【学习目标】
碰撞检测
-
能够让两个游戏物体之间产生碰撞
-
能够让两个物体碰撞时表现出不同效果
-
能够通过代码检测到碰撞产生的不同阶段
-
能够使用触发器让两个物体相互穿透
-
能够通过代码检测到触发产生的不同阶段
【碰撞检测】
【碰撞的必要条件】
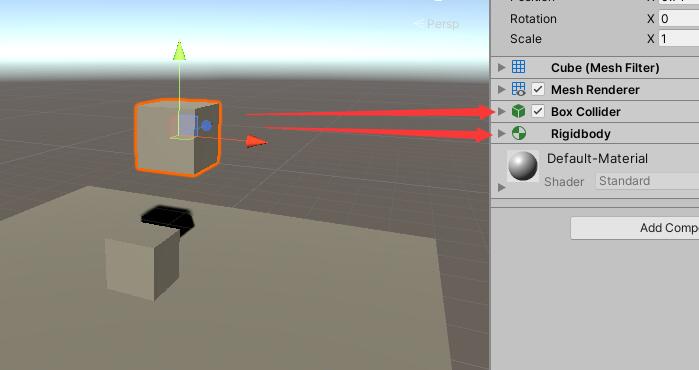
两个游戏物体(GameObject)之间
至少有一个物体有刚体组件(Rigidbody)
并且两个物体都有碰撞盒组件(Collider)
【实例】
?
?
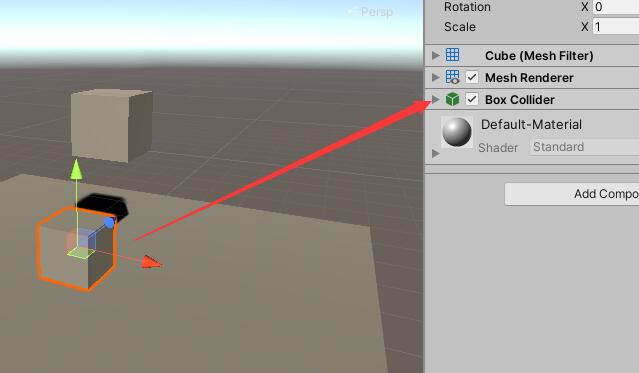
上方物体挂载了刚体和碰撞盒
下方物体挂载了碰撞盒
运行后由于上方物体有刚体组件
并且Use?Gravity默认勾选
所以它会受重力影响自由下落
?
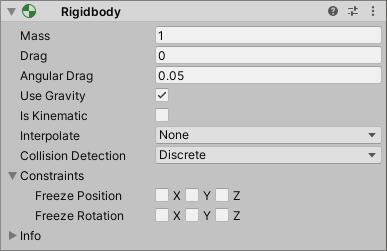
【刚体组件】
让游戏物体(GameObject)
受到力的作用
参数说明
红色字为重要参数
其余了解即可
Mass
对象的质量(默认为千克)
Drag
根据力移动对象时影响对象的空气阻力大小。0 表示没有空气阻力,无穷大使对象立即停止移动
Angular Drag
根据扭矩旋转对象时影响对象的空气阻力大小。0 表示没有空气阻力。请注意,如果直接将对象的 Angular Drag 属性设置为无穷大,无法使对象停止旋转。
Use Gravity
如果启用此属性,则对象将受重力影响。
Is Kinematic
如果启用此选项,则对象将不会被物理引擎驱动,只能通过?(Transform)?对其进行操作。对于移动平台,或者如果要动画化附加了?HingeJoint?的刚体,此属性将非常有用。
Interpolate
仅当在刚体运动中看到急动时才尝试使用提供的选项之一。
-None
不应用插值。
-Interpolate
根据前一帧的变换来平滑变换。
-Extrapolate
根据下一帧的估计变换来平滑变换。
Collision Detection
用于防止快速移动的对象穿过其他对象而不检测碰撞。
-Discrete
对场景中的所有其他碰撞体使用离散碰撞检测。其他碰撞体在测试碰撞时会使用离散碰撞检测。用于正常碰撞(这是默认值)。
-Continuous
