一、一些补充的概念
-
如果具有n个结点的图中是一个环,则会有n个不同的生成树,每个生成树有n-1条边
-
连通、连通图、连通分量:路径,无向图 ,极大连通子图为连通分量,边数小于n-1,则图必为非连通图。
-
线性表可以是空表,一个元素也没有;树可以是空树,一个结点也没有但图不可以一个顶点也没有,所谓空图是指图中的边数为零。图的顶点集合一定非空,而边集合可以为空。
-
顶点的度是指与顶点相关联的边数,对于有向图,还要区分出度和入度
-
在有向图中的边是有向的,<x, y>与<y, x>是不同的两条边。在无向图中的边是无向的, (x.y)与(y,x)是同一条边。
-
顶点之间的路径用一个顶点序列标识。无权图的路径长度用所经过边的条数标识,带权图的路径长度用所经过边上的权值之和标识。
-
连通性一般指的是在无向图中的性质,而在有向图情形要考虑的是强连通性。
-
图的生成树是由顶点和顶点之间关系组成的连通图。有n个顶点,必有n-1
条边将它们连通。要注意的是,这种生成树不能是空树。 -
从非强连通的有向图和非连通的无向图通过遍历得到的是生成森林。
-
不像线性表,元素之间有前趋后继关系:也不像树、结点之间有父子分层关系:在图中各个顶点之间的地位是平等的因此可以按照需要,对图中顶点重新编号。
-
稀疏图的边数远少于图的顶点数的平方,稠密图则不是
-
在无向图中,顶点v被称作一个关节点,当且仅当删除v以及依附于v的所有边之后,图将被分割成至少两个连通分量。
-
对一个图G进行遍历可以得到不同的遍历序列,那么导致得到的遍历序列不唯一的因素有哪些?
导致遍历序列不唯一的因素有:
(1) 由于途中每个顶点可能有多个邻接点,使得遍历序列不唯一
(2) 遍历的出发点不同,遍历序列也不同
(3) 如果采用邻接表存储,由于各边链入顺序任意,同一个图的存储表示不唯一,遍历结果也可能不唯一。 -
图的深度优先搜索是一个递归的过程,而广度优先搜索为何是非递归的过程?
广度优先搜索的过程是从图的某个顶点出发,围绕该顶点一圈一圈访问图中所有顶点的过程,与树的逐层访问类似,因此他不用递归实现,只需利用队列迭代式实现。 -
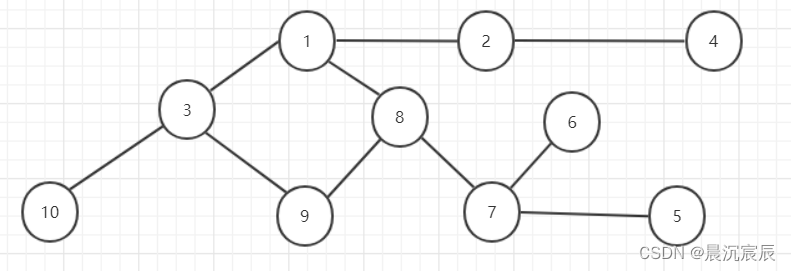
(1)画出上图以顶点1为根的DFS生成树
(2)如果有关节点,请找出所有的关节点 1,2,3,7,8
(3)如果想把该连通图变成双连通图,需要消除所有关节点,那么至少在图中加几条边?如何加?
至少三条边。一条边是(9, 10),一条边是(4, 6), 一条边是(5, 6)
-
构造最小生成树的三条准则:
(1)有n个顶点的生成树仅有n-1条边
(2)不能使用产生回路的边。
(3) 树的总代价最小。 -
构造最小生成树的方法:prim 和 kruskal
-
建立最小生成树的要点
如果连通带权图中各边上的权值互不相等,构造出来的最小生成树是唯一的;如果存在权值相等的边,若采用邻接表存储,由于选择边的次序不同,构造出来的最小生成树是不唯一的,不过它们总的权值之和应相同。若采用邻接矩阵存储,则结果是唯一的。 -
若带权连通图中有权值为负的边,使用prim或kruskal仍可构造最小生成树。
-
在什么情况下.对同一连通网络使用Prim算法与Kruskal算法,得到的最小生成树会不同?
