排序
选择排序 O(n2)
从后面选择最小的一个元素放到前面已排序的队列中
template<typename T>
void selectionSort(T arr[], int n) {
for (int i = 0; i < n; i++) {
//寻找[i,n)区间里的最小值
int minIndex = i;
for (int j = i + 1; j < n; j++)
if (arr[j] < arr[minIndex])
minIndex = j;
swap(arr[i], arr[minIndex]);
}
}插入排序 O(n2)
当前元素,在前面已排序的队列中选择一个合适的位置插入
0位置已经自带排好序属性
对于相对有序的数组中,插入排序性能优越
void insertionSort(T arr[], int n) {
for (int i = 1; i < n; i++) {
//寻找元素arr[i]合适的插入位置
T e = arr[i];
int j;//j保存元素e应该插入的位置
for (j = i; j > 0 && arr[j-1] > e; j--) {
arr[j]=arr[j-1];
}
arr[j] = e;
}
}归并排序 O(nlogn)
迭代分半,排序,再归并排序
需要额外的临时存储空间

// 将arr[l...mid]和arr[mid+1...r]两部分进行归并
template<typename T>
void __merge(T arr[], int l, int mid, int r){
//* VS不支持动态长度数组, 即不能使用 T aux[r-l+1]的方式申请aux的空间
//* 使用VS的同学, 请使用new的方式申请aux空间
//* 使用new申请空间, 不要忘了在__merge函数的最后, delete掉申请的空间:)
T aux[r-l+1];
//T *aux = new T[r-l+1];
for( int i = l ; i <= r; i ++ )
aux[i-l] = arr[i];
// 初始化,i指向左半部分的起始索引位置l;j指向右半部分起始索引位置mid+1
int i = l, j = mid+1;
for( int k = l ; k <= r; k ++ ){
if( i > mid ){ // 如果左半部分元素已经全部处理完毕
arr[k] = aux[j-l]; j ++;
}
else if( j > r ){ // 如果右半部分元素已经全部处理完毕
arr[k] = aux[i-l]; i ++;
}
else if( aux[i-l] < aux[j-l] ) { // 左半部分所指元素 < 右半部分所指元素
arr[k] = aux[i-l]; i ++;
}
else{ // 左半部分所指元素 >= 右半部分所指元素
