�������:https://blog.csdn.net/weixin_37661634/article/details/118902745��
IMU+��Ŀ����궨�IJ���
kalibr�ٷ��̳�:https://github.com/ethz-asl/kalibr/wiki/camera-imu-calibration
һ. ��ӡ�ٷ�ʹ�õı궨��:
�ٷ�����: https://github.com/ethz-asl/kalibr/wiki/downloads
���ɱ궨�������:
kalibr_create_target_pdf --type apriltag --nx 6 --ny 6 --tsize 0.08 --tspace 0.3
�����Ƽ����� Aprilgrid �궨�塣
https://github.com/ethz-asl/kalibr/wiki/calibration-targets
���ڱ궨���˵���ο���������:https://blog.csdn.net/Hanghang_/article/details/10354603
����������������˵��,�궨����Ӵ�С֮��ġ�
�����ص���Aprilgrid 6x6 0.5x0.5 m (unscaled)
ʹ��adobe acrobat pro dc �����Զ�������40%��ӡ,A4ֽ�պ��ܴ�ӡ���� ��
ԭ��IJ�����:
6X6 tags 6��6������
һ�������size=5.5cm
һ��С����spacing=1.65cm
40%������:
6X6 tags
һ�������size=2.2cm
һ��С����spacing=0.66cm
�ǵô�ӡ�����ó�����һ��,������ֲ����
���ع����ṩ��yaml��ʽ�ļ�,�IJ���,Ҳ����ֱ����������ġ�
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.022 #size of apriltag, edge to edge [m],����ӱ߳�0.022=2.2cm
tagSpacing: 0.3 #ratio of space between tags to tagSize,С���ӱ߳�/����ӱ߳�
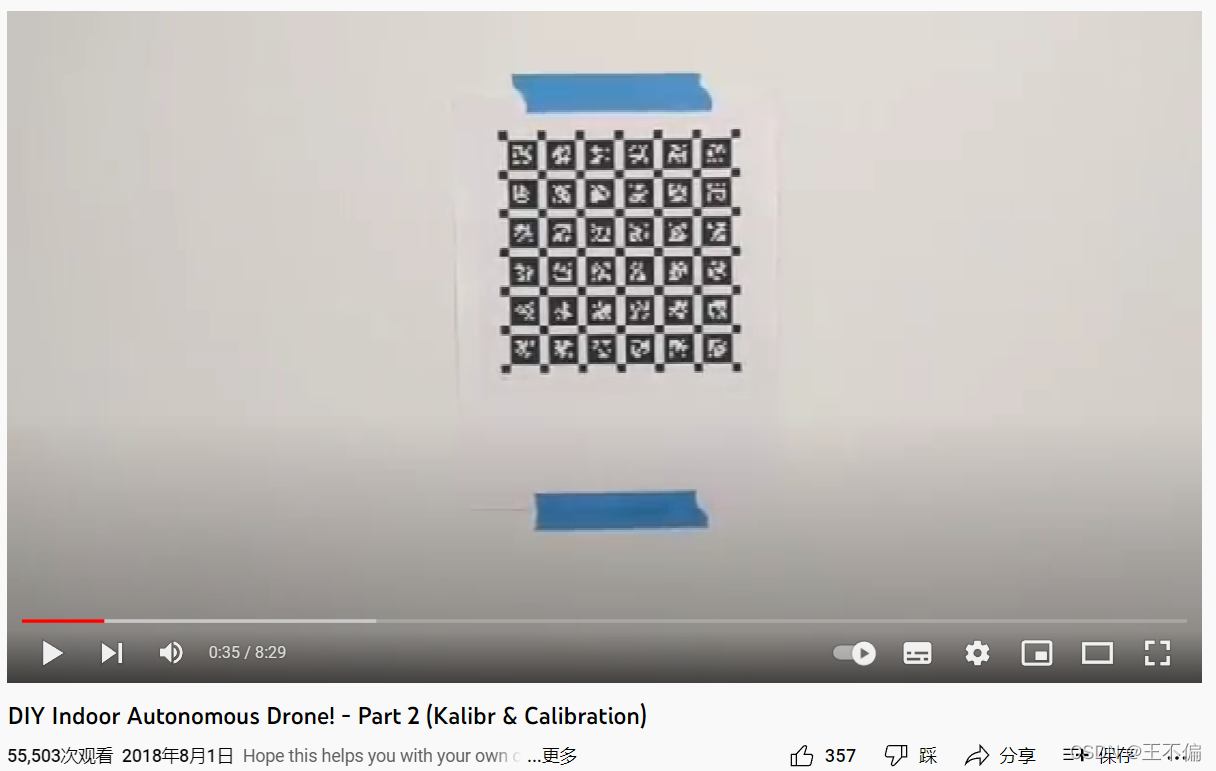
Ȼ��Ѵ�ӡ�ı궨ֽ����ǽ��
�ٷ�˵��: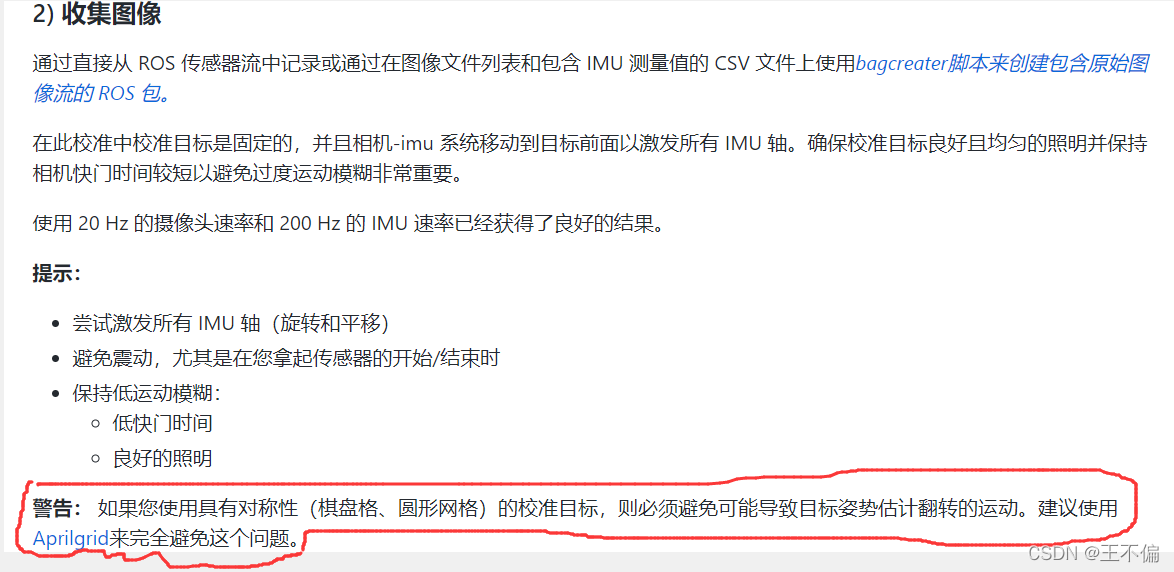
�궨��Ҫ�����ļ�,һ��������ı궨�ļ�,һ����IMU�ı궨�ļ�,һ����¼�Ƶ����ݰ�
��.¼�����ݰ�
- �������IMU:roslaunch realsense2_camera rs_camera.launch
���ҵ���֡��,���20Hz, IMU200Hz,���ֱ���/color��/imuΪ����������
kalibr�Ƽ�ʹ�� 4Hz ͼ��֡��,����ʹ��topic_tools/throttle���ͽ���Ƶ��
rosrun topic_tools throttle messages /camera/color/image_raw 20.0 /color