答:当带权连通图(连通网络)中具有相同较小权值的几条边形成回路时,两个算法由于选边的次序不同:可能生成不同的最小生成树。 -
对于一个连通网络,具有最小权值的顶点是否一定在最小生成树上?具有次小权直、第三小权值的顶点情况又如何?
答:如果连通网络各条边上的权值互不相同,具有最小或次小权值的边一定在最小生成树上,具有第三小权值的边就不-定,要看它是否与具有最小和次小权值的顶点构成回路。如果连通网络中有多条具有最小或次小权值的边,且构成了回路,有部分具有最小或次小权值的边可能不在最小生成树上,具有第三小权值的边更不一定了。 -
求单源最短路径的Dijkstra算法
-
求各个顶点之间最短路径的Floyd算法(如果不会Floyd,也可以把每一个顶点作为源点,使用Dijstra算法)
-
Dijkstra算法的时间复杂度为O(n2),因为图中几乎所有顶点都要做计算
Floyd算法的时间复杂度为O(n3) -
简述Dijkstra算法与Prim算法的异同?
答: Dijkstra算法是求带权图单源最短路径的算法,Prim算法是求带权图最小生成树的算法,它们的用途不同。Dijkstra算法和Prim算法同属贪心法,它们的工作过程相同,都是逐步递增求解的过程。不同之处在于Dijkstra算法每次比较的是源点到各顶点的路径长度,而Prim算法每次比较的是边上的权值。此外,Dijkstra算法的限制是边上的权值非负,而Prim算法没有这个限制。 -
图中的顶点表示村庄,有向边表示交通路线。若要建立一家医院,试问在哪一个村庄能使各村庄总体上的交通代价最小。
-
拓扑排序操作题要掌握
-
关键路径的简单算法和正规算法都要求掌握
-
什么是拓扑排序?它是针对何种结构的?
答:把一个偏序(有向)图转换为全序图的过程叫做拓扑排序。排序结果把图的所有顶点排在一个拓扑有序的序列中。该序列不但保留了原偏序图中所有顶点的优先关系,而且给原先没有关系的顶点之间也赋予了优先关系。拓扑排序针对AOV网络(工程计划网络) -
对任何AOV网络进行拓扑排序,结果不唯一的影响因素有哪些?
影响因素有三:
(1) 图结构本身的影响。如果图有多个无前趋的顶点,或输出一个顶点并删除该顶点发出的有向边后,出现多个入度为零的顶点,就会产生多个拓扑有序序列。
(2) 图存储结构的影响。采用邻接矩阵存储图,处理出边的次序是唯一的;采用邻接表存储图,处理出边的次序是不唯一的。
(3) 算法所用辅助结构的影响。入度为零的结点可以用栈来组织,也可以用队列来组织,自然算法生成的拓扑有序序列也会不同。 -
拓扑排序的一个重要应用是判断有向图是否有环。如何判断?