arr[k] = aux[j-l]; j ++;
}
}
}
// 递归使用归并排序,对arr[l...r]的范围进行排序
template<typename T>
void __mergeSort(T arr[], int l, int r){
if( l >= r )
return;
int mid = (l+r)/2;
__mergeSort(arr, l, mid);
__mergeSort(arr, mid+1, r);
if(arr[mid]>arr[mid+1])
__merge(arr, l, mid, r);
}
template<typename T>
void mergeSort(T arr[], int n){
__mergeSort( arr , 0 , n-1 );
}快速排序 O(nlogn)
选出一个数作为基点,将数列中元素小于基点的放前面,大于基点的元素放后面,迭代
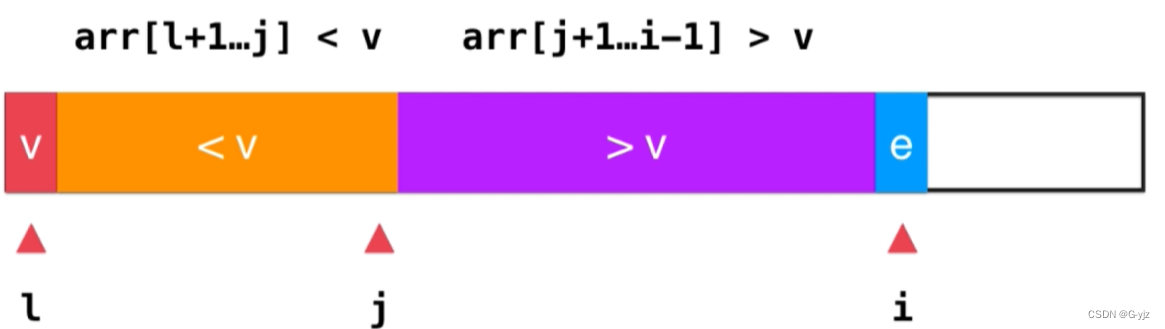
// 对arr[l...r]部分进行partition操作
// 返回p, 使得arr[l...p-1] < arr[p] ; arr[p+1...r] > arr[p]
template <typename T>
int _partition(T arr[], int l, int r){
// 随机在arr[l...r]的范围中, 选择一个数值作为标定点pivot
swap( arr[l] , arr[rand()%(r-l+1)+l] );
T v = arr[l];
int j = l;
for( int i = l + 1 ; i <= r ; i ++ )
if( arr[i] < v ){
j ++;
swap( arr[j] , arr[i] );
}
swap( arr[l] , arr[j]);
return j;
}
// 对arr[l...r]部分进行快速排序
template <typename T>
void _quickSort(T arr[], int l, int r){
// 对于小规模数组, 使用插入排序进行优化
if( r - l <= 15 ){
insertionSort(arr,l,r);
return;
}
int p = _partition(arr, l, r);
_quickSort(arr, l, p-1 );
_quickSort(arr, p+1, r);
}
template <typename T>
void quickSort(T arr[], int n){
srand(time(NULL));
_quickSort(arr, 0, n-1);
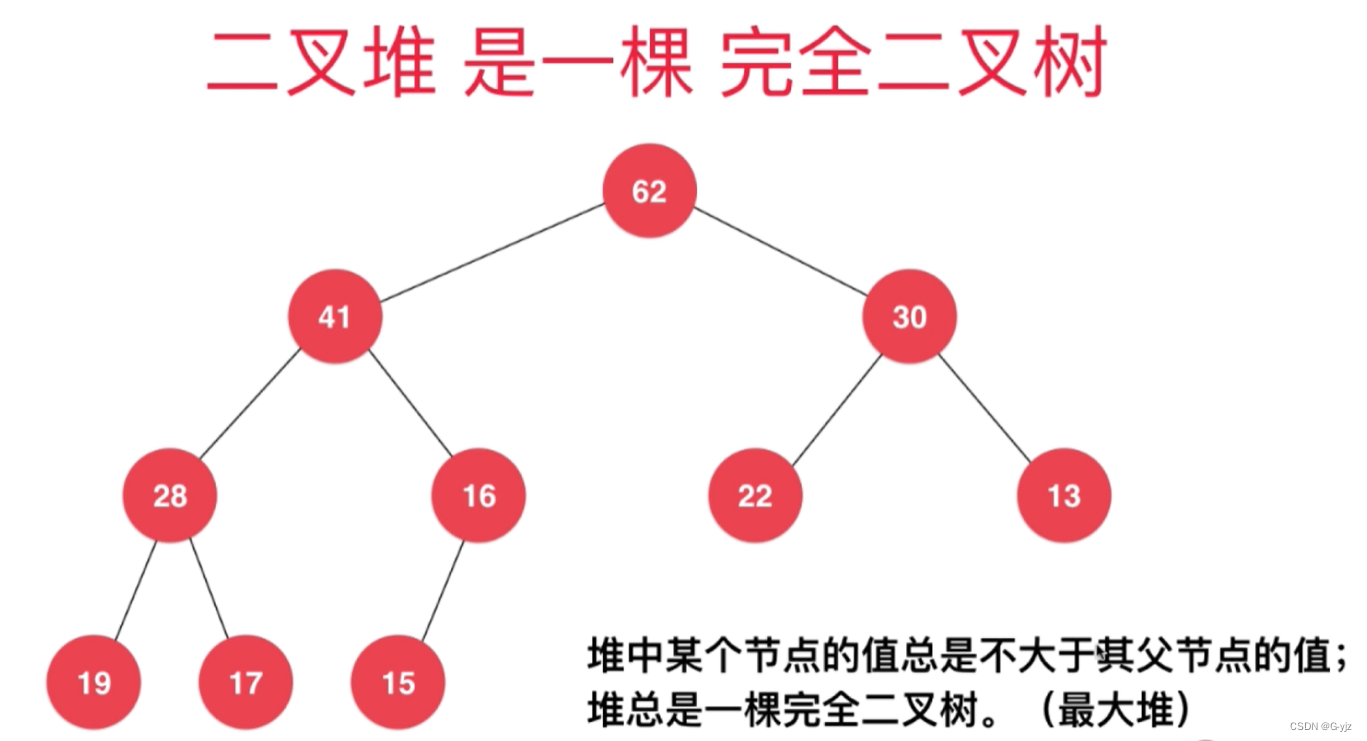
}堆 O(nlogn)
树形结构以树主形式存储,只关注最大或最小值
?
