���ڶ�������жϷ���matlabʵ��(�������ڡ�������״���ж�)
��������:����û����صĹ���Ӧ�þ���,ֻ�Ǵ��������㷨����Ȥ��д�˲��͡���������д���,��ӭ��������ָ��,��ʤ�м���������Ҫ��ע���㷨��ʵ��,����ʵ��Ӧ�õ����Ȿ��û���κξ���,����Ҳ�����漰��
0 ǰ��
���Ĵ��˵һ��Ŀǰ���ü�����жϵ��ڶ�����ڵķ��������ʵ��Ӧ�û��DZȽ��ձ��,���絥���ļ��������ϵ��ж�,����ѡ��һ����Χ,���������Ƿ������Χ֮��ġ�
���������жϵ��Ƿ��ڶ������,ͨ������ʶ������ͼ��,Ȼ�����Ƿ������ʶ���ͼ�η�Χ�ڡ����Ƕ��ںܸ��ӵ�ͼ��,�Ͳ�����һ���ӵõ�����,�������ֻ���ͼ�ε��㷨ʵ����Ч�ʲ�����,�������ڼ�������㡣
���õ��жϵ��Ƿ��ڶ�����ڵ��㷨,�����εı���n���,ͨ������O(n)������,������ʵ��Ҷ�����,�Ϳ�˭�����Ż������Ƕ����������˵,�����ö��ַ��㷨,�����㸴�ӶȽ���O(logn)����,����ں�����漰����
֮������п�,����һ��д���жϵ��Ƿ�����ά�Լ���ά�������е�����(���ڿӲ��� )��
���IJο��IJ��ͺ���������:
[1] �����(���㼸��,�жϵ��Ƿ��ڶ������,���ַ�)
https://www.cnblogs.com/yym2013/p/3673616.html
[2] �жϵ��ڶ�����ڵ��㷨(Winding Number���)
https://www.codenong.com/cs106265948/
[3]Hormann K, Agathos A. The point in polygon problem for arbitrary polygons[J]. Computational geometry, 2001, 20(3): 131-144.
1 ���߽���㷨 (Crossing Number)
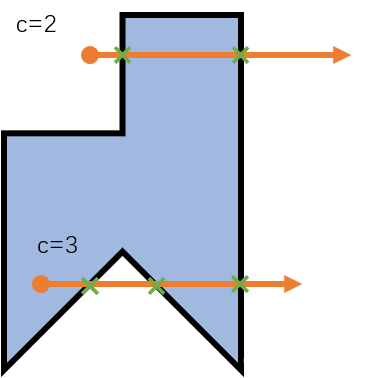
�÷�����Ϊ���߷�������ż����ԭ�����ǴӸõ�P�����������һ������,������������εĽ�������Ϊ����,���P�ڶ�����ڡ�
��������һ��������,�����ӷ���������ȥ,��һ��Ҫ����һ�η����ݡ�������������η�����,��һ��һ������û�д�����
ͨ��Ϊ�˼����,����ֱ��ѡ��Ϊ+x����,Ҳ�������ҵķ���
һ���Ż���˼·��:
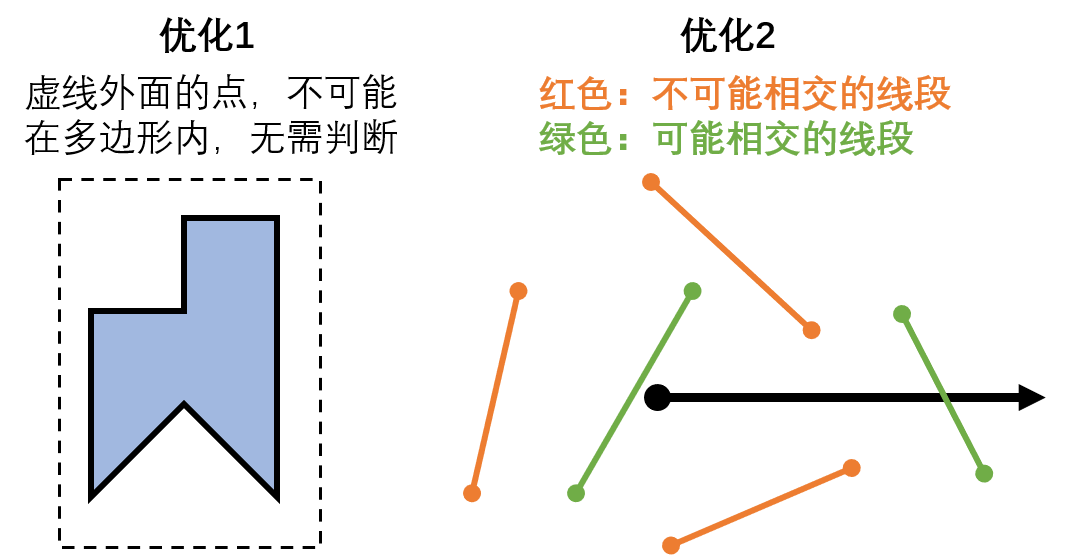
1��Ŷ���һ������εķ�Χ,����㳬�������Χ,���������ж�,ֱ���ж�Ϊ����ͼ���ڡ�
2��+x���������ཻ���߶�,��y�ķ�Χһ��Ҫ���������ˡ�Ҳ����˵����߶������ߵ����Ϸ�,�����߶������ߵ����·�,������Ҫ�ټ��㽻��,��Ϊ�������ཻ��
3��+x���������ཻ���߶�,�����������ߵ���ࡣ
����������źܼ�,���ǻ���һЩϸ����Ҫ�ۡ����統��������Ҳ��ˮƽ��,��ô���㽻��?�������ڱ�����,��ô���㽻��?������������ˮƽ��,���ҵ�Ҳ���������������,������㼸��?������������ô�������ζ���,���õ����������ཻ��bug?