每次寻找一个入度为0的顶点,输出它并把所有它发出的边删去,作为这些边的终顶点的入度减一,如此重复,找到所有的顶点全部输出,说明图中没有环;如果过程中还有顶点未输出,但没有入度为0的顶点了,说明图中有环。 -
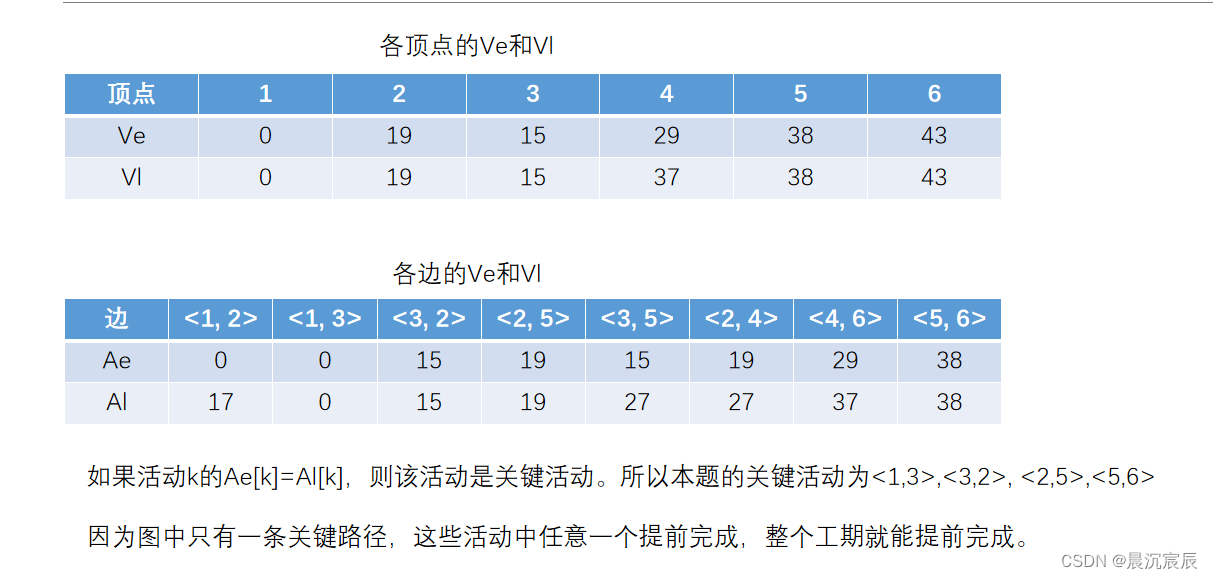
(1) 这个工程最早可能什么时间结束?
(2) 确定哪些是关键活动。画出由所有关键活动构成的图,指出哪些活动加速可使整个工程提前完成。
二、基础算法
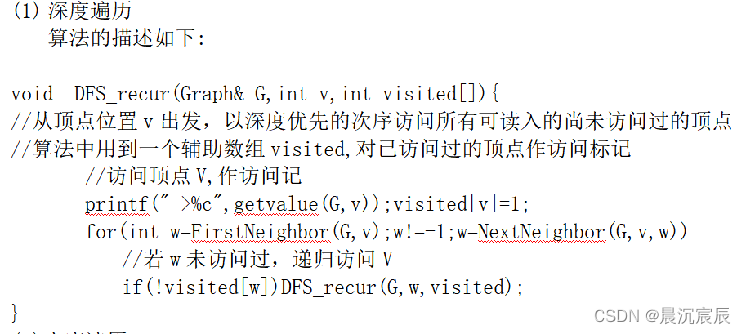
1. 深度遍历
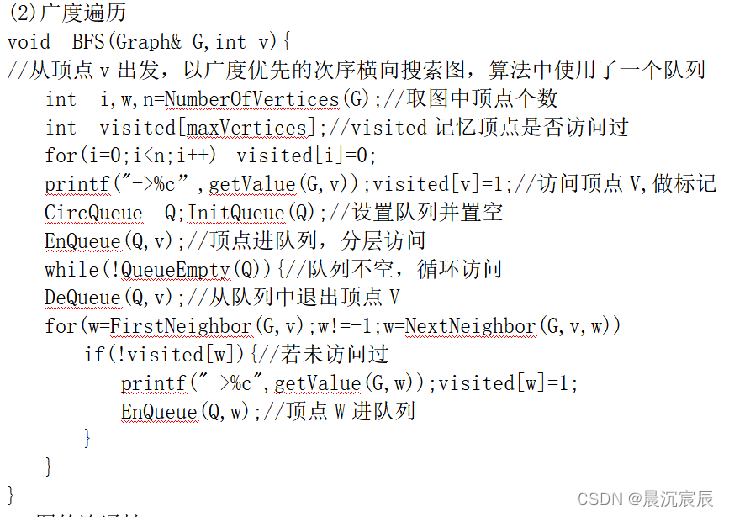
2. 广度遍历
(1) 基础算法
(2)力扣练习题
1) 题目一
1. 题目
被包围的区域
给你一个 m x n 的矩阵 board ,由若干字符 ‘X’ 和 ‘O’ ,找到所有被 ‘X’ 围绕的区域,并将这些区域里所有的 ‘O’ 用 ‘X’ 填充。
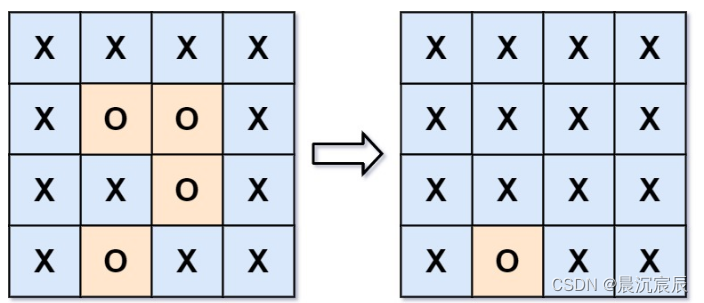
2. 思路:(1)本题要求将所有被字母 X 包围的字母 O都变为字母 X ,但很难判断哪些 O 是被包围的,哪些 O 不是被包围的。
(2)注意到题目解释中提到:任何边界上的 O 都不会被填充为 X。 我们可以想到,所有的不被包围的 O 都直接或间接与边界上的 O 相连。我们可以利用这个性质判断 O 是否在边界上,具体地说:
① 对于每一个边界上的 O,我们以它为起点,标记所有与它直接或间接相连的字母 O;
② 最后我们遍历这个矩阵,对于每一个字母:
a. 如果该字母被标记过,则该字母为没有被字母 X 包围的字母 O,我们将其还原为字母 O;
b. 如果该字母没有被标记过,则该字母为被字母 X 包围的字母 O,我们将其修改为字母 X。
3. 解题:
方法一:深度优先搜索
我们可以使用深度优先搜索实现标记操作。在下面的代码中,我们把标记过的字母 O 修改为字母 A。
class Solution {
public:
int n, m;
//利用深度遍历,判断上下左右有没有连接的0,并且将它标记为A
void dfs(vector<vector<char>>& board, int x, int y) {
if (x < 0 || x >= n || y < 0 || y >= m || board[x][y] != 'O') {
return;
}
board[x][y] = 'A';
dfs(board, x + 1, y);
dfs(board, x - 1, y);
dfs(board, x, y + 1);
dfs(board, x, y - 1);
}
void solve(vector<vector<char>>& board) {
n = board.size();
if (n == 0) {
return;
}
m = board[0].size();
for (int i = 0; i < n; i++) {
dfs(board, i, 0);//遍历第一列
dfs(board, i, m - 1);//遍历最后一列
}