rosrun topic_tools throttle messages /camera/imu 200.0 /imu
- �Ȱ�Ŀ¼�ƶ����ոս�����kalibr��������Ŀ¼�¡�
Ȼ��ִ�� source devel/setup.sh
rosbag record -b 4096 -O dynamic /color /imu
��rosbag¼������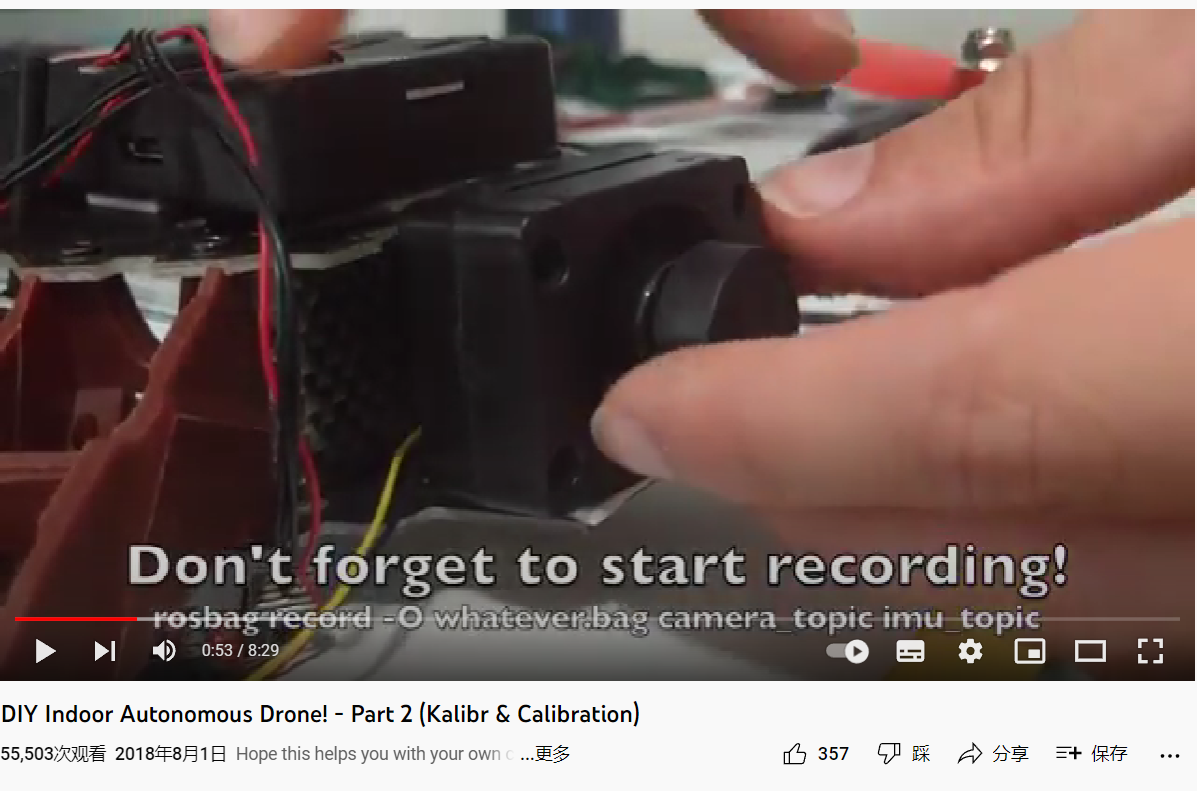
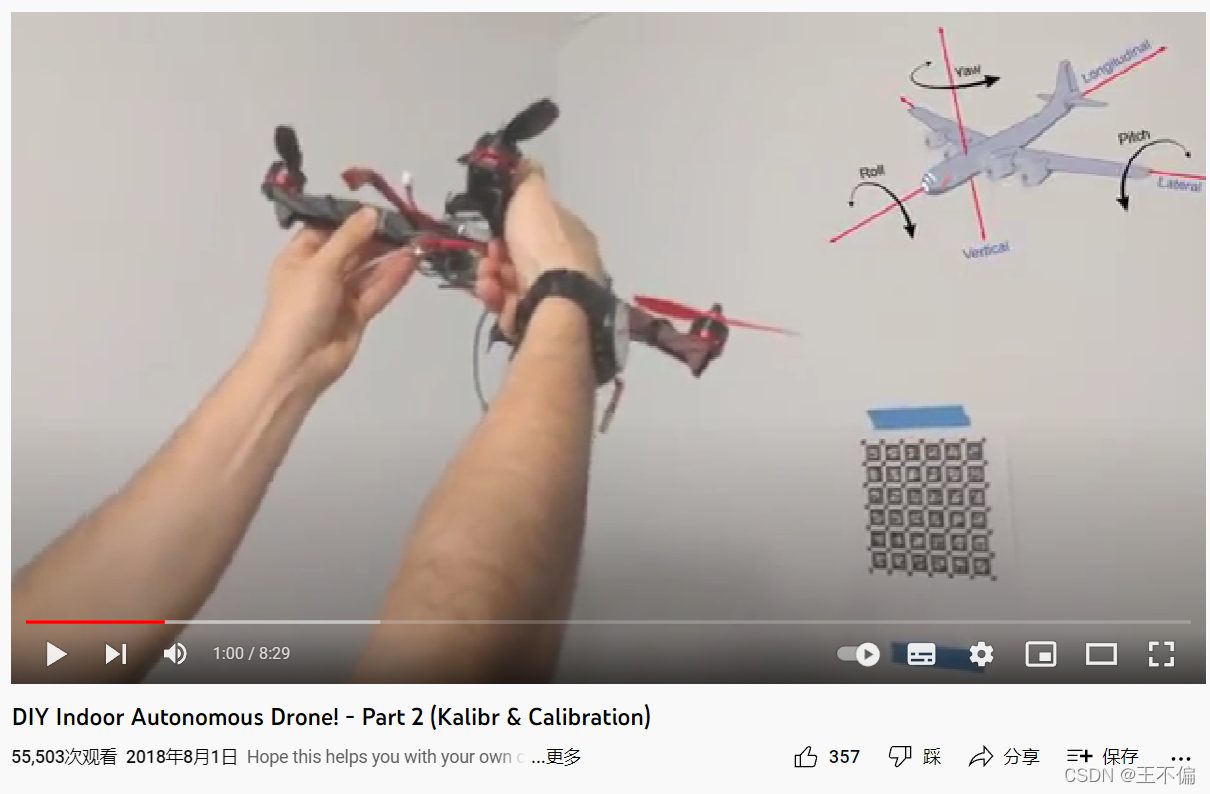
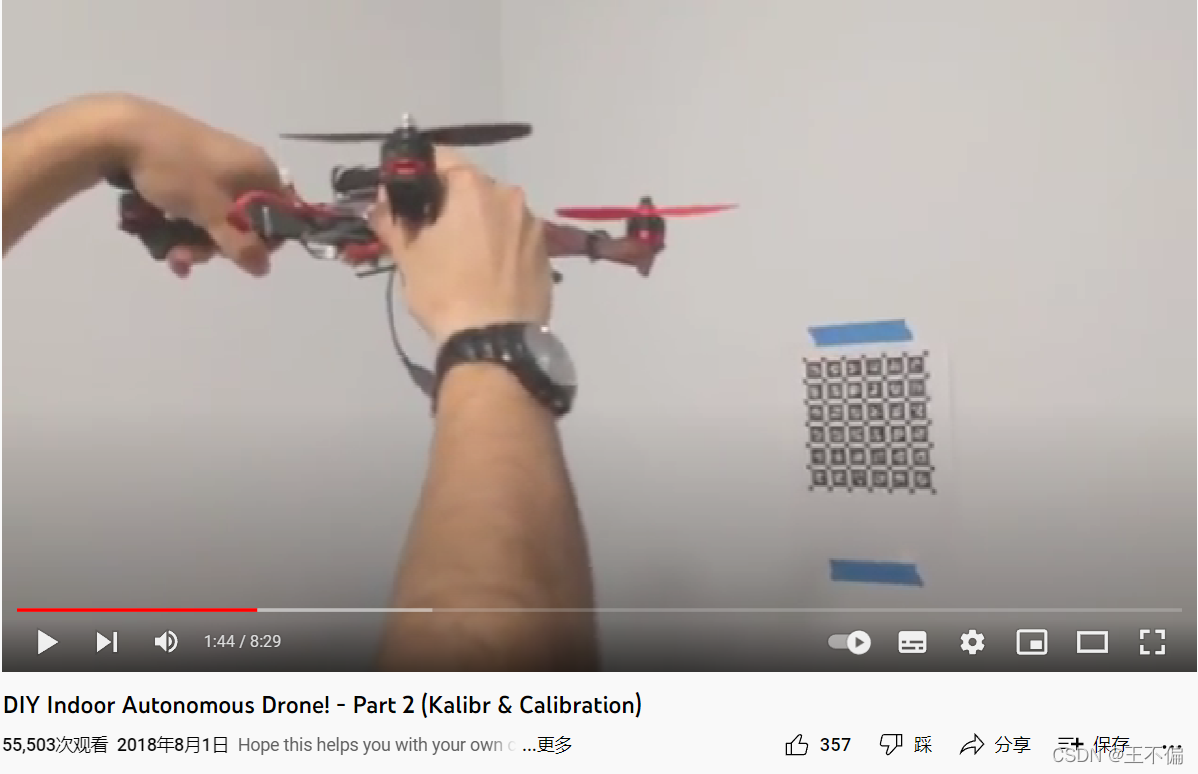
3. ��������,��������,��ת����,����ƽ������,����ƽ������,ǰ������,����ƶ����(����)
ע��:����Ĺ�����Ҫȷ���궨���������Ұ����ת�Ჿ��:
pitch��
������б:
������б: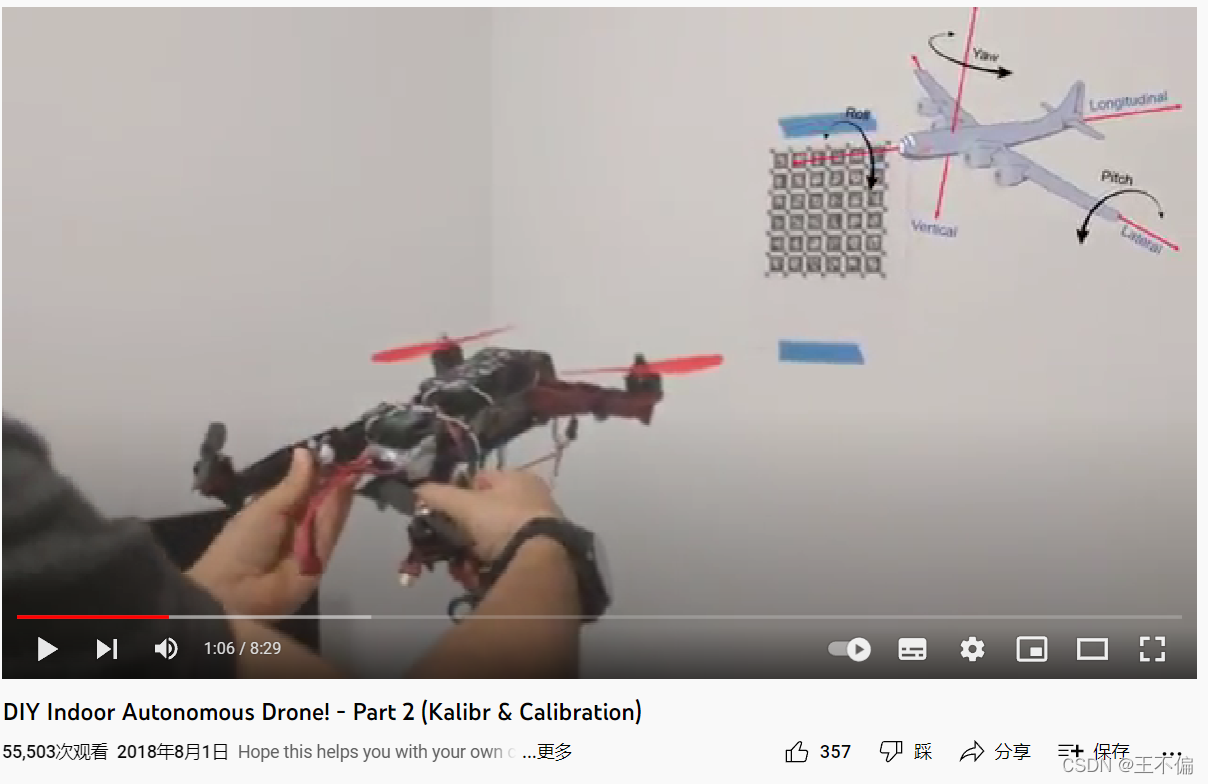
Yaw��
������б: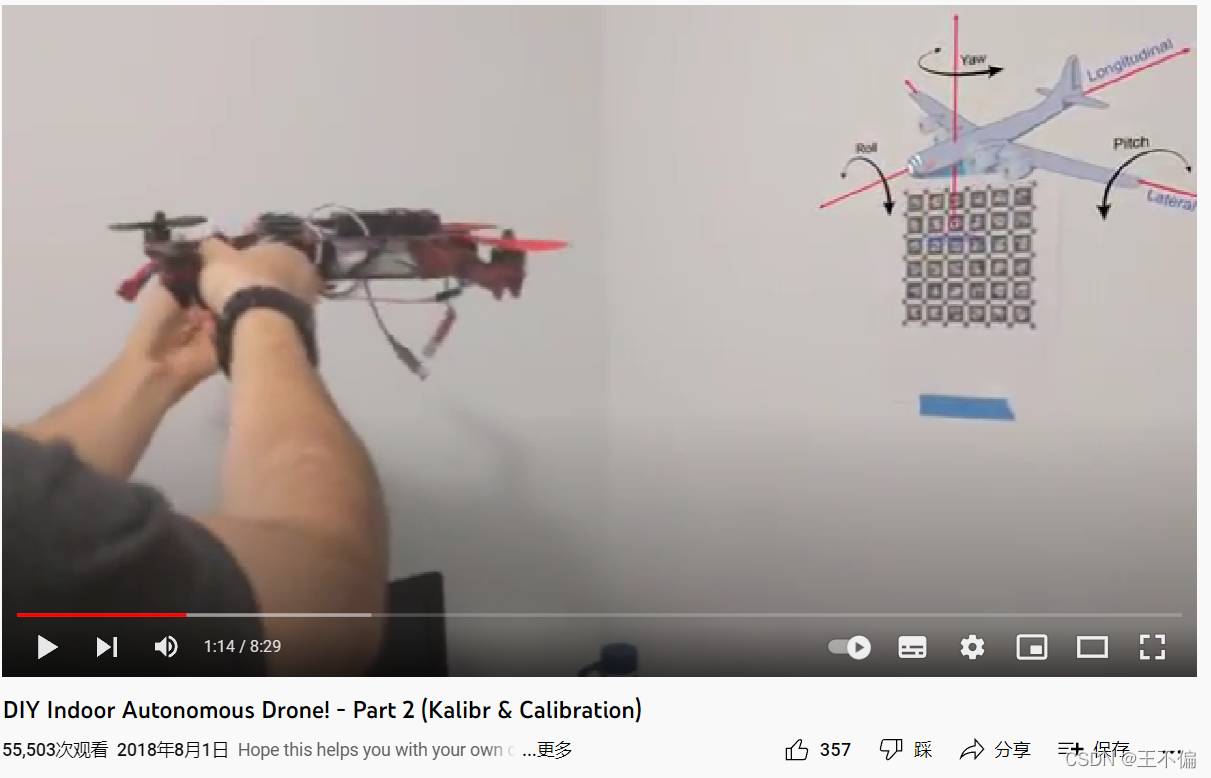
������б: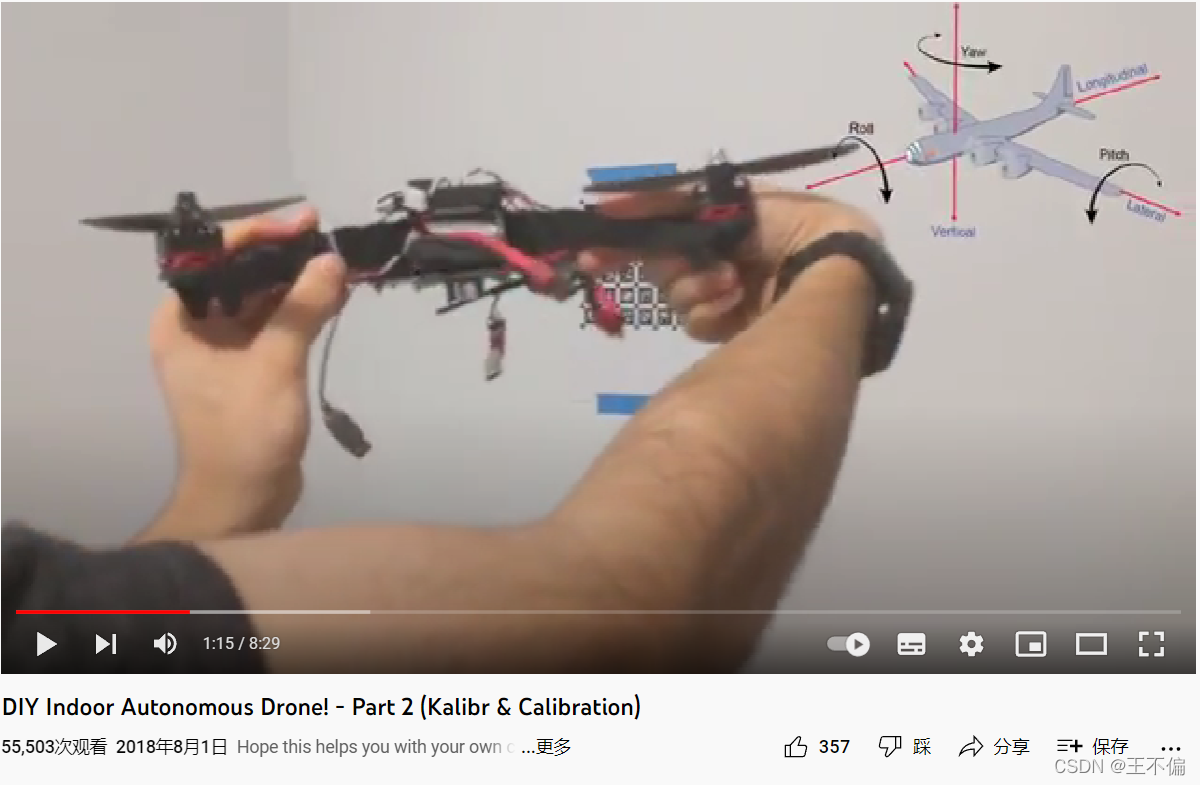
Roll��
���Ҳ෭: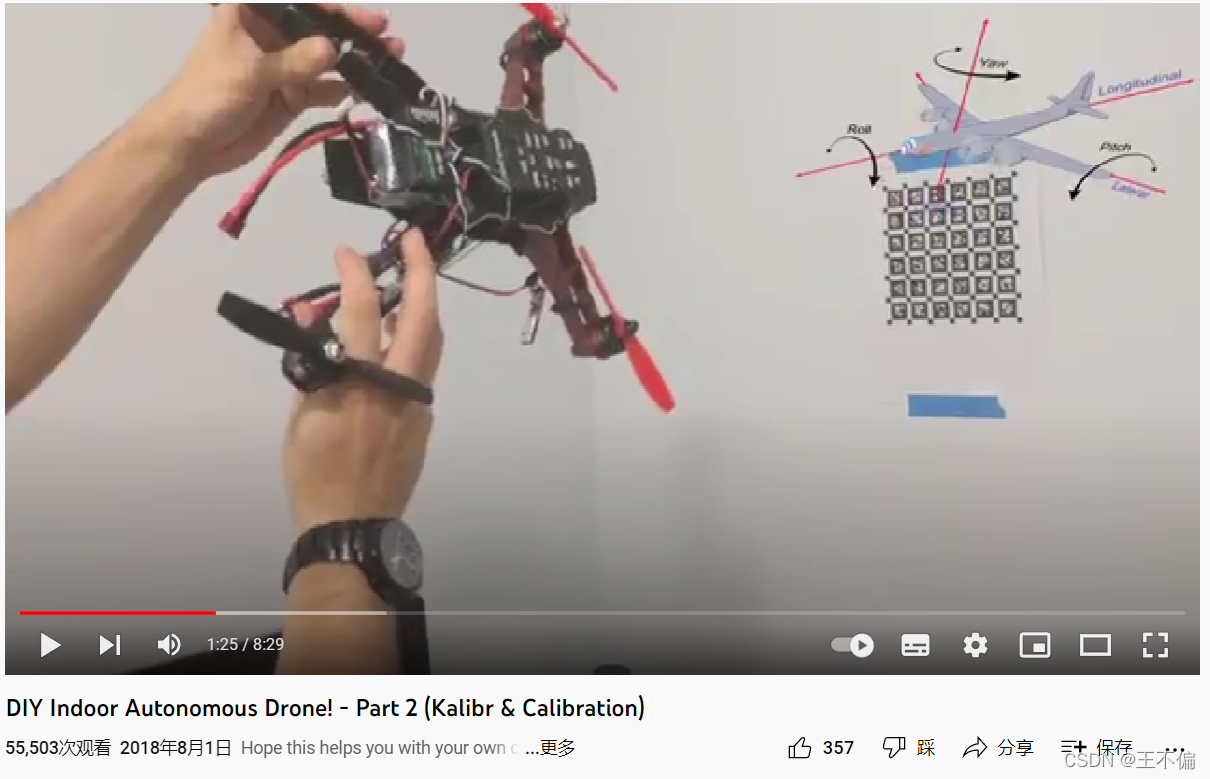
����෭: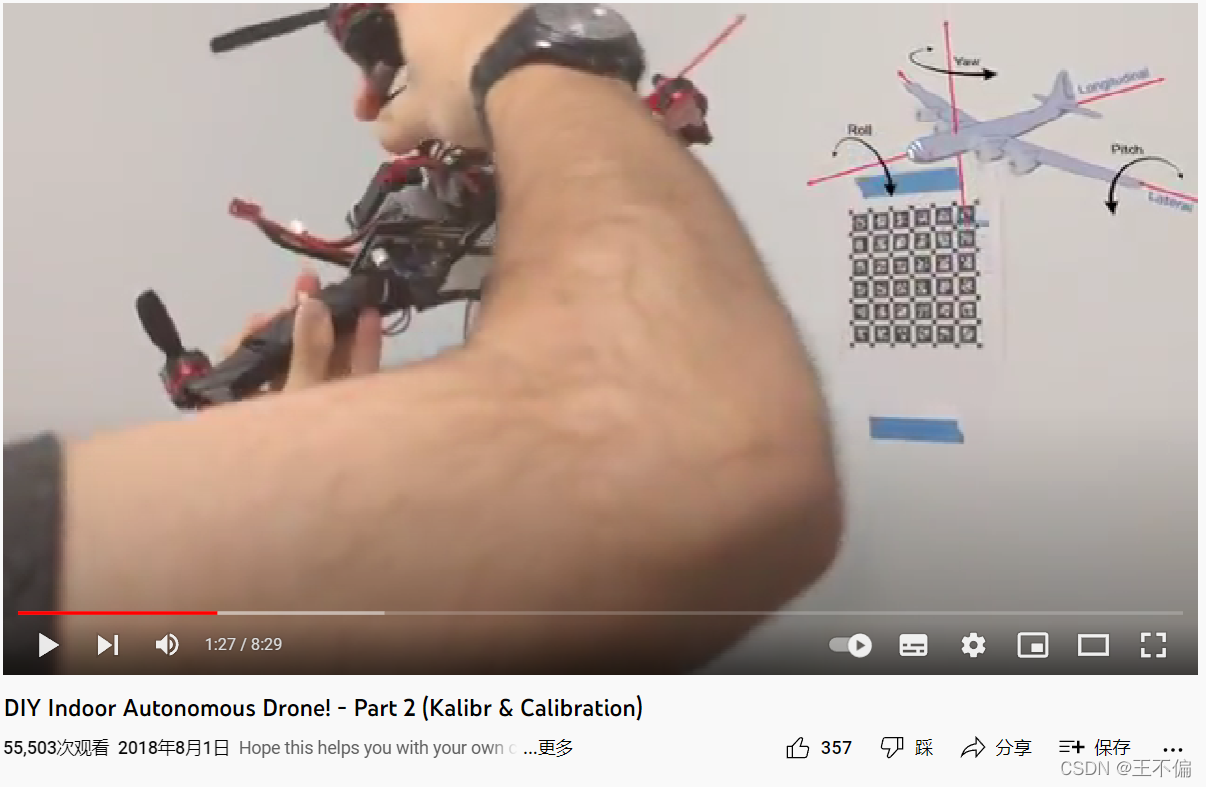
ƽ�Ʋ���:
����ƽ��:
����ƽ��: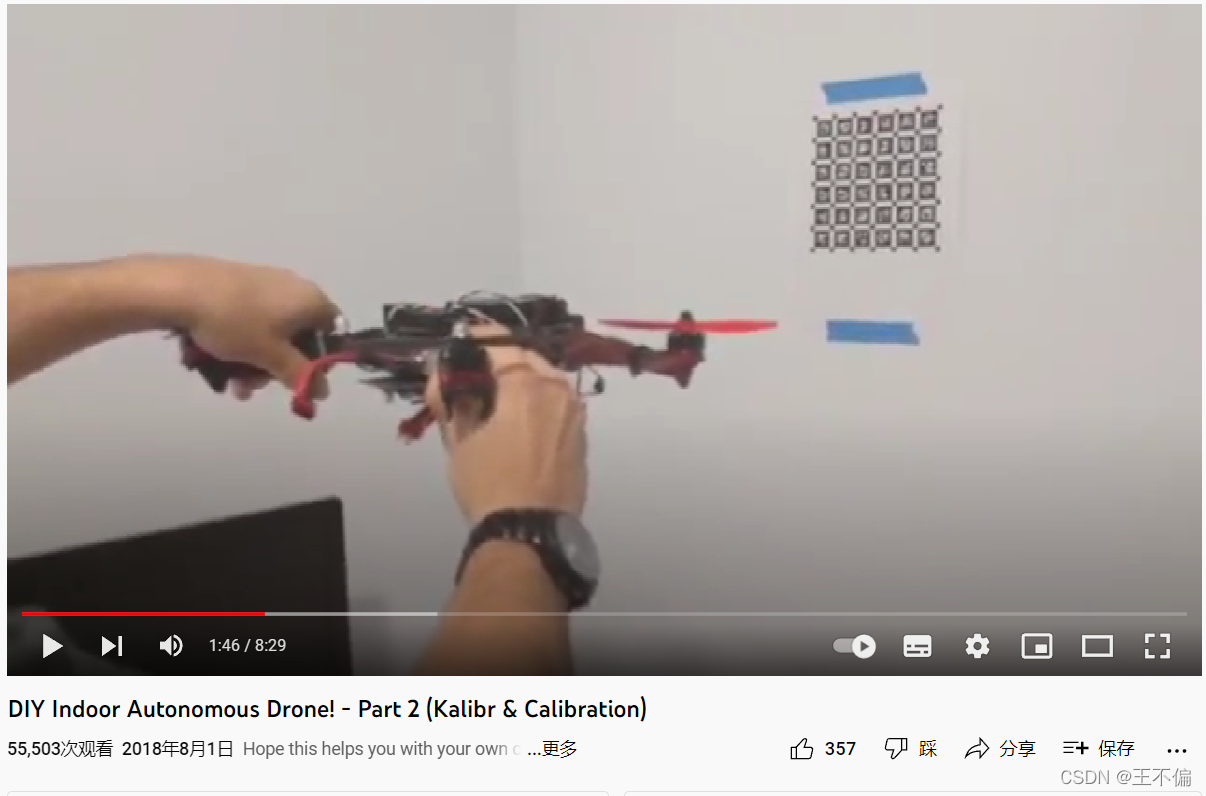
