��һ���Ǹ��ݲο���+�ϰ���ʵ�ֱ��ϵľֲ��滮
��һ�ڵ�����,ȷ���滮���������frenet����ϵ�µ� ����ÿ���滮������ ����ο������궼�û�һ��,��÷���; ������ֽ�����frenet����ϵ�µ�, ��headingҲ��frenet����ϵ�µ�,��ʵ����dl/ds,Ҳ����l�� Ҳ���Dzο��ߵ����ߺ�s�������ɵļн�,��ò�Ҫ����Ϊheading,��Ȼ���ʹ������ϵ��ͻ
������,�ٴ���֤�滮�;���֮��Ĺ�ϵ:ȫ�־���-ȫ�ֹ滮,�ֲ�����-�ֲ��滮
��һ��:�ο���,�ṩ�⻬��frenet������(�ο��߲���ȫ��·����,��ȫ��·�����Ż�,û��ô��,��ƽ��,��Ҫһֱ����)
(�����˼�ǰѲο��ߵ�xy����д������,�����Ժ����ο���frenet����ϵ,����������ο��ο��ߵõ�s-l���ꡣ ����ֱ�ӰѲο���frenet�����˰�,��frenet������!!!)����һ��xy����תfrenet����Ҳ�����вο�����xy�µ�(x,y,theta,kappa)����,ֻ��֮ǰѧ����ת����ʱ��Ĭ�����ֵ�Ѿ�����
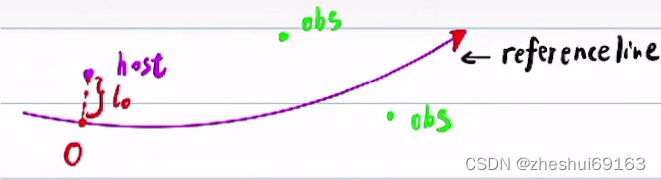
������host��referenceline��ͶӰΪ����ԭ��,����frenet����ϵ
(����Ҫ��������ϵ��!����ͶӰ�����ڷ���������(����ԭ��),֮ǰ��ûɶ����)
��˵,���ԭ���Ƕ�̬����?����ֻ�dz�ʼλ��,����ÿ���滮���ڵ�λ��,����ÿʱÿ�̵�λ��?��ÿ���滮�����ڵ�,��Ϊÿ���滮�����ڵIJο��߶��DZ仯��,��ʼ��Ҳ��������ȷ����
�ϰ���ͶӰ������SLͼ(�����Ŀ����Ϊ�˺������)����Ҳ���ϰ���ͶӰ��,Ϊɶ֮ǰ�IJο����㷨����ͶӰֻ������һ����?��Ϊǰ���Dzο���ģ��,�����DZ���ģ��
���ڿ�ʼ�滮(��Ϊ���ϰ���������Ҫ�滮)
1.0ȷ���滮�����(����˼��):