对动态碰撞体(具有刚体)使用离散碰撞检测,并对静态碰撞体(没有刚体)使用基于扫掠的连续碰撞检测。设置为_连续动态 (Continuous Dynamic)?的刚体将在测试与该刚体的碰撞时使用连续碰撞检测。其他刚体将使用离散碰撞检测。用于连续动态 (Continuous Dynamic)?检测需要碰撞的对象。(此属性对物理性能有很大影响,如果没有快速对象的碰撞问题,请将其保留为?Discrete?设置)
-Continuous Dynamic
对设置为连续 (Continuous)和连续动态 (Continuous Dynamic)碰撞的游戏对象使用基于扫掠的连续碰撞检测。还将对静态碰撞体(没有刚体)使用连续碰撞检测。对于所有其他碰撞体,使用离散碰撞检测。用于快速移动的对象。
-Continuous Speculative
对刚体和碰撞体使用推测性连续碰撞检测。这也是可以设置运动物体的唯一 CCD 模式。该方法通常比基于扫掠的连续碰撞检测的成本更低。
Constraints
对刚体运动的限制。
-Freeze Position
有选择地停止刚体沿世界 X、Y 和 Z 轴的移动。
-Freeze Rotation
有选择地停止刚体围绕局部 X、Y 和 Z 轴旋转。
【碰撞盒组件们】
决定游戏物体(GameObject)
碰撞范围并产生
碰撞效果
常用碰撞盒
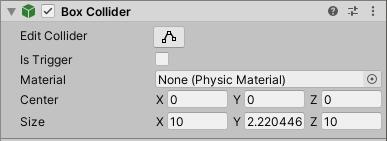
Box Collider(盒装碰撞盒)
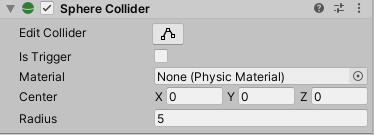
Sphere?Collider(球形碰撞盒)
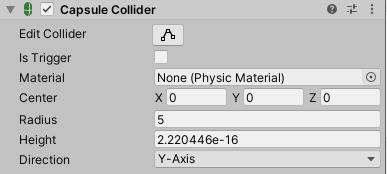
Capsule?Collider(胶囊碰撞盒)
不常用碰撞盒
性能消耗高
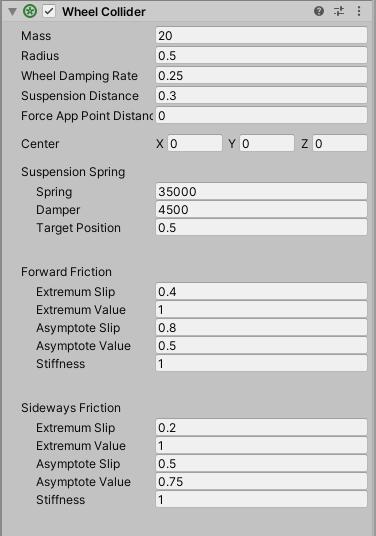
Wheel Collider(环状碰撞盒)
Mesh?Collider(网格碰撞盒)
Terrain?Collider(地形碰撞盒)
共有参数含义:
Is Trigger
是否是触发器,如果启用此属性,则该碰撞体将用于触发事件,并被物理引擎忽略
Material
物理材质,可以确定碰撞体和其它对象碰撞时的交互(表现)方式。
Center
碰撞体在对象局部空间中的中心点位置。
?
Size
碰撞体在X、Y、Z方向上的大小
?
Radius
球形碰撞体的半径大小
?
Radius
胶囊体的半径
Height
胶囊体的高度
Direction
胶囊体在对象局部空间中的轴向
?
