前言
2022.2.22星期二,我已经将该项目转变为Unity引擎开发。当前进度十分滞后,恐怕有完不成的情况。最大的问题是,无法实现交通系统。唯一的值得欣慰的是,我找到一个Unity的付费城市交通场景项目Low Poly Epic City。花了钱买下来。网格A*算法寻路,有交通系统,我需要好好研究一下该项目。
目前项目,已实现车辆控制器,能自动(向前)行驶至给定目标点。
今天实现的内容:
寻路算法
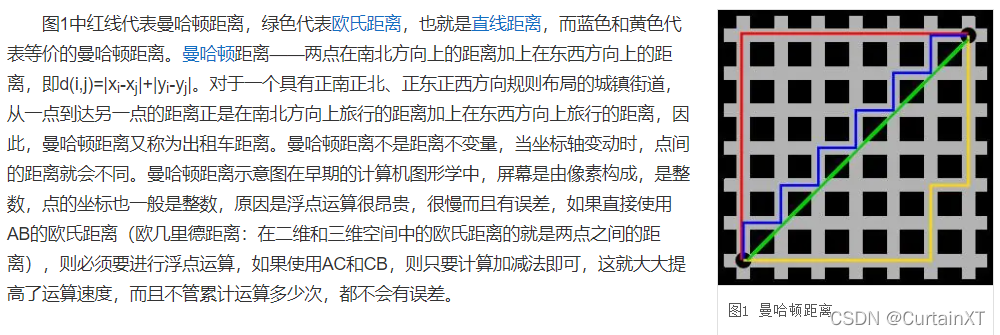
使用了A算法,H-cost采用曼哈顿距离。不过既然是A我觉得没啥好说的了。
Path
这个项目的寻路节点类取名叫Path。一个Tile(待会提到)下有若干Path,能够支持车辆的执行,变道,十字路口下的各种转向,不支持调头。主动避障也需要我自己想想办法实现。
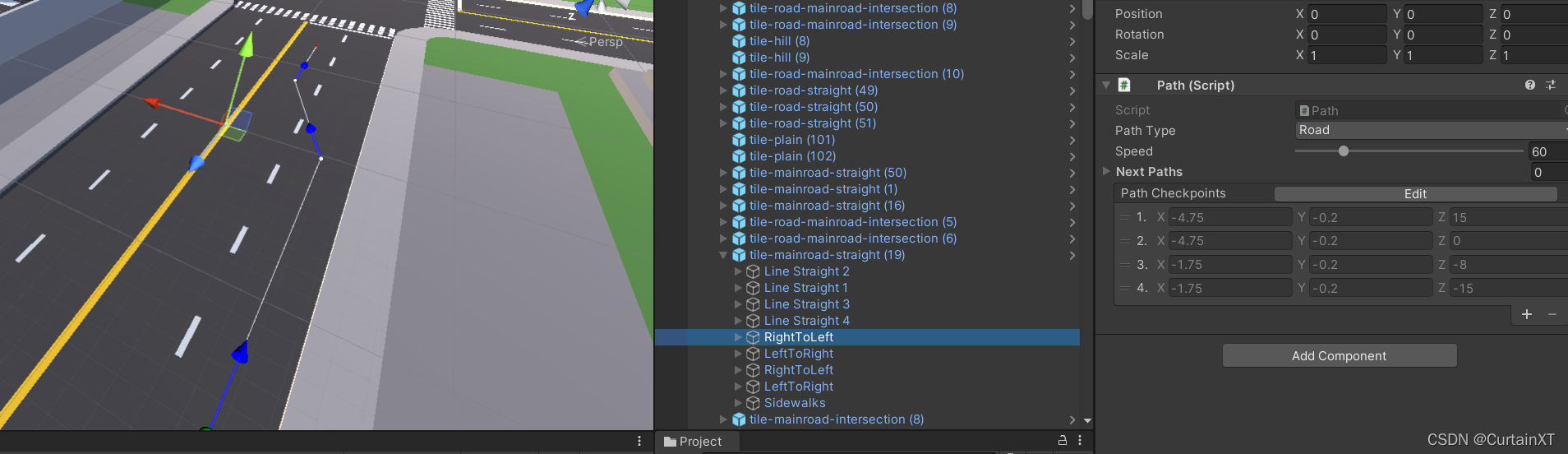
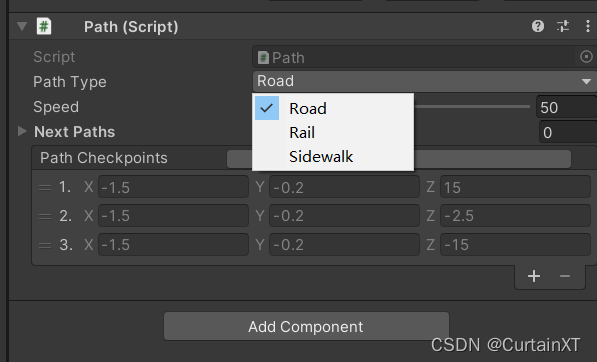
Path有分类,不过我就关注Road这个Type就行。Path中也可以对最大速度进行调整。
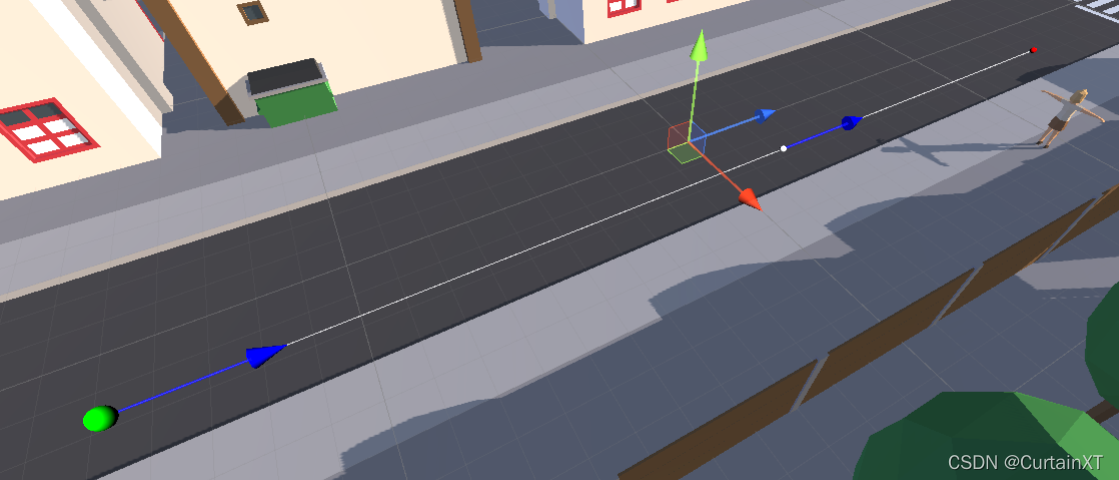
Next Paths就是Path衔接的下一个Path,由Tile系统根据相邻Tile自动设置。最后就是Path Checkpoints,它是Path中的一个精确的点的位置,可以编辑,添加和删除。这也算一种分而治之吧:Tile下面是Path,Path里面是Path Checkpoints。
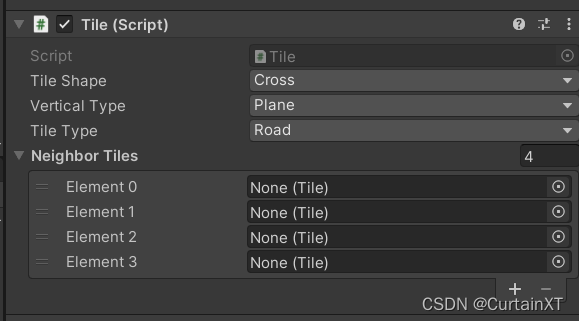
Tiles