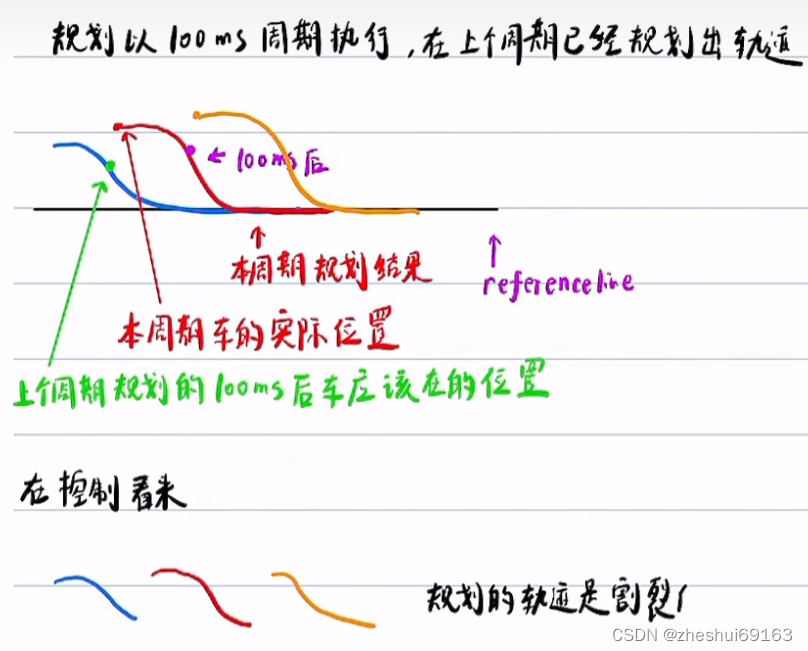
����ǰ��ʵ��λ����(0,l_0),���ⲻ����Ϊ�滮�����,��Ϊ�����Dz�������,�ϴι滮��ʱ��,�滮����ɫ�Ĺ켣,�����ϰ�������켣�������Ӧ������ɫ��λ��,�������ʵ�ں�ɫ��λ��;�������ڹ滮����㰴ʵ�ʺ�ɫλ����Ϊ���滮����ɫ������,�������ơ���ʵ���ڵ�һ������,�ǿ��������ɵ�!��
�ᵼ�´��ϸ�����-������-��������,�����滮���Ĺ켣�Ǹ��ѵ���ᵼ�¿�����������ǰ��ת�Ƿ���ͻ��,���ڰ�ȫ���� emmm���ͻ������Ϊ ������б�ʺ��̵㲻һ��,������һ����������?����˵ֻҪ����,��ʹб�����Ҳ������?Ӧ�û�������,�������Ļ�����ô��?������Ŀ��λ�þͲ�һ����,���Ʋ��͵����Ͽ�,�������̫Զ��,������������ Ϊɶ�Ӻ�㴦������Ҫ��ƽһ�ΰ�?Ӧ���Ǿ�����ƽҲ��
1.1ȷ���滮�����(��ȷ����)
1.1.1������,���Ե�ǰʵ��λ�����滮���,
������Ҳ���ܿ���������ԭ��ÿ���Ǹ���ÿ�ι滮���ڵij���λ�õ�,����frenet����ϵ�Ǹ���ÿ�滮�����ڳ���λ�ö�̬�仯��
���氡,������Ҳ�ͻ��ǹ켣��������?��,��û�취,ֻ������,��������������ԭ���Ĺ켣��,�����켣���ѵ�
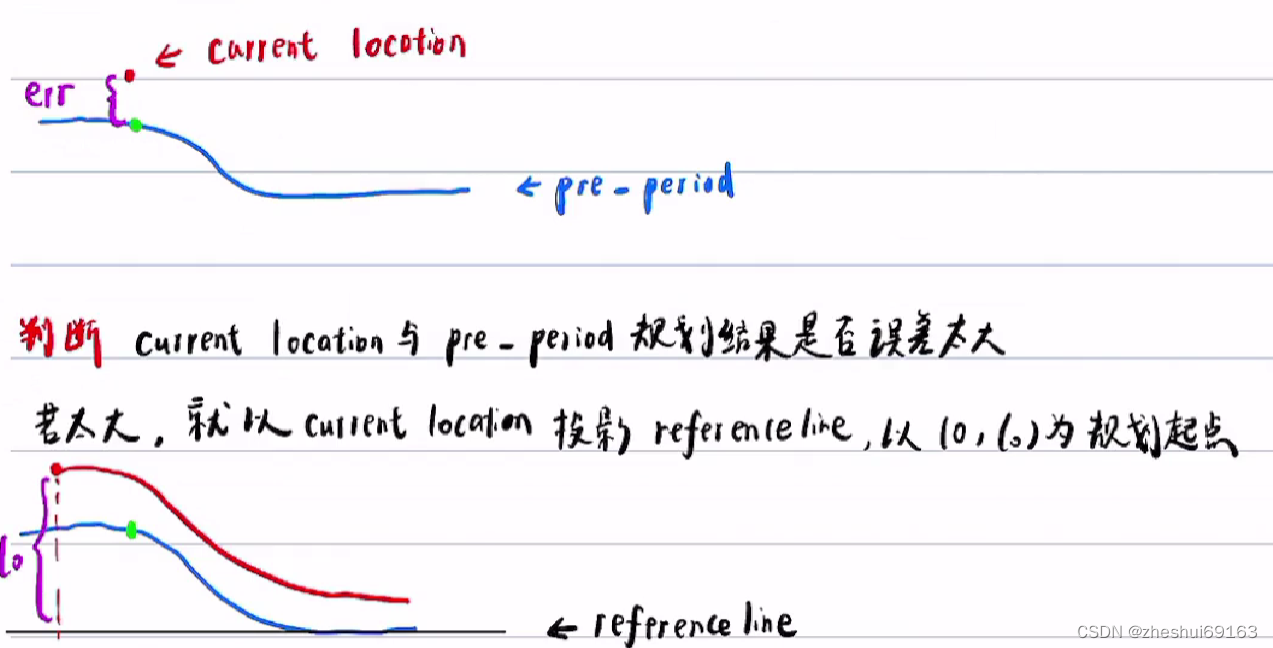
1.1.2������,��1:�Ե�ǰʵ��λ��ͶӰ���ϸ����ڹ滮�켣P(s_0,l_0); ��2:�� ������ɫ�����滮���

1.1.2.1 ���ڷ�1:���ɵ�����ֲ�·������������(����һ���ɵ�)
����˵:�� 05:19 ��ʼ���Ĺ滮�����㷨��ʵ����ȷ,��ȷ�Ĺ켣�滮������㷨Ӧ�ð��յڶ��µ�����(��)�ķ���!!!!!!!!!!!!��Ϊ�����������滮����ǻ��ڵ�ǰλ�õ�,���ǹ�,Ӧ����Ԥ��100ms����Ϊ���!!!