�����⼸������,�Ҵ�Ž������Ϊ:����һ�����ߵ�ĸ���,ר�������жϵ��Ƿ��ڱ����ϡ������պ�����ˮƽ�ߵı�����,���ټ����Ƿ��ཻ,ֱ�ӵ������ڱ����ϴ������������ж�,��һͷС�ڵ���,һͷС�ڵķ�ʽ,�����ظ����㡣������Ϊ�����д������,���Զ��ڼ���õ��Ľ���xc,��Ҫ��һ����������ֹ�ж�ʧ��
���岻��˵,matlab��������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
[IsInPoly,IsOnBD]=IfInPoly1(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
%scatter(xy2(:,1),xy2(:,2),24,or(IsInPoly,IsOnBD),'Marker','.');%����ʾ����
%���ú���
function [IsInPoly,IsOnBD]=IfInPoly1(BD,xy2)
%���������(IsInPoly��ʾ���ڲ�,IsOnBD��ʾ�ڶ���α߽���)
%BD�Ƕ���α߽�,����˳��,���С�xy2�ǵ������,���С�
%����1,���߷�
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
BD2=[BD;BD(1,:)];
else %�����ı߽��Ѿ���β���
BD2=BD;
end
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%��+x���������
for kp=1:NP
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
%IsInPoly(kp)=false;
continue
end
%ѭ��ÿһ����
NCross=0;%��ʼ����������
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
%�����+x�������ཻ,�ڵ�һ�����ߵ����
if max([xB1,xB2])<xp
continue %���Ե������Ҳ������������
end
%�ж��Ƿ���ˮƽ�ı�����
if yB1==yp && yB2==yp && ( min([xB1,xB2])<=xp && max([xB1,xB2])>=xp)
IsOnBD(kp)=true;%�������ˮƽ�߶���,��֤�����ڱ�Ե
break %ֹͣѭ��
end
%�ж��Ƿ���ij������
if (xp==xB1 && yp==yB1) || (xp==xB2 && yp==yB2)
IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
break
end
%������ߴ��������,��yֵһ����������ߵ�����yֵ�м�
if (yB1<=yp && yp<yB2) || (yB2<=yp && yp<yB1)
%�����+x�������ཻ,��һ����xp���ұ�
yc=yp;
xc=xB1+(xB2-xB1)/(yB2-yB1)*(yc-yB1);%����������ߵĽ���(xc,yc)
if (xc-xp)>4*eps %���ڼ���ᵼ��xc��һ�������,���Ա��ع���Ϊ4*eps
NCross=NCross+1;%֤����ȷ�ཻ,����+1
end
%�ٴ��ж��Ƿ��ڱ�����
if abs(xc-xp)<=4*eps && abs(yc-yp)<=4*eps %������ΪҲ�漰��xc,����Ҳ������һ������
IsOnBD(kp)=true;%�������xc���ǵ�xp,��֤����������
break
end
end
end
%�����ཻ��������ż���ж��Ƿ��ڶ������
if ~IsOnBD(kp) && mod(NCross,2)
IsInPoly(kp)=true;%���������,��֤���ڶ������
end
end
end
ע:��������˵��ڱ߽���IsInPoly,���ڶ���α߽���IsOnBD��������������Ҫ�ϲ�,������or(IsInPoly,IsOnBD)���кϲ������
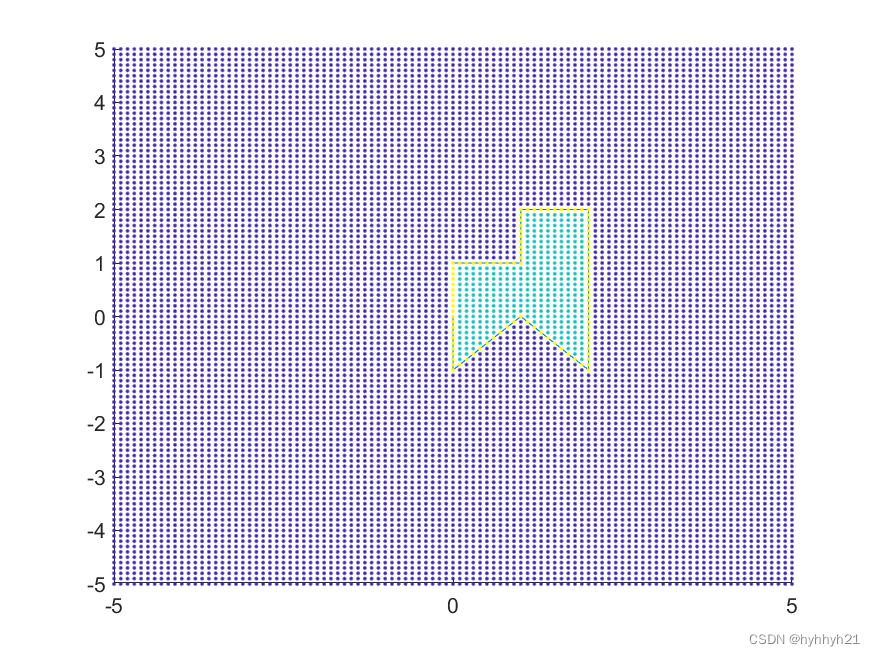
����������:
2 ��������(Winding Number)
�����������ཻ��������,��������һ�����ߡ����ǻ��������ټ�����彻��,�����ж��ཻ���߶�,�����ϴ���������������´���������ߡ�
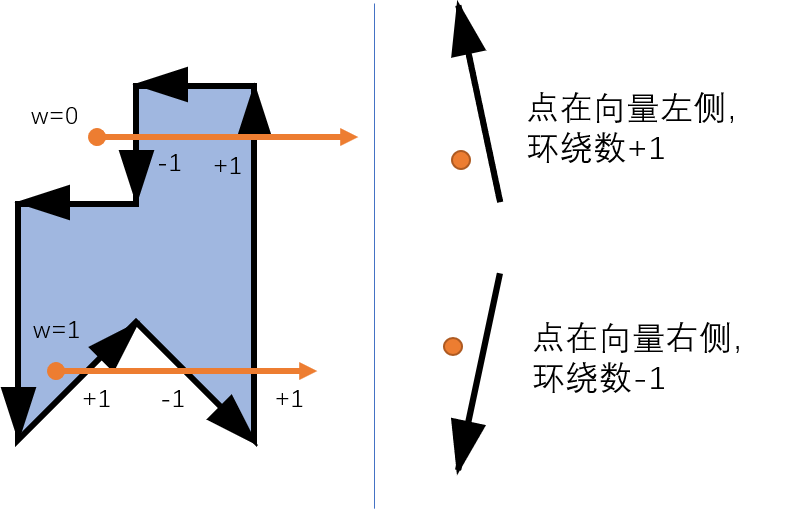
�ٸ�����,��������һ�½ڵ�ͼ���о����ӡ�����������߶ζ��������˷������Ƕ������ϴ�������(�����߶����),������+1,���´�������(�����߶��Ҳ�),������-1�����նԻ��������,����0˵�����ڶ������,������0˵�����ڶ�����ڡ�
���������matlab��������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