for (int i = 1; i < m - 1; i++) {
dfs(board, 0, i);//遍历第一行
dfs(board, n - 1, i);//遍历最后一行
}
//以上步骤就是利用深度遍历,将与边界的0相连的0都变成A,此时,剩余的0都是被x包围的。
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
if (board[i][j] == 'A') {
board[i][j] = 'O';
} else if (board[i][j] == 'O') {
board[i][j] = 'X';
}
}//for2
}//for1 此时将所有未标记的0变为x
}
};
复杂度分析
(1)时间复杂度:O(n \times m)O(n×m),其中 nn 和 mm 分别为矩阵的行数和列数。深度优先搜索过程中,每一个点至多只会被标记一次。
(2)空间复杂度:O(n \times m)O(n×m),其中 nn 和 mm 分别为矩阵的行数和列数。主要为深度优先搜索的栈的开销。
方法一:广度优先搜索
class Solution {
public:
const int dx[4] = {1, -1, 0, 0};
const int dy[4] = {0, 0, 1, -1};
void solve(vector<vector<char>>& board) {
int n = board.size();
if (n == 0) {
return;
}
int m = board[0].size();
queue<pair<int, int>> que;
for (int i = 0; i < n; i++) {
if (board[i][0] == 'O') {
que.emplace(i, 0);
board[i][0] = 'A';
}
if (board[i][m - 1] == 'O') {
que.emplace(i, m - 1);
board[i][m - 1] = 'A';
}
}
for (int i = 1; i < m - 1; i++) {
if (board[0][i] == 'O') {
que.emplace(0, i);
board[0][i] = 'A';
}
if (board[n - 1][i] == 'O') {
que.emplace(n - 1, i);
board[n - 1][i] = 'A';
}
}
while (!que.empty()) {
int x = que.front().first, y = que.front().second;
que.pop();
for (int i = 0; i < 4; i++) {
int mx = x + dx[i], my = y + dy[i];
if (mx < 0 || my < 0 || mx >= n || my >= m || board[mx][my] != 'O') {
continue;
}
que.emplace(mx, my);
board[mx][my] = 'A';
}
}