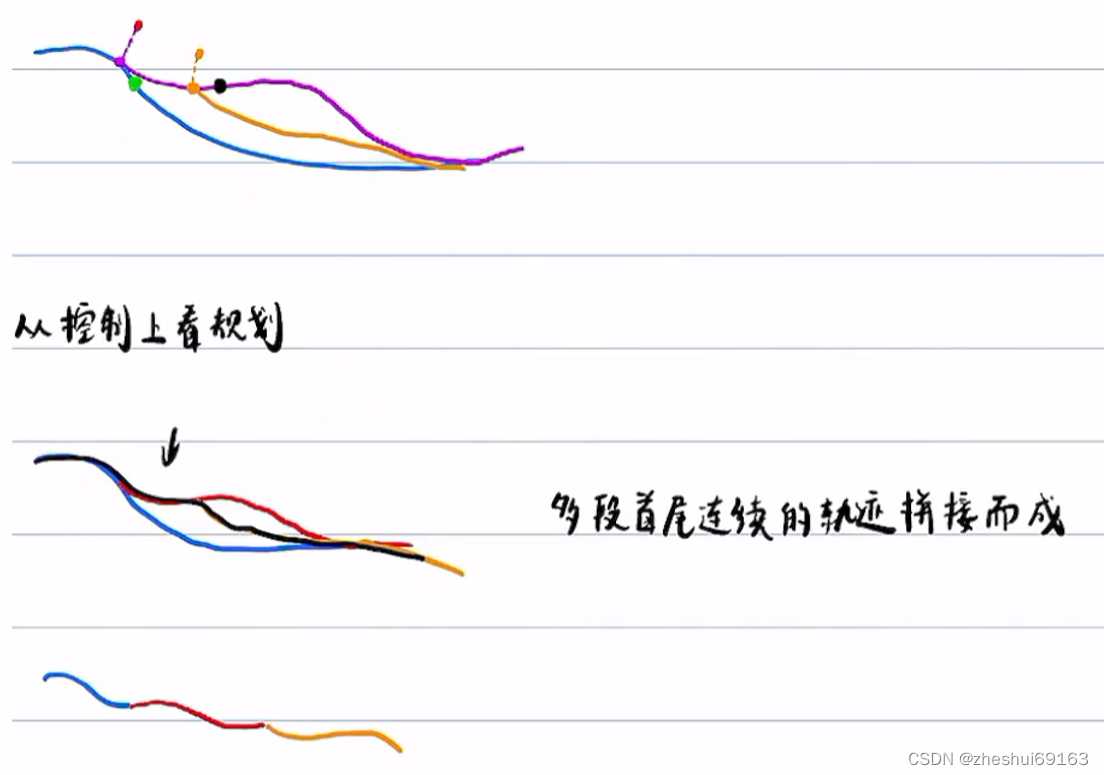
2. ȷ����滮���֮��,�����������ϰ���----�滮�켣
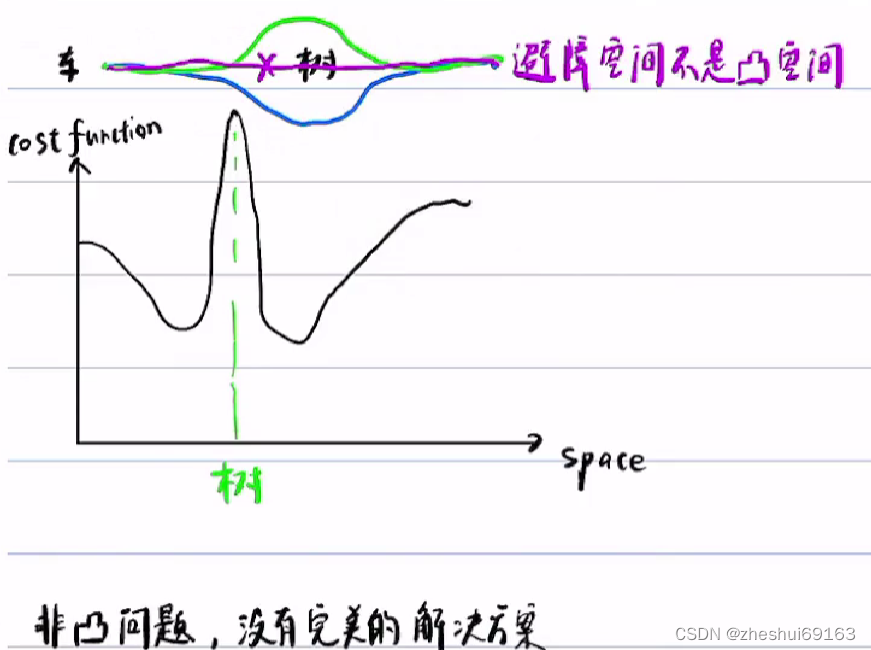
��������3�����ű�,�����ö��ι滮���,�����ι滮�Ƿ��ġ�����cost function ����,��space������λ��,��ʧ�Ǻܴ��,���������������������cost function�ļ�Сֵ��

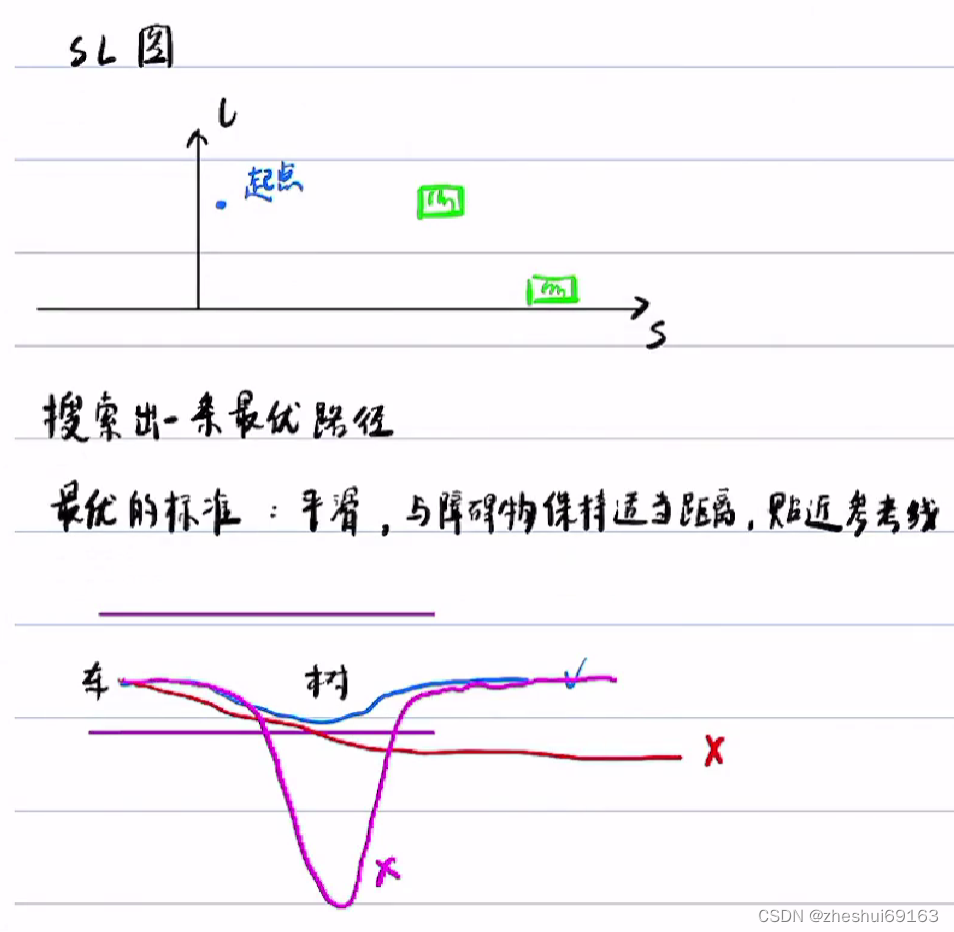
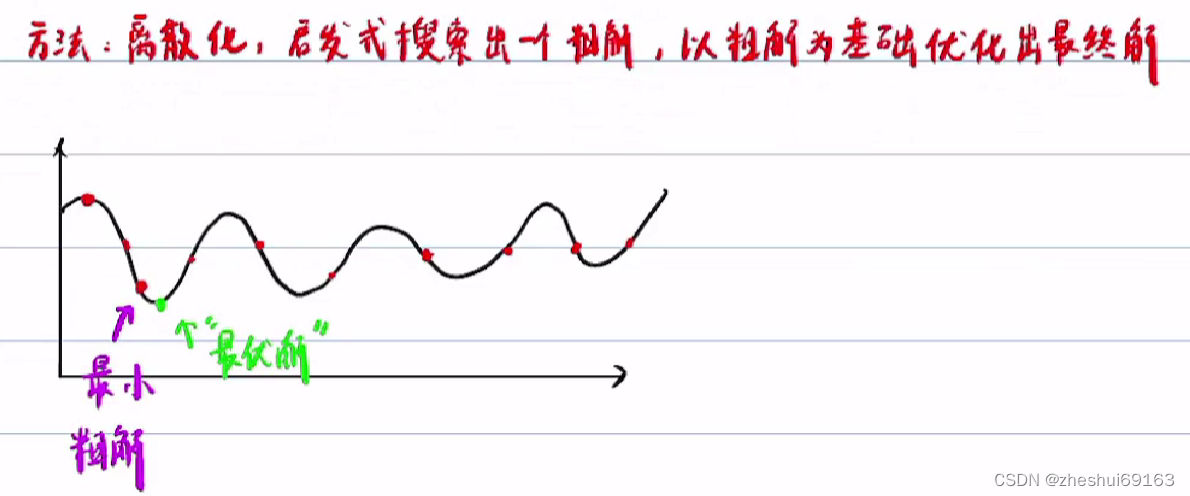
2.1�������:����������ɢ��,����ʽ�����ֽ�,��ʵ����Ҵֽ������ʵ���Ǿ��ߵĹ���
���߾�����������;ѡ������/�ҵı�����ѡ����/���ռ���Ϊ��ռ�;��:����ѡ�Ĵֽ�����/�ҿռ�,�ֽ����ĸ��ռ�,��ѡ���ĸ��ռ���Ϊ�����ռ�
ȱ��:�ܵ������ܶ���Լ
2.2������˵:
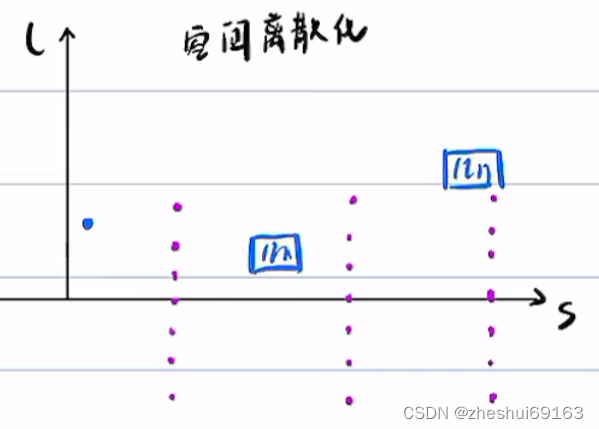
2.2.1 ÿ�������һ������,�ں�������һЩ��,Ȼ������ɢ�ռ�������,�����Ź켣(cost function��С,���ֽ�,ע��ֽⲻ�ǵ��,�ǹ켣!!!)(����ɢ�ռ��е�����·����Ϊ�ֽ�)���������ָl������
2.2.1 ��ɢ�ռ���������·��(cost function��С),������·��������һ���ռ�,���ڴ��ռ��������ι滮(��ɢ�ռ������·����Ϊ�ֽ�,�ֽ���ռ�,�ڴ��ռ����Ż������ս�)������զȷ���ռ�
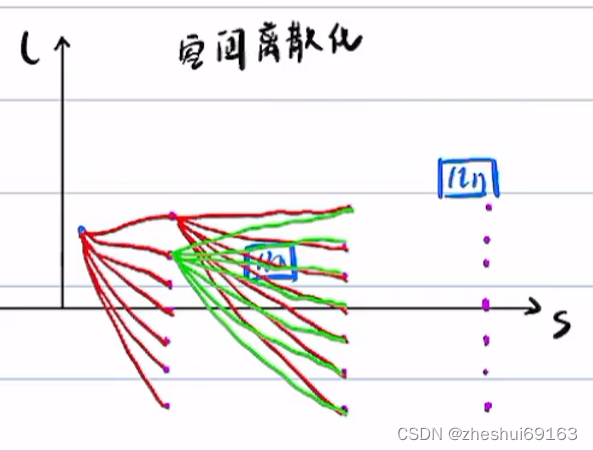
�������ɢ�ռ����ҵ��ֽ�?��̬�滮(���ڽ�)
�ֽ���ôȷ���ռ�?