[IsInPoly,IsOnBD]=IfInPoly2(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
%������DZ߽����,�����������ϲ�
%IsInPoly=or(IsInPoly,IsOnBD);
function [IsInPoly,IsOnBD]=IfInPoly2(BD,xy2)
%���������(IsInPoly��ʾ���ڲ�,IsOnBD��ʾ�ڶ���α߽���)
%BD�Ƕ���α߽�,����˳��,���С�xy2�ǵ������,���С�
%����2 winding number ��������
%���߽���β���
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %�����ı߽��Ѿ���β���
NB=size(BD,1)-1;
BD2=BD;
end
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%��+x���������,���������
for kp=1:NP
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
continue
end
%ѭ��ÿһ����
NWinding=0;%��ʼ��������
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
%�����+x�������ཻ,�ڵ�һ�����ߵ����
if max([xB1,xB2])<xp
continue %���Ե������Ҳ������������
end
%�ж��Ƿ���ˮƽ�ı�����
if yB1==yp && yB2==yp && ( min([xB1,xB2])<=xp && max([xB1,xB2])>=xp)
IsOnBD(kp)=true;%�������ˮƽ�߶���,��֤�����ڱ�Ե
break
end
%�ж��Ƿ���ij������
if (xp==xB1 && yp==yB1) || (xp==xB2 && yp==yB2)
IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
break
end
%������ߴ��������,��yֵһ����������ߵ�����yֵ�м�
if (yB1<=yp && yp<yB2) || (yB2<=yp && yp<yB1)
%�����+x�������ཻ,��ʼ�ж�����������������ұ�(����������,����ǰ�������������������)
if yB2>yB1 %����ߵķ�������
CrossP=(xB2-xB1)*(yp-yB1)-(xp-xB1)*(yB2-yB1);%�����������,�������������
if CrossP>0 %�����������
NWinding=NWinding+1;
end
elseif yB2<yB1 %����ߵķ�������
CrossP=(xB2-xB1)*(yp-yB1)-(xp-xB1)*(yB2-yB1);%�����������,�������������
if CrossP<0 %���������Ҳ�
NWinding=NWinding-1;
end
else %�����ˮƽ,�������ཻ���
CrossP=-1;
end
%�ٴ��ж��Ƿ��ڱ�����
if abs(CrossP)<=4*eps %������CrossP==0���ڱ�����,��������Ϊ�漰��������,���Լ���һ��4eps��
IsOnBD(kp)=true;
%break
end
end
end
%���NWinding����0,��֤���ڶ������
if ~IsOnBD(kp) && NWinding
IsInPoly(kp)=true;
end
end
end
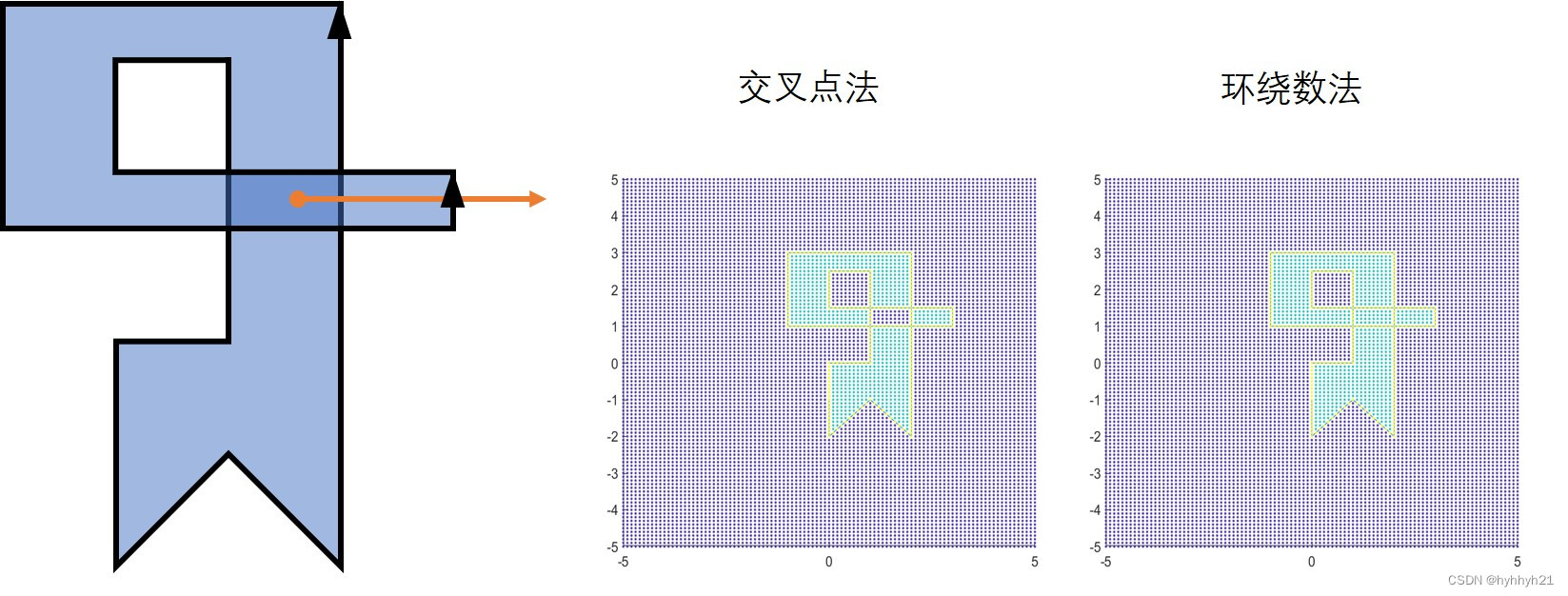
�����������������,�������ཻͼ��,�����������Զ��ص�����������֡�����涨����������2ʱ,��������߷�����ж�Ϊ�㲻��ͼ����,���ǻ����������Խ�����������ֳ�����
(����涨������Ϊż��,�����ͼ����,������Ϊ��������ͼ����,�������������߽��㷨�ȼۡ�)
������ͼ��չʾ��һ�����ཻͼ��,��ͬʱ�ý���㷨�ͻ�������ʱ,���߶����ص����ֵĴ�����ʽ��һ���ͼ�β���������ཻ����,��������������ཻ��һ�����бȽϸߵ�����Ļ�,����ѡ������Ҫ���㷨��
��Ȼ,���������������������彻��,��������ʹ�ó���������Գ���Ҳ�Ƚ����еĻ�,���Գ����û���������
3 �Ƕȷ�(ת�Ƿ�)
3.1 �Ƕ���ӷ�
��������Ƚ���������,�����������ͼ���ڲ�,���������������ĽǶȵ���360�㡣
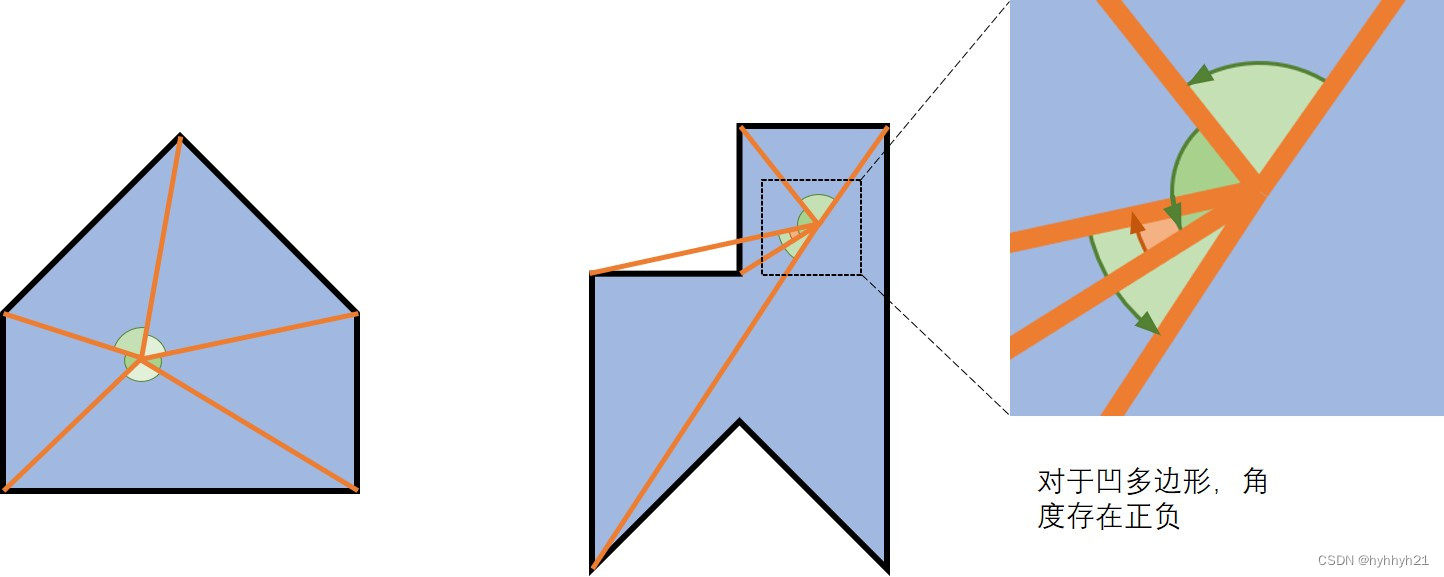
�������ͼ���ǰ������,�����������Ҫ����Ƕȵ�����������ͼ��ʾ,��ͬһ�������ϵ����ĽǶȶ���Ϊ��,�����������ͻȻ����ĽǶȶ���Ϊ���������ж�����,�������IJ�����ж���
д����ʽΪ:
��
=
��
��
i
=
��
1
n
?