Mass
车轮的质量
Radius
车轮的半径
Wheel Damping Rate
这是应用于车轮的阻尼值
Suspension Distance
车轮悬架的最大延伸距离(在局部空间中测量)。悬架始终向下延伸穿过局部 Y 轴。
Force App Point Distance
此参数定义车轮上的受力点。此距离应该是距车轮底部静止位置的距离(沿悬架行程方向),以米为单位。当?forceAppPointDistance = 0?时,受力点位于静止的车轮底部。较好的车辆会使受力点略低于车辆质心。
Suspension Spring
悬架尝试通过增加弹簧力和阻尼力来到达目标位置 (Target Position)
-Spring
弹簧力尝试到达目标位置。值越大,悬架达到目标位置就越快
-Damper
抑制悬架速度。值越大,悬架弹簧移动就越慢
-Target Position
悬架沿悬架距离 (Suspension Distance) 的静止距离。1 对应于完全展开的悬架,0 对应于完全压缩的悬架。默认值为 0.5,与常规汽车的悬架行为匹配。
Forward Friction
车轮向前滚动时轮胎摩擦的特性。
Sideways Friction
车轮侧向滚动时轮胎摩擦的特性。
-Extremum Slip
曲线的极值点。
-Extremum Value
曲线的极值点。
-Asymptote Slip
曲线的渐近点。
-Asymptote Value
曲线的渐近点。
-Stiffness
Extremum Value?和?Asymptote Value?的乘数(默认值为 1)。改变摩擦力的刚度。将此值设置为零将完全禁用车轮的所有摩擦力。通常在运行时修改刚度以使用脚本来模拟各种地面材质。
注意
不必通过转动或滚动 WheelCollider 对象来控制汽车;附加了 WheelCollider 的对象应始终相对于汽车本身固定
?
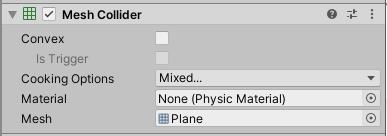
Convex
勾选此复选框可启用?Convex。如果启用此属性,该 Mesh Collider 将与其他 Mesh Collider 发生碰撞。Convex?Mesh Collider 最多 255 个三角形。
Cooking Options
启用或禁用影响物理引擎对网格处理方式的网格烹制选项。
-None
禁用下方列出的所有?Cooking Options。
-Everything
启用下方列出的所有?Cooking Options。
-Cook for Faster Simulation
使物理引擎烹制网格以加快模拟速度。启用此设置后,这会运行一些额外步骤,以保证生成的网格对于运行时性能是最佳的。这会影响物理查询和接触生成的性能。禁用此设置后,物理引擎会使用更快的烹制速度,并尽可能快速生成结果。因此,烹制的 Mesh Collider 可能不是最佳的。
-Enable Mesh?Cleaning
使物理引擎清理网格。启用此设置后,烹制过程会尝试消除网格的退化三角形以及其他几何瑕疵。此过程生成的网格更适合于在碰撞检测中使用,往往可生成更准确的击中点。
-Weld Colocated Vertices
使物理引擎在网格中删除相等的顶点。启用此设置后,物理引擎将合并具有相同位置的顶点。这对于运行时发生的碰撞反馈十分重要。
Mesh
引用需要用于碰撞的网格。
网格烹制
网格烹制将常规网格更改为可以在物理引擎中使用的网格。烹制会构建用于物理查询的空间搜索结构(如?Physics.Raycast)以及用于接触生成的支持结构。Unity 在碰撞检测中使用网格之前烹制所有这些网格。这可在导入时 (Import Settings > Model > Generate Colliders) 或运行时进行。
?
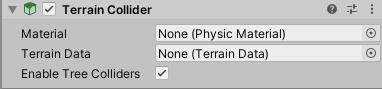
Terrain Data
地形数据
Enable Tree Colliders
选中此属性时,将启用树碰撞体
━━━━━━━━━━━━━━━━━━━━
完成目标一
能够让两个游戏物体之间产生碰撞
━━━━━━━━━━━━━━━━━━━━
【物理材质】
当物体之间发生碰撞时
物理材质决定碰撞体与其它对象的
交互方式(碰撞表现)
物理材质是和碰撞盒
结合使用的
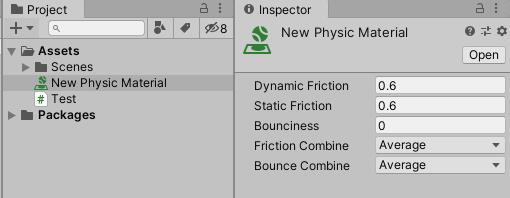
【创建】
?
Project窗口
↓
右键
↓
Create
↓
Physic Material
?
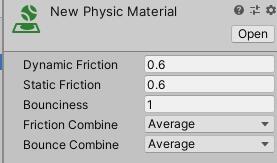
?