������ռ����Ż������ս�? ���ι滮(��һ�ڽ�)
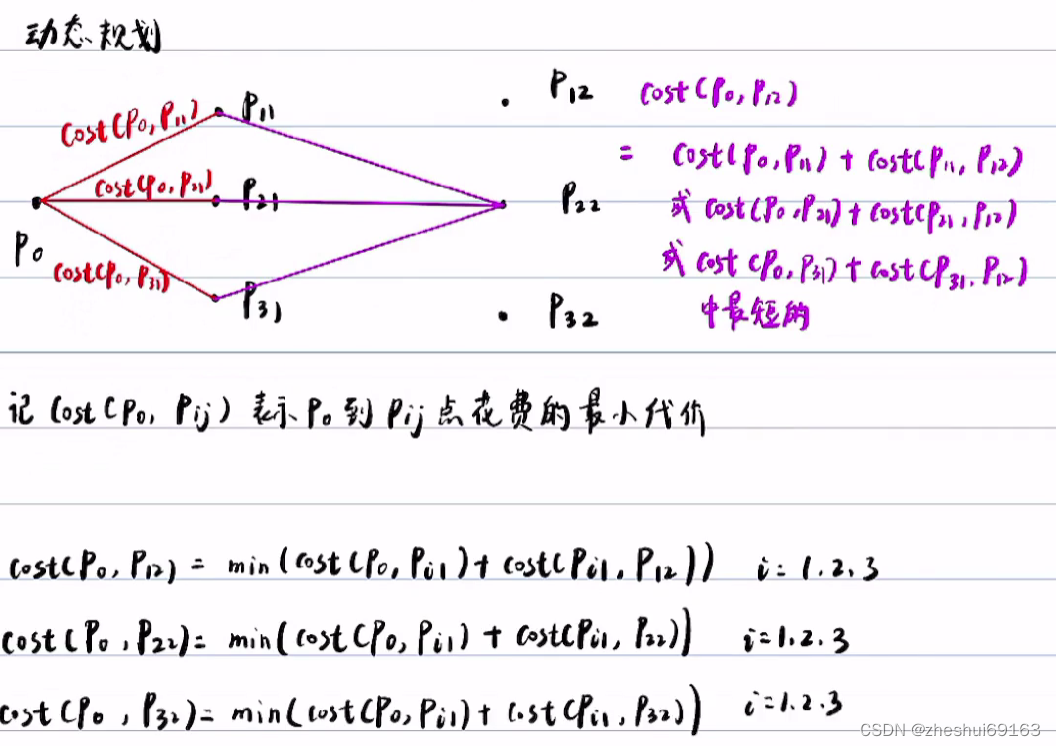
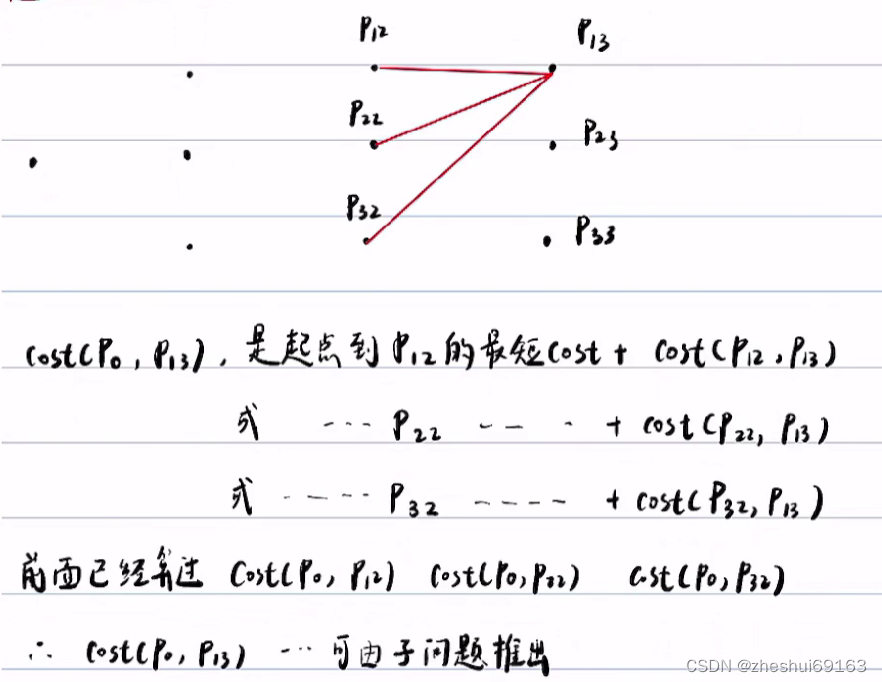
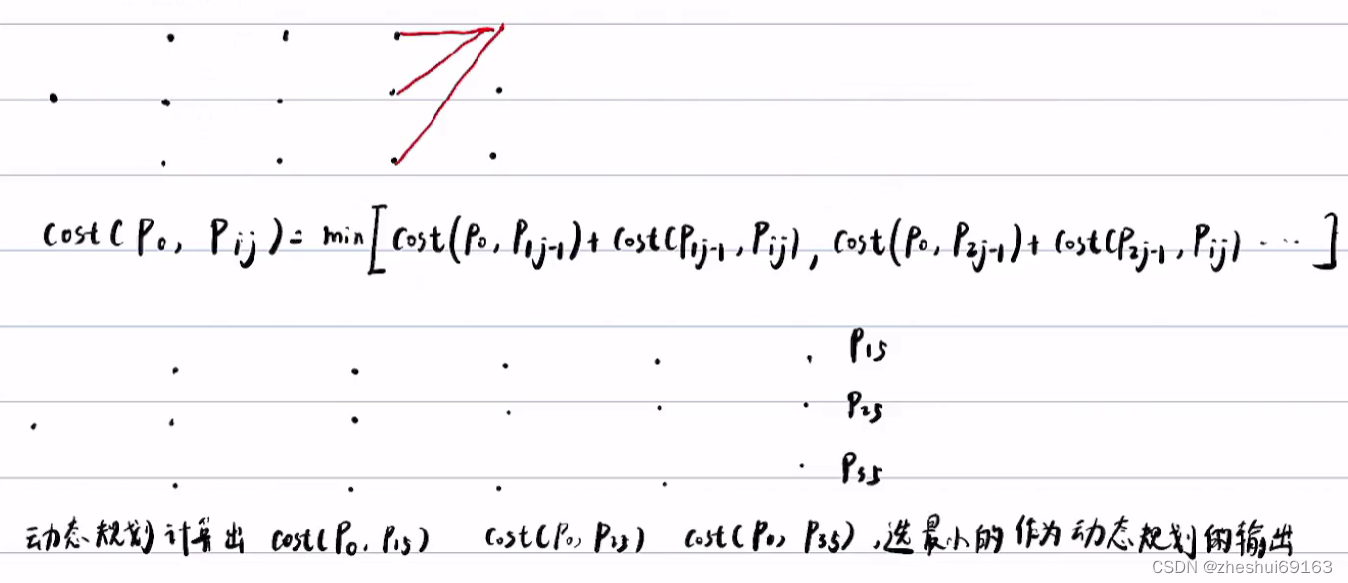
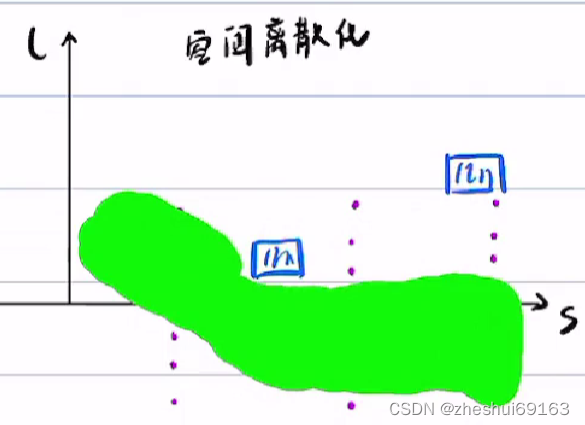
3������ɢ�ռ����ҵ��ֽ�C��̬�滮
�����ɢȡ���ʱ�������᷽�� s�������,��ô��ֱ��s1 s2��,����Ҫs11 s12��,��,������!
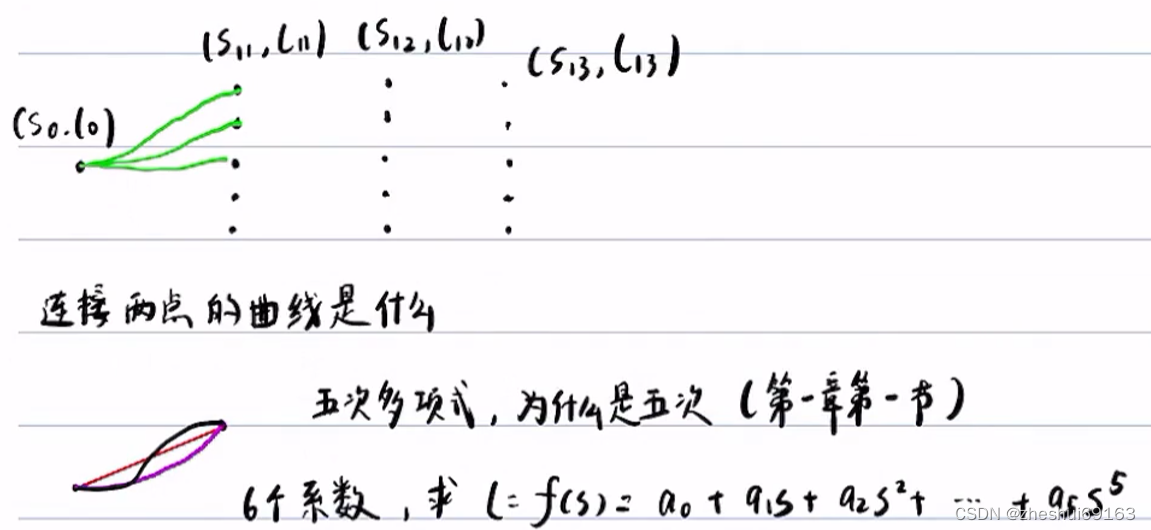
��������,ԭ���Ƶ���ζ���ʽ�Ǹ���ʱ������,�����Ǹ���λ������,�����Ȼ�����ٶ�Լ��?���Ǻ����Լ��,����������һ���¹�,��Ϊ��һ�������ϵ�,��֮ǰ�Ƶ��������ٶȴ�Сû�йܷ���(����������һ����,��ԭ��һ��,֮ǰ�dz�ĩʱ����λ�á��ٶȡ����ٶȵ�����,������ζ���ʽ;�������dz�ĩλ�ú�б�ʵ�Լ��,�����dz�ĩ�Ķ���Ҳ����6��Լ��,����Ҳ����ζ���ʽ)