1
a
c
o
s
(
v
1
?
?
v
2
?
��
v
1
?
��
��
v
2
?
��
)
?
s
i
g
n
(
v
1
?
��
v
2
?
)
\theta=\sum{\omega_i}=\sum_{1}^{n-1}{acos(\frac{\vec{v_1} \cdot \vec{v_2}}{\left \| \vec{v_1}\right \| \left \| \vec{v_2}\right \|} ) *sign(\vec{v_1}��\vec{v_2})}
��=����i?=1��n?1?acos(��v1??����v2??��v1???v2???)?sign(v1??��v2??)
�����v1��v2,�ǵ�p���߶����˵��������ߡ�
����Ļ���ԭ���Լ�����ͻ���������ͬ,������Ϊ�漰��acos�ļ���,����ͨ���ٶȱȽ���,����С�ڵĸĽ����ὲ����ô���١�
�����������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%xy2=[0.5,2];
[IsInPoly,IsOnBD]=IfInPoly3(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
function [IsInPoly,IsOnBD]=IfInPoly3(BD,xy2)
%����3 ����Ƕȷ�
%���߽���β���
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %�����ı߽��Ѿ���β���
NB=size(BD,1)-1;
BD2=BD;
end
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%��+x���������,���������
for kp=1:NP
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
continue
end
%�ж��Ƿ���ij������
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
IsOnBD(kp)=true;
continue
end
%ѭ��ÿһ����
AngleSum=0;%��ʼ��������
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
v1=[xB1-xp,yB1-yp];v2=[xB2-xp,yB2-yp];
CosAngle=dot(v1,v2)/norm(v1)/norm(v2);
if abs(CosAngle+1)<4*eps
IsOnBD(kp)=true;
break
end
Sign=sign(det([v1(1),v2(1);v1(2),v2(2)]));
AngleSum=acos(CosAngle)*Sign+AngleSum;
%AngleList(kB)=acos(CosAngle)*Sign/pi*180;
end
if abs(AngleSum)/2/pi>(1-1e-5)
IsInPoly(kp)=true;
end
end
IsInPoly=and(IsInPoly,~IsOnBD);%������Щ���ڱ������ֱ����ڵ�,�ж�Ϊ�ڱ����ϡ�
end
3.2 �Ľ��Ƕȷ�(matlab�Դ�inpolygon��������)
matlab�Դ�inpolygon()�������ж����Ƿ��ڶ�����ڡ�
���ﲻ�پ���ļ���Ƕ�,������������x��y�Ĺ�ϵ,���д����жϡ����Ƚ���������ϸ�����������,���һ�����ߡ������߷����Ϊ���ϨJ�����ϨI�����¨L�����¨K���ĸ�����,�ֱ���0��1��2��3��4�����֡�Ȼ������⼸�����ֵı仯,�ж����սǶȡ�
����ķ������Բμ�matlab����inpolygon�ľ������,���߿�����The point in polygon problem for arbitrary polygons,�����ҾͲ����׳������Լ����ˡ�
����ʹ�÷�������
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%����6 matlab�Դ�����
[IsInPoly,IsOnBD]=inpolygon(xy2(:,1),xy2(:,2),BD(:,1),BD(:,2));
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
���õ���2019b�汾��,�м������ߵ�û��ʶ�����,������û���������Ľ�������������ٶȺܿ졣
4 �����(ֻ�����������)
�������˼·��Դ�ڽǶȷ��������������˵,���ڶ�����ڵĻ�,���õ������θ��������������һϵ������,��Щ�����ļн�һ������ǡ�
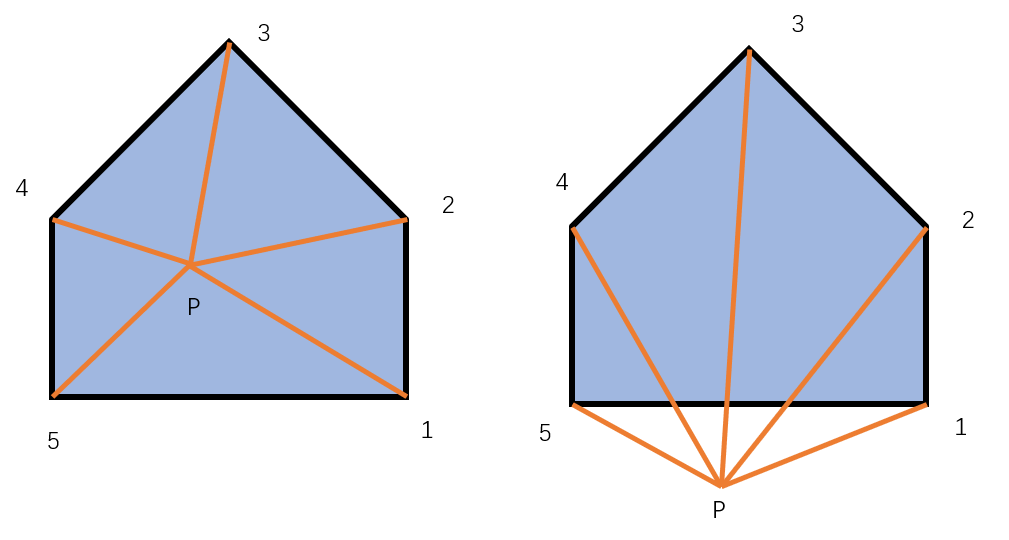
��������ͼ,P1��P2���������,P2��P3���ҲΪ��,ͬ��P3��P4,P4��P5,P5��P1��Ϊ�������Ƕ�����ͼ,P5��P1�IJ�����Ǹ�ֵ,˵�����ڶ�����⡣
��������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
%BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%xy2=[0.8,0.8];
IsInPoly=IfInPoly4(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
%scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly4(BD,xy2)
%����4 ��������
%���߽���β���
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %�����ı߽��Ѿ���β���
NB=size(BD,1)-1;
BD2=BD;
end
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%��+x���������,���������
for kp=1:NP
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
continue
end
%�ж��Ƿ���ij������
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
IsInPoly(kp)=true;
continue
end
%ѭ��ÿһ����
ArrowDir=zeros(NB,1);%��ʼ���������
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
v1=[xB1-xp,yB1-yp,0];v2=[xB2-xp,yB2-yp,0];
CrossV=cross(v1,v2);
ArrowDir(kB)=CrossV(3);
end
%�������ǶȺ���С�Ƕ�֮��
if all(ArrowDir>=0) || all(ArrowDir<=0)
IsInPoly(kp)=true;
end
end
end
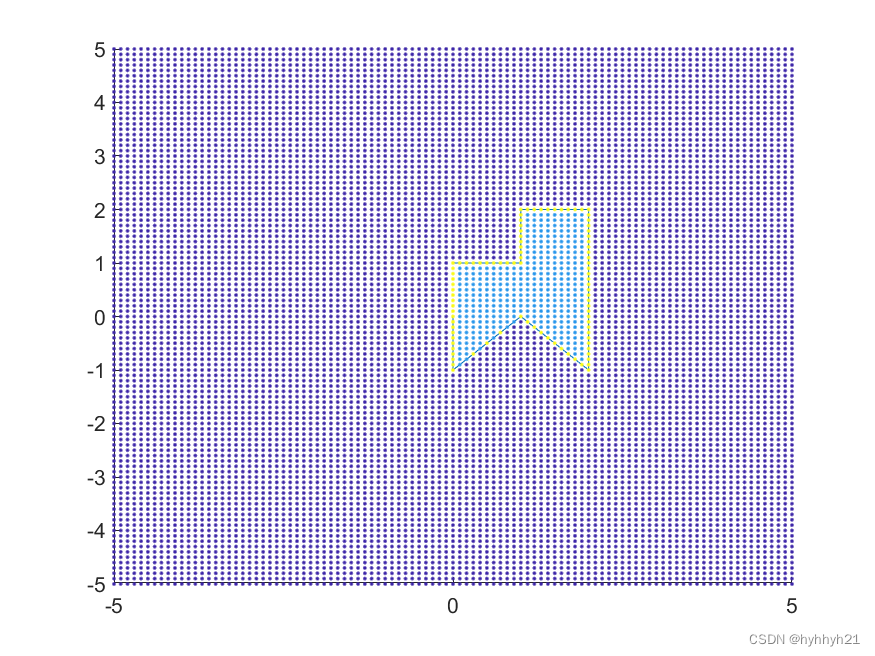
�������ͼ:
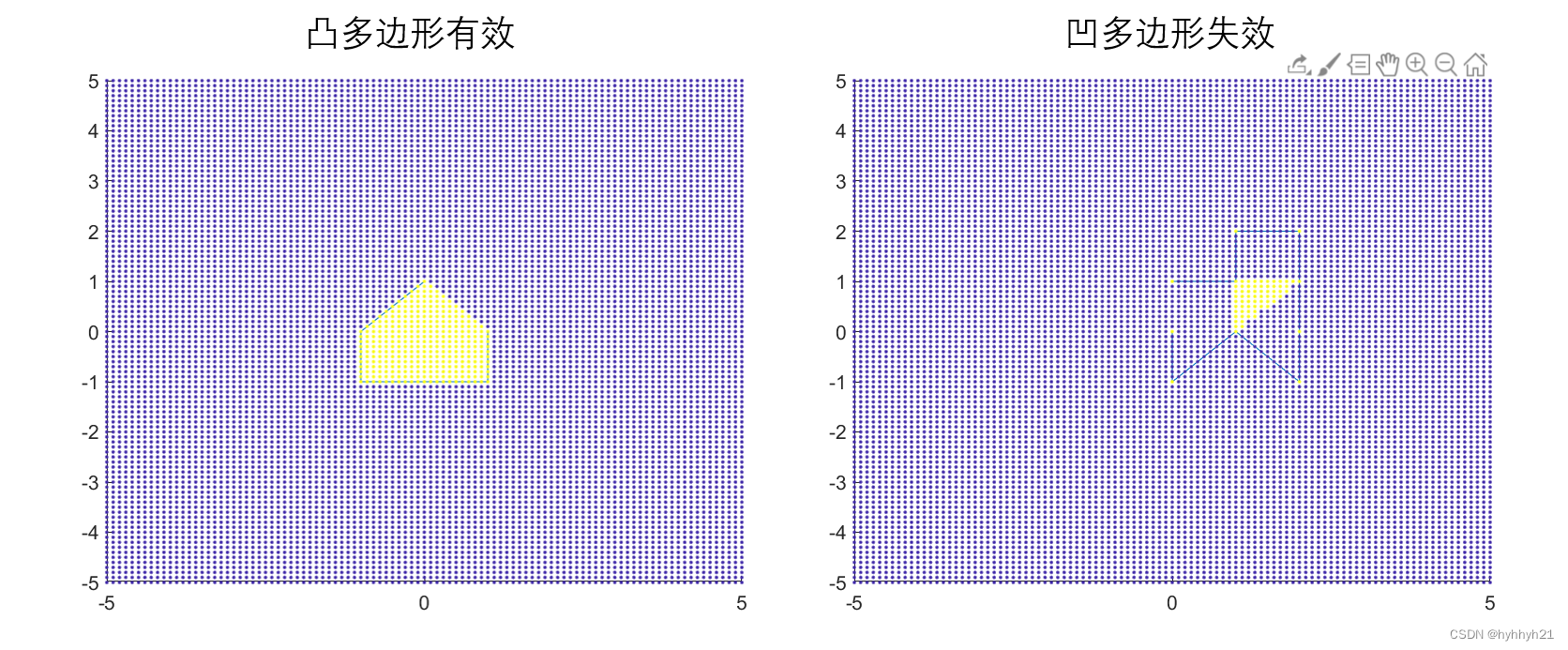
���Կ������������,����㷨����û����ġ����Ƕ��ڰ������,��������ͻ��������Ľ�����������������һ��Ҫע���Ƿ�Ϊ����Ρ�
5 ����
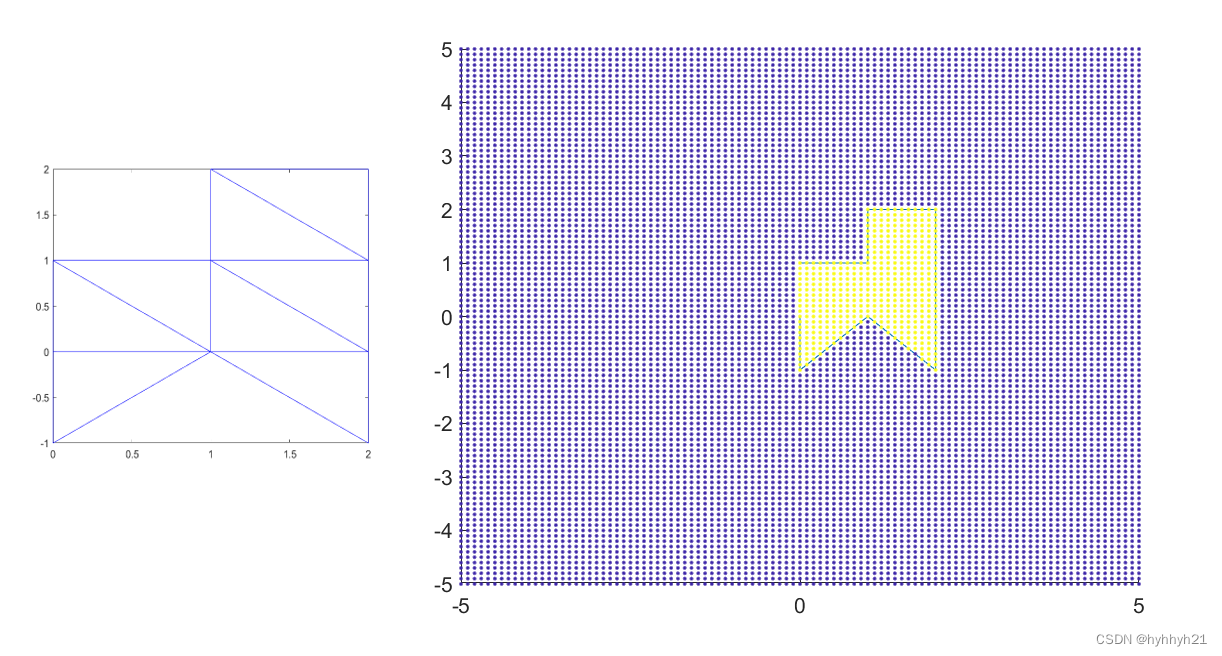
������˼��,�������ڶ������״̫���ڸ���,���Ľ����жϡ���ô�Ϳ����ȸ�������ڲ��������������,Ȼ�������жϵ��Ƿ��������ھͿ��ԡ�
����������ŵ������ж��ٶȿ�,���Ƕ���б�ߵ��жϱȽϸ��ӡ��п��ܵ��¾��ε�һ�����ڶ������,һ�����ڶ�����⡣
������������������м��жϡ����Ⱦ��ǻ���������,�������õ���matlab�Դ���delaunayTriangulation()������
�жϵ��Ƿ�����������,�����������������Ԫ���η��̵õ���
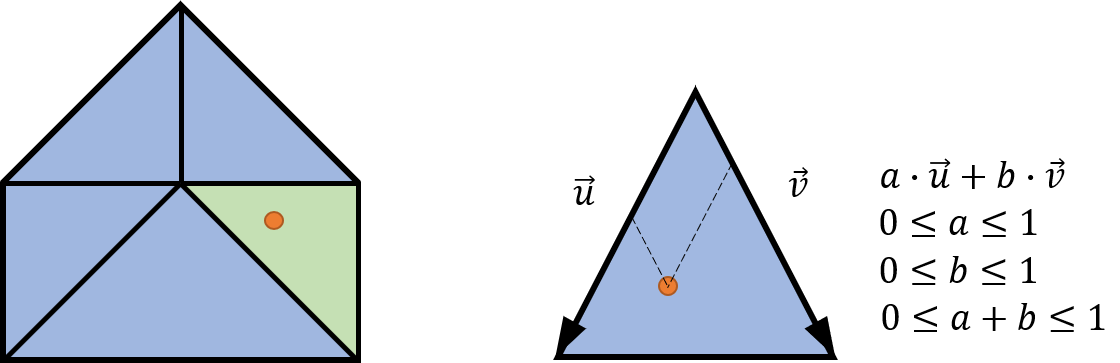
������λ�ÿ�����au+bv��ȷ��,�������a��b��a+b����0��1֮��,��õ�϶����������ڡ�
�����������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
IsInPoly=IfInPoly5(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly5(BD,xy2)
%����5 �����������ʷַ�
%����߽���β���,��ȡ��
if (BD(1,1)==BD(end,1)) && (BD(1,2)==BD(end,2))
BD2=BD(1:end-1,:);
else %�����ı߽��Ѿ���β���
BD2=BD;
end
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1);
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
%IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD2(:,1));
max_X_BD=max(BD2(:,1));
min_Y_BD=min(BD2(:,2));
max_Y_BD=max(BD2(:,2));
%���ձ�Ե�����ʷ�
C=(1:NB)';
C=[C,[(2:NB)';1]];
DT = delaunayTriangulation(BD2,C);
%�����������������
IO = isInterior(DT);
CL=DT.ConnectivityList;
CL(~IO,:)=[];
BD2=DT.Points;%���п��ܻᱻ����������,�����������¼���һ��
NB=size(BD2,1);
BDx=BD2(:,1);
BDy=BD2(:,2);
%triplot(CL,BDx,BDy)
%�õ�ÿ�������ε�����
TRI_X=BDx(CL);
TRI_Y=BDy(CL);
NT=size(CL,1);
%����ÿ�������εķ�Χ
max_TRI_X=max(TRI_X,[],2);
min_TRI_X=min(TRI_X,[],2);
max_TRI_Y=max(TRI_Y,[],2);
min_TRI_Y=min(TRI_Y,[],2);
%����ÿ�������ε�����
V1_Sum=[TRI_X(:,2)-TRI_X(:,1),TRI_Y(:,2)-TRI_Y(:,1)];
V2_Sum=[TRI_X(:,3)-TRI_X(:,1),TRI_Y(:,3)-TRI_Y(:,1)];
%��ʼѭ���ж�
for kp=1:NP
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
continue
end
%�ж��Ƿ���ij������
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
IsInPoly(kp)=true;
continue
end
%ѭ��ÿһ������
for kT=1:NT
if xp<min_TRI_X(kT) || xp>max_TRI_X(kT) || yp<min_TRI_Y(kT) || yp>max_TRI_Y(kT)
continue %������������η�Χ,��ֱ������
end
%�����Ƿ�����������
V1=V1_Sum(kT,:);
V2=V2_Sum(kT,:);
A=[V1',V2'];
B=[xp-TRI_X(kT,1);yp-TRI_Y(kT,1)];
u12=A\B;
if max(u12)<=1 && min(u12)>=0 && sum(u12)<=1
IsInPoly(kp)=true;
break
end
end
end
end
���ֽ���Լ�����ͼ������:
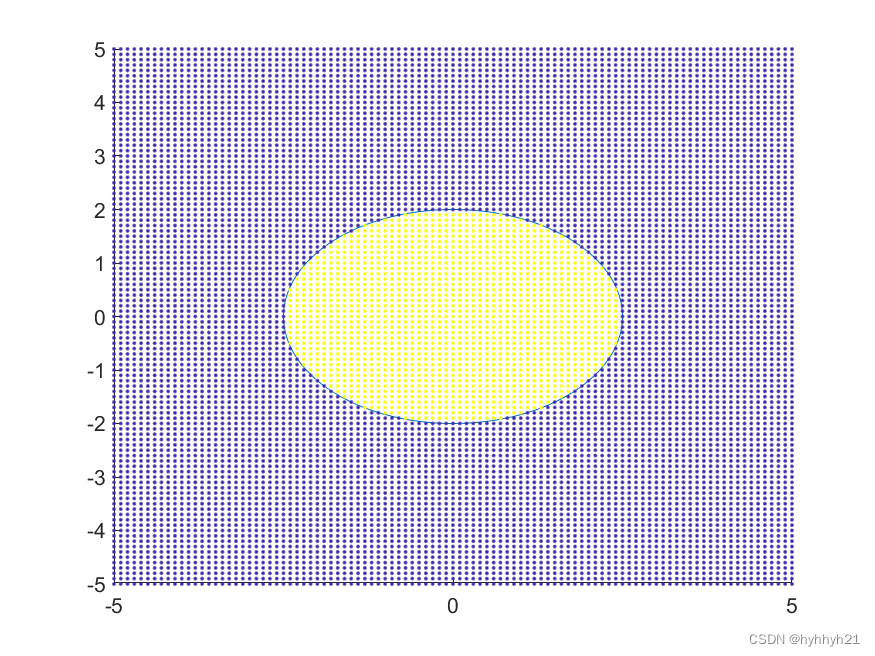
6 ���ַ�(O(logn)�㷨)