for (int i = 0; i < n; i++) {
for (int j = 0; j < m; j++) {
if (board[i][j] == 'A') {
board[i][j] = 'O';
} else if (board[i][j] == 'O') {
board[i][j] = 'X';
}
}
}
}
};
复杂度分析
(1)时间复杂度:O(n \times m)O(n×m),其中 nn 和 mm 分别为矩阵的行数和列数。广度优先搜索过程中,每一个点至多只会被标记一次。
(2)空间复杂度:O(n \times m)O(n×m),其中 nn 和 mm 分别为矩阵的行数和列数。主要为广度优先搜索的队列的开销。
2) 题目二
最小基因变化
基因序列可以表示为一条由 8 个字符组成的字符串,其中每个字符都是 ‘A’、‘C’、‘G’ 和 ‘T’ 之一。
假设我们需要调查从基因序列 start 变为 end 所发生的基因变化。一次基因变化就意味着这个基因序列中的一个字符发生了变化。
例如,“AACCGGTT” --> “AACCGGTA” 就是一次基因变化。
另有一个基因库 bank 记录了所有有效的基因变化,只有基因库中的基因才是有效的基因序列。(变化后的基因必须位于基因库 bank 中)
给你两个基因序列 start 和 end ,以及一个基因库 bank ,请你找出并返回能够使 start 变化为 end 所需的最少变化次数。如果无法完成此基因变化,返回 -1 。
注意:起始基因序列 start 默认是有效的,但是它并不一定会出现在基因库中。
示例 1:
输入:start = “AACCGGTT”, end = “AACCGGTA”, bank = [“AACCGGTA”]
输出:1
示例 2:
输入:start = “AACCGGTT”, end = “AAACGGTA”, bank = [“AACCGGTA”,“AACCGCTA”,“AAACGGTA”]
输出:2
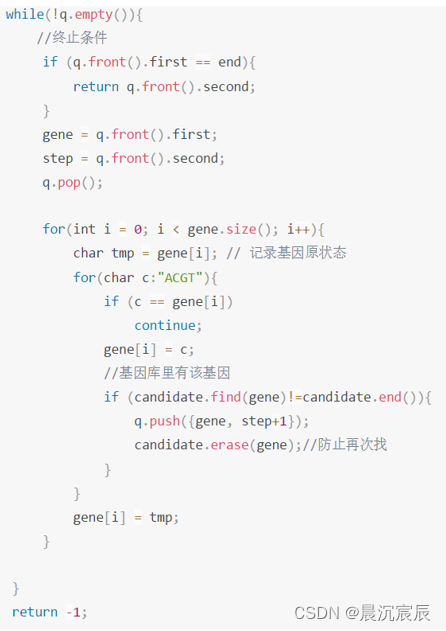
1. 思路与算法
(1)经过分析可知,题目要求将一个基因序列 AA 变化至另一个基因序列 BB,需要满足一下条件:
- 序列 AA 与 序列 BB 之间只有一个字符不同;
- 变化字符只能从{‘A’, ‘C’, ‘G’, ‘T’ }中进行选择;
- 变换后的序列 BB 一定要在字符串数组 bank 中。
(2)根据以上变换规则,我们可以进行尝试所有合法的基因变化,并找到最小的变换次数即可。步骤如下:
- 如果start 与 end 相等,此时直接返回 0;如果最终的基因序列不在bank 中,则此时按照题意要求,无法生成,直接返回 -1;
- 首先我们将可能变换的基因 s 从队列中取出,按照上述的变换规则,尝试所有可能的变化后的基因,比如一个 AACCGGTA,我们依次尝试改变基因 ss 的一个字符,并尝试所有可能的基因变化序列 s0,s1,s2 ,?,si,?,s?变化一次最多可能会生成 3×8=24 种不同的基因序列。