?
template<typename Item>
class MaxHeap{
private:
Item *data;
int count;
int capacity;
void shiftUp(int k){
while( k > 1 && data[k/2] < data[k] ){
swap( data[k/2], data[k] );
k /= 2;
}
}
void shiftDown(int k){
while( 2*k <= count ){
int j = 2*k; // 在此轮循环中,data[k]和data[j]交换位置
if( j+1 <= count && data[j+1] > data[j] )
j ++;
// data[j] 是 data[2*k]和data[2*k+1]中的最大值
if( data[k] >= data[j] ) break;
swap( data[k] , data[j] );
k = j;
}
}
public:
// 构造函数, 构造一个空堆, 可容纳capacity个元素
MaxHeap(int capacity){
data = new Item[capacity+1];
count = 0;
this->capacity = capacity;
}
~MaxHeap(){
delete[] data;
}
// 返回堆中的元素个数
int size(){
return count;
}
// 返回一个布尔值, 表示堆中是否为空
bool isEmpty(){
return count == 0;
}
// 像最大堆中插入一个新的元素 item
void insert(Item item){
assert( count + 1 <= capacity );
data[count+1] = item;
shiftUp(count+1);
count ++;
}
// 从最大堆中取出堆顶元素, 即堆中所存储的最大数据
Item extractMax(){
assert( count > 0 );
Item ret = data[1];
swap( data[1] , data[count] );
count --;
shiftDown(1);
return ret;
}
// 获取最大堆中的堆顶元素
Item getMax(){
assert( count > 0 );
return data[1];
}
};C++优先队列使用_堆的方法
#include <iostream>
#include <queue>
#include <ctime>
using namespace std;
int main() {
srand(time(NULL));
// 默认的priority queue, 底层是最大堆
priority_queue<int> pq;
for(int i = 0 ; i < 10 ; i ++){
int num = rand() % 100;
pq.push(num);
cout << "insert " << num << " in priority queue." << endl;
}
while(!pq.empty()){
cout << pq.top() << " ";
pq.pop();
}
cout << endl << endl;
// 使用greater的priority queue, 底层是最小堆
priority_queue<int, vector<int>, greater<int>> pq2;
for(int i = 0; i < 10; i ++){
int num = rand() % 100;
pq2.push(num);
cout << "insert " << num << " in priority queue." << endl;
}
while(!pq2.empty()){
cout << pq2.top() << " ";
pq2.pop();
}
cout << endl << endl;
// 使用自定义Comparator的priority queue
priority_queue<int, vector<int>, function<bool(int,int)>> pq3(myCmp);
for(int i = 0; i < 10; i ++){
int num = rand() % 100;
pq3.push(num);
cout << "insert " << num << " in priority queue." << endl;
}
while(!pq3.empty()){
cout << pq3.top() << " ";
pq3.pop();
}
return 0;
}查找
二分查找

// 二分查找法,在有序数组arr中,查找target
// 如果找到target,返回相应的索引index
// 如果没有找到target,返回-1
template<typename T>
int binarySearch(T arr[], int n, T target){
// 在arr[l...r]之中查找target
int l = 0, r = n-1;
while( l <= r ){
//int mid = (l + r)/2;
// 防止极端情况下的整形溢出,使用下面的逻辑求出mid
int mid = l + (r-l)/2;
if( arr[mid] == target )
return mid;
if( arr[mid] > target )
r = mid - 1;
else
l = mid + 1;
}
return -1;
}二分搜索树

?