Dynamic Friction
已在移动时使用的摩擦力。通常为 0 到 1 之间的值。值为零就像冰一样,值为 1 将使对象迅速静止(除非用很大的力或重力推动对象)
Static Friction
当对象静止在表面上时使用的摩擦力。通常为 0 到 1 之间的值。值为零就像冰一样,值为 1 将导致很难让对象移动。
Bounciness
表面的弹性如何?值为 0 将不会反弹。值为 1 将在反弹时不产生任何能量损失,预计会有一些近似值,但可能只会给模拟增加少量能量。
Friction Combine
两个碰撞对象的摩擦力的组合方式。
-Average
对两个摩擦值求平均值。
-Minimum
使用两个值中的最小值。
-Maximum
使用两个值中的最大值。
-Multiply
两个摩擦值相乘。
Bounce Combine
两个碰撞对象的弹性的组合方式。其模式与 Friction Combine 模式相同
【实例】
?
把反弹力改为1
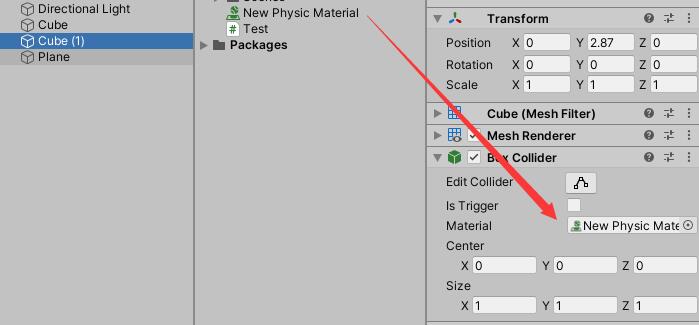
?
把这个物理材质
拖给两个立方体
运行后效果如下
?
通过设置物理材质
的各个参数
可以达到不同的
碰撞表现效果
━━━━━━━━━━━━━━━━━━━━
完成目标二
能够让两个物体碰撞时表现出不同效果
━━━━━━━━━━━━━━━━━━━━
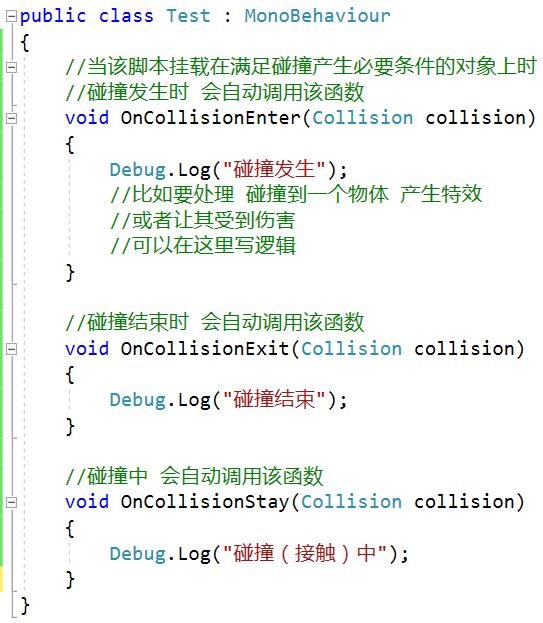
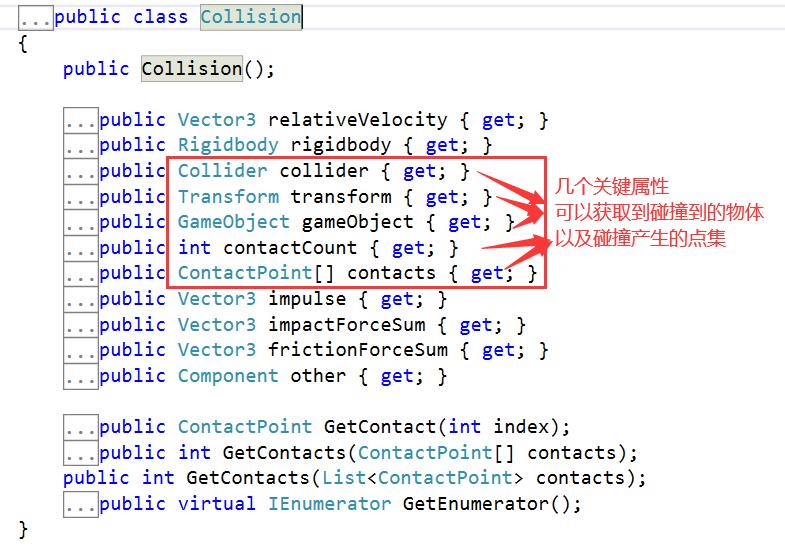
【碰撞检测函数】
?