- 我们需要检测当前生成的基因序列的合法性 ,首先利用哈希表检测 si是否在数组bank 中,如果是则认为该基因合法,否则改变化非法直接丢弃;其次我们还需要用哈希表记录已经遍历过的基因序列,如果该基因序列已经遍历过,则此时直接跳过;如果合法且未遍历过的基因序列,则我们将其加入到队列中。
- 如果当前变换后的基因序列与end相等,则此时我们直接返回最小的变化次数即可;如果队列中所有的元素都已经遍历完成还无法变成end,则此时无法实现目标变化,返回 -1。
-
复杂度分析
(1)时间复杂度:O(c×n×m),其中 nn 为基因序列的长度,m 为数组 bank 的长度。对于队列中的每个合法的基因序列每次都需要计算c×n 种变化,在这里 C = 4;队列中最多有m 个元素,因此时间复杂度为 O(c×n×m)。
(2)空间复杂度:O(n×m),其中 n为基因序列的长度,m 为数组 bank 的长度。合法性的哈希表中一共存有 m 个元素,队列中最多有 m 个元素,每个元素的空间为 O(n);队列中最多有 m 个元素,每个元素的空间为 O(n),因此空间复杂度为 O(n×m)。
3. 拓扑排序
(1)基础算法
Status TopologicalSort(ALGraph G, int topo[]) {
//有向图 G 采用邻接表存储结构
//若 G 无回路,则生成 G 的一个拓扑排序 topo[]并返回 OK,否则 ERROR
FindInDegree(G, indegree);//求出各结点的入度存入数组 indegree 中
SqStack S;
InitStack(S);//初始化栈
for (int i = 0; i < G.vexnum; i++) {
if (!indegree[i]) Push(S, i);//入度为 0 者进栈
}
int m = 0;//对输出顶点计数 u,初始为 0
while (!StackEmpty(S)) {
int i = 0;
Pop(S, i);//将栈顶顶点 vi 出栈
topo[m] = i;//将 vi 保存在拓扑序列数组 topo 中
++m;//对输出顶点计数
ArcNode* p = new ArcNode;
p = G.vertices[i].firstarc;//p 指向 vi 的第一个邻接点
while (p != NULL) {
int k = p->adjvex;//vk 为 vi 的邻接点
--indegree[k];//vi 的每个邻接点的入度减一
if (indegree[k] == 0) Push(S, k);//若入度减为 0,则入栈
p = p->nextarc;//p 指向顶点 vi 下一个邻接结点
}
}
if (m < G.vexnum) return ERROR;//该有向图有回路
else return OK;
}
(2)力扣练习题
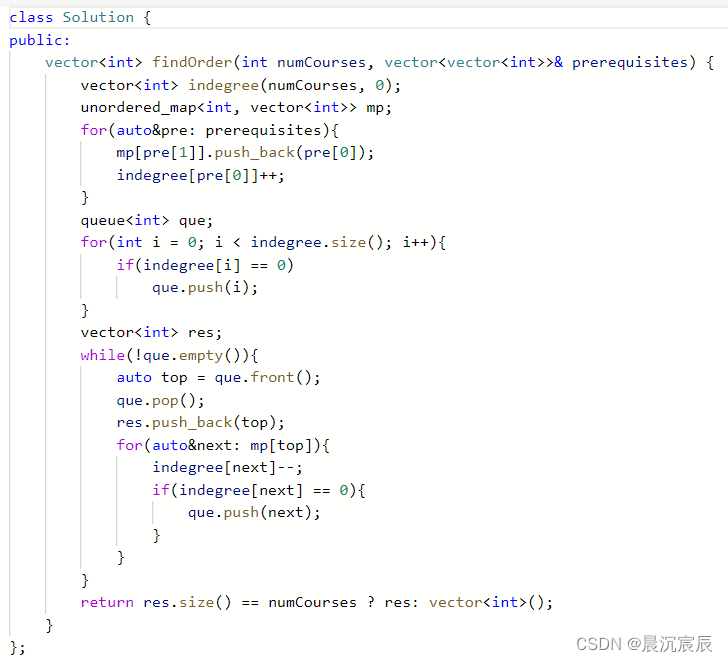
课程2
现在你总共有 numCourses 门课需要选,记为 0 到 numCourses - 1。给你一个数组 prerequisites ,其中 prerequisites[i] = [ai, bi] ,表示在选修课程 ai 前 必须先选修 bi 。