#include <iostream>
#include <queue>
#include <cassert>
// 二分搜索树
template <typename Key, typename Value>
class BST{
private:
// 树中的节点为私有的结构体, 外界不需要了解二分搜索树节点的具体实现
struct Node{
Key key;
Value value;
Node *left;
Node *right;
Node(Key key, Value value){
this->key = key;
this->value = value;
this->left = this->right = NULL;
}
Node(Node *node){
this->key = node->key;
this->value = node->value;
this->left = node->left;
this->right = node->right;
}
};
Node *root; // 根节点
int count; // 树中的节点个数
public:
// 构造函数, 默认构造一棵空二分搜索树
BST(){
root = NULL;
count = 0;
}
// 析构函数, 释放二分搜索树的所有空间
~BST(){
destroy( root );
}
// 返回二分搜索树的节点个数
int size(){
return count;
}
// 返回二分搜索树是否为空
bool isEmpty(){
return count == 0;
}
// 向二分搜索树中插入一个新的(key, value)数据对
void insert(Key key, Value value){
root = insert(root, key, value);
}
// 查看二分搜索树中是否存在键key
bool contain(Key key){
return contain(root, key);
}
// 在二分搜索树中搜索键key所对应的值。如果这个值不存在, 则返回NULL
Value* search(Key key){
return search( root , key );
}
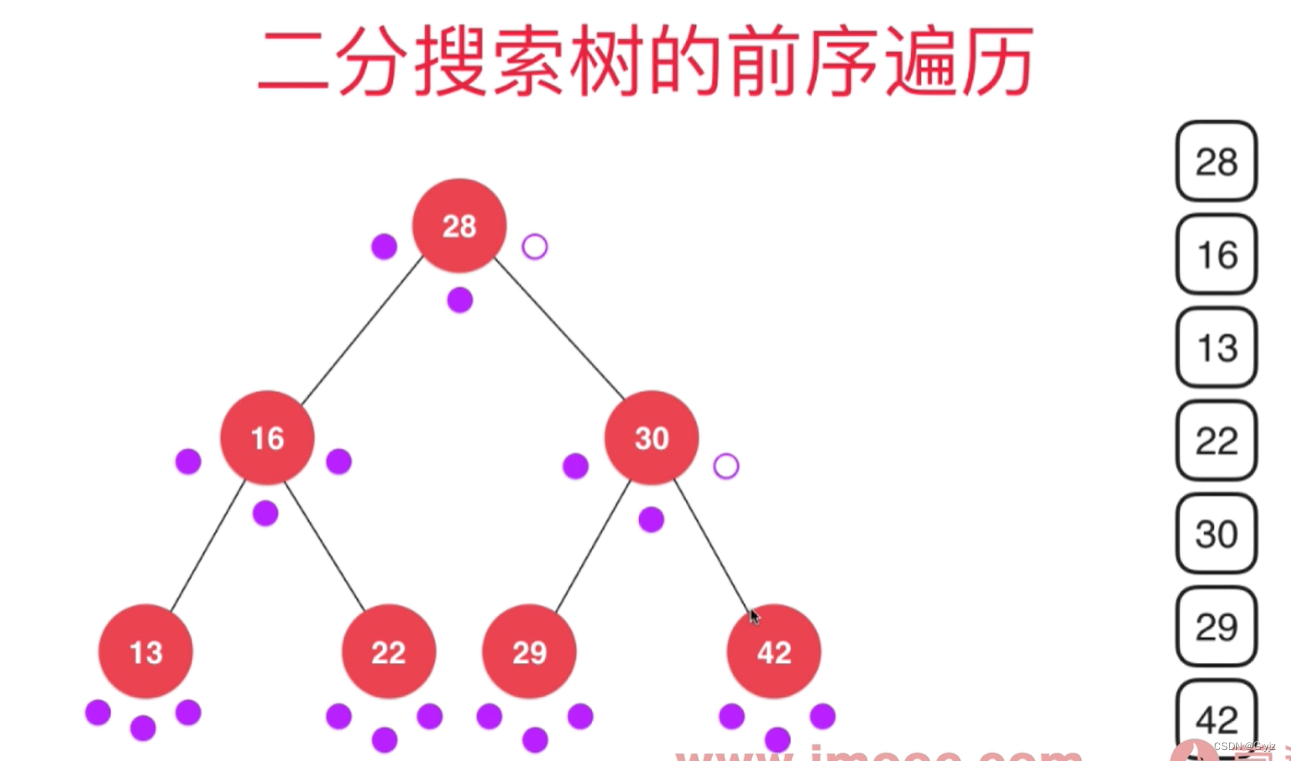
// 二分搜索树的前序遍历
void preOrder(){
preOrder(root);
}
// 二分搜索树的中序遍历
void inOrder(){
inOrder(root);
}
// 二分搜索树的后序遍历
void postOrder(){
postOrder(root);
}
// 二分搜索树的层序遍历
void levelOrder(){
queue<Node*> q;
q.push(root);
while( !q.empty() ){
Node *node = q.front();
q.pop();
cout<<node->key<<endl;
if( node->left )
q.push( node->left );
if( node->right )
q.push( node->right );
}
}
// 寻找二分搜索树的最小的键值
Key minimum(){
assert( count != 0 );
Node* minNode = minimum( root );
return minNode->key;
}
// 寻找二分搜索树的最大的键值
Key maximum(){
assert( count != 0 );
Node* maxNode = maximum(root);
return maxNode->key;
}
// 从二分搜索树中删除最小值所在节点
void removeMin(){
if( root )
root = removeMin( root );
}
