bi��??����bi?bi��???]?rc???[pbj?bj��??����bj?bj��???]?rc???[��pcc��?����cc��??]?rc???����?rc???]