����ƽ��: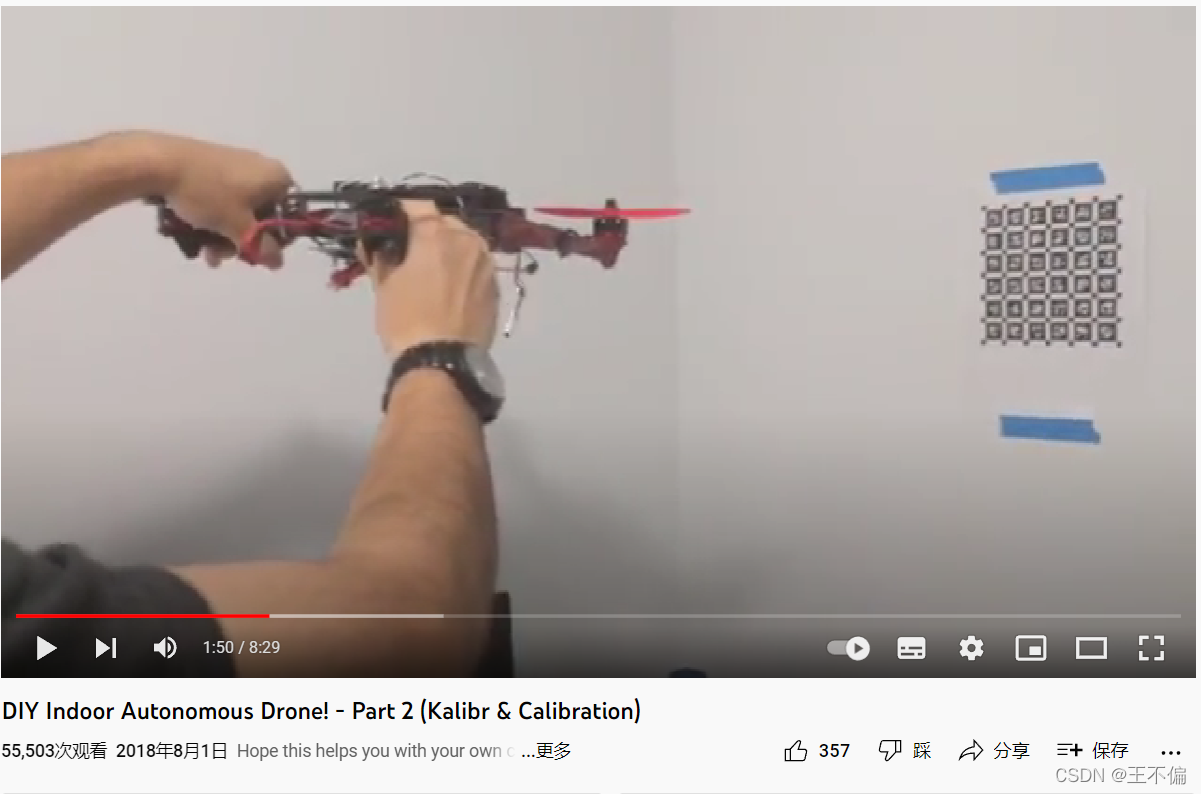
����ƽ��:
��ǰƽ��:
���ƽ��:
��������ƶ����(����)
ͼ���IMU�����ݶ��ɼ����Ժ�,�Ϳ���ͨ����������������ROS��bag����ʽ��
kalibr_bagcreater --folder dataset-dir --output-bag awsome.bag
����ͨ��rosbag info awsome.bag��������ɵ�bag���Dz��Ǻϸ�ġ�
��. ��дyaml�ļ�
ͬ������kalibr�궨��,camchain-camd435i.yaml,����ֱ��ʹ�����yaml�ļ�����:
(1)����궨��yaml�ļ�
cam0:
cam_overlaps: []
camera_model: pinhole
distortion_coeffs: [-0.14627678771168612, 0.031132819617662677, -0.0016199154527738965,
-0.01257776985511912]
distortion_model: radtan
intrinsics: [259.05353479443266, 256.15264741602005, 290.7955146414971, 234.21114661849504]
resolution: [640, 480]
rostopic: /color
(2)�½�imu.yaml
��kalibr��������Ŀ¼���½�imu.yaml�ļ�:
