决策算法的本质目的就是开辟凸空间,
便于后期使用二次规划QP搜索出一条符合约束条件的最优路径。
最优路径的含义:使目标函数最小化的路径。
路径规划本质就是求曲线方程:。
开辟凸空间的方法有很多:
1,重决策的策略:分层状态机,深度学习等。根据经验规则进行决策。
2,轻决策:DP。根据代价Cost进行决策。
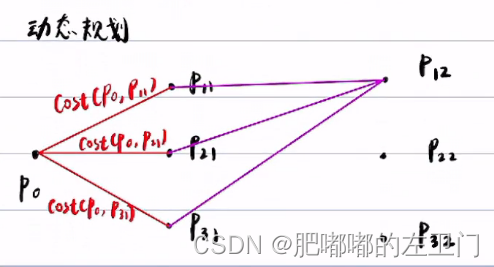
一,DP决策算法:根据代价Cost进行决策
DP的过程:

?
?
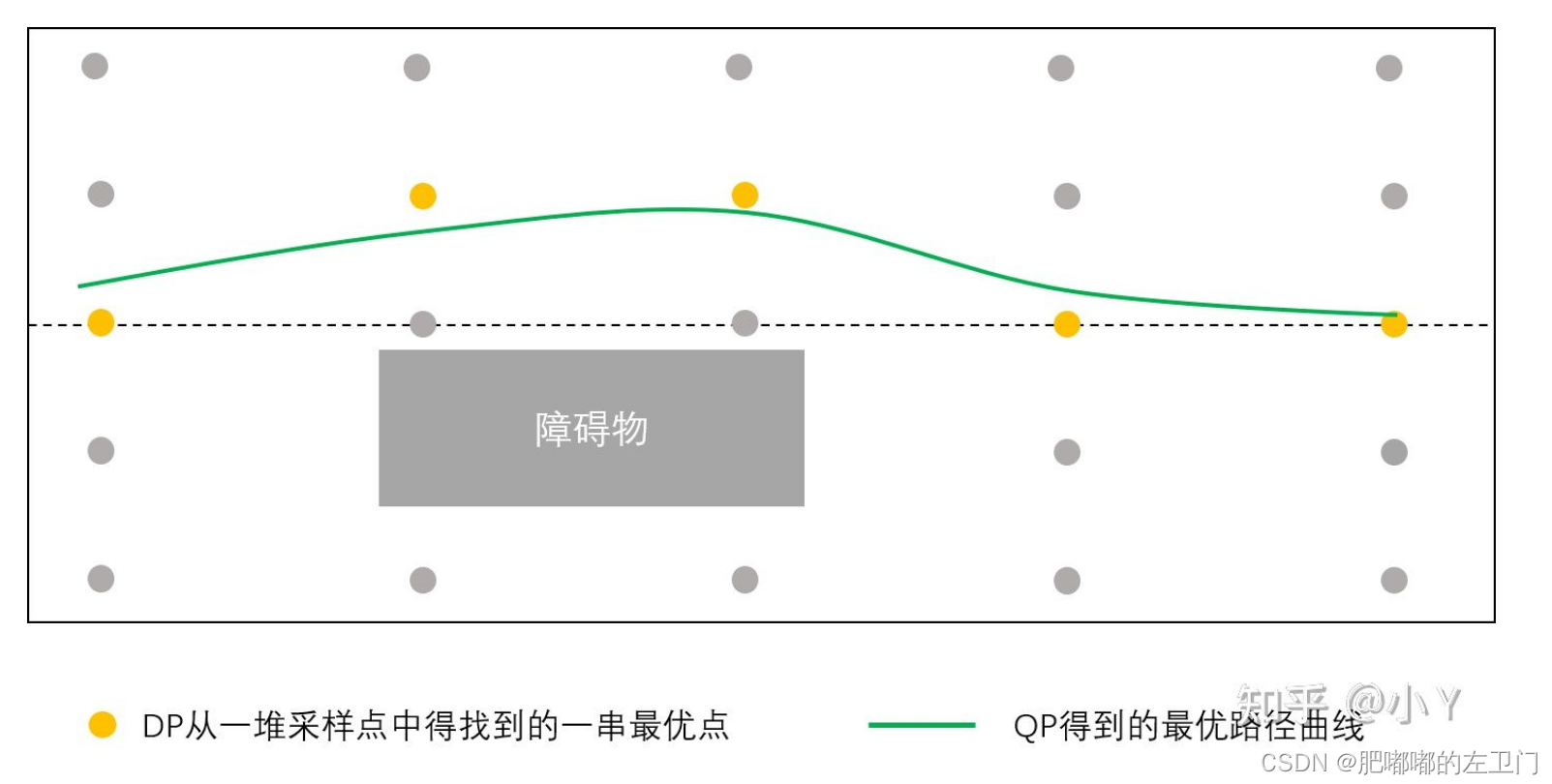
在frenet坐标系中,在均匀固定的的
方向均匀撒点,并用5次曲线(或者其他曲线)连接各点。每条曲线的方程为:
。
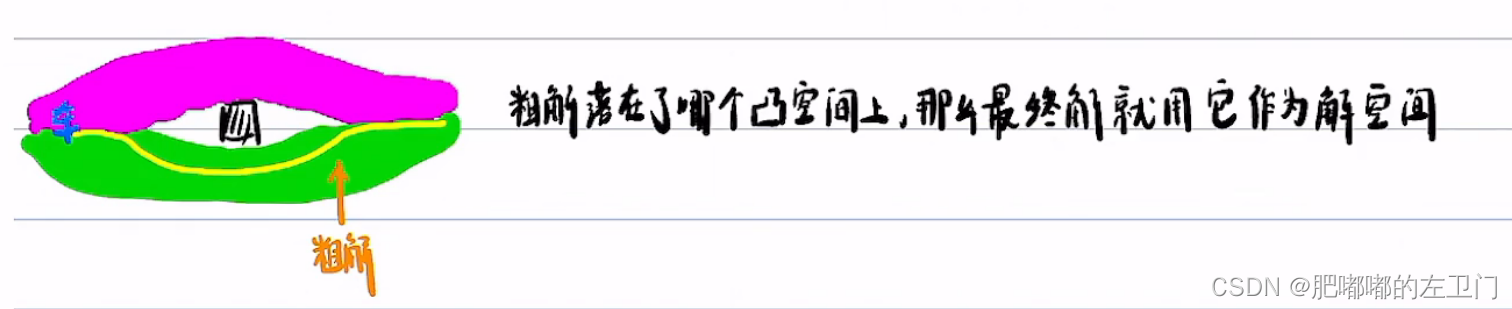
每条曲线都有对应的Cost,用DP算法找到Cost最小的路径,作为粗解。
并以此粗解为基础开辟凸空间。
DP结果:
二,分层状态机(或者深度学习):根据经验规则进行决策
根据经验规则,结合主车与障碍物距离,相对速度,周围环境等场景信息,综合获得决策结果。
建立场景与决策的映射关系。
三,2种策略算法的优缺点分析
DP:
优点:
1,无需经验规则,根据代价Cost即可处理复杂的场景。
2,通过DP可获得凸空间中路径曲线的粗解,有了粗解作为基础路径,QP进行平滑时更易于求解出最优路径。
缺点:
1,场景复杂时,计算量较大
2,代价函数设计较为复杂
3,对于感知,定位精度要求相对较高
分层状态机:
优点:
1,计算量较小
2,对于感知,定位精度要求相对较低
缺点:
1,场景太多,无法完全覆盖
2,根据经验规则开辟的凸空间可能比较复杂,故通过二次规划可能无法获得最终的解。
四,应用场景
重决策:L2,L3
轻决策:L4