关键参数
Collision
?
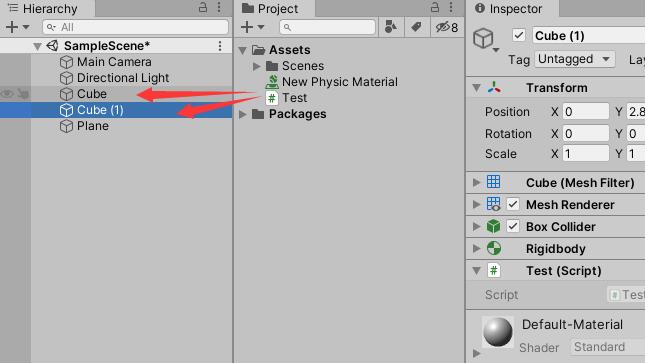
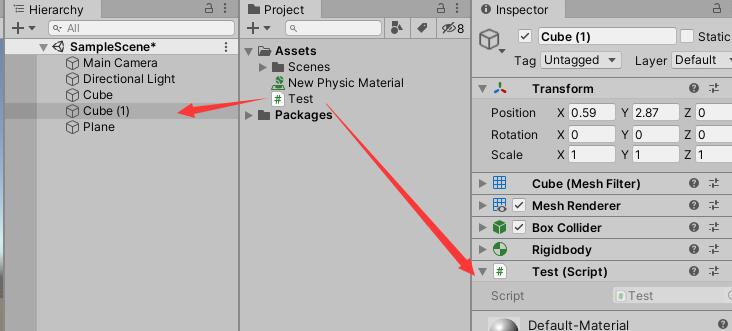
将这个Test脚本
挂载到两个物体中的其中一个即可
?
运行时
当产生碰撞时
会自动调用对应函数
进行逻辑处理

?
━━━━━━━━━━━━━━━━━━━━
完成目标三
能够通过代码检测到碰撞产生的不同阶段
━━━━━━━━━━━━━━━━━━━━
【触发器】
?
可以让挂载刚体的物体
穿透碰撞盒(一箭穿心)
主要作用
不产生物理效果
只进行碰撞检测
通过响应函数处理对应逻辑
?
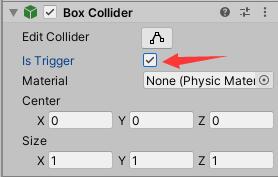
制作触发器非常简单,只需要在满足碰撞产生的必要条件的物体上,将带有刚体的物体上的碰撞盒的Is?Trigger属性勾选上
?
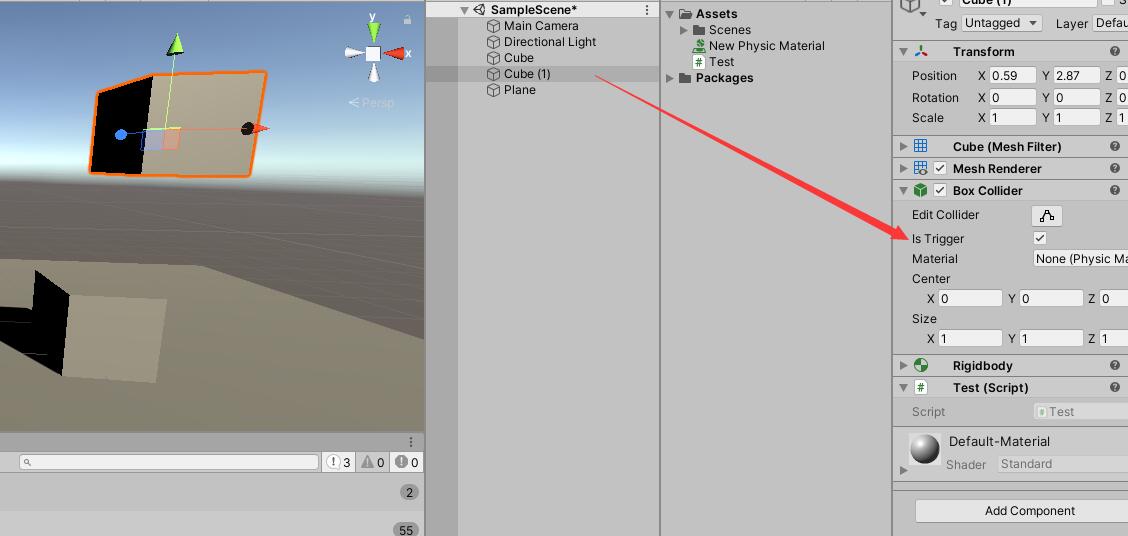
运行效果
刚体对象可以穿透对方
没有物理碰撞效果
?