// 从二分搜索树中删除最大值所在节点
void removeMax(){
if( root )
root = removeMax( root );
}
// 从二分搜索树中删除键值为key的节点
void remove(Key key){
root = remove(root, key);
}
private:
// 向以node为根的二分搜索树中, 插入节点(key, value), 使用递归算法
// 返回插入新节点后的二分搜索树的根
Node* insert(Node *node, Key key, Value value){
if( node == NULL ){
count ++;
return new Node(key, value);
}
if( key == node->key )
node->value = value;
else if( key < node->key )
node->left = insert( node->left , key, value);
else // key > node->key
node->right = insert( node->right, key, value);
return node;
}
// 查看以node为根的二分搜索树中是否包含键值为key的节点, 使用递归算法
bool contain(Node* node, Key key){
if( node == NULL )
return false;
if( key == node->key )
return true;
else if( key < node->key )
return contain( node->left , key );
else // key > node->key
return contain( node->right , key );
}
// 在以node为根的二分搜索树中查找key所对应的value, 递归算法
// 若value不存在, 则返回NULL
Value* search(Node* node, Key key){
if( node == NULL )
return NULL;
if( key == node->key )
return &(node->value);
else if( key < node->key )
return search( node->left , key );
else // key > node->key
return search( node->right, key );
}
// 对以node为根的二分搜索树进行前序遍历, 递归算法
void preOrder(Node* node){
if( node != NULL ){
cout<<node->key<<endl;
preOrder(node->left);
preOrder(node->right);
}
}
// 对以node为根的二分搜索树进行中序遍历, 递归算法
void inOrder(Node* node){
if( node != NULL ){
inOrder(node->left);
cout<<node->key<<endl;
inOrder(node->right);
}
}
// 对以node为根的二分搜索树进行后序遍历, 递归算法
void postOrder(Node* node){
if( node != NULL ){
postOrder(node->left);
postOrder(node->right);
cout<<node->key<<endl;
}
}
// 释放以node为根的二分搜索树的所有节点
// 采用后续遍历的递归算法
void destroy(Node* node){
if( node != NULL ){
destroy( node->left );
destroy( node->right );