����û��f��'=0,��Ϊһ��Լ����f����������f����=0,������˵,�����Dz���������һ��ֵ?����û��Լ��,дҲֻ��Ϊ�����?��������Ҳ������˵��,���������� ������0,Ҳ���㲻ͬ�߶μ���ν��ˡ� ��Ȼ˵������һ�������е�Ķ���ֱ��=0,����ֻ����Ϊû��ֵ���Ը�,�����Ͽ��Ը�����ֵ,������������û�����Լ��,���Խ�����һ�κ����Dz��е�
headingҲ��frenet����ϵ�µ�,��ʵ����dl/ds,Ҳ����l�� Ҳ���Dzο��ߵ����ߺ�s�������ɵļн�
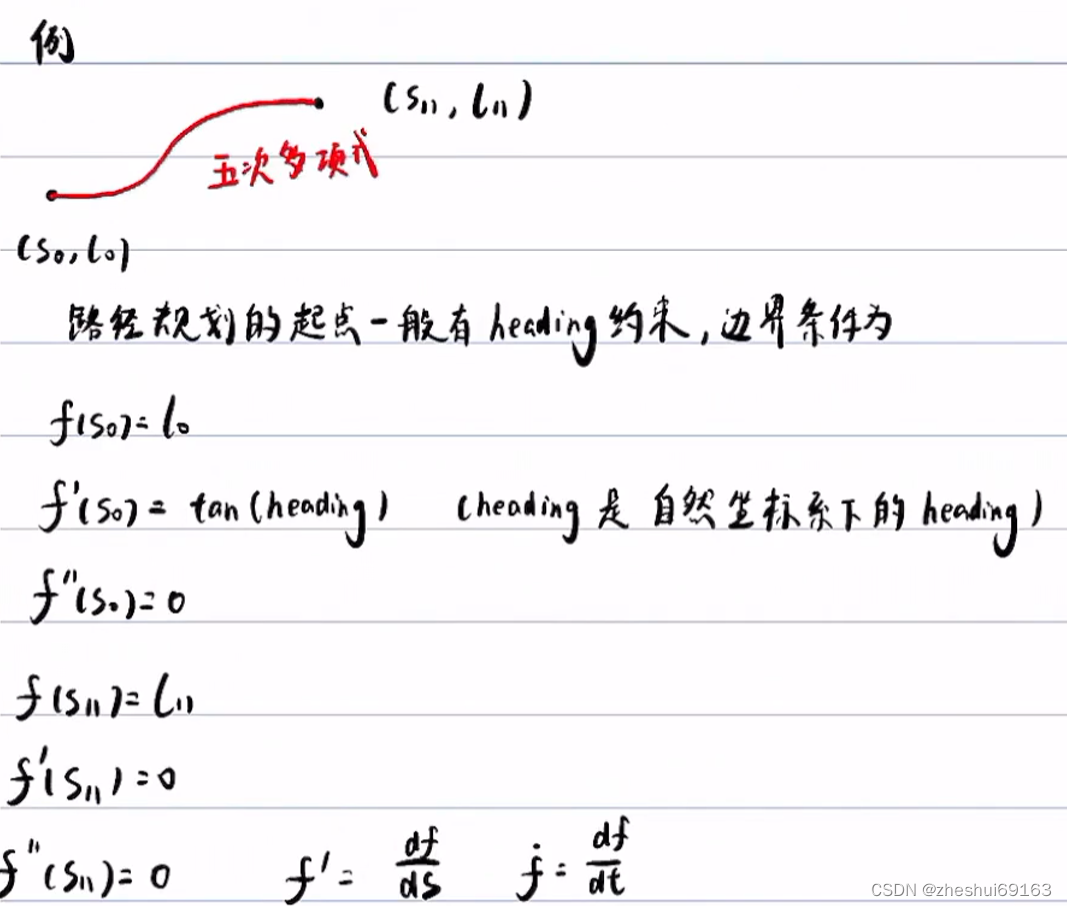
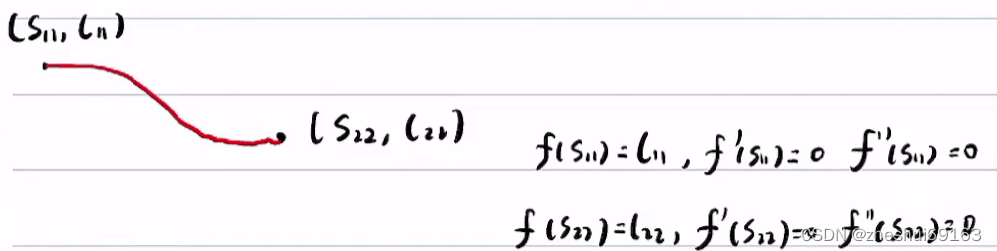
�������г�ʼ�㺽���Լ�������,��ֱ��û�г�ʼ���ֱ��һ������=0(��Ϊ������Ǵֽ�,��������Ŀ����Ϊ�˿����ռ�,��������ⳤ��ʲô������Ҫ,������Ϊ�����ռ�����),����:
3.1 �������·�������ӨCcost function
֮ǰ��ȫ��·���òο��ߵ�����ָ��:��ɢ���ƽ�����߶ζ̡� ԭʼ�켣�����
���� ������ָ��:��������ƽ�����ϰ�����롢�ο��߾����
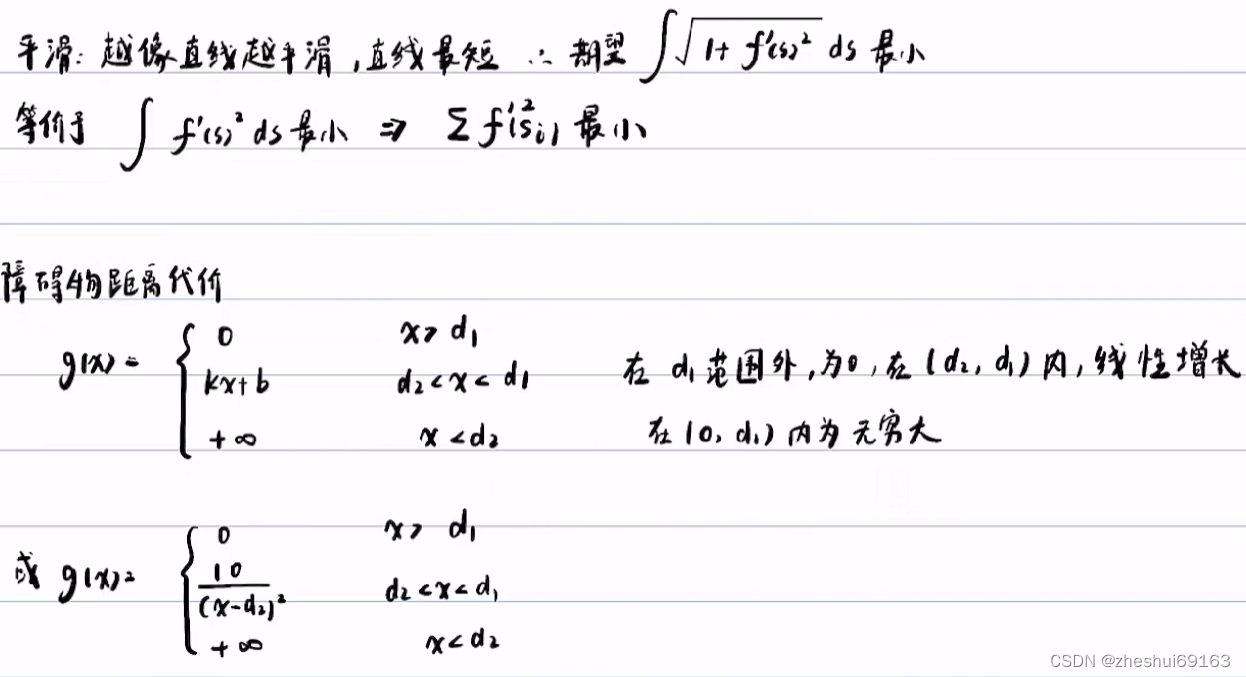
����ƽ��:��Ϊ�滮����ȫ��·������ɢ�ĵ�,�������ı�������������,����ֲ�·���滮���Ƕ����ζ���ʽ,������ζ���ʽ֮����ƽ����,��Ϊ������=0,����ֱ�����С���ֻ����һ����������,�����Ҳ����������������ɢȡ�����
���ھ���: ==֮ǰ�������߶γ�,Ϊɶ���ﲻ�ÿ���????????==��Ȼ�����ǿ϶�Ҫ���Ǻ��ϰ���ľ���ġ�Ҳ����������������ɢȡ�����
���ڲ�ֵ����:֮ǰ����ɢ�ĵ�ֱ�����ֵ�͡�������������������ȡ��ɢ��,Ȼ�����ֵ��
ǰ�����ζ���ʽ������Ϊ���ó���������,�����ٵı����ϻ�����ɢ�ĵ㡣 �������ζ���ʽֻ��Ϊ�˺����ܼ�ȡ��ĺ����ԡ�����ֱ�Ӳ�����ֱ����ÿ�����costfunction��,�����������ϳ����˶�����
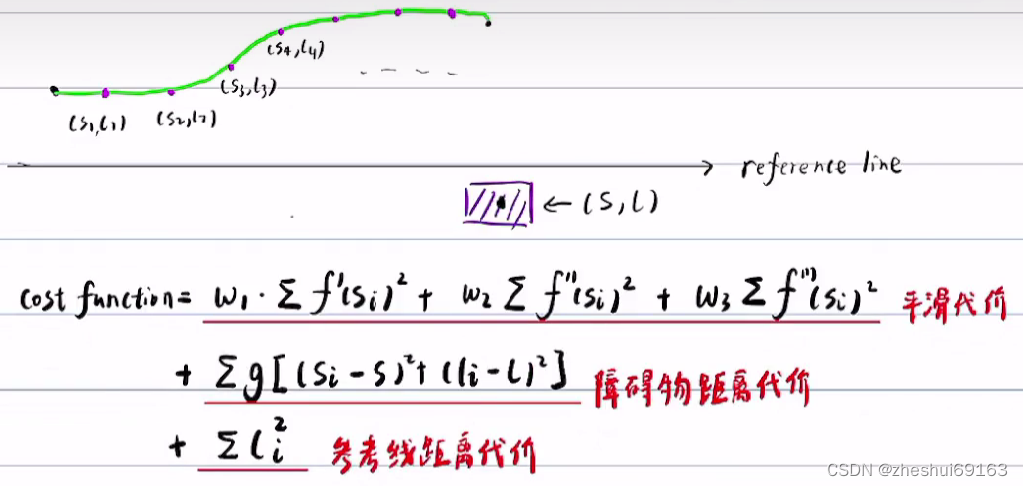
�������������Ľ���,����ƽ��,ƽ��Ҳ����Ϊ���������,Ҳ����xxxx,���Ҳ����\sum f �� ^2��С
�ϰ�����뺯��g�ж�����ʽ,ֻҪ����,С����d2�ڴ�������,Զ����d1�����Ϊ0,һ����Χd2~d1��,�������ž���ļ�С������,�������һ����������,���Ի�ͼ������
ÿ��·�����ж�Ӧ��cost,����ͱ����ͼ�����·��������(��Ϊÿһ�ζ��Ƕ�����,�о���һ��ȡmin����������,������dijkstra,��!����Ϊ��·û��ô�鷳,���Բ���dijkstraҲ����)
������������DZ���,ֻ�Ǵ�������ÿһ�㶼ȡmin��,��������ʵ�ְѸ�������ֳɼ����⡾����Ƕ�̬�滮,ÿ��ֻ���Ǿֲ�,�õ���ֵ�ٴ�����һ�㡿