#Accelerometers
accelerometer_noise_density: 2.0477290485501922e-02 #Noise density (continuous-time)
accelerometer_random_walk: 4.2308969579290693e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 2.2488785808195085e-03 #Noise density (continuous-time)
gyroscope_random_walk: 1.5385085422768701e-05 #Bias random walk
rostopic: /imu #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)
ԭ������:https://blog.csdn.net/weixin_37661634/article/details/118902745
��������IMU�궨������֪(�궨���̲ο�:https://blog.csdn.net/Hanghang_/article/details/103546033),
�������Ӧ�������imu.yaml��ȥ:
Gyr:
avg-axis:
gyr_n: 2.2488785808195085e-03
gyr_w: 1.5385085422768701e-05
Acc:
avg-axis:
acc_n: 2.0477290485501922e-02
acc_w: 4.2308969579290693e-04
��.ʹ��Kalibr���б궨
��Kalibr����Ŀ¼��ִ�� source devel/setup.sh
ִ��ָ��:
kalibr_calibrate_imu_camera --target checkerboard.yaml --cam camd455i.yaml --imu imu.yaml --bag dynamic.bag --show-extraction
(����ʹ�èCshow-extraction����ֶδ���,��˲�ʹ��)����¼��2����,�����ļ�����Ϊ:
camchain-imucam-dynamic.yaml
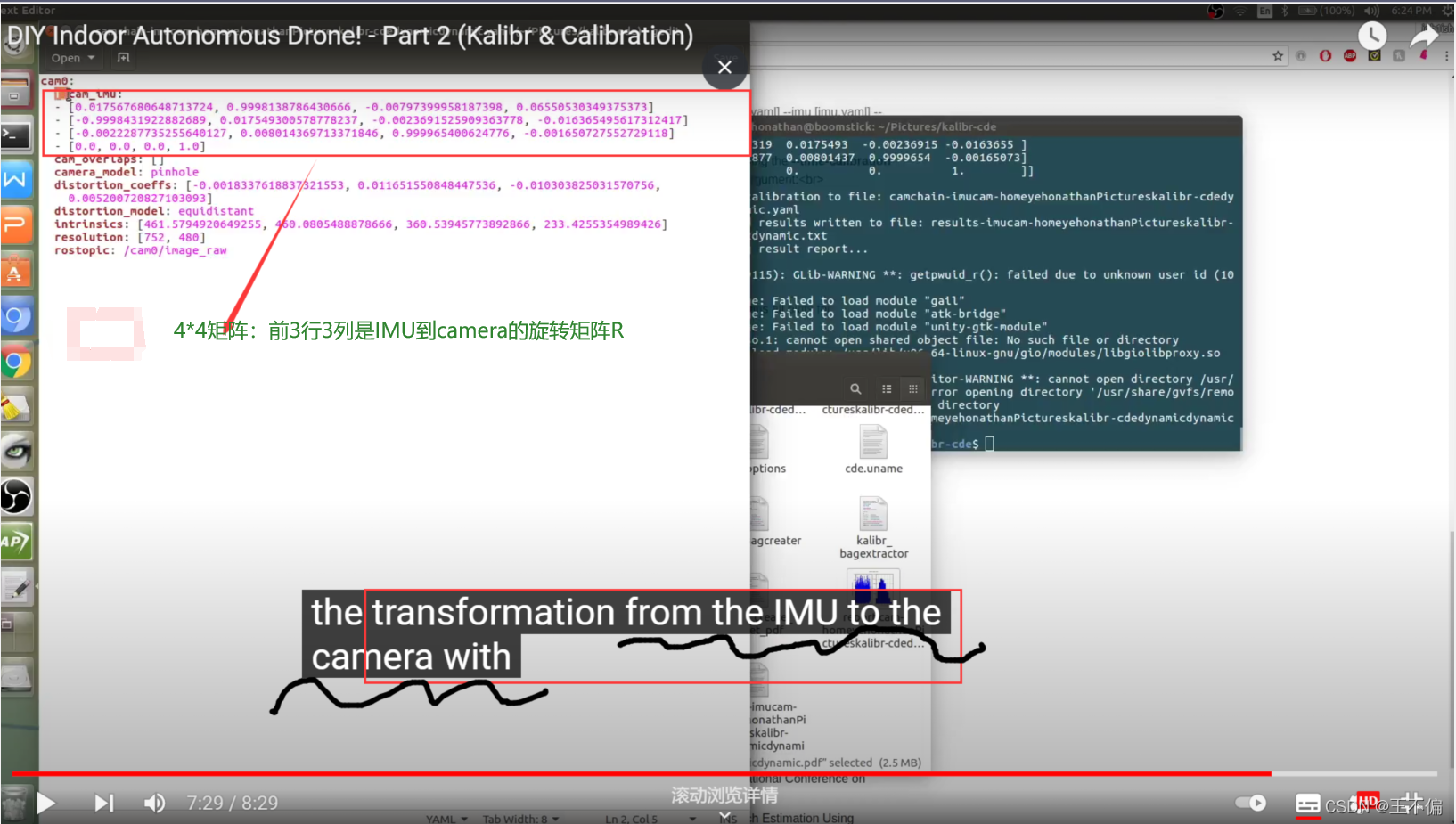
����T_cam_imu,����������Ҫ����Ρ�
����:ImportError: No module named scipy.optimize
����취:
sudo apt-get install python-scipy
������Щ�Ϳ������ĵȴ�����ˡ�����(��һ������:����ʱ��������¼�����ݰ��Ĵ�С�͵������ܶ���,��¼���˽���������,����������ǰ������,�����ٶȽ���,��������а��Сʱ����,����ȥ�ȱ������ٻ���������)
���ɺö���ļ�,��Ҫ��עһ���ļ�:
camchain-imucam-dynamic.yaml
Transformation (cam0):
-----------------------
T_ci: (imu0 to cam0):