━━━━━━━━━━━━━━━━━━━━
完成目标四
能够使用触发器让两个物体相互穿透
━━━━━━━━━━━━━━━━━━━━
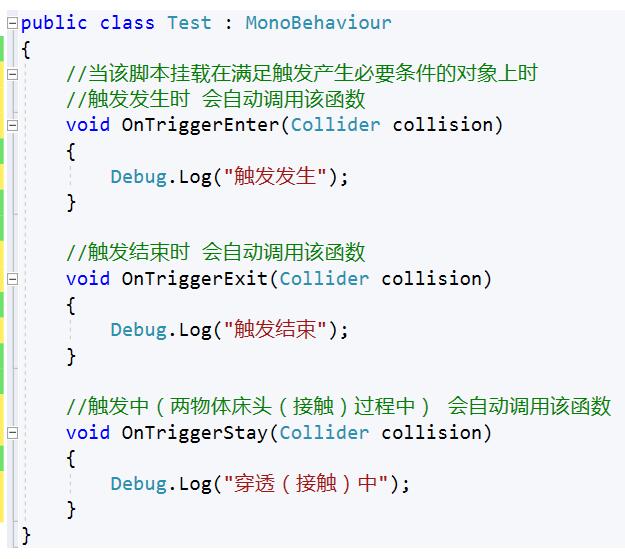
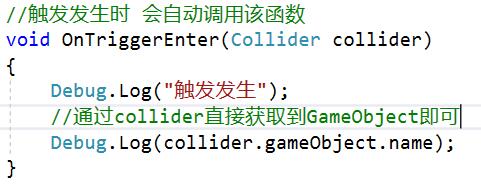
【触发检测函数】
?
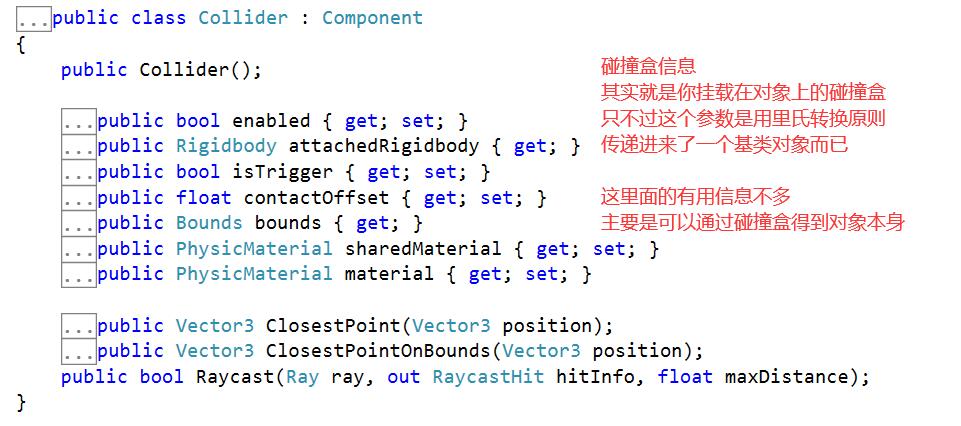
关键参数
Collider
?
?
将这个Test脚本
挂载到有刚体的物体上即可
运行时
当产生触发时
会自动调用对应函数
进行逻辑处理
?
━━━━━━━━━━━━━━━━━━━━
完成目标五
能够通过代码检测到触发产生的不同阶段
━━━━━━━━━━━━━━━━━━━━
【总结】
?
完成了五个学习目标后
就能基本掌握物理系统的核心
其中最重要的内容是
碰撞产生的必要条件
刚体和碰撞盒组件上的核心参数
碰撞和触发检测的6个函数
关注唐老狮获取更多干货内容

?