每一个场景中可以开车的地块都会附加这个Tile脚本。Tile脚本会在Awake函数中获取相邻的Tiles(用碰撞检测的方式,所以对相邻的间隔会有个要求),然后会搜索所有子对象中的Path脚本,并在Start函数中连接这些Path。
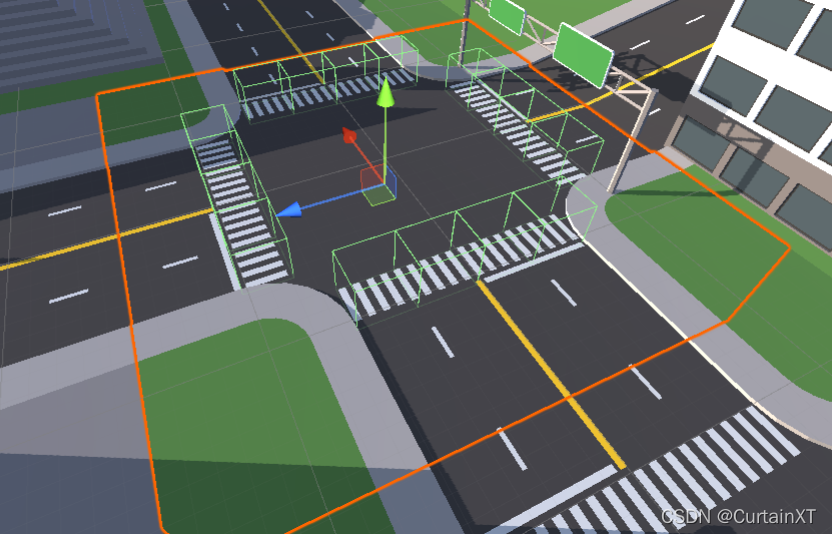
除此之外,Tile还定义了Shape,Vertical Type,Tile Type。主要用于Path连接方式判断、桥梁,斜坡等具有高低差的地形做目标点调节、不同运动对象的可通过性。
交通灯

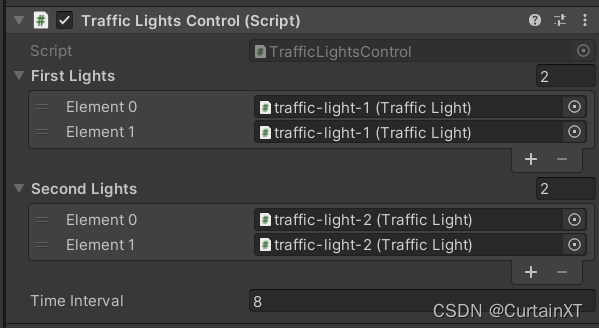
交通灯的控制
状态机,过Time Interval的时间间隔切换一次交通灯的状态。First Lights和Second Lights相当于分组。两组会同时切换状态,和现实的交通灯一样。
交通灯脚本
交通灯脚本通过一个Box collider作为trigger,当交通灯状态为红色时,阻止车辆前进,需要将tag设置为"TrafficLight"。我的毕设将不处理行人,因为不做行人。
公路载具
今天的重点来了,路上公路载具在Low Poly Epic City原本是设置为零重力,kinematic,由pathfinding和CarBehavior脚本控制运动。通过载具前方放置的Box collider来检测其它车辆、交通灯。Tag为"Car"。我需要将其调整为我的VehicleController进行运动控制。
载具有两种路径,随机目的地和闭环路径。闭环路径通过设置好的Checkpoints,以及通过pathfinder补充形成。载具也可以设置最大速度。
接下来的计划:
接下来要Check code了,还有不少的东西没有研究到,比如car spawner,event system。