�������εı����dz���,����֮ǰ�ķ�������,���Ӷȶ���O(n)�����,Ҫѭ���ı�����ͼ�γ����ȡ�(��Ȼ�о����ͼ�αȽϼ�,�Ż��ȽϺõĻ�,��ô���߷��ͻ���������,�ܶ�߶�ѭ������,Ӧ��Ҳ����̫��)��
��ô���ַ���˼·��������С��Χ,�ҵ������ڵ������㷨ͼʾ����:
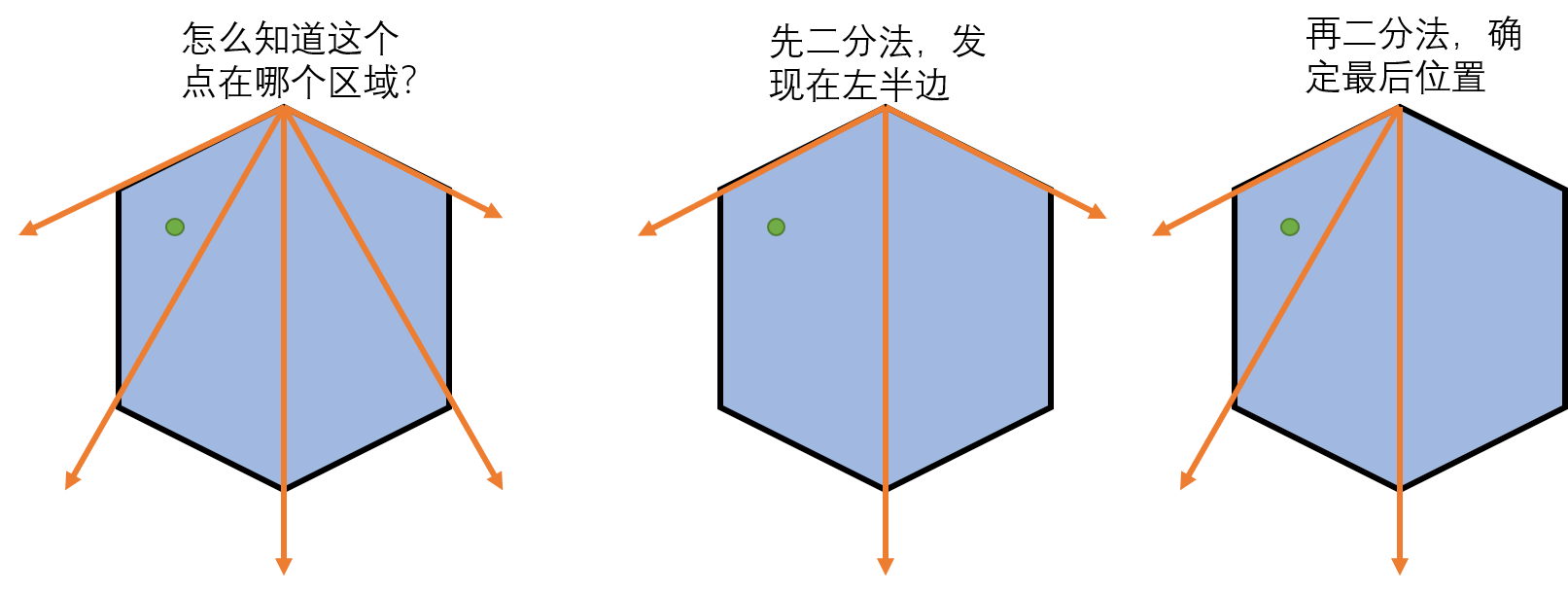
����ȡһ������,Ȼ����������������ߡ�������ڶ������,��ô��һ��������нǷ�Χ֮�ڡ�Ȼ��ͨ������С��Χ,ȷ���������λ�á�
֮��,���ǾͿ�����ǰ���5���жϵ����������ڵķ���,�ж�������Ƿ�������������ڡ�
�����������:
clear
clc
close all
%����ζ���(���߱��밴����β��ӵ�˳��)
%BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%�������
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%�������,�������ཻ
BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%�����
BD=[2.5*cos(0.01:0.01:2*pi)',2*sin(0.01:0.01:2*pi)'];
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
IsInPoly=IfInPoly7(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly7(BD,xy2)
%����7 ���ַ�
NP=size(xy2,1);
BD2=BD;
%1��ʼ������
%ɾ���߽��������ظ��ĵ�
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
BD=BD2;
%���߽���β���
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
BD2=[BD;BD(1,:)];
else %�����ı߽��Ѿ���β���
BD2=BD;
end
%ɾ�����㹲������ĵ�
Is3Line=false(size(BD2,1)-1,1);
for k=2:size(BD2,1)-1
if det([ BD2(k-1,:)-BD2(k,:) ; BD2(k+1,:)-BD2(k,:) ])==0
Is3Line(k)=true;%������㹲��,��������0
end
end
BD2([Is3Line;true],:)=[];%ɾ�����㹲�ߵ���Щ��
if det([ BD2(end,:)-BD2(1,:) ; BD2(2,:)-BD2(1,:) ])==0
BD2(1,:)=[];%�ղ�ѭ��û���жϵ�һ����,�����ж�һ��
end
NB=size(BD2,1);
%����ߵķ�����˳ʱ�뷽��,������ʱ��������
xy0=BD2(1,:);
v1_t=BD2(2,:)-xy0;
v2_t=BD2(NB,:)-xy0;
if det([v1_t;v2_t])<eps
BD2=flipud(BD2);%С��0,˵�������ĵ���˳ʱ�������
end
IsInPoly=false(NP,1);
IsOnBD=false(NP,1);%�Ƿ��ڱ�����
%�ж��������ߵĴ�ŷ�Χ
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%2ȷ����ʼ�ߺ���ֹ��
%�Ե�һ������Ϊ����,��������е������
vSum=BD2(2:end,:)-ones(NB-1,1)*BD2(1,:);
Nv=size(vSum,1);
for kp=1:NP
%3�Ż�,���ټ�������
%���������xy�����������ߵ�xy,��϶����ڱ�����
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xp<min_X_BD || xp>max_X_BD || yp<min_Y_BD || yp>max_Y_BD
continue
end
%�ж��Ƿ���ij������
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%�������ij����Ե����,��֤�����ڱ�Ե
IsInPoly(kp)=true;
continue
end
%�ж��Ƿ����������߷�Χ��
v0_t=xy_k-BD2(1,:);
v1_t=vSum(1,:);
v2_t=vSum(Nv,:);
if det([v1_t;v0_t])>=0 && det([v0_t;v2_t])>=0
%����������нǷ�Χ��,��ʼ�����Ķ��ַ�ѭ��
n1=1;
n2=Nv;
else
continue
end
%4��ʼ�ö��ַ��ж��Ƿ���������
while n2-n1>1 %���������1��ʱ��,��������
v1_t=vSum(n1,:);
v2_t=vSum(n2,:);
n3=fix((n1+n2)/2);
v3_t=vSum(n3,:);
if det([v1_t;v0_t])>=0 && det([v0_t;v3_t])>=0
%�ڵ�һ������
n1=n1;
n2=n3;
else %�ڵڶ�������
n1=n3;
n2=n2;
end
end
%5���ַ�������,ȷ���õ��Ƿ�������������Χ�ɵ���������,
v1_t=vSum(n1,:);
v2_t=vSum(n2,:);
A=[v1_t',v2_t'];
B=[xp-BD2(1,1);yp-BD2(1,2)];
u12=A\B;
if max(u12)<=1 && min(u12)>=0 && sum(u12)<=1
IsInPoly(kp)=true;%������������������,��֤�����ڶ������
end
end
end
���ս������:
7 �������֮��
����漰���������֮������ϵ,��������������Ľ��������,�����ֳ���Ҫѡ�������
������ͼ,��չʾ������ͼ���ཻ��,����������ȡ�Ľ��:
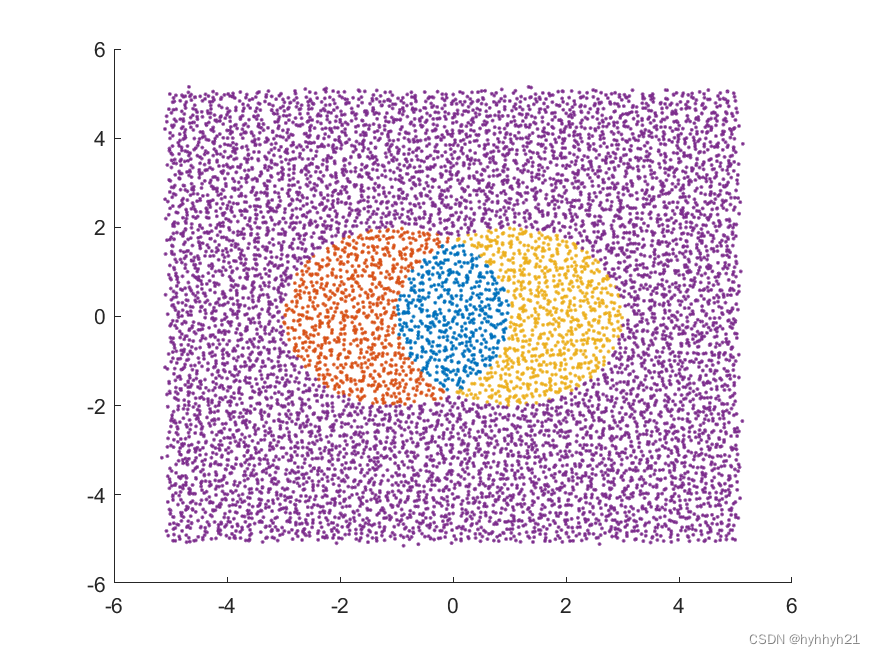
��������:
%����ζ���(���߱��밴����β��ӵ�˳��)
BD1=[2*cos(0.01:0.01:2*pi)'-1,2*sin(0.01:0.01:2*pi)'];
BD2=[2*cos(0.01:0.01:2*pi)'+1,2*sin(0.01:0.01:2*pi)'];
%Ҫ�жϵĵ�
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
X=X+randn(size(X))*0.05;
Y=Y+randn(size(Y))*0.05;
xy2=[X(:),Y(:)];
%�жϵ��Ƿ���ͼ����
IsInPoly1=inpolygon(xy2(:,1),xy2(:,2),BD1(:,1),BD1(:,2));
IsInPoly2=inpolygon(xy2(:,1),xy2(:,2),BD2(:,1),BD2(:,2));
%����
Area1=and(IsInPoly1,IsInPoly2);
Area2=and(IsInPoly1,~IsInPoly2);
Area3=and(~IsInPoly1,IsInPoly2);
Area4=and(~IsInPoly1,~IsInPoly2);
figure()
hold on
scatter(xy2(Area1,1),xy2(Area1,2),24,1*ones(sum(Area1),1),'Marker','.')
scatter(xy2(Area2,1),xy2(Area2,2),24,2*ones(sum(Area2),1),'Marker','.')
scatter(xy2(Area3,1),xy2(Area3,2),24,3*ones(sum(Area3),1),'Marker','.')
scatter(xy2(Area4,1),xy2(Area4,2),24,4*ones(sum(Area4),1),'Marker','.')
colormap(lines(4))