delete node;
count --;
}
}
// 返回以node为根的二分搜索树的最小键值所在的节点, 递归算法
Node* minimum(Node* node){
if( node->left == NULL )
return node;
return minimum(node->left);
}
// 返回以node为根的二分搜索树的最大键值所在的节点, 递归算法
Node* maximum(Node* node){
if( node->right == NULL )
return node;
return maximum(node->right);
}
// 删除掉以node为根的二分搜索树中的最小节点, 递归算法
// 返回删除节点后新的二分搜索树的根
Node* removeMin(Node* node){
if( node->left == NULL ){
Node* rightNode = node->right;
delete node;
count --;
return rightNode;
}
node->left = removeMin(node->left);
return node;
}
// 删除掉以node为根的二分搜索树中的最大节点, 递归算法
// 返回删除节点后新的二分搜索树的根
Node* removeMax(Node* node){
if( node->right == NULL ){
Node* leftNode = node->left;
delete node;
count --;
return leftNode;
}
node->right = removeMax(node->right);
return node;
}
// 删除掉以node为根的二分搜索树中键值为key的节点, 递归算法
// 返回删除节点后新的二分搜索树的根
Node* remove(Node* node, Key key){
if( node == NULL )
return NULL;
if( key < node->key ){
node->left = remove( node->left , key );
return node;
}
else if( key > node->key ){
node->right = remove( node->right, key );
return node;
}
else{ // key == node->key
// 待删除节点左子树为空的情况
if( node->left == NULL ){
Node *rightNode = node->right;
delete node;
count --;
return rightNode;
}
// 待删除节点右子树为空的情况
if( node->right == NULL ){
Node *leftNode = node->left;
delete node;
count--;
return leftNode;
}
// 待删除节点左右子树均不为空的情况
// 找到比待删除节点大的最小节点, 即待删除节点右子树的最小节点
// 用这个节点顶替待删除节点的位置
Node *successor = new Node(minimum(node->right));
count ++;//下面的count删除了两次,这次弥补
successor->right = removeMin(node->right);
successor->left = node->left;
delete node;
count --;
return successor;
}
}
};?
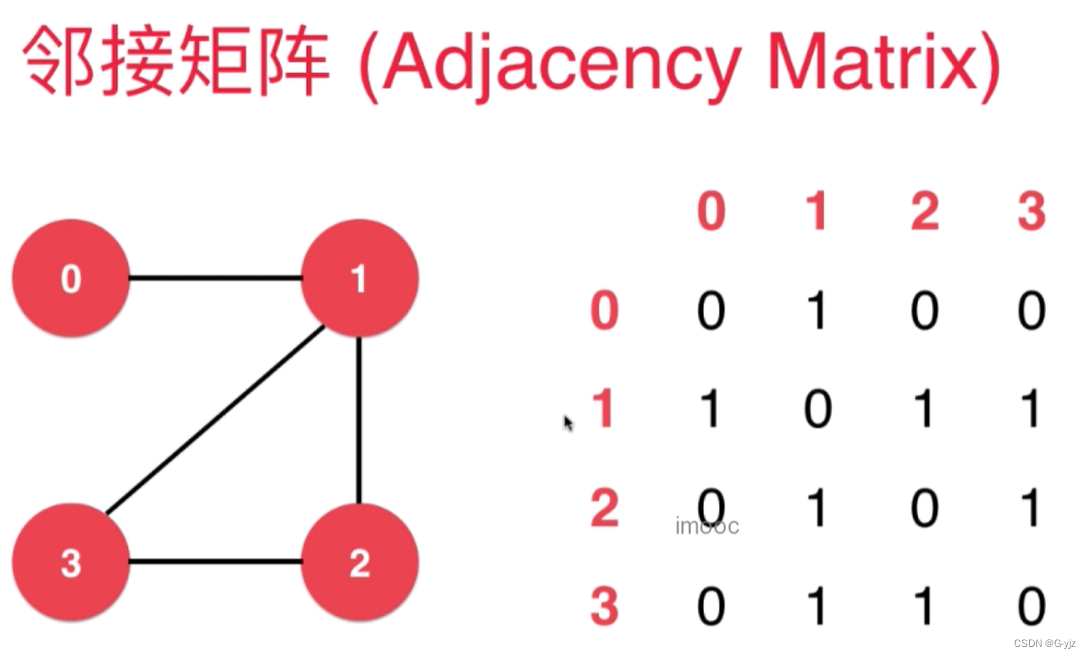
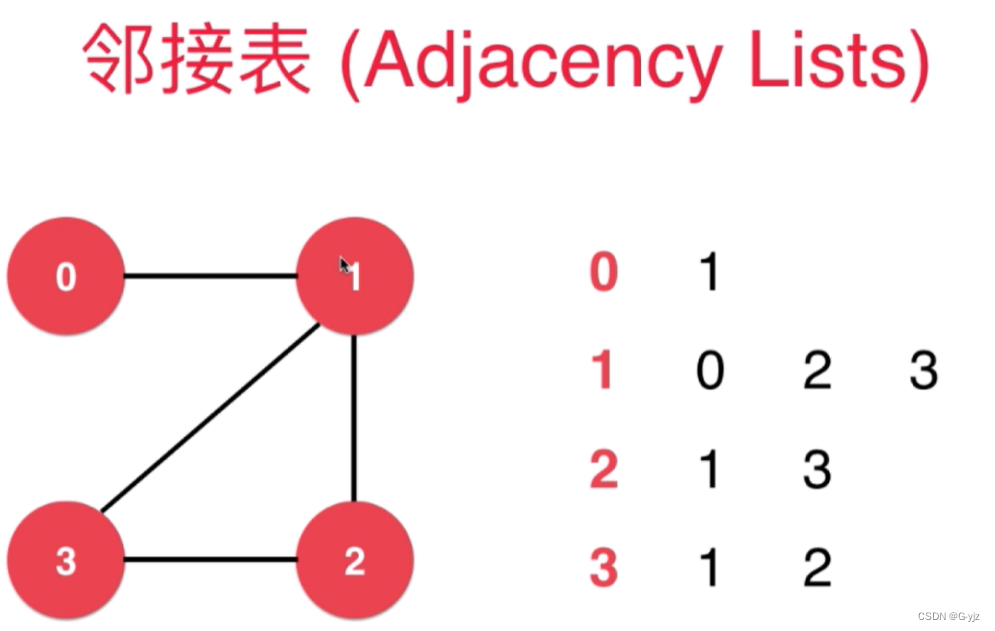
图
邻接矩阵、邻接表
?
?
?
?
#稠密图 - 邻接矩阵
