步骤
? ? ? ? 1、安装SDK
? ? ? ? 2、返回主页成为开发者,注册好账号进首页后右上角就是appID??![]()
? ? ? ? 3、将下载好的SDK.unitypackage导入Asstes文件夹中
VR常用方法(Pico_API)
? ? ? ? 前提
| 注意:在写代码之前要先声明pico库的命名空间:【using Pvr_UnitySDKAPI;】 | |
| 注意:如果要使用手柄的话需要添加【Pvr_ControllerManager】组件 |
????????手柄
介绍 | 方法 |
| 获取Controller连接状态 | Pvr_UnitySDKAPI.Controller.UPvr_GetControllerState() |
| 判断按钮是否按住 | Pvr_UnitySDKAPI.Controller.UPvr_GetKey() |
| 判断按键是否按下 | Pvr_UnitySDKAPI.Controller.UPvr_GetKeyDown() |
| 判断按键是否抬起 | Pvr_UnitySDKAPI.Controller.UPvr_GetKeyUp() |
| 判断按键是否被长按 | Pvr_UnitySDKAPI.Controller.UPvr_GetKeyLongPressed() |
| 判断按键是否按下抬起了一次 | Pvr_UnitySDKAPI.Controller.UPvr_GetKeyClick() |
? ? ? ? 方向键(摇杆)
介绍 | 方法 |
| 判断Joystick键是否向上 | Pvr_UnitySDKAPI.Controller.UPvr_GetJoystickUp() |
| 判断Joystick键是否向下 | Pvr_UnitySDKAPI.Controller.UPvr_GetJoystickDown() |
| 判断Joystick键是否向左 | Pvr_UnitySDKAPI.Controller.UPvr_GetJoystickLeft() |
| 判断Joystick键是否向右 | Pvr_UnitySDKAPI.Controller.UPvr_GetJoystickRight() |
? ? ? ? 头盔
| 初始化距离传感器 | Pvr_UnitySDKAPI. Sensor. UPvr_InitPsensor() |
| 获得头戴距离传感器的状态 | Pvr_UnitySDKAPI. Sensor. UPvr_GetPsensorState() |
? ? ? ? 交互
| Neo2手柄的振动接口 | Pvr_UnitySDKAPI.Controller.UPvr_VibrateNeo2Controller() |
| 获取手柄连接状态 | Pvr_UnitySDKAPI.Controller. UPvr_GetControllerBindingState() |
| 初始化电量音量亮度服务 | Pvr_UnitySDKAPI.VolumePowerBrightness.UPvr_InitBatteryVolClass() |
| 开启音量服务 | Pvr_UnitySDKAPI.VolumePowerBrightness.UPvr_StartAudioReceiver() |
| 关闭音量服务 | Pvr_UnitySDKAPI.VolumePowerBrightness.UPvr_StopAudioReceiver() |
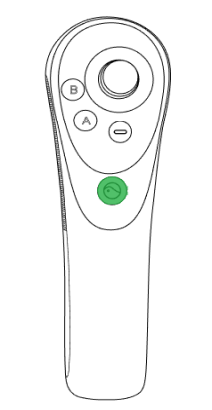
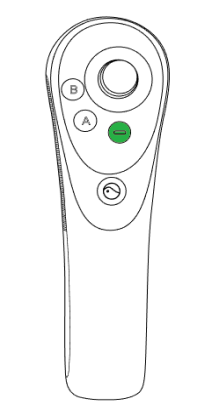
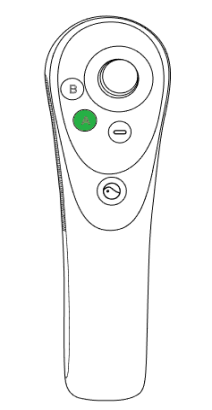
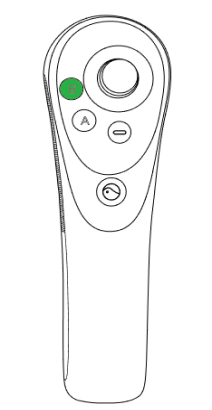
Pico Neo 2:
| 按键 | 输入事件 | ||
|---|---|---|---|
|
| Pvr_KeyCode.HOME | ||
|
| Pvr_KeyCode.APP | ||
|
| Pvr_KeyCode.TRIGGER | ||
|
|
| ||
|
| Pvr_KeyCode.X(手柄0) | ||
|
| Pvr_KeyCode.Y(手柄0) | ||
|
| Pvr_KeyCode.A(手柄1) | ||
|
| Pvr_KeyCode.B(手柄1) | ||
|
| Pvr_KeyCode.TOUCHPAD |