[[ 0.99579733 0.0648917 0.06462771 -0.01794528]
[-0.06212431 0.99710033 -0.04394886 0.01608132]
[-0.06729222 0.03974921 0.9969412 -0.07784444]
[ 0. 0. 0. 1. ]]
T_ic: (cam0 to imu0):
[[ 0.99579733 -0.06212431 -0.06729222 0.01363058]
[ 0.0648917 0.99710033 0.03974921 -0.01177593]
[ 0.06462771 -0.04394886 0.9969412 0.07947285]
[ 0. 0. 0. 1. ]]
���ڲ����ļ��� ʹ����һ��˵��:ԭ������:https://blog.csdn.net/qq_21830903/article/details/111319119
���綼û������Ļ�,ͨ������kalibr_calibrate_imu_camera,���Ǿ��ܵõ�pdf,txt,��yaml3������ļ���
������Ҫ��עresults-imucam-%BAGNAME%.txt�ļ�,�������������������ǵı궨�Ƿ���Ч��
����reprojection�����ò�Ҫ����5������,T_ic/T_ci�����е�λ��Ӧ�ø����豸IMU��Camera��ʵ��λ����,һ��Ӧ���������ߺ��������ij߶ȵ���ֵ��
��������������������������������
��Ȩ����:����ΪCSDN���������ַɱ���С�˼�����ԭ������,��ѭCC 4.0 BY-SA��ȨЭ��,ת���븽��ԭ�ij������Ӽ���������
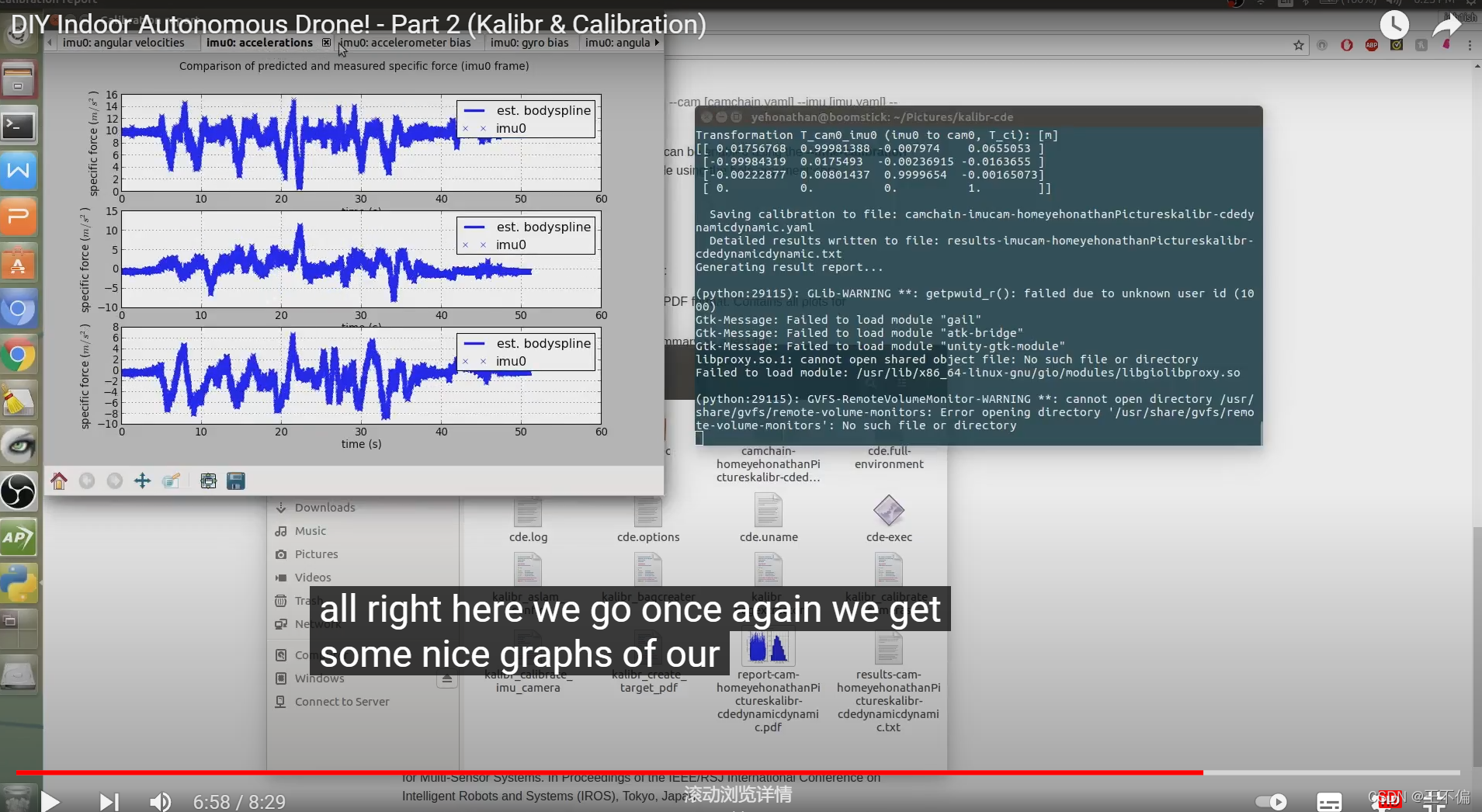
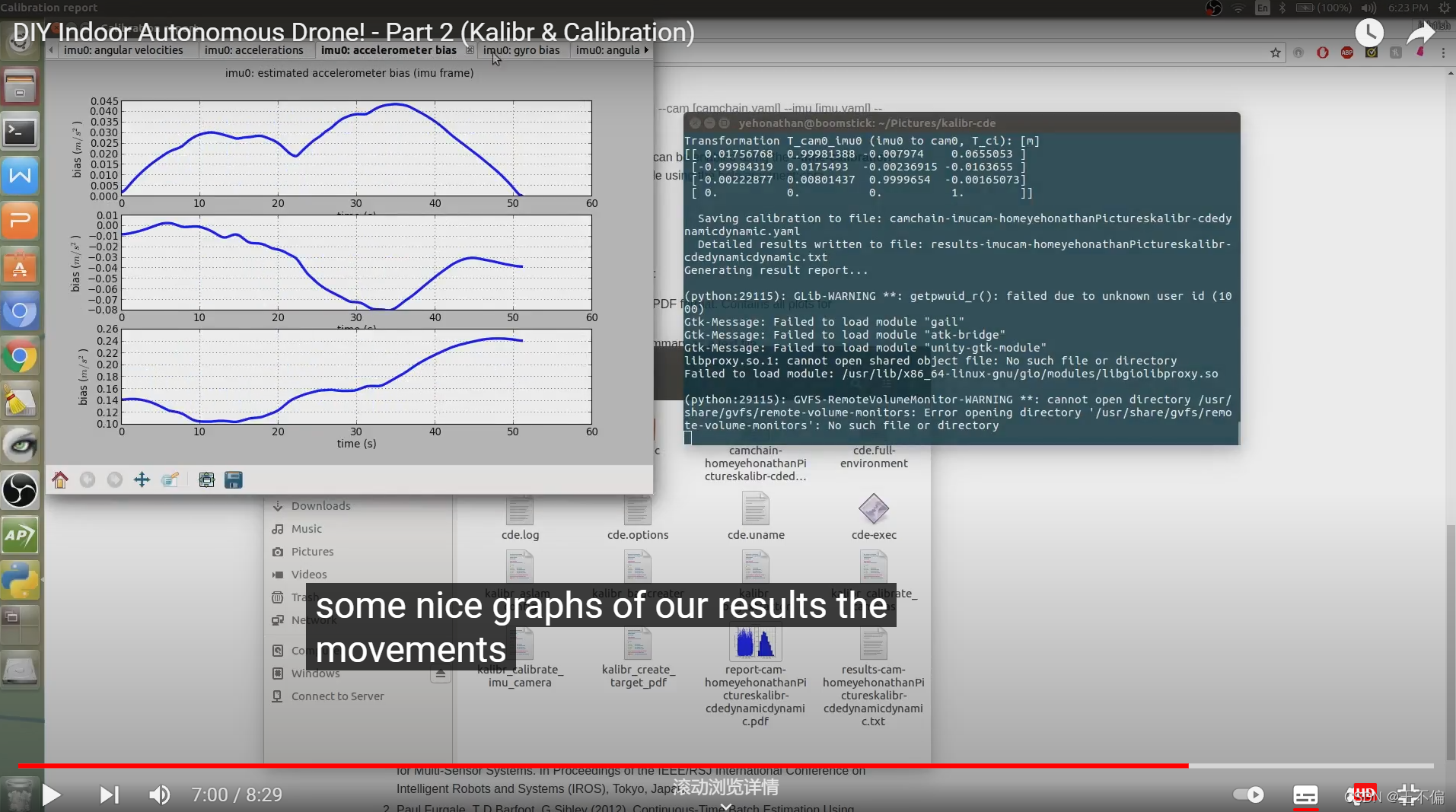
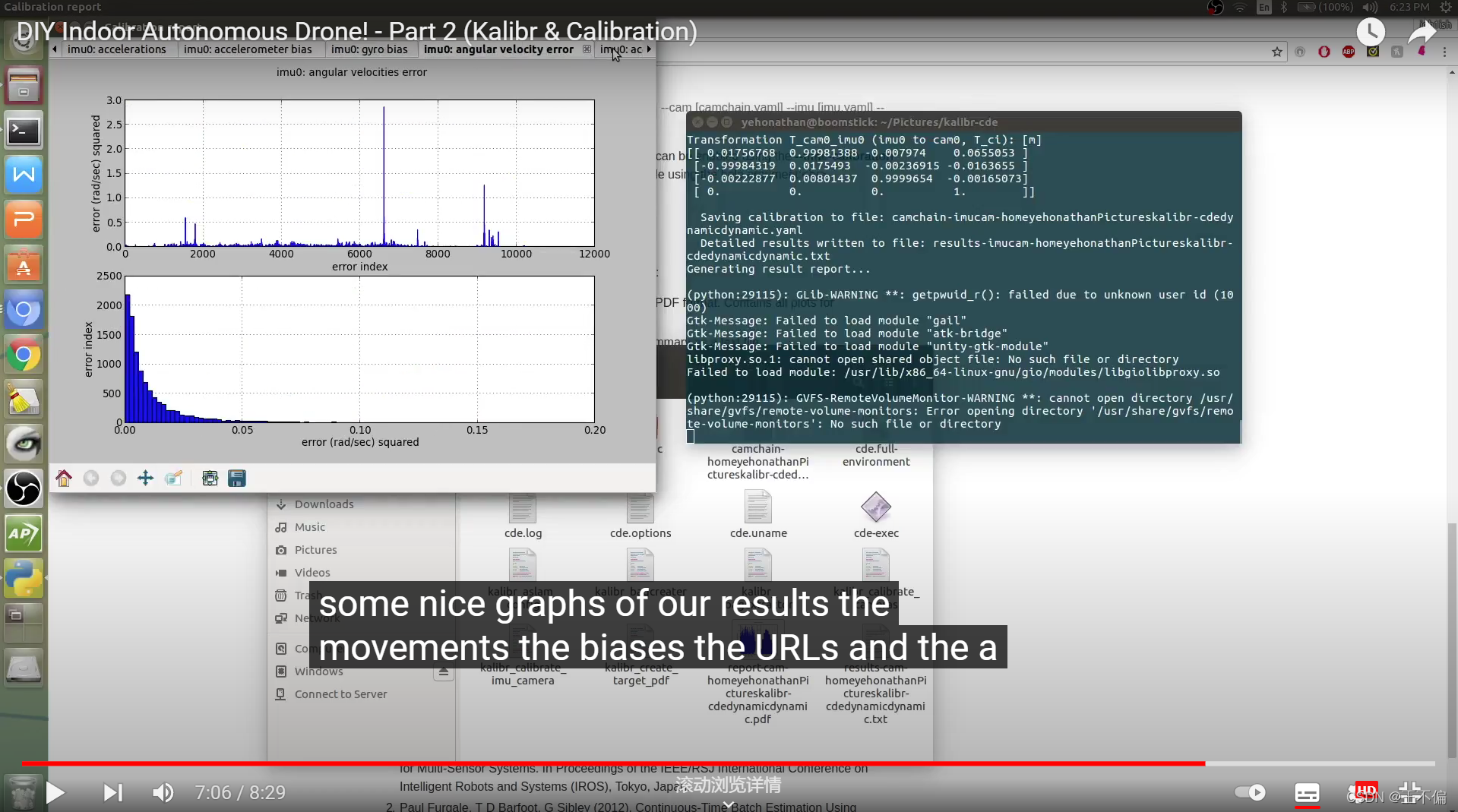
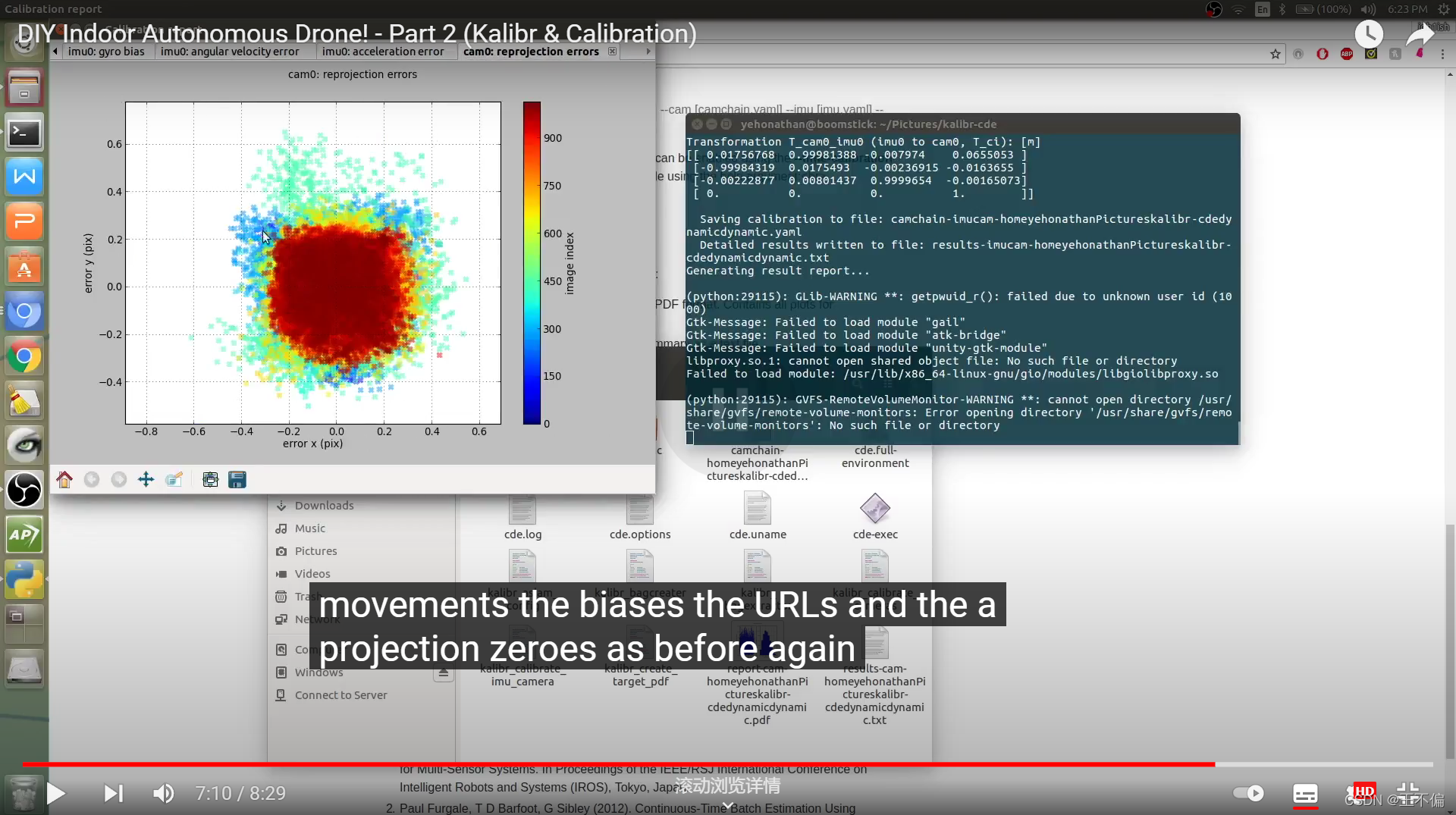
���ڲ����ļ��еIJ����Ĺٷ�˵��:
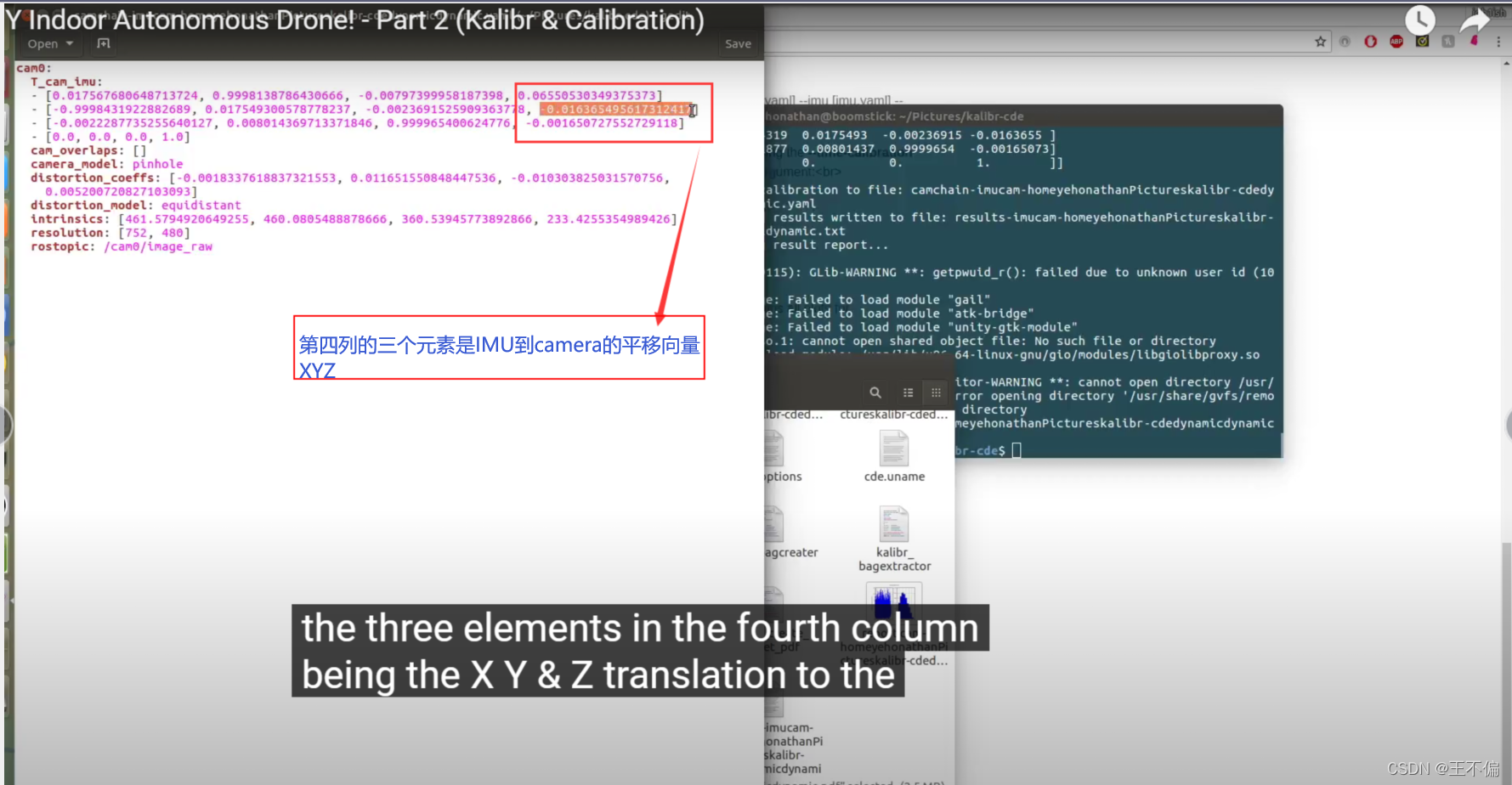
�ٷ���Ƶ��ʹ�õ�����:
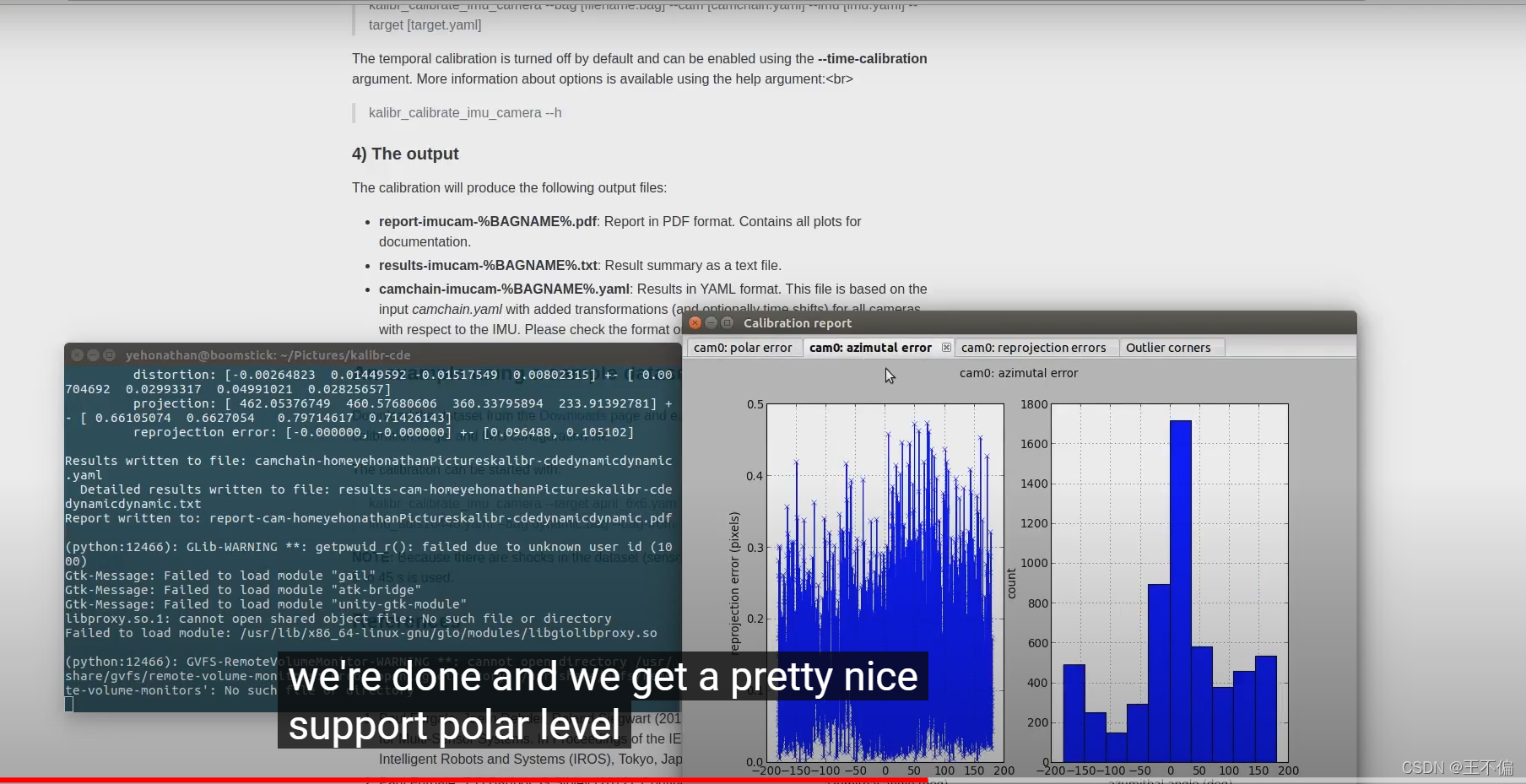
 ���ɵIJ����ļ���ͼ��(�������øߴ���,�־��ñ�ҵ������)
���ɵIJ����ļ���ͼ��(�������øߴ���,�־��ñ�ҵ������)
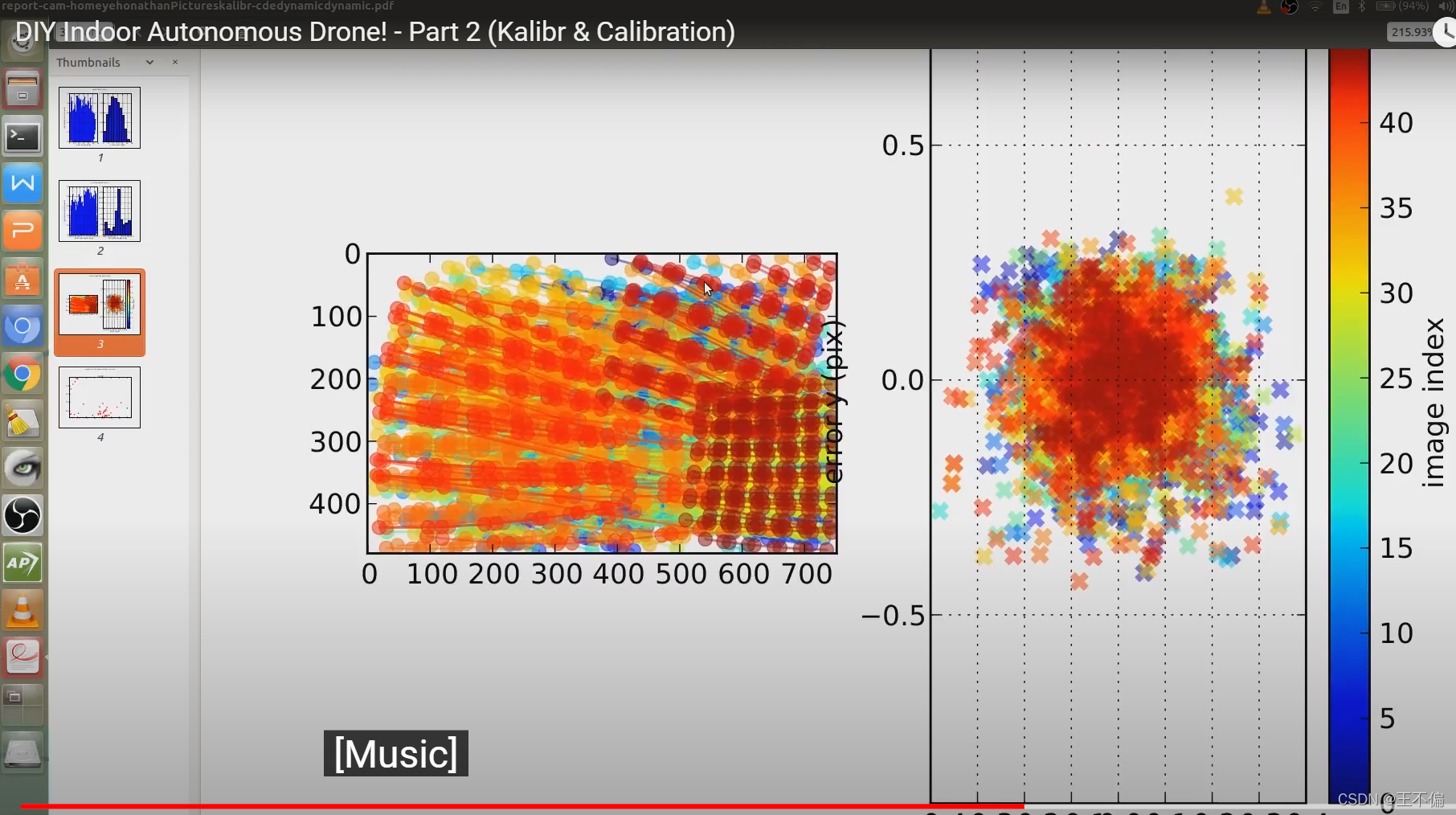
���ݻ����˹��ڱ궨������ɵ�ͼ����˵��:����ͼ��˵��
///
����IJ����д�̽��(ͼƬ���Թٷ���Ƶ)
��kalibr_calibration_imu_camera�ļ� ע�����и��Ǿ��ĵ�������
ע�����и��Ǿ��ĵ�������
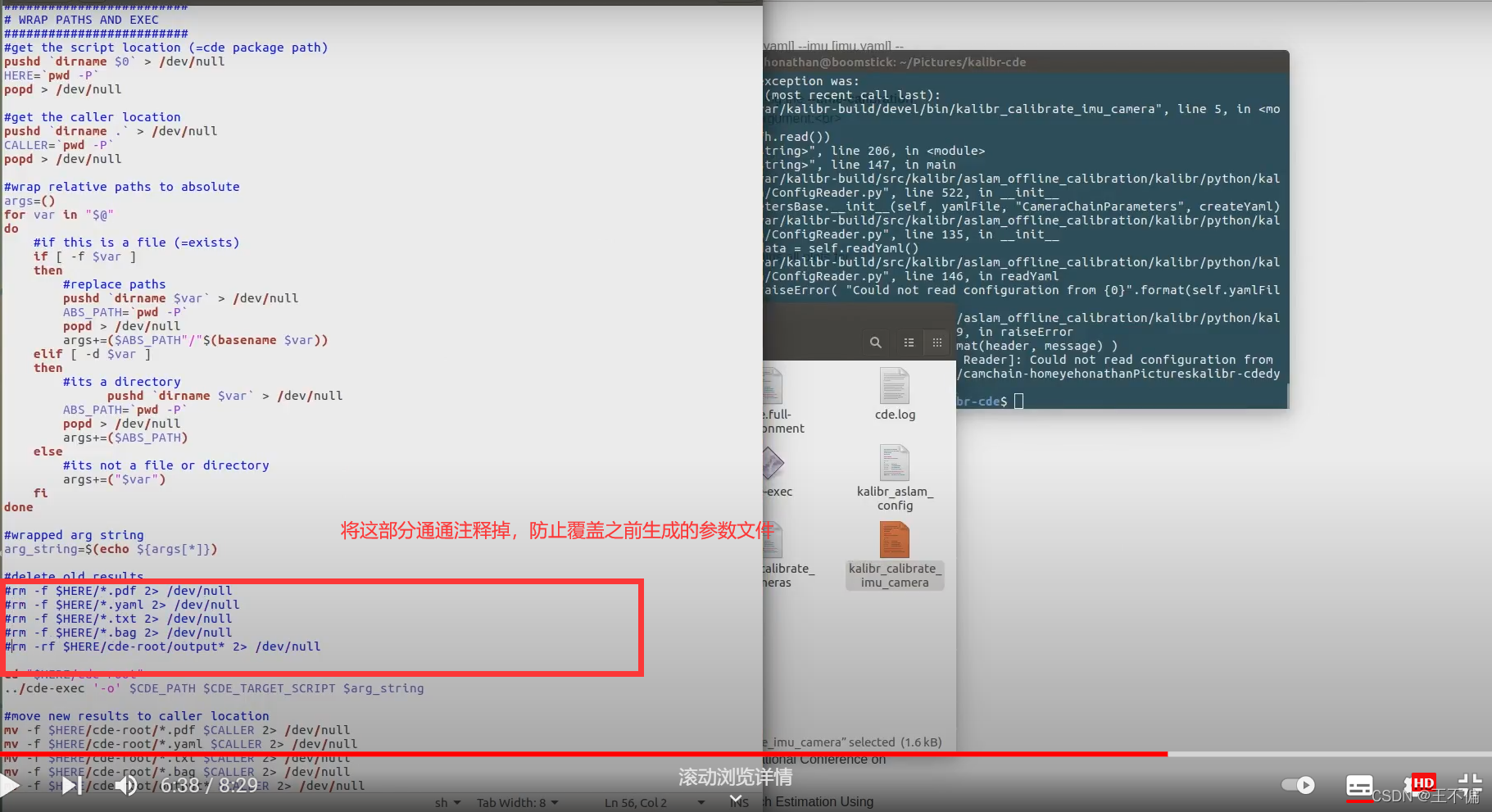
ʹ�����µı궨ִ������ �����˿�����������ͼ��
�����˿�����������ͼ��