#include <iostream>
#include <vector>
#include <cassert>
using namespace std;
// 稠密图 - 邻接矩阵
class DenseGraph{
private:
int n, m; // 节点数和边数
bool directed; // 是否为有向图
vector<vector<bool>> g; // 图的具体数据
public:
// 构造函数
DenseGraph( int n , bool directed ){
assert( n >= 0 );
this->n = n;
this->m = 0; // 初始化没有任何边
this->directed = directed;
// g初始化为n*n的布尔矩阵, 每一个g[i][j]均为false, 表示没有任和边
g = vector<vector<bool>>(n, vector<bool>(n, false));
}
~DenseGraph(){ }
int V(){ return n;} // 返回节点个数
int E(){ return m;} // 返回边的个数
// 向图中添加一个边
void addEdge( int v , int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
if( hasEdge( v , w ) )
return;
g[v][w] = true;
if( !directed )
g[w][v] = true;
m ++;
}
// 验证图中是否有从v到w的边
bool hasEdge( int v , int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
return g[v][w];
}
};#稀疏图 - 邻接表
???????
#include <iostream>
#include <vector>
#include <cassert>
using namespace std;
// 稀疏图 - 邻接表
class SparseGraph{
private:
int n, m; // 节点数和边数
bool directed; // 是否为有向图
vector<vector<int>> g; // 图的具体数据
public:
// 构造函数
SparseGraph( int n , bool directed ){
assert( n >= 0 );
this->n = n;
this->m = 0; // 初始化没有任何边
this->directed = directed;
// g初始化为n个空的vector, 表示每一个g[i]都为空, 即没有任和边
g = vector<vector<int>>(n, vector<int>());
}
~SparseGraph(){ }
int V(){ return n;} // 返回节点个数
int E(){ return m;} // 返回边的个数
// 向图中添加一个边
void addEdge( int v, int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
g[v].push_back(w);
if( v != w && !directed )
g[w].push_back(v);
m ++;
}
// 验证图中是否有从v到w的边
bool hasEdge( int v , int w ){
assert( v >= 0 && v < n );
assert( w >= 0 && w < n );
for( int i = 0 ; i < g[v].size() ; i ++ )
if( g[v][i] == w )
return true;
return false;
}
};