例如,想要学习课程 0 ,你需要先完成课程 1 ,我们用一个匹配来表示:[0,1] 。返回你为了学完所有课程所安排的学习顺序。可能会有多个正确的顺序,你只要返回 任意一种 就可以了。如果不可能完成所有课程,返回 一空数组 。
输入:numCourses = 4, prerequisites = [[1,0],[2,0],[3,1],[3,2]]
输出:[0,2,1,3] 解释:总共有 4 门课程。要学习课程 3,你应该先完成课程 1 和课程 2。并且课程 1 和课程 2
都应该排在课程 0 之后。 因此,一个正确的课程顺序是 [0,1,2,3] 。另一个正确的排序是 [0,2,1,3] 。
三、新增考点―Bellman-Ford 单源最短路径算法
- 算法描述:
(1)对于带权有向图 G = (V, E),Dijkstra 算法要求图 G 中边的权值均为非负,而 Bellman-Ford 算法能适应一般的情况(即存在负权边的情况)。一个实现的很好的 Dijkstra 算法比 Bellman-Ford 算法的运行时间要低。
(2)Bellman-Ford 算法采用动态规划(Dynamic Programming)进行设计,实现的时间复杂度为 O(V*E),其中 V 为顶点数量,E 为边的数量。Dijkstra 算法采用贪心算法(Greedy Algorithm)范式进行设计,普通实现的时间复杂度为 O(V2),若基于 Fibonacci heap 的最小优先队列实现版本则时间复杂度为 O(E + VlogV)。 - 算法思路
1)创建源顶点 v 到图中所有顶点的距离的集合 distSet,为图中的所有顶点指定一个距离值,初始均为 Infinite,源顶点距离为 0;
2) 计算最短路径,执行 V - 1 次遍历;
对于图中的每条边:如果起点 u 的距离 d 加上边的权值 w 小于终点 v 的距离 d,则更新终点 v 的距离值 d;
3)检测图中是否有负权边形成了环,遍历图中的所有边,计算 u 至 v 的距离,如果对于 v 存在更小的距离,则说明存在环; - Bellman-Ford 算法的运行时间为 O(V*E),因为第 2 行的初始化占用了 Θ(V),第 3-4 行对边进行了 V - 1 趟操作,每趟操作的运行时间为 Θ(E)。第 6-7 行的 for 循环运行时间为 O(E)。
- 核心代码:
for (var i = 0; i < n - 1; i++) {
for (var j = 0; j < m; j++) {//对m条边进行循环
var edge = edges[j];
// 松弛操作
if (distance[edge.to] > distance[edge.from] + edge.weight ){
distance[edge.to] = distance[edge.from] + edge.weight;
}
}
}
其中, n为顶点的个数,m为边的个数,edges数组储存了所有边,distance数组是源点到所有点的距离估计值,循环结束后就是最小值。
5. 例题
例如,下面的有向图 G 中包含 5 个顶点和 8 条边。假设源点 为 A。初始化 distSet 所有距离为 INFI,源点 A 为 0。